Advances in Applied Mathematics
Vol.3 No.04(2014), Article
ID:14441,13
pages
DOI:10.12677/AAM.2014.34033
A Delayed Predator-Prey Model with Migration Rate and Holling-II Type Functional Response
School of Mathematics and Information Sciences, Guangzhou University, Guangzhou
Email: guozm@gzhu.edu.cn
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Sep. 16th, 2014; revised: Oct. 18th, 2014; accepted: Oct. 27th, 2014
ABSTRACT
In this paper, we study global dynamic properties of a predator-prey model with Holling-II functional response and predator migration, which reflect manual control. Because of the delay effect of predations on the variation of predator’s quantity, this model is a system of delayed differential equations. Firstly, we study the existence and stability of equilibria. Then, sufficient conditions are obtained which ensures that Hopf bifurcation occurs when the delay is regarded as a bifurcation parameter. We also derive computational formula for direction and stability of Hopf bifurcation by applying the center manifold theorem and norm form theory. Some numerical simulations illustrate the theoretical results.
Keywords:Delayed Differential System, Holling-II Functional Response, Migration Rate, Stability, Hopf Bifurcation

一类具有迁移率和Holling-II型功能性反应的时滞捕食–食饵模型
段全恒,郭志明
广州大学数学与信息科学学院,广州
Email: guozm@gzhu.edu.cn
收稿日期:2014年9月16日;修回日期:2014年10月18日;录用日期:2014年10月27日

摘 要
本文研究了一类捕食者具有人工控制迁移率的Holling-II型功能性反应的捕食-食饵模型的全局动力学性质。由于捕食者的捕食行为对其数量的变化有滞后效应,所以该模型是一个时滞微分方程组。首先研究了该系统平衡点的存在性和稳定性;接着以时滞为参数,分析Hopf分支存在的充分条件;利用中心流形定理和正规型理论给出确定Hopf分支周期解方向和稳定性的计算公式;最后对于理论结果给出了相应的数值模拟。
关键词
时滞微分方程系统,Holling-II型功能性反应,迁移率,稳定性,Hopf分支

1. 引言
农业生产中,害虫一直是影响农产品产量的主要因素,害虫泛滥会导致严重的经济问题,因而害虫控制逐渐成为许多学者研究的重要课题。传统控制害虫的方法主要是化学控制:即通过喷洒农药等化学药剂来消灭害虫,但农药的大量使用不仅会污染环境,毒杀天敌,破坏生态平衡,而且农产品本身也会有残毒。因此生物控制思想应运而生,生物控制是指通过投放害虫的天敌来控制害虫,不仅克服了化学控制的这些缺点,并且具有高效,成本低的特点[1] -[3] 。
把害虫–天敌看作一个捕食–食饵系统,天敌能否控制害虫实际上就是研究害虫与天敌是否能达到平衡状态。捕食–食饵系统因自然界中普遍存在的捕食关系而得到广泛研究,是生物数学中的重要研究对象。早在上个世纪二十年代,Lotka (1925)在对化学反应的研究中和Volterra (1926)对鱼类竞争系统的研究中分别独立地建立了经典的Lotka-Volterra捕食–食饵模型。1965年,Holling提出了三种功能性反应函数,使得捕食–食饵模型进一步完善。近些年来,许多学者相继对害虫控制问题做了研究,文献[4] [5] 考虑了害虫与天敌及杀虫剂之间的关系,建立并研究了害虫综合治理的数学模型。文献[6] -[8] 运用脉冲投放天敌及病虫感染来控制害虫。Hsu,Hwang和Kuang [9] 研究了一类具比率依赖的食物链模型,并将其理论运用到了生物控制中。文献[10] 提出了害虫生物控制的连续模型,考虑了捕食者的释放率。2003年,成定平[11] 建立了鼠类–天敌系统的捕食–食饵离散模型,其中捕食者的迁移率依赖于有效食饵,并分析了系统稳定性与捕食者迁移率的关系,上述模型均没考虑到时滞问题。2013年,Chen和Zhang [12] 在[11] 的基础上提出了连续的模型,人工投放天敌数量控制害虫。
然而我们注意到,文献[12] 建立的模型中,只考虑了捕食者的消化时间,没有考虑到功能性反应。当食饵的数量增大时,捕食者不会随之持续正比例增长,因为捕食者平均每天不可能也不需要这么多的 食饵,因此用
食饵,因此用 代替
代替 更合理,或考虑到捕食者捕食食饵需要花费一定的时间,即对每一捕食食饵有相应的处理时间,就有
更合理,或考虑到捕食者捕食食饵需要花费一定的时间,即对每一捕食食饵有相应的处理时间,就有 (参见[2] ) Holling-II功能性反应函数,因而本文在文献[12] 的基础上建立了一类具人工控制捕食者迁移率和Holling-II型功能性反应的时滞捕食–食饵模型,使之更符合实际生态意义并对该模型平衡点的存在性,稳定性及Hopf分支进行研究,运用中心流行定理和规范型理论,得到该害虫–天敌系统达到动态平衡的条件,并分析了这些条件与时滞和迁移率因素之间的关系。
(参见[2] ) Holling-II功能性反应函数,因而本文在文献[12] 的基础上建立了一类具人工控制捕食者迁移率和Holling-II型功能性反应的时滞捕食–食饵模型,使之更符合实际生态意义并对该模型平衡点的存在性,稳定性及Hopf分支进行研究,运用中心流行定理和规范型理论,得到该害虫–天敌系统达到动态平衡的条件,并分析了这些条件与时滞和迁移率因素之间的关系。
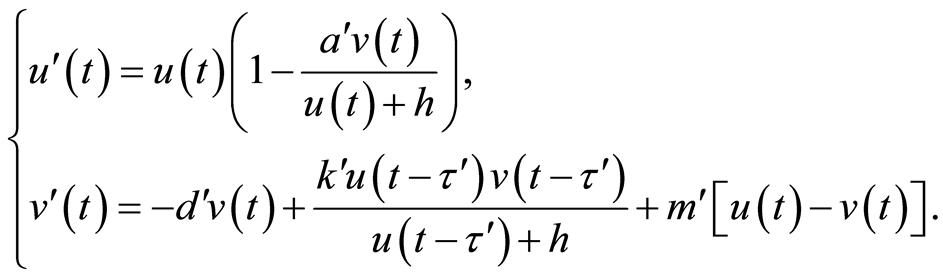
考虑如下的模型
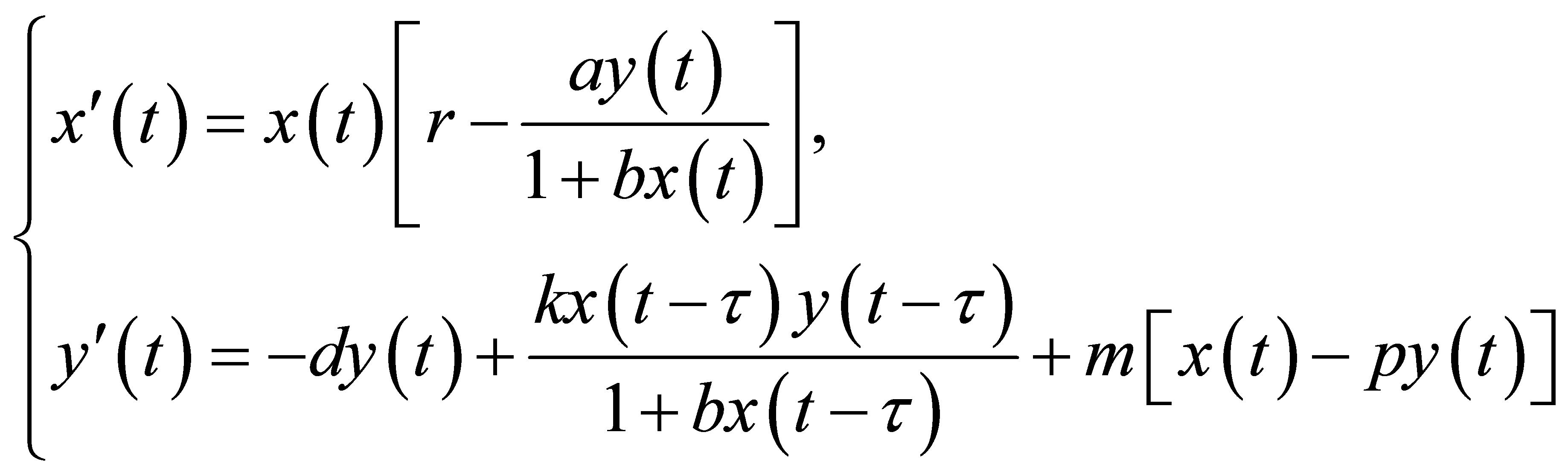 (1.1)
(1.1)
其中 分别是食饵种群与捕食者种群在
分别是食饵种群与捕食者种群在 时刻的密度;
时刻的密度; 为食饵的內禀增长率;
为食饵的內禀增长率; 表示捕
表示捕
食者对食饵的功能性反应; 为捕食者消化或妊娠所需的时间;
为捕食者消化或妊娠所需的时间; 是捕食者的死亡率;
是捕食者的死亡率; 为捕食者的迁移率;
为捕食者的迁移率;![]() 是单位时间内每个捕食者对食饵的最大消耗率。其中
是单位时间内每个捕食者对食饵的最大消耗率。其中 均为正常数,
均为正常数, 表示有效食饵,当
表示有效食饵,当 时,人工引进天敌。即人工投放天敌的投放率依赖于有效食饵数。通过无量
时,人工引进天敌。即人工投放天敌的投放率依赖于有效食饵数。通过无量
纲化,减少参数。令 ,则系统(1.1)化为如下形式:
,则系统(1.1)化为如下形式:
 (1.2)
(1.2)
其中
 ,
,
为简便起见,仍记 分别为
分别为 ,则有
,则有
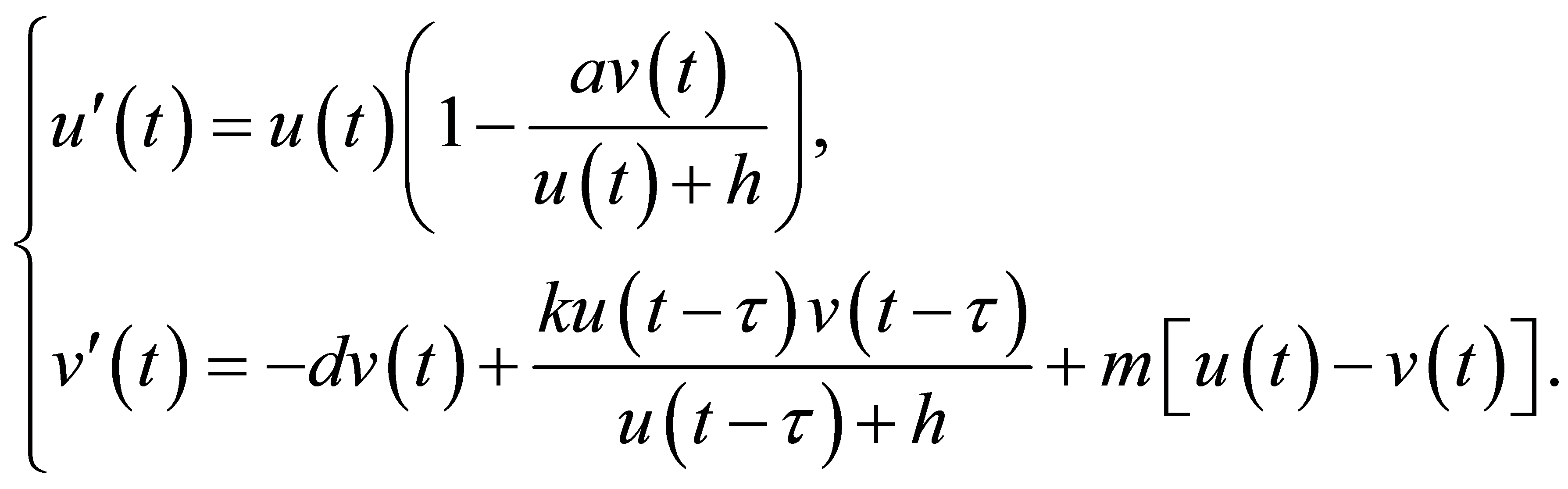 (1.3)
(1.3)
记 为从
为从 到
到 的连续函数所组成的Banach空间。从生物学的意义出发,本文只考虑系统(1.3)的满足以下初始条件的解:
的连续函数所组成的Banach空间。从生物学的意义出发,本文只考虑系统(1.3)的满足以下初始条件的解:

其中
 。
。
记 ,对于任意的
,对于任意的![]() 以及
以及![]() ,由Theorem 3.1 [13] 方程组(1.3)存在唯一的解
,由Theorem 3.1 [13] 方程组(1.3)存在唯一的解![]() ,并且当
,并且当 时,
时, ,又由Theorem 3.4 [13] ,可知
,又由Theorem 3.4 [13] ,可知 为系统(1.3)的正向不变集,符合生物意义。
为系统(1.3)的正向不变集,符合生物意义。
2. 平衡点的存在性、稳定性与Hopf分支出现的条件
首先确定系统(1.3)的非负平衡点。令 为其平衡点,则
为其平衡点,则
显然 总是系统的平衡点。当且仅当条件
总是系统的平衡点。当且仅当条件
 成立时,系统(1,3)存在唯一的正平衡点
成立时,系统(1,3)存在唯一的正平衡点 ,其中
,其中

即在 条件下,害虫–天敌可以共存。
条件下,害虫–天敌可以共存。
引理2.1 1)平凡平衡点 总是不稳定的。
总是不稳定的。
2) 假设 :
:![]() ,若条件
,若条件 满足,则
满足,则![]() 时,
时, 是局部渐近稳定的。
是局部渐近稳定的。
证明 在 处,系统(1,3)的线性化方程为
处,系统(1,3)的线性化方程为
相应的特征根为1和 ,因此
,因此![]() 总是不稳定的。
总是不稳定的。
系统(1,3)在 处的线性化方程为
处的线性化方程为

 。
。
记 ,则
,则 ,
, ,
, ,
, ,
, 。其对应的特征方程为
。其对应的特征方程为

即![]() 。
。
再令

故上式可以记为
![]() (2.1)
(2.1)
当![]() 时,方程(2,1)变为
时,方程(2,1)变为
![]() (2.2)
(2.2)
由 可知
可知 ,
, 。因此方程(2.2)和两个特征根
。因此方程(2.2)和两个特征根 ,
,![]() 满足
满足

从而,可得到 ,
, 。因此,当
。因此,当![]() 时,在
时,在 和
和 的假设条件下,
的假设条件下, 是局部渐近稳定的。证毕。
是局部渐近稳定的。证毕。
下面分析当![]() 时,系统正平衡点的稳定性与时滞的关系。
时,系统正平衡点的稳定性与时滞的关系。
当![]() 时,假设方程(2.1)对某个
时,假设方程(2.1)对某个 存在纯虚根
存在纯虚根 ,则有
,则有

分离实部和虚部,得
 (2.3)
(2.3)
两式分别平方相加得到
 (2.4)
(2.4)
再令

![]()
故(2.4)可写成
 (2.5)
(2.5)
由(2.5),令 ,易知如下引理:
,易知如下引理:
引理2.2 1) 当 时,方程只有唯一的正根
时,方程只有唯一的正根
2) 当 ,且
,且![]() 时,方程没有正根;
时,方程没有正根;
3) 当 ,且
,且![]() ,
,![]() 时,方程没有正根;
时,方程没有正根;
4) 当 ,且
,且![]() ,
,![]() 时,方程有唯一正根
时,方程有唯一正根 ;
;
5) 当 ,且
,且![]() 时,方程有唯一正根
时,方程有唯一正根 ;
;
6) 当 ,
,![]() ,且
,且![]() 时,方程有两个正根
时,方程有两个正根
定理2.1 假设条件 ,
, 满足,
满足,![]() 为
为 所对应的时滞,则有以下结论:
所对应的时滞,则有以下结论:
1) 若 ,则正平衡点
,则正平衡点 在
在 时是渐近稳定的,在
时是渐近稳定的,在 时不稳定,此时,系统(1.3)在
时不稳定,此时,系统(1.3)在![]() ,
, 产生Hopf分支。
产生Hopf分支。
2) a) ,
,![]() 或b)
或b) ,
,![]() 且
且 ,此时系统不存在纯虚根,即正平衡点
,此时系统不存在纯虚根,即正平衡点 是渐近稳定的。
是渐近稳定的。
3) 若 ,
,![]() ,且
,且 ,则正平衡点
,则正平衡点 在
在 渐近稳定。
渐近稳定。
4) 若 ,
,![]() ,则正平衡点
,则正平衡点 在
在 时是渐近稳定的,在
时是渐近稳定的,在 时是不稳定的,且系统(1.3)在
时是不稳定的,且系统(1.3)在![]() ,
, 产生Hopf分支。
产生Hopf分支。
5) 若 ,
,![]() ,且
,且 ,则正平衡点
,则正平衡点 在
在 渐近稳定,且系统(1.3)在
渐近稳定,且系统(1.3)在 ,
, 产生
产生 分支。
分支。
证明 由(2.3)可解得:
因此,当方程的正根为 时,令
时,令

则 ,
, 是方程(2.1)的纯虚根。显然
是方程(2.1)的纯虚根。显然 ,
, 且
且 ,但并不是对所有的
,但并不是对所有的 都有
都有 。由文献[14] 中定理3.4.1知,当条件
。由文献[14] 中定理3.4.1知,当条件 成立时,对于
成立时,对于 ,
, ,平衡点
,平衡点 局部稳定。
局部稳定。
下证横截条件满足Hopf分支的情况:假设 为方程(2.1)的根,满足
为方程(2.1)的根,满足 ,
, 。由文献[15] 可知,
。由文献[15] 可知,

其中 为式子(2.5)的左端部分,即
为式子(2.5)的左端部分,即![]() 。从而
。从而
 。
。
故当 取
取![]() ,
,![]() ,
,![]() ,
, 时,可依次判别其横截条件。由上面的分析通过代入计算可得:
时,可依次判别其横截条件。由上面的分析通过代入计算可得:
由此可知在![]() ,
, 的一个小右领域内,纯虚根会穿过虚轴,从而
的一个小右领域内,纯虚根会穿过虚轴,从而 在
在![]() 处会产生Hopf分支。
处会产生Hopf分支。

由上横截条件等于0只能得出正平衡点在 是渐近稳定的,暂得不出在大于
是渐近稳定的,暂得不出在大于![]() 的分支情况。
的分支情况。
同理计算与分析



综上可证得定理。证毕。
3. Hopf分支的方向与稳定性
本节由文献[16] 中介绍的Hopf分支定理,运用中心流形定理和规范型理论给出判定Hopf分支方向和周期解稳定性的计算公式,为简便,设 时系统在
时系统在 处产生Hopf分支,
处产生Hopf分支,![]() 是其对应的纯虚根。
是其对应的纯虚根。
作变换
![]() ,最后将
,最后将 记为
记为 ,则在正平衡点
,则在正平衡点 处,系统(1.3)化为
处,系统(1.3)化为
 (3.1)
(3.1)
其中

 .
.
从而系统(3.1)可写成等价的系统
 (3.2)
(3.2)
其中
非线性部分

其中


记 ,其中
,其中 在
在 上
上 次连续可微,
次连续可微,
记![]() ,对
,对 。定义
。定义![]() 为:
为:

由Riesz表示定理存在有界变差二阶函数矩阵![]() 。使得
。使得

本文系统中,选取 即可,其中
即可,其中

对于 ,定义
,定义

从而(3.2)式可以等价的写成:
 (3.3)
(3.3)
其中 。
。
对于 ,其中
,其中 是2维复行向量空间,定义
是2维复行向量空间,定义
进一步,对于 ,定义双线性形式如下:
,定义双线性形式如下:

于是 与
与 互为伴随算子,
互为伴随算子, (参见[17] ),由前面的讨论及变换
(参见[17] ),由前面的讨论及变换 可知,
可知, 为
为 的特征值,从而也是
的特征值,从而也是 的特征值,通过计算可直接得到以下结论:
的特征值,通过计算可直接得到以下结论:
引理3.1 向量 为算子
为算子 关于
关于 的特征向量,
的特征向量,![]() 为算子
为算子 关于
关于 的特征向量,并且
的特征向量,并且
其中 。
。
证明 设算子 关于特征值
关于特征值 的特征向量为
的特征向量为 ,故由
,故由 ,故
,故 满足
满足

故 ,解得
,解得 ,同理可设
,同理可设 关于
关于 的特征向量为
的特征向量为![]() ,由
,由![]() ,可得
,可得 。
。
因为

要使得 ,只需取
,只需取
即可。文献[16] 已证得 。证毕。
。证毕。
下面运用文献([16] )中的方法,具体研究系统(1.3)的Hopf分支的方向及稳定性。周期解的方向和稳定性分别由 和
和 决定。其中:
决定。其中:

 (参见文献[16] )
(参见文献[16] )
首先计算在 时系统在中心流形
时系统在中心流形 的坐标。令
的坐标。令 为(3.1)在
为(3.1)在 时的解,定义
时的解,定义
 (3.4)
(3.4)
在中心流形 上,有
上,有 ,其中展成幂级数的形式,即
,其中展成幂级数的形式,即

 和
和 为中心流形
为中心流形 在
在![]() 和
和 方向上的局部坐标,分析在中心流形
方向上的局部坐标,分析在中心流形 上抽象方程(3.3)的解
上抽象方程(3.3)的解 可得
可得

其中
 令
令
 (3.5)
(3.5)
从而可将上面的方程记为
 (3.6)
(3.6)
只要求出 就得到了限制在中心流行上的规范型。又由(3.4)式有:
就得到了限制在中心流行上的规范型。又由(3.4)式有:

从而可得:
结合![]() 的表达式,比较(3.5)式左右两边的系数,得到
的表达式,比较(3.5)式左右两边的系数,得到
接下来还需计算出 的值,即等价于计算出
的值,即等价于计算出 的值。由于式子(3.3)和(3.6)可得:
的值。由于式子(3.3)和(3.6)可得:
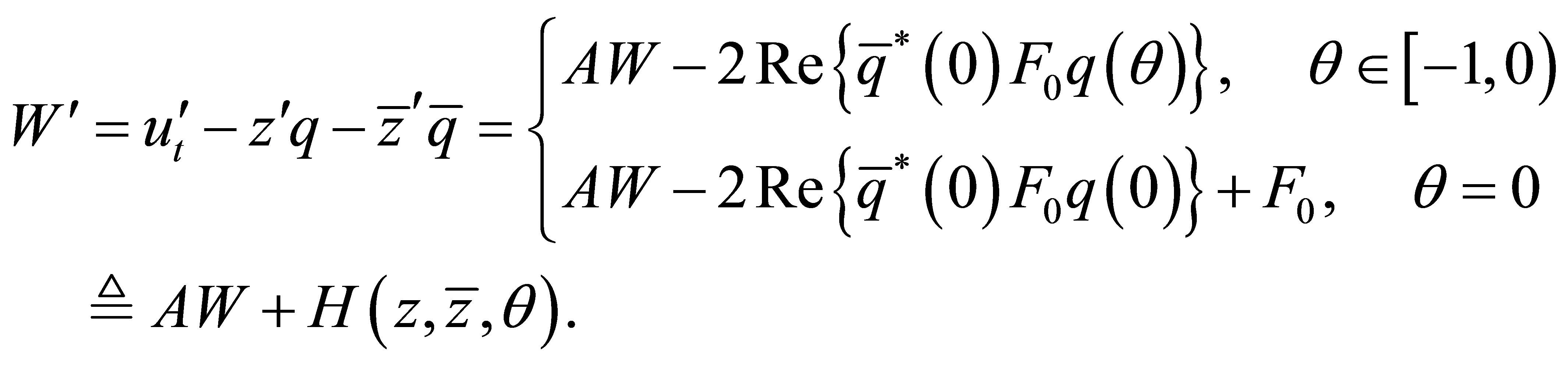 (3.7)
(3.7)
其中
 (3.8)
(3.8)
另一方面,在中心流形上,在原点附近将(3.7)式的右端幂级数展开,并比较相应系数,得到:
 (3.9)
(3.9)
对 ,由(3.7)式可知:
,由(3.7)式可知:
 (3.10)
(3.10)
将式(3.10)和(3.8)比较相应系数可得:
 (3.11)
(3.11)
 (3.12)
(3.12)
由(3.9)式与 的定义,可得:
的定义,可得:

因此,由常数变易法解得:
 (3.13)
(3.13)
同理可得
 (3.14)
(3.14)
其中 是二维向量,其值可以通过
是二维向量,其值可以通过![]() 时
时 的值来确定。事实上,因为
的值来确定。事实上,因为![]() 时,
时,
 。
。
有
由式(3.9)和 的定义可得:
的定义可得:

将(3.13)和(3.14)式带入上面两个方程,则可分别求得:
从而就可求得 的值,限制在中心流行上的约化方程被求出。且可知
的值,限制在中心流行上的约化方程被求出。且可知 完全由系统(1.3)的参数和时滞量决定。计算出
完全由系统(1.3)的参数和时滞量决定。计算出 。从而由文献[16] 中定理可得:
。从而由文献[16] 中定理可得:
定理3.1 在假设条件 满足时,
满足时, 是系统(3.1)的Hopf分支值,分支方向由
是系统(3.1)的Hopf分支值,分支方向由 决定;分支周期解的稳定性由
决定;分支周期解的稳定性由 决定。具体地,有:
决定。具体地,有:
1) 若 ,则系统的Hopf分支是上临界(下临界)的;
,则系统的Hopf分支是上临界(下临界)的;
2) 若 ,则分支周期解是渐近相位的轨道渐近稳定(不稳定)。
,则分支周期解是渐近相位的轨道渐近稳定(不稳定)。
4. 数值模拟
上述结果为计算Hopf分支的性质提供了清晰的公式。当参数 满足条件
满足条件 时,可用Mathlab软件进行计算与模拟。
时,可用Mathlab软件进行计算与模拟。
取 ,并且设初始条件为
,并且设初始条件为 。则系统(1.2)有
。则系统(1.2)有
两个平衡点 和
和 。经计算:
。经计算:
当 时,
时, ;
; 时,
时,![]() 且
且 时,
时,![]() ;当
;当 或
或 时,
时, ,其中
,其中 ,
, ,
, 。
。
由定理(2.1)可知:
1) 若 ,则
,则 在
在 时稳定,在
时稳定,在 不稳定,
不稳定,![]() 为Hopf分支点。相应的取
为Hopf分支点。相应的取![]() ,
,
则![]() 在
在 稳定,在
稳定,在 不稳定。其中
不稳定。其中 ,且在
,且在 处产生Hopf分支。取
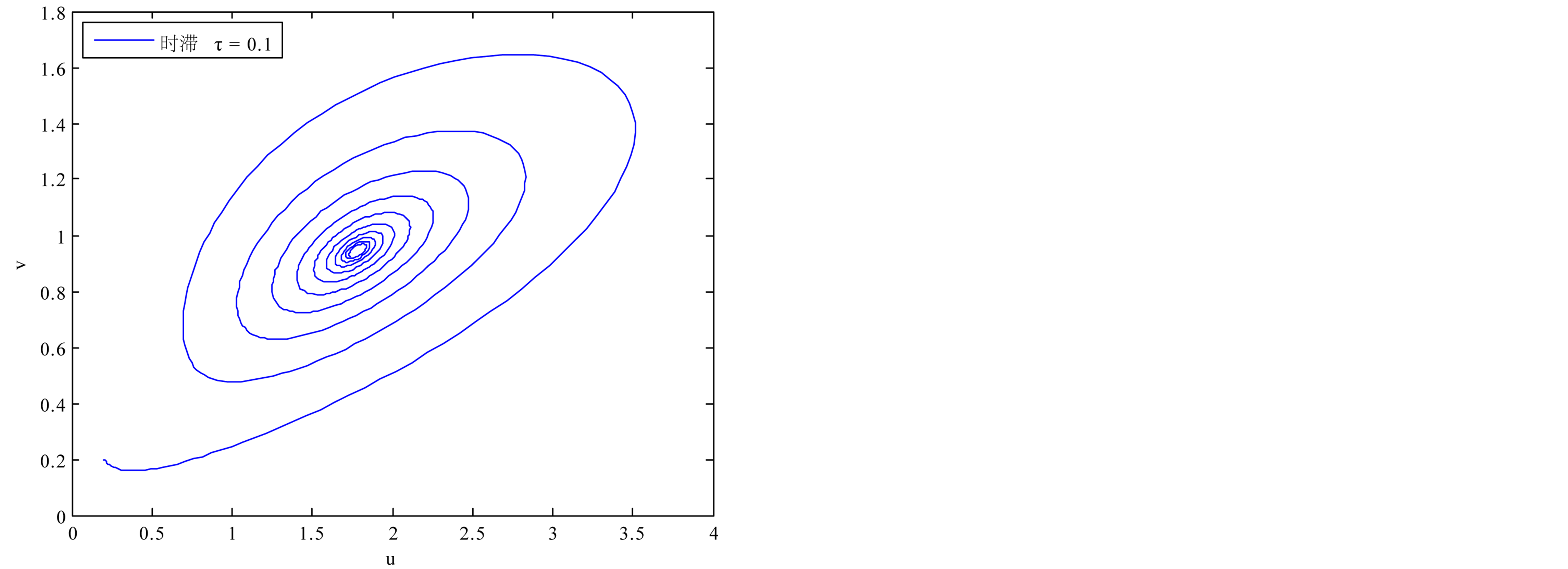
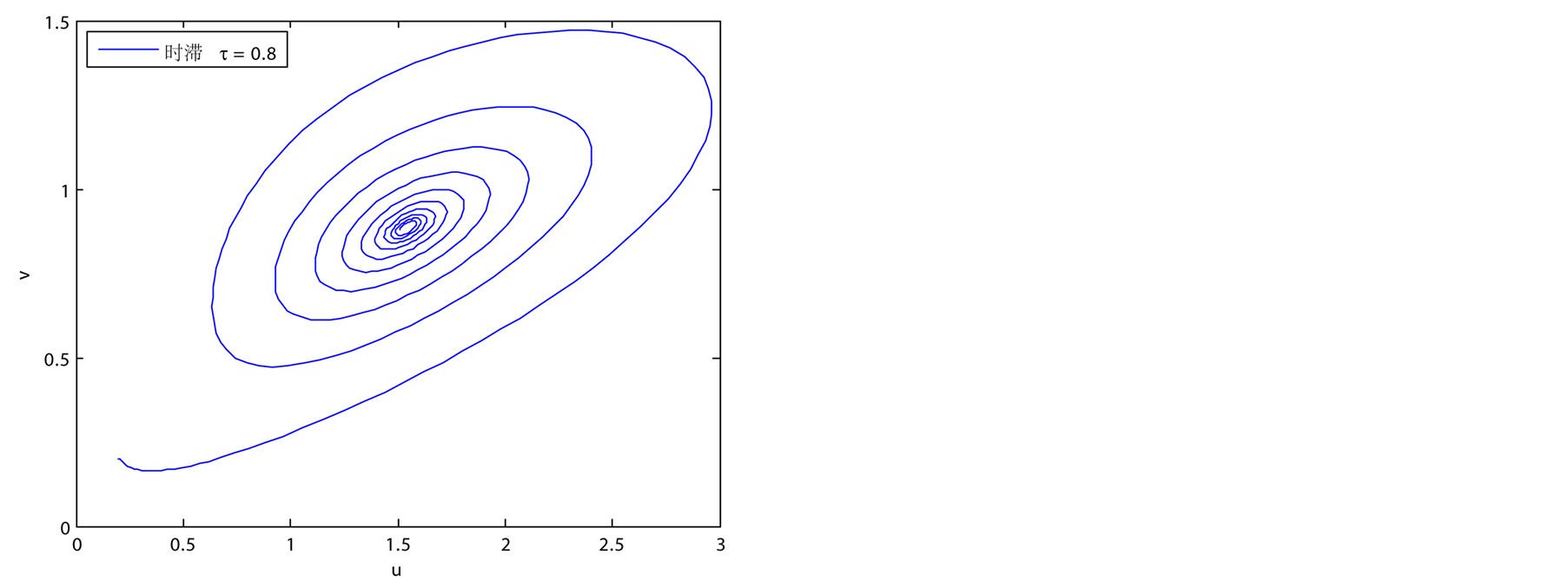
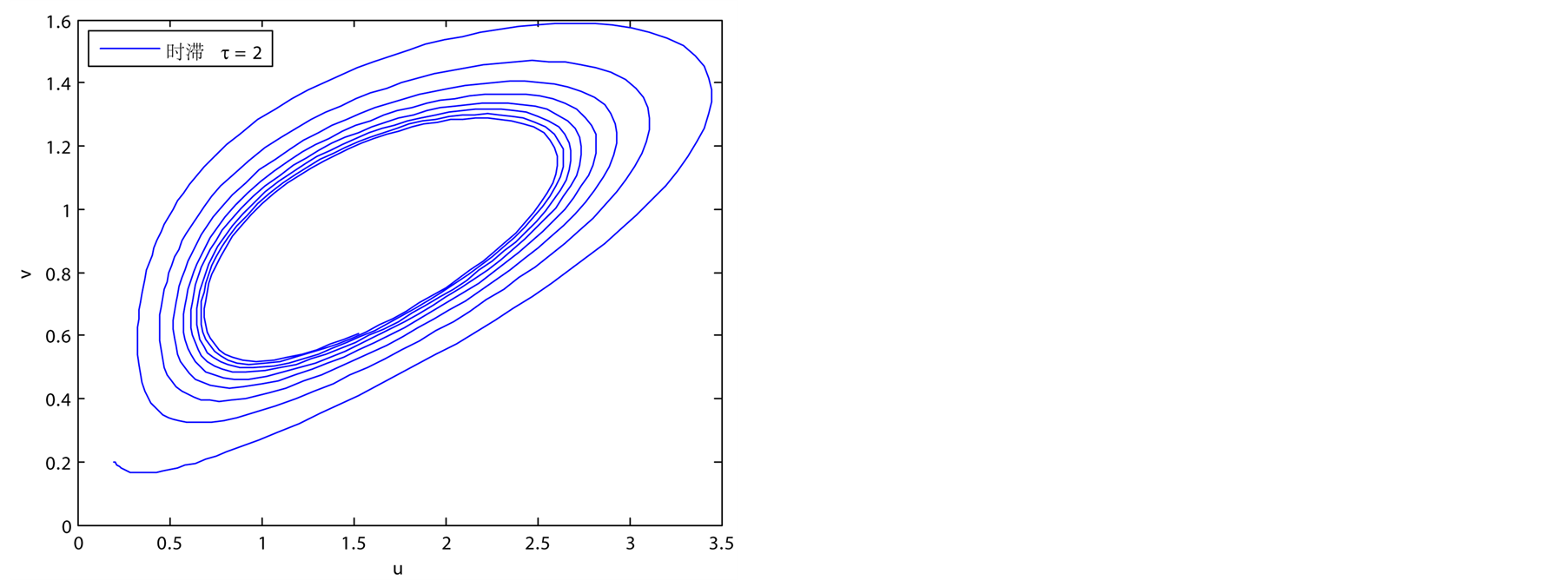
处产生Hopf分支。取![]() 此时
此时 稳定,取
稳定,取![]() 会出现周期解。如下图:
会出现周期解。如下图:

![]() 时,正平衡点
时,正平衡点
 稳定
稳定![]() 时,系统有周期解
时,系统有周期解
2) 若 ,则
,则 稳定。取
稳定。取![]() 则
则![]() 总是稳定的。分别取
总是稳定的。分别取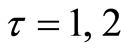 ,如下图:
,如下图:

 时,正平衡点
时,正平衡点 稳定
稳定
3) 若 ,则
,则 在
在 时稳定,在
时稳定,在 不稳定,
不稳定,![]() 为Hopf分支点。取
为Hopf分支点。取 ,则
,则![]() 在
在 稳定,在
稳定,在 不稳定。其中
不稳定。其中 ,且在
,且在 处产生Hopf分支。取
处产生Hopf分支。取![]() 此时
此时 稳定,取
稳定,取![]() 会出现周期解。如下图:
会出现周期解。如下图:

![]() ,
, 时,正平衡点
时,正平衡点
 稳定
稳定![]() 时,系统有周期解
时,系统有周期解
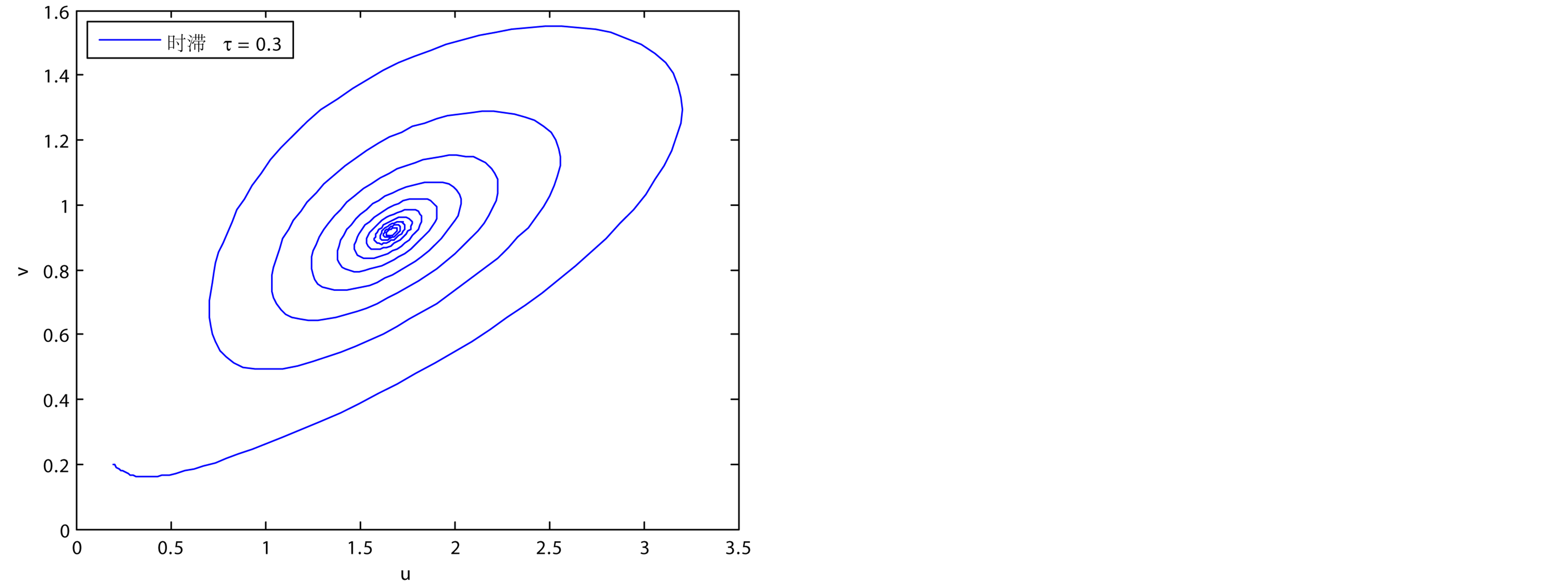
4) 若 ,则
,则 在
在 时稳定,且时滞可能会影响稳定性。取
时稳定,且时滞可能会影响稳定性。取![]() ,则
,则![]() 在
在 稳定,在
稳定,在 不稳定。其中
不稳定。其中 ,
, 。取
。取![]() ,此时
,此时 稳定,取
稳定,取![]() 会出现周期解。如下图:
会出现周期解。如下图:
![]() 时,正平衡点,
时,正平衡点,
 稳定,
稳定,![]() 时,系统有周期解
时,系统有周期解
5. 结论
本文以生物控制为背景,将害虫–天敌这一生态系统建立生物数学模型,通过人工迁入天敌的数量来控制害虫。该模型中捕食者具有Holling-II功能性反应函数更加符合生物意义。同时研究了天敌迁移率与时滞对该系统的影响。通过分析可以, 平衡点总是不稳定的,即害虫和天敌全部灭绝这种情况在实际中也是不现实的。而在
平衡点总是不稳定的,即害虫和天敌全部灭绝这种情况在实际中也是不现实的。而在 条件下,存在正平衡点
条件下,存在正平衡点 ,当时滞变化使得正平衡点的稳定性发生变化时,会出现Hopf分支,运用中心流形定理和规范型理论给出了分支的方向和周期解。
,当时滞变化使得正平衡点的稳定性发生变化时,会出现Hopf分支,运用中心流形定理和规范型理论给出了分支的方向和周期解。 表示当捕食者的净增长率小于捕食者的消化率及迁进的捕食者的捕食率之和时,害虫与天敌能达到一个平衡态,
表示当捕食者的净增长率小于捕食者的消化率及迁进的捕食者的捕食率之和时,害虫与天敌能达到一个平衡态,![]() 说明投放的天敌的捕食率大于害虫的內禀增长率时,在没有时滞的情况下,通过投放天敌,害虫与天敌能达到动态平衡,当时滞大于0时,由定理2.1(2),我们可根据
说明投放的天敌的捕食率大于害虫的內禀增长率时,在没有时滞的情况下,通过投放天敌,害虫与天敌能达到动态平衡,当时滞大于0时,由定理2.1(2),我们可根据 与具体参数
与具体参数 之间满足的条件来投放天敌的数量,同样可使得这个生态系统达到稳定状态,从而控制害虫的数量在经济危害水平之下,使得农业生产不受损害。 然而,本文暂只考虑了迁移率
之间满足的条件来投放天敌的数量,同样可使得这个生态系统达到稳定状态,从而控制害虫的数量在经济危害水平之下,使得农业生产不受损害。 然而,本文暂只考虑了迁移率![]() 的情形,之后可分析迁移率与有效食饵的数量关系,当有足够的食饵数时,迁移量可为0,从而更好的应用于害虫控制的实际问题。
的情形,之后可分析迁移率与有效食饵的数量关系,当有足够的食饵数时,迁移量可为0,从而更好的应用于害虫控制的实际问题。
参考文献 (References)
- [1] 马世骏 (1976) 谈农业害虫的综合防治. 昆虫学报, 2, 129-140.
- [2] 陈兰荪, 井竹君 (1984) 捕食者–食饵相互作用中微分方程的极限环存在性和唯一性. 科学通报, 9, 521-523.
- [3] DeBach, P. and Rosen, D. (1991) Biological control by natural enemies. CUP Archive.
- [4] Barclay, H.J. (1982) Models for pest control using predator release, habitat management and pesticide release in combination. Journal of Applied Ecology, 19, 337-348.
- [5] Tang, S.Y., Tang, G.Y. and Cheke, R.A. (2010) Optimum timing for integrated pest management: Modelling rates of pesticide application and natural enemy releases. Journal of Theoretical Biology, 264, 623-638.
- [6] 焦建军, 陈兰荪 (2007) 具非线性传染率与生物化学控制的害虫管理SOI模型. 应用数学和力学, 4, 487-496.
- [7] Wang, X., Guo, Z. and Song, X.Y. (2011) Dynamical behavior of a pest management model with impulsive effect and nonlinear incidence rate. Computational & Applied Mathematics, 30, 381-398.
- [8] 傅金波, 陈兰荪 (2011) 无公害害虫治理策略的数学研究. 数学实践与认识, 2, 144-150.
- [9] Hsu, S.B., Hwang, T.W. and Kuang, Y. (2003) A ratio-dependent food chain model and its applications to biological control. Mathematical Biosciences, 181, 55-83.
- [10] Zhu, G.H. and Chen, L.S. (2008) Pest management about omnivora with continuous biological control. International Journal of Pure and Applied Mathematics, 44, 41-49.
- [11] 成定平 (2003) 鼠类–天敌系统渐近稳定性的数学分析. 生物数学学报, 3, 283-286.
- [12] Chen, Y.M. and Zhang, F.Q. (2013) Dynamics of a delayed predator-prey model with predator migration. Applied Mathematical Modelling, 37, 1400-1412.
- [13] Smith, H. (2011) An introduction to delay differential equations with sciences applications to the life. Springer, New York.
- [14] Kuang, Y. (1993) Delay differential equations with applications in population dynamics. Academic Press, New York.
- [15] Wang, Z.H. (2012) A very simple criterion for characterizing the crossing direction of time-delay systems with delay-dependent parameters. International Journal of Bifurcation and Chaos, 22.
- [16] Hassard, B.D., Kazarinoff, N.D. and Wan, Y.H. (1981) Theory and applications of Hopf bifurcation. Cambridge University Press, Cambridge.
- [17] 魏俊杰, 王洪滨, 蒋卫华 (2012) 时滞微分方程的分支理论及应用. 科学出版社, 北京.