 Sustainable Energy 可持续能源, 2013, 3, 65-70 http://dx.doi.org/10.12677/se.2013.33010 Published Online June 2013 (http://www.hanspub.org/journal/se.html) Maximum Power Point Tracking Control Based on Improved Hill Climbing Method Chong Yang, Keqing Qu Shanghai University of Electric Power, Shanghai Email: hellochong@163.com, kqqu@shiep.edu.cn Received: Apr. 14th, 2013; revised: Apr. 18th, 2013; accepted: May 11th, 2013 Copyright © 2013 Chong Yang, Keqing Qu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract: To achieve the wind energy maximum power point tracking control, this paper makes an improvement based on the traditional hill climbing method. A 1/2 variable step hill climbing method is proposed, which can achieve the maximum power point tracking rapidly and steadily, and the output characteristics and efficiency of the system are improved. The simulation results show that this method can improve the speed and stability of the maximum power point tracking of wind energy. Keywords: Wind Energy; Maximum Power Point Tracking; Hill Climbing Method; Variable Step 基于改进爬山法的最大功率跟踪控制研究 杨 冲,屈克庆 上海电力学院,上海 Email: hellochong@163.com, kqqu@shiep.edu.cn 收稿日期:2013 年4月14 日;修回日期:2013年4月18日;录用日期:2013 年5月11 日 摘 要:为实现风能的最大功率跟踪控制,本文在传统爬山法的基础之上进行了改进,提出了一种1/2 变步长 的爬山法,该方法能够快速而准确的实现最大功率追踪,有效的改善了系统的输出特性,提高了系统输出效率。 仿真结果表明了该方法能够提高风能最大功率跟踪的快速性和稳定性。 关键词:风能;最大功率跟踪;爬山法;变步长 1. 引言 近些年来,随着能源问题的日益严峻,环境污染 日趋严重,给人们的生存和发展带来了很多问题。为 此,风能,太阳能等新型可再生能源便得到了普遍的 重视。风能作为一种清洁、无污染、可再生的绿色能 源,拥有着广泛的发展前景,也越来越受到人们的欢 迎。但是,由于风的随机性和不确定性,如何控制风 电系统以便从风力资源中获得最大电能,实现最大功 率输出,已成为人们面临的一个重大难题[1]。 为了最大限度的使风力发电机组捕获风能,实现 最大功率跟踪控制。目前常用的控制策略大体可分为 两类:反馈控制法和爬山搜索法。反馈控制法是通过 测量风速或者转速,根据最大功率曲线得到一个最大 转速的给定值,然后与实测转速进行比较,来调整发 电机转速使其始终运行于该最佳转速,从而实现最大 风能跟踪。此方法需要得知风力机的最佳转速曲线, 而且需要测量风速或转速,增加了系统的成本。而爬 山法控制是通过不停扰动转速,观察功率的变化情况 来改变下一次扰动方向,使输出功率增大至最大功 Copyright © 2013 Hanspub 65 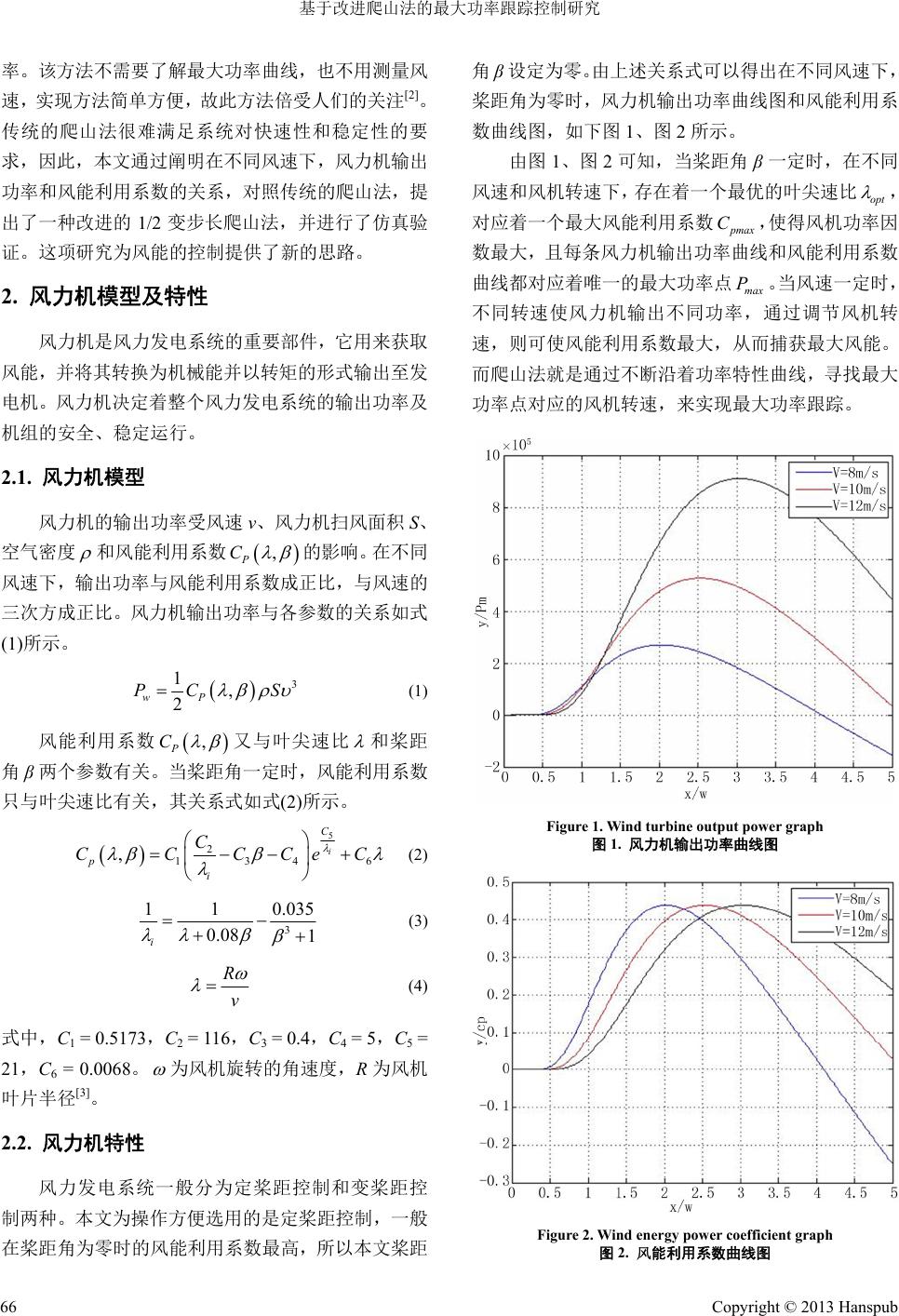 基于改进爬山法的最大功率跟踪控制研究 率。该方法不需要了解最大功率曲线,也不用测量风 速,实现方法简单方便,故此方法倍受人们的关注[2]。 传统的爬山法很难满足系统对快速性和稳定性的要 求,因此,本文通过阐明在不同风速下,风力机输出 功率和风能利用系数的关系,对照传统的爬山法,提 出了一种改进的 1/2 变步长爬山法,并进行了仿真验 证。这项研究为风能的控制提供了新的思路。 2. 风力机模型及特性 风力机是风力发电系统的重要部件,它用来获取 风能,并将其转换为机械能并以转矩的形式输出至发 电机。风力机决定着整个风力发电系统的输出功率及 机组的安全、稳定运行。 2.1. 风力机模型 风力机的输出功率受风速v、风力机扫风面积S、 空气密度 和风能利用系数 , P C 的影响。在不同 风速下,输出功率与风能利用系数成正比,与风速的 三次方成正比。风力机输出功率与各参数的关系如式 (1)所示。 3 1, 2 wP PC S (1) 风能利用系数 , P C 又与叶尖速比 和桨距 角β两个参数有关。当桨距角一定时,风能利用系数 只与叶尖速比有关,其关系式如式(2)所示。 5 2 134 ,i C p i C CCCCe 6 C (2) 3 11 0.035 0.08 1 i (3) R v (4) 式中,C1 = 0.5173,C2 = 116,C3 = 0.4,C4 = 5,C5 = 21,C6 = 0.0068。 为风机旋转的角速度,R为风机 叶片半径[3]。 2.2. 风力机特性 风力发电系统一般分为定桨距控制和变桨距控 制两种。本文为操作方便选用的是定桨距控制,一般 在桨距角为零时的风能利用系数最高,所以本文桨距 角β设定为零。由上述关系式可以得出在不同风速下, 桨距角为零时,风力机输出功率曲线图和风能利用系 数曲线图,如下图1、图 2所示。 由图 1、图 2可知,当桨距角 β一定时,在不同 风速和风机转速下,存在着一个最优的叶尖速比 opt , 对应着一个最大风能利用系数 p max C max P ,使得风机功率因 数最大,且每条风力机输出功率曲线和风能利用系数 曲线都对应着唯一的最大功率点 。当风速一定时, 不同转速使风力机输出不同功率,通过调节风机转 速,则可使风能利用系数最大,从而捕获最大风能。 而爬山法就是通过不断沿着功率特性曲线,寻找最大 功率点对应的风机转速,来实现最大功率跟踪。 Figure 1. Wind turbine output power graph 图1. 风力机输出功率曲线图 Figure 2. Wind energy power coefficient graph 图2. 风能利用系数曲线图 Copyright © 2013 Hanspub 66  基于改进爬山法的最大功率跟踪控制研究 3. 传统爬山法 传统爬山法工作原理是给定一个固定扰动步长 ,风机开始从初始点以给定步长 一步步进行跟 踪,然后观测功率 P 变化。若风机功率 P 增加,则 风机转速扰动方向不变,若风机功率 P 小,则风机转 速扰动方向反向,然后继续跟踪。最后风机转速便在 最大功率点 附近左右不断反复跟踪达到平衡。 max P 传统爬山法的原理图如图3所示[4]。 在图 3中,由风力机发电系统的转子旋转角速度 与转子输出功率 P 的特性曲线图,可知每一条特性 曲线都对应着一个最大功率点ma P若在某个恒定风 速v下,假定起始点为A,则风力机将沿功率特性曲 线1以给定步长 x。 断进行跟踪,然后观测功率 P不 变化。若风机功率 P 增加,则风机转速扰动方向不变; 若风机功率 P 减小时,则风机转速扰动方向反向,然 后继续跟踪,直到找到最大功率点1max P时, 便在此 点附近反复跟踪达到平衡;若风速在B点时突然变大, 则风力机将立刻从功率特性曲线 1跳到功率特性曲线 2的C点上,然后,继续最大功率跟踪,直到到达功 率特性曲线2的最大功率点 2max P点时 便在此点附 近不断反复跟踪达到平衡[5]。若初始点为D,其原理 也一样。 它 它, 传统爬山法最大功率跟踪的流程图如图 4所示 [6]。 传统爬山法缺点就是由于采用固定步长扰动导 致了风机转速的较大波动,并且对快速变化的风速追 踪速度较慢,风机系统输出效率低;加之,固定转速 扰动产生的阶梯状变化的风机转速指令值使得风机 的转速也不平稳。 4. 改进爬山法 为了快速而稳定的实现最大功率跟踪,本文提出 1/2 变步长扰动爬山法。其工作原理是先在初始状态 为风力机系统设定一个较大固定扰动步长 ,然后 观测风速 v是否变化,若变化,则恢复起始步长 ;若不变,则使风力机快速跟踪最大功率点 ,然后观测功率 0 max P P 变化。若风机功率 P 增加, 则风机转速扰动步长 和方向都不变;若风机功率 P 减小时,则风机转速扰动步长减半即 0.5 且方 向反向,然后继续跟踪。如此不断循环反复,最后风 Figure 3. The principle of traditional hill climbing method graph 图3. 传统爬山法原理图 Figure 4. Traditional hill climbing method flowing chart 图4. 传统爬山法流程图 机转速便在最大功率点 附近反复跟踪达到平衡。 max P 仍如在图 3中,假定初始点为 A,此时风速 v也 恒定,风力机开始将沿功率特性曲线1以一个固定大 步长 不断进行跟踪,然后观测功率 P 变化。若风 机功率 P 增加,则风机转速扰动步长 和方向都不 变,若风机功率 P 减小时,则风机转速扰动步长减半 Copyright © 2013 Hanspub 67 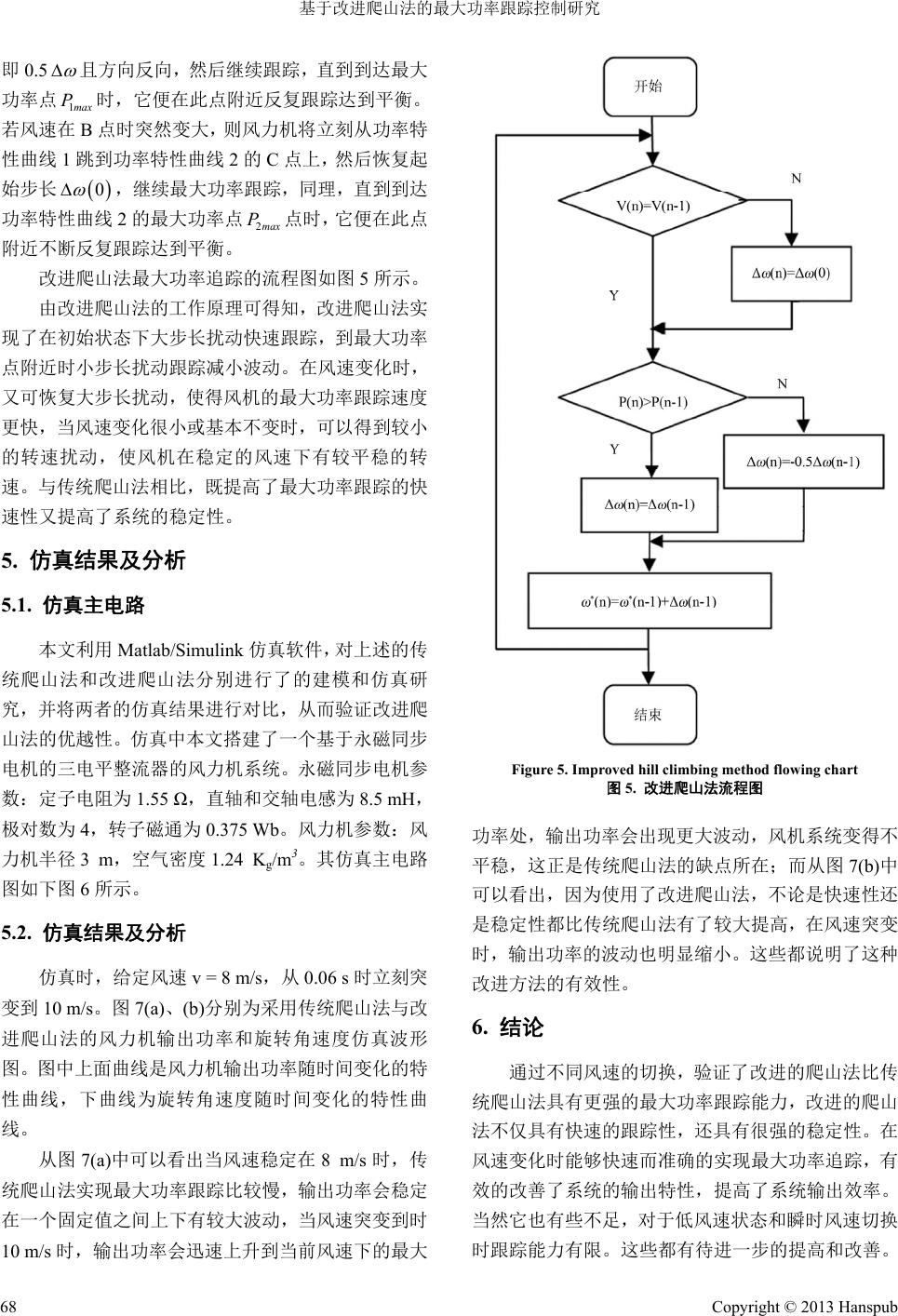 基于改进爬山法的最大功率跟踪控制研究 即0.5 1ma P 且方向反向,然后继续跟踪,直到到达最大 功率点 时,它便在此点附近反复跟踪达到平衡。 若风速在B点时突然变大,则风力机将立刻从功率特 性曲线 1跳到功率特性曲线2的C点上,然后恢复起 始步长 ,继续最大功率跟踪,同理,直到到达 功率特性曲线2的最大功率点 点时,它便在此点 附近不断反复跟踪达到平衡。 x 0 2max P 改进爬山法最大功率追踪的流程图如图5所示。 由改进爬山法的工作原理可得知,改进爬山法实 现了在初始状态下大步长扰动快速跟踪,到最大功率 点附近时小步长扰动跟踪减小波动。在风速变化时, 又可恢复大步长扰动,使得风机的最大功率跟踪速度 更快,当风速变化很小或基本不变时,可以得到较小 的转速扰动,使风机在稳定的风速下有较平稳的转 速。与传统爬山法相比,既提高了最大功率跟踪的快 速性又提高了系统的稳定性。 5. 仿真结果及分析 5.1. 仿真主电路 本文利用 Matlab/Simulink 仿真软件,对上述的传 统爬山法和改进爬山法分别进行了的建模和仿真研 究,并将两者的仿真结果进行对比,从而验证改进爬 山法的优越性。仿真中本文搭建了一个基于永磁同步 电机的三电平整流器的风力机系统。永磁同步电机参 数:定子电阻为1.55 Ω,直轴和交轴电感为8.5 mH, 极对数为 4,转子磁通为0.375 Wb。风力机参数:风 力机半径 3 m,空气密度1.24 Kg/m3。其仿真主电路 图如下图6所示。 5.2. 仿真结果及分析 仿真时,给定风速v = 8 m/s,从0.06 s 时立刻突 变到 10 m/s。图7(a)、(b)分别为采用传统爬山法与改 进爬山法的风力机输出功率和旋转角速度仿真波形 图。图中上面曲线是风力机输出功率随时间变化的特 性曲线,下曲线为旋转角速度随时间变化的特性曲 线。 从图 7(a)中可以看出当风速稳定在8 m/s时,传 统爬山法实现最大功率跟踪比较慢,输出功率会稳定 在一个固定值之间上下有较大波动,当风速突变到时 10 m/s 时,输出功率会迅速上升到当前风速下的最大 Figure 5. Improved hill climbing method flowing chart 图5. 改进爬山法流程图 功率处,输出功率会出现更大波动,风机系统变得不 平稳,这正是传统爬山法的缺点所在;而从图 7(b)中 可以看出,因为使用了改进爬山法,不论是快速性还 是稳定性都比传统爬山法有了较大提高,在风速突变 时,输出功率的波动也明显缩小。这些都说明了这种 改进方法的有效性。 6. 结论 通过不同风速的切换,验证了改进的爬山法比传 统爬山法具有更强的最大功率跟踪能力,改进的爬山 法不仅具有快速的跟踪性,还具有很强的稳定性。在 风速变化时能够快速而准确的实现最大功率追踪,有 效的改善了系统的输出特性,提高了系统输出效率。 当然它也有些不足,对于低风速状态和瞬时风速切换 时跟踪能力有限。这些都有待进一步的提高和改善。 Copyright © 2013 Hanspub 68 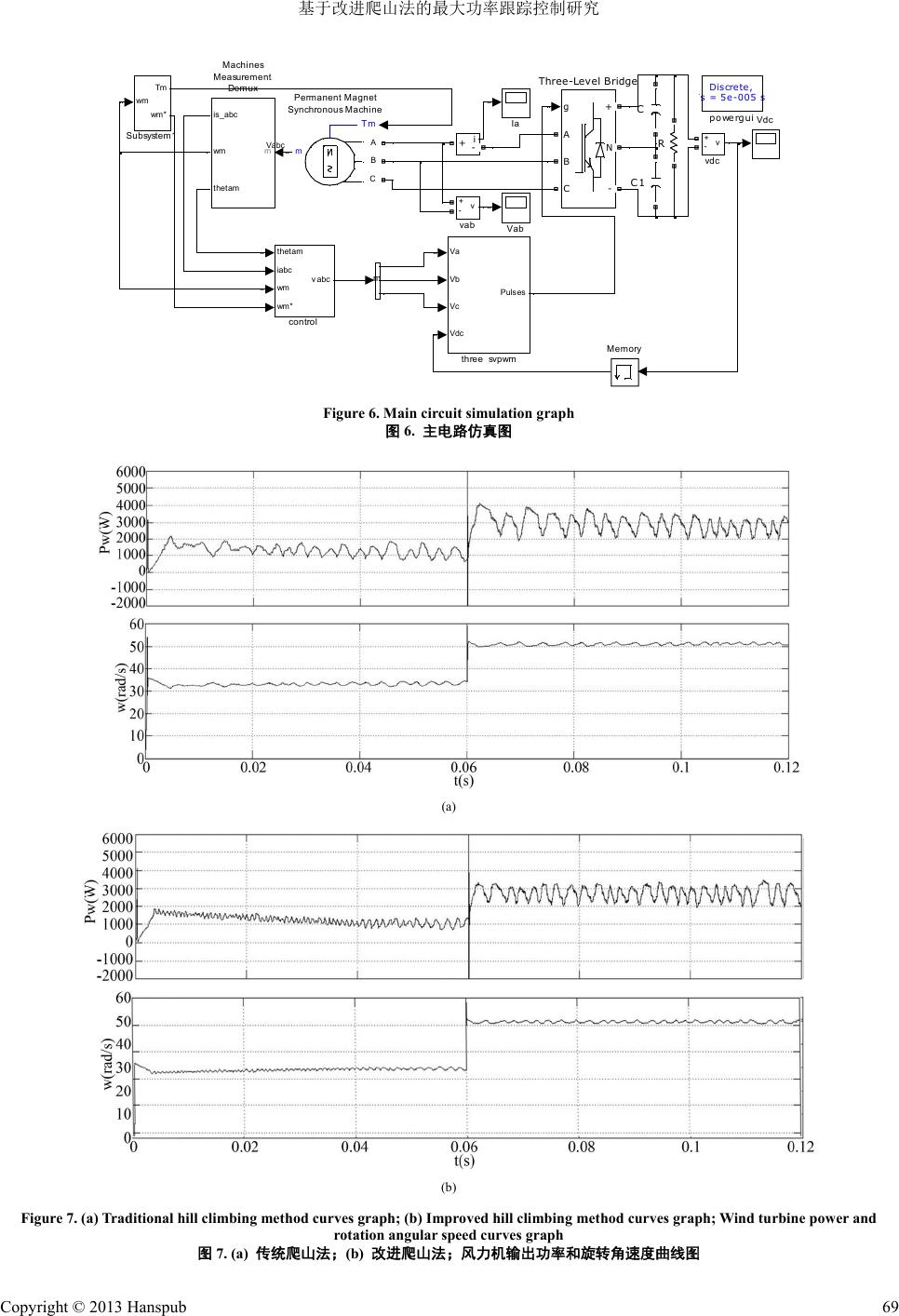 基于改进爬山法的最大功率跟踪控制研究 Copyright © 2013 Hanspub 69 v + - vd c v + - vab Dis crete , T s = 5e-005 s powergui thetam iabc wm wm* vabc control Vdc Vab g A B C + N - Three-Level Bridge wm Tm wm* Subsystem1 R mA B C Tm Permanent Magnet Synchronous Machine Memory m is_abc wm thetam Machines Measurement Demux Ia e m C1 C Va Vb Vc Vdc Pulses three svpwm i +- Vabc Figure 6. Main circuit simulation graph 图6. 主电路仿真图 (a) (b) Figure 7. (a) Traditional hill climbing method curves graph; (b) Improved hill climbing method curves graph; Wind turbine power and rotation angular speed curves graph 图7. (a) 传统爬山法;(b) 改进爬山法;风力机输出功率和旋转角速度曲线图 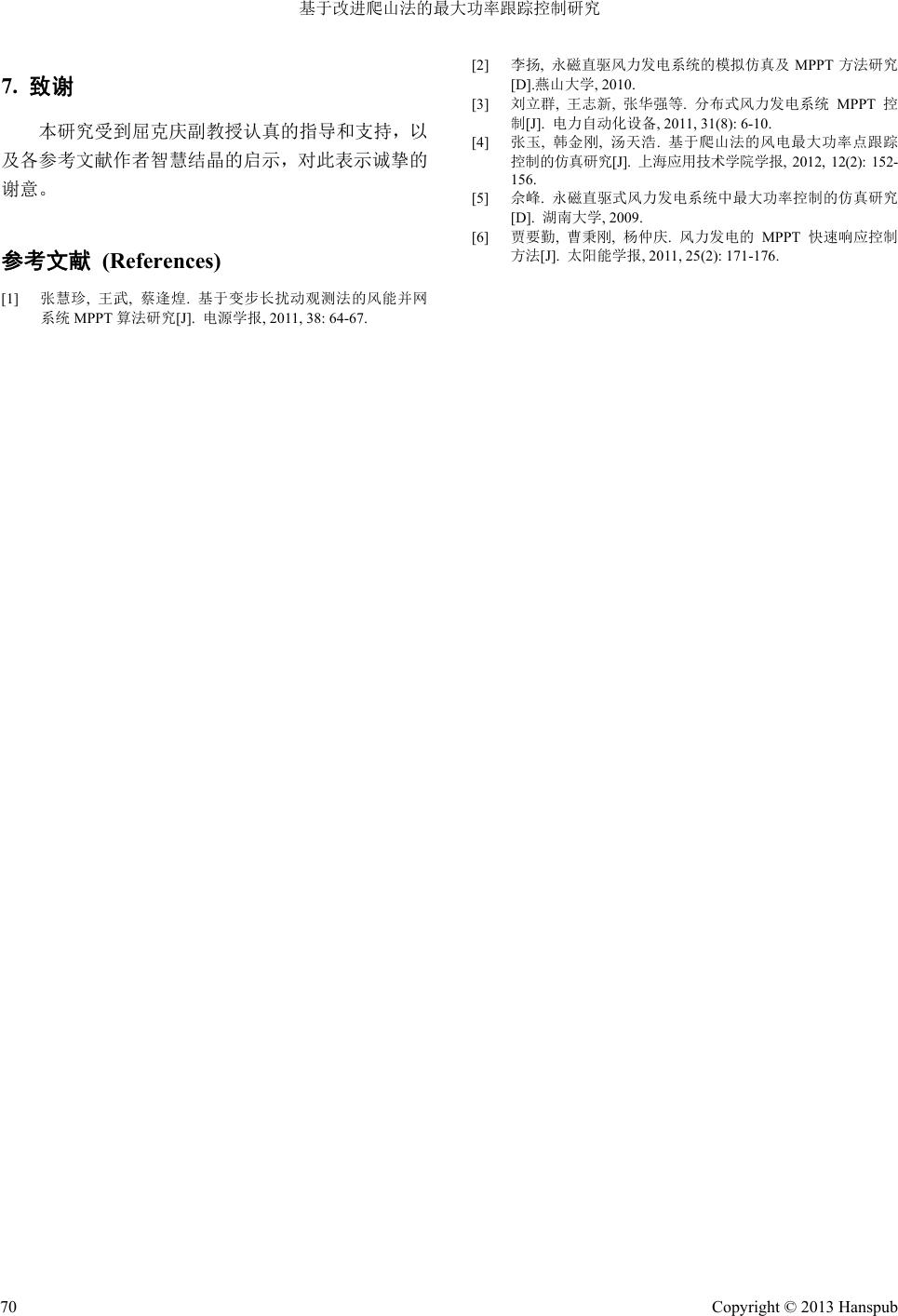 基于改进爬山法的最大功率跟踪控制研究 7. 致谢 本研究受到屈克庆副教授认真的指导和支持,以 及各参考文献作者智慧结晶的启示,对此表示诚挚的 谢意。 参考文献 (References) [1] 张慧珍, 王武, 蔡逢煌. 基于变步长扰动观测法的风能并网 系统 MPPT 算法研究[J]. 电源学报, 2011, 38: 64-67. [2] 李扬, 永磁直驱风力发电系统的模拟仿真及 MPPT 方法研究 [D].燕山大学, 2010. [3] 刘立群, 王志新, 张华强等. 分布式风力发电系统 MPPT 控 制[J]. 电力自动化设备, 2011, 31(8): 6-10. [4] 张玉, 韩金刚, 汤天浩. 基于爬山法的风电最大功率点跟踪 控制的仿真研究[J]. 上海应用技术学院学报, 2012, 12(2): 152- 156. [5] 佘峰. 永磁直驱式风力发电系统中最大功率控制的仿真研究 [D]. 湖南大学, 2009. [6] 贾要勤, 曹秉刚, 杨仲庆. 风力发电的 MPPT 快速响应控制 方法[J]. 太阳能学报, 2011, 25(2): 171-176. Copyright © 2013 Hanspub 70 |