 Advances in Energy and Power Engineering 电力与能源进展, 2013, 1, 64-71 http://dx.doi.org/10.12677/aepe.2013.12012 Published Online June 2013 (http://www.hanspub.org/journal/aepe.html) Study to Improve the Wind Energy Conversion Efficiency with the Variable Speed Control Ying Deng1,2, Dan Zhang1,2, Feng Zhou1,2, Xubo Tong1,2, De Tian1,2 1National Key Laboratory of New Energy Power System, North China Electric Power University, Beijing 2School of Energy, Power and Mechanical Engineering, North China Electric Power University, Beijing Email: dengying25@163.com Received: Feb. 21st, 2013; revised: Mar. 28th, 2013; accepted: Apr. 8th, 2013 Copyright © 2013 Ying Deng et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unre- stricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract: Based on the generation principle and power optimizing control principle of VSCF(variable speed constant frequency) doubly-fed wind turbine, this paper built the DFIG wind turbine, PWM converter, fuzzy variable speed con- troller, and other part of simulation models with software PSCAD. In the accordance with maximum power tracking principle of doubly-fed wind turbine, the converter control mode of generator side and the fuzzy control algorithm is brought in. On the basis of the fuzzy control principle, the design of the controller is completed in PSCAD. The effec- tiveness and feasibility of the designed method which is based on fuzzy control are demonstrated in the simulation re- sults. It is proved that the wind energy conversion efficiency is increased by 0.1 with the variable speed control of opti- mization fuzzy. Keywords: Doubly-Fed Induce Generator; Maximum Power Tracking; Fuzzy Control; Generator Rotor-Side Converter; SVPWM 提高风电机组风能转化效率的变速控制技术研究 邓 英1,2,张 丹1,2,周 峰1,2,仝旭波 1,2,田 德1,2 1华北电力大学新能源电力系统国家重点实验室,北京 2华北电力大学可再生能源学院,北京 Email: dengying25@163.com 收稿日期:2013 年2月21 日;修回日期:2013年3月28日;录用日期:2013 年4月8日 摘 要:本文根据双馈式变速恒频风力发电机组工作原理、发电特性和功率优化的控制原理,建立了基于电力 系统电磁暂态PSCAD 软件的双馈式风力发电组、PWM 变流器和模糊控制器数学模型。根据风电机组变速控制 最大功率跟踪控制策略,给出了 PWM 变流器的网侧和电机侧变速控制算法。同时,对变速控制器中引进的模 糊控制算法进行了改进,根据控制原理在 PSCAD 软件中设计了实现方法。仿真结果证明了实现最大功率跟踪 控制方法的有效性。验证了采用优化模糊变速控制,可提高双馈式变速恒频风电机组能量转化效率 10%。 关键词:双馈感应发电机 DFIG;最大功率跟踪;模糊控制;电机转子侧变流器;SVPWM 1. 引言 随着能源匮乏、环境污染日趋严重的紧迫形势, 风力发电在世界迅猛发展。变速恒频风电机组作为 主流机型,其变速控制技术受到广泛关注。变速控 Copyright © 2013 Hanspub 64 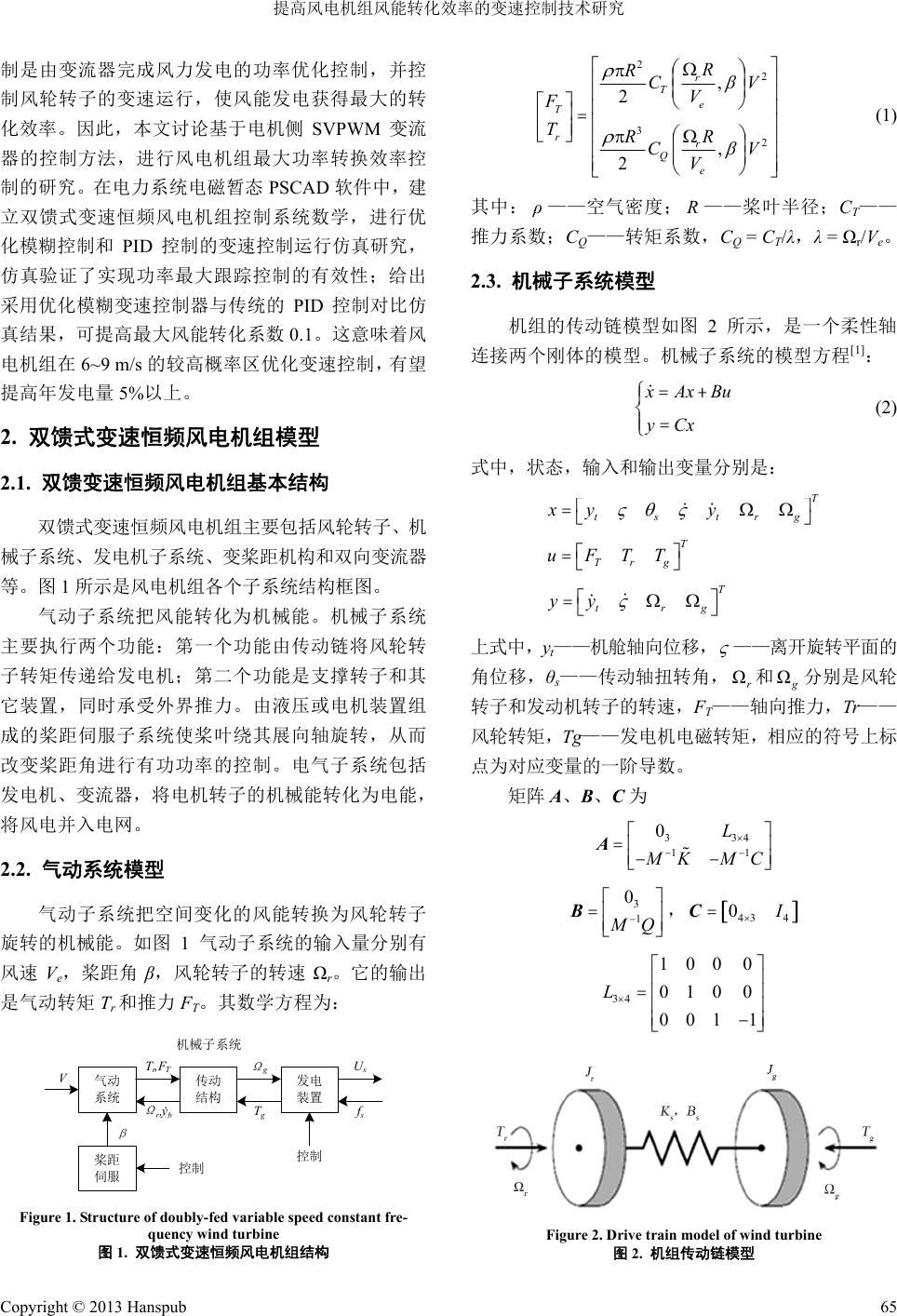 提高风电机组风能转化效率的变速控制技术研究 制是由变流器完成风力发电的功率优化控制,并控 制风轮转子的变速运行,使风能发电获得最大的转 化效率。因此,本文讨论基于电机侧 SVPWM 变流 器的控制方法,进行风电机组最大功率转换效率控 制的研究。在电力系统电磁暂态PSCAD 软件中,建 立双馈式变速恒频风电机组控制系统数学,进行优 化模糊控制和 PID 控制的变速控制运行仿真研究, 仿真验证了实现功率最大跟踪控制的有效性;给出 采用优化模糊变速控制器与传统的 PID 控制对比仿 真结果,可提高最大风能转化系数0.1。这意味着风 电机组在 6~9 m/s的 较高概率区优化变速控制,有望 提高年发电量 5%以上。 2. 双馈式变速恒频风电机组模型 2.1. 双馈变速恒频风电机组基本结构 双馈式变速恒频风电机组主要包括风轮转子、机 械子系统、发电机子系统、变桨距机构和双向变流器 等。图 1所示是风电机组各个子系统结构框图。 气动子系统把风能转化为机械能。机械子系统 主要执行两个功能:第一个功能由传动链将风轮转 子转矩传递给发电机;第二个功能是支撑转子和其 它装置,同时承受外界推力。由液压或电机装置组 成的桨距伺服子系统使桨叶绕其展向轴旋转,从而 改变桨距角进行有功功率的控制。电气子系统包括 发电机、变流器,将电机转子的机械能转化为电能, 将风电并入电网。 2.2. 气动系统模型 气动子系统把空间变化的风能转换为风轮转子 旋转的机械能。如图 1气动子系统的输入量分别有 风速 Ve,桨距角 β,风轮转子的转速Ωr。它的输出 是气动转矩 Tr和推力 FT。其数学方程为: 气动 系统 发电 装置 传动 结构 桨距 伺服 控制 控制 机械子系统 Tr,FTUs Ω g Tgfs V . Ω r,yb β Figure 1. Structure of doubly-fed variable speed constant fre- quency wind turbine 图1. 双馈式变速恒频风电机组结构 2 2 3 2 , 2 , 2 r T e T rr Q e R RCV V F TR RCV V rb rb éù æö êú ç÷ ç÷ êú éù èø êú êú = êú êú æö ëû êú ç÷ êú ç÷ êú èø ëû (1) 其中: ρ ——空气密度; ——桨叶半径;CT—— 推力系数;CQ——转矩系数,CQ = CT/λ,λ = Ωr/Ve。 R 2.3. 机械子系统模型 机组的传动链模型如图 2所示,是一个柔性轴 连接两个刚体的模型。机械子系统的模型方程[1]: x Ax Bu yCx ì=+ ï í ï= î (2) 式中,状态,输入和输出变量分别是: T tstrg T Trg T trg xy y uFTT yy éù = ëû éù =ëû éù =ëû 上式中,yt——机舱轴向位移, ——离开旋转平面的 角位移,θs——传动轴扭转角, Ω和Ω r g 分别是风轮 转子和发动机转子的转速,FT——轴向推力 ,Tr—— 风轮转矩,Tg——发电机电磁转矩,相应的符号上标 点为对应变量的一阶导数。 矩阵 A、B、C为 334 11 0L M KMC A ´ -- é ù êú = êú -- ëû 3 1 0 M Q B- é ù êú = êú ëû , [] 43 4 0 I C´ = 34 100 0 010 0 001 1 L´ éù êú êú = êú êú - ëû Figure 2. Drive train model of wind turbine 图2. 机组传动链模型 Copyright © 2013 Hanspub 65 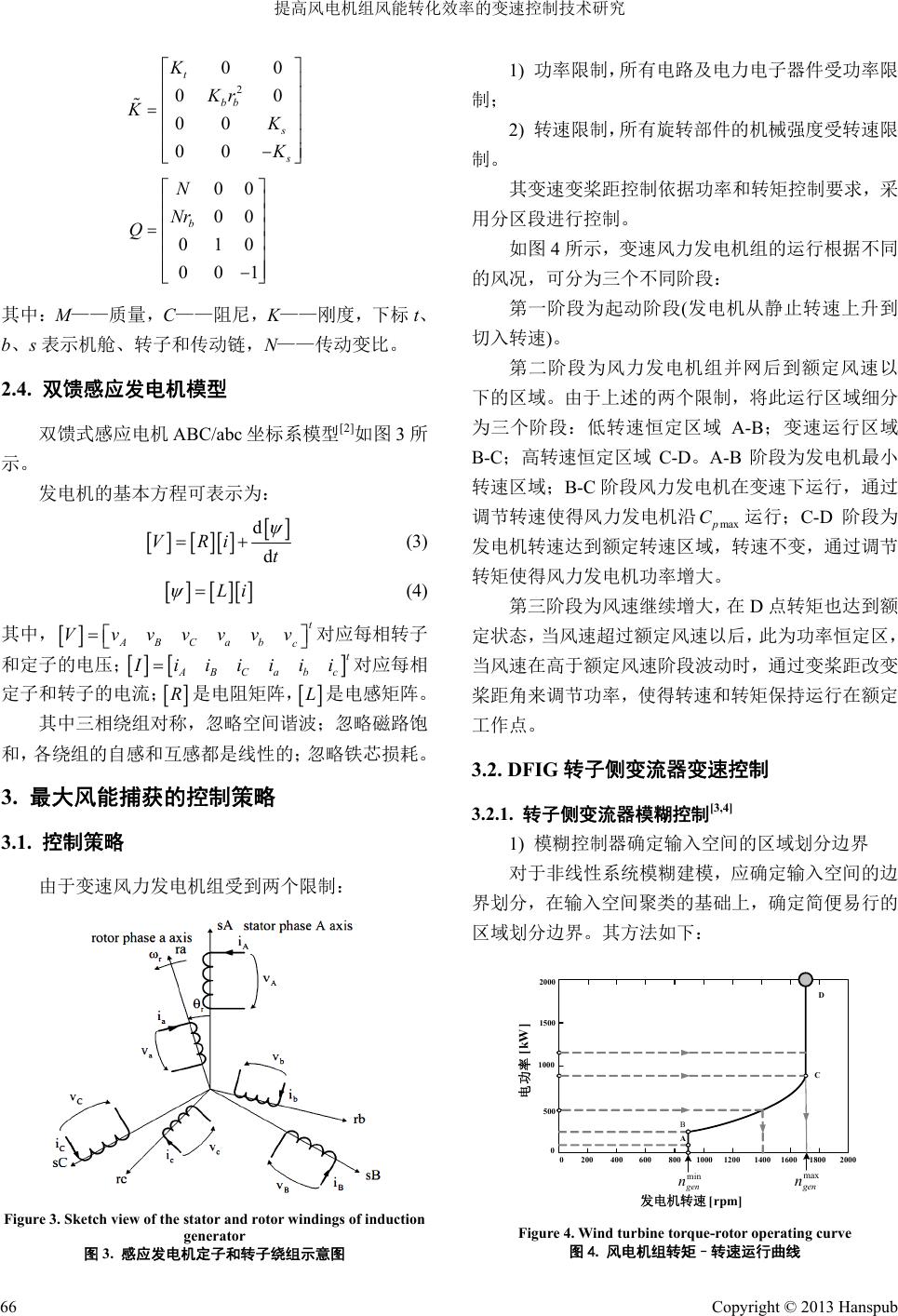 提高风电机组风能转化效率的变速控制技术研究 2 00 00 00 00 00 00 010 001 t bb s s b K Kr K K K N Nr Q éù êú êú êú = êú êú êú - ëû éù êú êú êú =êú êú êú - ëû 其中:M——质量,C——阻尼,K——刚度,下标t、 b、s表示机舱、转子和传动链,N——传动变比。 2.4. 双馈感应发电机模型 双馈式感应电机ABC/abc 坐标系模型[2]如图3所 示。 发电机的基本方程可表示为: d d VRit (3) Li (4) 其中, 对应每相转子 和定子的电压; t ABCabc V vvvvvv ABC ab t c I iiiiii 对应每相 定子和转子的电流; R是电阻矩阵, L是电感矩阵。 其中三相绕组对称,忽略空间谐波;忽略磁路饱 和,各绕组的自感和互感都是线性的;忽略铁芯损耗。 3. 最大风能捕获的控制策略 3.1. 控制策略 由于变速风力发电机组受到两个限制: Figure 3. Sketch view of the stator and rotor windings of induction generator 图3. 感应发电机定子和转子绕组示意图 1) 功率限制,所有电路及电力电子器件受功率限 制; 2) 转速限制,所有旋转部件的机械强度受转速限 制。 其变速变桨距控制依据功率和转矩控制要求,采 用分区段进行控制。 如图 4所示,变速风力发电机组的运行根据不同 的风况,可分为三个不同阶段: 第一阶段为起动阶段(发电机从静止转速上升到 切入转速)。 第二阶段为风力发电机组并网后到额定风速以 下的区域。由于上述的两个限制,将此运行区域细分 为三个阶段:低转速恒定区域A-B;变速运行区域 B-C;高转速恒定区域C-D。A-B 阶段为发电机最小 转速区域;B-C阶段风力发电机在变速下运行,通过 调节转速使得风力发电机沿 运行;C-D 阶段为 发电机转速达到额定转速区域,转速不变,通过调节 转矩使得风力发电机功率增大。 maxp C 第三阶段为风速继续增大,在 D点转矩也达到额 定状态,当风速超过额定风速以后,此为功率恒定区, 当风速在高于额定风速阶段波动时,通过变桨距改变 桨距角来调节功率,使得转速和转矩保持运行在额定 工作点。 3.2. DFIG转子侧变流器变速控制 3.2.1. 转子侧变流器模糊控制[3,4] 1) 模糊控制器确定输入空间的区域划分边界 对于非线性系统模糊建模,应确定输入空间的边 界划分,在输入空间聚类的基础上,确定简便易行的 区域划分边界。其方法如下: 800 160020040060010001200 14001800 20000 0 500 1000 1500 2000 min gen nmax gen n 发电机转速 [rpm] [kW] C A B 电功率 D Figure 4. Wind turbine torque-rotor operating curve 图4. 风电机组转矩–转速运行曲线 Copyright © 2013 Hanspub 66  提高风电机组风能转化效率的变速控制技术研究 Copyright © 2013 Hanspub 67 a) 固定聚类中心 vi(i = 1,2,…,q),并初始化半径 ri = 0 (i = 1,2,…,q); 控制较为困难,而模糊控制具有非线性和自适应控制 规律,对参数变化的线性或非线性对象有很强的鲁棒 性。它的控制规则用逻辑语言变量的形式定性表示, 建立被控对象的模糊模型,适用于不易获得精确数学 模型的风力发电机被控对象。 b) 对任意输入样本 () x t,确定 ()() min cj j x tv xtv-= -; c) if ()() cc x tv rk-> ,then ()() 1 cc rkxt v+=- ;if ()() cc x tv rk-£ ,then ( ) ( ) 1 cc rk rk+= 。 如图 5所示,为矢量控制系统中的模糊速度控制 器模块。该控制器根据速度误差信号更新输出DU, 以使实际速度ω(k)跟踪上给定速度ωref *。模糊控制器 有两个输入信号,即偏差 E和偏差变化量CE(与偏差 的倒数有关)。控制器输出转矩电流增量 Δi* qr,它是由 和积分产生实际的控制信号Δω(k),再乘Ku得到 转矩 电流给定量i* qr 作为矢量控制系统图 6的输入。 显然,区分边界是一个球面,其中心是聚类中心, 其半径由属于此区域的最远的样本决定,每个球面的 半径不一定相同。每个区域包含了所有属于自己的样 本,并且一定程度上含有邻近区域的样本。这样的区 分边界是相互重叠的、具有模糊性。 闭环偏差和偏差变化量通过除以各自的量化因 子,被转化为无量纲系数 Ke和Kce,为了增加控制的 灵敏度,Kce 进行了牛顿插值改进。输出控制信号由 Ku模糊量化因子和单位量相乘输出作为实际的控制 给定增量。用于转速模糊控制的规则矩阵如表 1所示。 2) 模糊控制器设计[5,6] 双馈感应发电机的动态d-q 模型是一个非线性、 多扰动、多变量、高阶次的时变系统,对其进行精确 转速模 糊控制 规则如 表1 误差论域限幅 误差变化量 论域限幅 )(k ref )(k pu )(ke )(kecc E E e K ec K )(k u K*irq Z 1 Z 1 *rqiΔ Figure 5. Fuzzy controller module in vector control system 图5. 矢量控制系统中的模糊控制器模块 * ref w r w 式(7) * rq i * rd ird i 模糊 模块 PI rdc v rqc v rq i * rd v * rq v/dq * r v * r v SVPWM s l DFIG /abc s i s i A i B i C i A BC /abc rd i r i 式(8)与 式(9) /dq r i r i s s r s l d dt s l w 式(10) ms i s l rq i r L r L s l w s l w rdc v s l wr L ms i rqc v r i ra i rb i rc i Z PI控制 Figure 6. Stator field oriented vector control diagram 图6. 定子磁场定向矢量控制框图  提高风电机组风能转化效率的变速控制技术研究 Table 1. Regular matrix used for rotor fuzzy control 表1. 用于转速模糊控制的规则矩阵 ce(pu) e(pu) NB NM NS Z PS PM PB NB NVB NVB NVBNB NM NS Z NM NVB NVB NB NM NS Z PS NS NVB NB NM NS Z PS PM Z NB NM NS Z PS PM PB PS NM NS Z PS PM PB PVB PM NS Z PS PM PB PVBPVB PB Z PS PM PB PVB PVBPVB 表中,相应符号的意义如下: NB——负大;NM——负中;NS——负小;NVB ——负非常小;Z——零;PVB——正非常小;PS—— 正小;PM——正中;PB——正大。 3.2.2. 定子磁场定向矢量控制 将同步旋转坐标系的 d轴和双馈电机定子磁场重 合,逆时针旋转 90˚的方向作为 q轴的方向,如图 7 所示。 双馈感应风力发电机的数学模型在定子磁场定 向同步旋转坐标系中的转子电压方程为: 2 d d d d rq m rqr rqrslmsr rd s rd rdr rdrslr rq iL uRiLiLi tL i uRiLLi t (5) 其中, 2 s rm sr LL L LL 为漏磁系数;ωsl 为转差角速度; ms i定义为励磁电流。 式(5) 是采用定子磁链定向的双馈风力发电机转 子电流矢量控制的原理基础,式中2 s lmms s Li L 为双馈 电机反电势所引起的扰动项, s lrrd Li 和 s lrrq Li - rd u 旋 转电势所引起的交叉耦合扰动项。当双馈电机转子电 流采用 PI调节器并且以 PI 调节器的输出来控制式(6) 中的转子电流动态项时,则转子电压 和的控制 方程如下: rq u () () 2 * * m I rqprqrqslmsr rd s I rdprdrdslr rq L K uK iiiLi sL K uK iiLi s ì æ Figure 7. Stator field oriented synchronism rotating coordinate system 图7. 定子磁场定向同步旋转坐标系 其中, p K 、 I K 为转子电流内环比例调节增益和积分 调节增益;i、分别为转子电流 q轴分量、d轴分 量的指令值。 * rq * rd i 定子磁场定向矢量控制框图如图6所示。 框图中所用的的式(7)、(8)、(9)、(10)为: () ** 2 2 3 sI rq P pmms LK iK s nLi æö ç÷ nn = -+ ç÷ èø - (7) s ss mr s ss mr LiLi LiL i ì=+ ï í ï=+ î (8) ö æö ï ç÷ ç÷ =+ -++ ç÷ ç÷ ïèø ï èø í ïæö ïç÷ =+ -- ç÷ ïèø î (6) 22 s ss =+,1 tan s s s - æö ç÷ = ç÷ èø (9) s mms Li = (10) 4. 空间电压矢量脉宽(SVPWM)[7] 典型的双馈风力发电机双向变流器的拓扑结构 如图8所示。 图中6个开关器选用IGBT,对其进行编号,上桥 臂从左到右为1、3、5,下桥臂对应为4、6、2、1、3、 5号IGBT的开关状态将决定变换器的输出,假设线电 压为 [ ] T ab bc ca VVV T abc SSS 、相电压为 [] 、开 关 变量为 [ 、直流侧供电电压为 。若以 为基准值,则逆变器的输出线电压和相电压如表2 所示。 T abc VVV dc V ] dc V 八种开关状态映射到同步旋转dq坐标系,并相应 得到六个相互间夹角为60˚的非零电压向量和两个位 于坐标原点的零电压向量,这八个向量称作基本空间 矢量,并将空间分成了六个扇区。如图9所示为 SVPWM电压空间矢量图。 Copyright © 2013 Hanspub 68 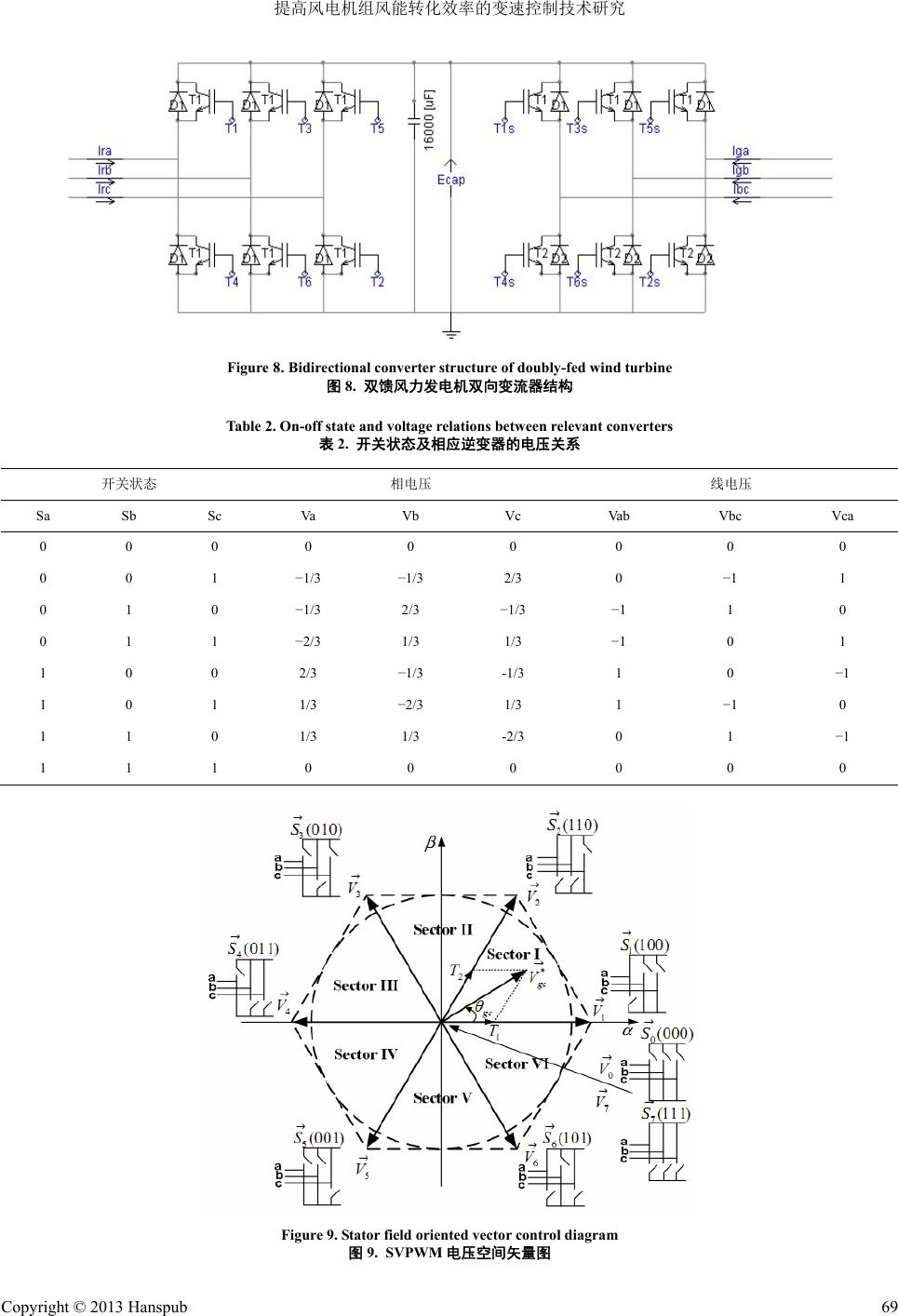 提高风电机组风能转化效率的变速控制技术研究 Figure 8. Bidirectional converter structure of doubly-fed wind turbine 图8. 双馈风力发电机双向变流器结构 Table 2. On-off state and voltage relations between relevant converters 表2. 开关状态及相应逆变器的电压关系 开关状态 相电压 线电压 Sa Sb Sc Va Vb Vc Vab Vbc Vca 0 0 0 0 0 0 0 0 0 0 0 1 −1/3 −1/3 2/3 0 −1 1 0 1 0 −1/3 2/3 −1/3 −1 1 0 0 1 1 −2/3 1/3 1/3 −1 0 1 1 0 0 2/3 −1/3 -1/3 1 0 −1 1 0 1 1/3 −2/3 1/3 1 −1 0 1 1 0 1/3 1/3 -2/3 0 1 −1 1 1 1 0 0 0 0 0 0 Figure 9. Stator field oriented vector control diagram 图9. SVPWM电压空间矢量图 Copyright © 2013 Hanspub 69  提高风电机组风能转化效率的变速控制技术研究 5. 基于转子侧模糊控制变流器的双馈风力 发电机组的仿真 仿真用 2.0 双馈式风力发电机组设计参数:叶轮 半径:40 m;空气密度: 3 1.225 kgm;齿轮箱速比: 84.15:1;最佳叶尖速比为:7.5。 双馈感应电机的参数如表 3所示。 电网侧仿真参数:电网线电压有效值 kV,频率 Hz,直流电容 C = 16,000 μF, 直流电容给定电压标幺值参考电压 V。 0.69V=50f= *1200 dc U= 6. 仿真结果 图10 给出了采用优化模糊控制和 PID控制对比 仿真的变速最佳功率跟踪控制实验结果。其中图(a)~ 图(e)分别为仿真风速、风能利用系数、输出功率、参 考转速与测量转速、转子 d轴和 q轴的电流。 图左边是优化模糊变速控制输出响应。图右是采 用PI 控制下的仿真响应。分析如下: 1) 图(b) 显示:采用模糊变速 控制方法仿真 的风 能利用系数稳定在 0.405;而未采用这样的仿真结果 为0.31; 2) 图(d) 中看出:采用模糊变 速控制方法的 仿真 对于转速的参考转速的跟踪比PID 跟踪控制的更准、 响应更快; 3) 图(e)表明:采用模糊变速控制方法较PID 跟 踪控制的转子电流的波动较大,图(c)表明由于电流的 控制作用换来了功率输出的增加。 Table 3. Simulation parameters of doubly-fed induction machine 表3. 双馈感应电机仿真参数 额定功率 2 MW 额定电压 0.69 kV 定转子比 0.4333 角动量 1.8293 p.u. 机械阻尼 0.02 p.u. 定子电阻 0.0183 p.u. 转子电阻 0.0205 p.u. 定子漏感 0.2621 p.u. 转子漏感 0.3152 p.u. 互感 5.572 p.u. (a) (b) (c) (d) (e) Figure 10. Simulation results (a) Wind speed; (b) Wind turbine power coefficient; (c) Wind turbine output power; (d) Reference rotor speed and measured rotor speed; (e) Rotor current of axis d and axis q 图10. 仿真结果(a) 仿真风速;(b) 风电机组风能利用系数;(c) 风电 机组输出功率;(d) 参考转 速与测量转速;(e) 转子 d轴和 q轴电流 Copyright © 2013 Hanspub 70  提高风电机组风能转化效率的变速控制技术研究 7. 结论 仿真试验表明,采用优化模糊变速控制,可实现 最大功率跟踪控制;控制风轮转速最佳尖速比运行, 从而使双馈式变速恒频风电机组达到最大风能转化 系数 0.41,通过改进控制算法使得风能转化系数平均 增加 0.1。验证了优化变速控制算法可提高风电机组 发电效率的可行性。 参考文献 (References) [1] 邓英. 风力发电 机组设计与技术[M]. 北京: 化学工业出版社, 2011. [2] C. Goldemberg, A. De Arruda Penteado, et al. Improvements on the inductance matrix inversion simplifying the use of the ABC/ abc induction machine model. Proceedings of IEMD’99, 1999: 422-424. [3] 任永峰, 安中全等. 双馈式风力发电机组柔性并网运行与控 制[M]. 北京: 机械工业出版社, 2011. [4] 姚俊, 廖勇. 基 于全模糊控制器的交流励磁发电机 励磁控制 系统研究[J]. 中国电机工程学报, 2007, 27(33): 36-41. [5] 徐大平, 肖运启, 吕跃钢. 基于模糊逻辑的双馈型风电机组 最优功率控制[J]. 太阳能学报, 2008, 6: 644-651. [6] 鲍薇, 尹忠东, 任智慧. 变速恒频双馈风力发电机组交流励 磁控制系统研究[J]. 电气传动, 2010, 40(1): 27-32. [7] P. Alkorta, O. Baram Bones, A. J. Garrido, et al. SVPWM vari- able structure control of induction motor drives. IEEE Trans In- dustrial Electronics, 2007, 40(7): 1195-1200. Copyright © 2013 Hanspub 71 |