Advances in Applied Mathematics
Vol.05 No.02(2016), Article ID:17570,7
pages
10.12677/AAM.2016.52032
Stability Analysis on the Dynamic Model of Fish Swarm Amensalism
Huanhuan Xiong, Binbin Wang, Hailiang Zhang*
Department of Mathematics, Zhejiang Ocean University, Zhoushan Zhejiang

Received: Apr. 29th, 2016; accepted: May 15th, 2016; published: May 18th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
In the paper, we build the amensalism dynamic model for two fish swarms, discuss the stability of the model using the characteristic theory and draw up corresponding phase trajectories. Secondly, the biological significance of each singularity is described, and the uniqueness of the system stable points is obtained also by qualitative analysis. Finally, the stable points are numerically simulated.
Keywords:Stability, Dynamic Model, Amensalism, Phase Trajectory, Numerical Simulation

鱼群偏害共生动力学模型的稳定性分析
熊焕焕,王斌斌,张海亮*
浙江海洋大学数学系,浙江 舟山

收稿日期:2016年4月29日;录用日期:2016年5月15日;发布日期:2016年5月18日

摘 要
本文建立了两种鱼群的偏害共生动力学模型,用特征理论讨论了奇点的稳定性,并画出相应的相轨线。论文也阐述了每个奇点的生物意义,并通过定性分析得出该系统中必有唯一稳定点存在。最后对稳定点进行了数值模拟。
关键词 :稳定性,动力学模型,偏害共生,相轨线,数值模拟

1. 引言
随着海洋事业不断发展,海洋捕捞者迫切希望掌握鱼群的变化规律,从而获得最大经济效益。通过建立鱼群动力学模型来分析鱼群数量随时间的演化规律,是一种非常有效的方法。
数学工作者对种群互惠共生和相互竞争 [1] - [3] 的动力学模型进行过大量的研究,并取得了显著成果。在这两种极端关系之间,还存在更多的过渡性关系。如鱼群偏害共生关系,即对一方鱼群有害而对另一方鱼群无利弊影响的共生类型。这种关系在鱼群中十分常见,但研究成果较少。本文的目的是建立两种鱼类偏害共生的动力学模型并进行稳定性分析,以此来探讨鱼群的数量变化规律。
2. 偏害共生鱼群模型的建立
20世纪40年代,Lotka和Volterra奠定了种间竞争关系的理论基础,他们所提出的种间竞争方程极大的推动了种群动力学的发展。下面我们通过对著名的Logistic模型增加偏害作用项,建立与Lotka-Volterra类似的偏害共生鱼群的动力学模型。
我们只考虑两种鱼群问题. 设两种鱼群在海洋中均匀分布,不存在阶段结构和自食现象,并且当它们各自在海洋中生存时,鱼群数量服从Logistic规律。记 ,
, 分别代表第1类和第2类鱼群的内禀增长率(出生率减去死亡率),
分别代表第1类和第2类鱼群的内禀增长率(出生率减去死亡率), ,
, 分别代表这两种鱼群单独生活在海洋中的最大环境容纳量,
分别代表这两种鱼群单独生活在海洋中的最大环境容纳量, 表示第
表示第 类鱼群在时刻
类鱼群在时刻 的数量,其中
的数量,其中 。
。
进一步假设第2类鱼群对第1类鱼群有抑制其生长的作用,且第1类鱼群对第2类鱼群无利弊影响,即在经典Logistic模型基础上增加偏害共生项,可得如下的鱼群偏害共生动力学模型:
 (1)
(1)
其中 ,
, ,其它参数都为正数,项
,其它参数都为正数,项 ,
, 分别表示第一类鱼群和第二类鱼群已经利用的空间,
分别表示第一类鱼群和第二类鱼群已经利用的空间, ,
, 分别表示这两种鱼群未利用的空间,
分别表示这两种鱼群未利用的空间, 代表第二类鱼群对第一类鱼群的抑制系数。
代表第二类鱼群对第一类鱼群的抑制系数。
3. 动力系统模型求解
类似文献 [4] ,可得动力系统的平衡态方程为:
 (2)
(2)
解方程组(2)求得鱼群的4个平衡点分别如下:
 ,
, ,
, ,
,
下面讨论4个平衡态点的稳定性。对于零点 ,方程组所对应的近似线性系统为:
,方程组所对应的近似线性系统为:
 (3)
(3)
系统(3)以 为初值的解为:
为初值的解为:
其中 ,
, 。从而
。从而
 。
。
随着时间的推移,函数 。显然,无论
。显然,无论 取得如何的小,当
取得如何的小,当 足够大时,无法确保
足够大时,无法确保 小于预先给定的正数
小于预先给定的正数 ,所以零解
,所以零解 是不稳定的。从相轨线图1中也可以观察到从点
是不稳定的。从相轨线图1中也可以观察到从点 出发的曲线可趋向于任何方向,说明该点是不稳定的。
出发的曲线可趋向于任何方向,说明该点是不稳定的。
对于另外3个奇点,我们采用特征理论讨论他们的稳定性。由(2)式可得下列方程组
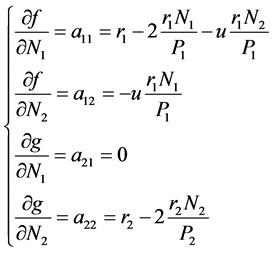 (4)
(4)
对于平衡点 ,相应的有
,相应的有
 ,
, ,
, ,
,
它的特征方程为
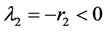
由于特征根 ,
, ,所以点
,所以点 为鞍点。从相轨线图2中可以看到各条曲线逐渐远离点
为鞍点。从相轨线图2中可以看到各条曲线逐渐远离点 ,也就是说该点不稳定。
,也就是说该点不稳定。
对于平衡点 有
有
 ,
, ,
, ,
,
它所对应的特征根为 ,
, 。
。
当 时,有
时,有 ,
, ,故该奇点为鞍点。从相轨线图3中可以明显看到曲线逐渐远离点
,故该奇点为鞍点。从相轨线图3中可以明显看到曲线逐渐远离点 ,说明该点是不稳定的。
,说明该点是不稳定的。
当 时,由于
时,由于 ,
, ,从而该奇点为稳定结点。从相轨线图4中看到各条曲线都向点
,从而该奇点为稳定结点。从相轨线图4中看到各条曲线都向点 汇聚,也就是说随时间的变化鱼群数量最终将稳定在点
汇聚,也就是说随时间的变化鱼群数量最终将稳定在点 。
。
最后讨论平衡点 的稳定性。由于
的稳定性。由于
 ,
, ,
, ,
,
从而该点所对应的特征根为 ,
, 。
。

Figure 1. Curve: The point A(0,0) of phase track chart
图1. 点A(0,0)的相轨线图
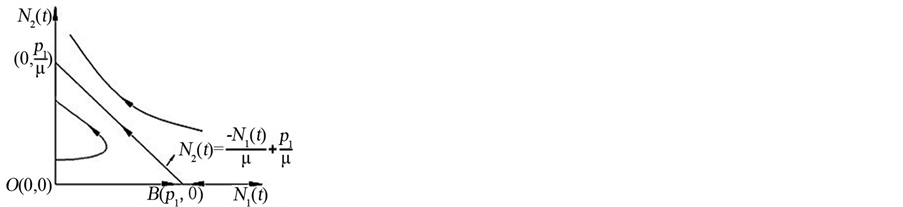
Figure 2. Curve: The point B(P1,0) of phase track chart
图2. 点B(P1,0)的相轨线图
Figure 3. Curve: The point C(0,P2) of phase track chart
图3. 点C(0,P2)的相轨线图
当 时,
时, ,
, ,说明该奇点为鞍点。从相轨线图5中可以看到点
,说明该奇点为鞍点。从相轨线图5中可以看到点 位于第二象限,而第一类鱼群的数量不可能为负值,所以该点没有现实意义,也蕴含着点的不稳定。
位于第二象限,而第一类鱼群的数量不可能为负值,所以该点没有现实意义,也蕴含着点的不稳定。
当 ,
, 时,
时, ,
, ,该奇点为稳定结点。从相轨线图6中可以清楚地观察到两条相轨线
,该奇点为稳定结点。从相轨线图6中可以清楚地观察到两条相轨线 ,
, 相交于点
相交于点 ,且各条曲线都向该点汇聚,也就是说随时间的变化鱼群数量终将稳定在点
,且各条曲线都向该点汇聚,也就是说随时间的变化鱼群数量终将稳定在点 。
。
4. 模型分析
上面分析了4个奇点的稳定性,据此我们可以阐释它们的生物意义。
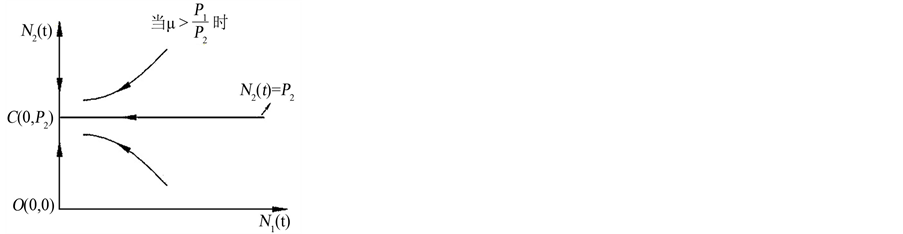
Figure 4. Curve: The point C(0,P2) of phase track chart
图4. 点C(0,P2)的相轨线图
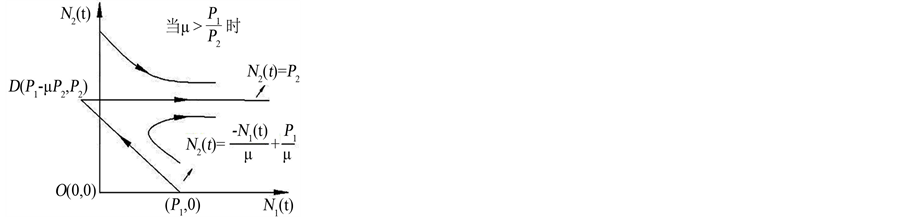
Figure 5. Curve: The point D(P − μP2,P2) of phase track chart
图5. 点D(P − μP2,P2)的相轨线图
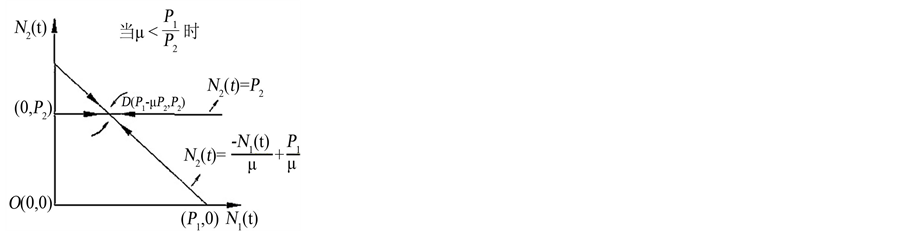
Figure 6. Curve: The point D(P − μP2,P2) of phase track chart
图6. 点D(P − μP2,P2)的相轨线图
(1) 平衡点 表示两种鱼群的数量都为非常小时,无法确保两种鱼群随时间的变化将会趋向于哪个方向,所以该点是不稳定的。
表示两种鱼群的数量都为非常小时,无法确保两种鱼群随时间的变化将会趋向于哪个方向,所以该点是不稳定的。
(2) 平衡点 表示第1类鱼群数量已经达到最大环境容纳量
表示第1类鱼群数量已经达到最大环境容纳量 ,而第2类鱼群数量非常小。因为第2类鱼群对第1类鱼群有抑制作用,随着时间的变化,第2类鱼群的数量会持续增加而第1类鱼群数量将急剧减少,鱼群数量会发生显著变化,即该点也是不稳定的。
,而第2类鱼群数量非常小。因为第2类鱼群对第1类鱼群有抑制作用,随着时间的变化,第2类鱼群的数量会持续增加而第1类鱼群数量将急剧减少,鱼群数量会发生显著变化,即该点也是不稳定的。
(3) 平衡点 表示第1类鱼群的数量很少,第2类鱼群数量为最大环境容纳量
表示第1类鱼群的数量很少,第2类鱼群数量为最大环境容纳量 。当
。当 时,说明第2类鱼群对第1类鱼群的抑制能力有限,随时间的变化第1类鱼群数量又会逐渐上升,所以此情形下该点是不稳定点。当
时,说明第2类鱼群对第1类鱼群的抑制能力有限,随时间的变化第1类鱼群数量又会逐渐上升,所以此情形下该点是不稳定点。当 时,说明第2类鱼群对1类鱼群的抑制能力非常强,第2类鱼群占领了所有的生存空间,使得第1类鱼群无法生存,从而该点为稳定点。
时,说明第2类鱼群对1类鱼群的抑制能力非常强,第2类鱼群占领了所有的生存空间,使得第1类鱼群无法生存,从而该点为稳定点。
(4) 平衡点 表示第1类鱼群数量和第2类鱼群数量分别稳定在
表示第1类鱼群数量和第2类鱼群数量分别稳定在 和
和 。当
。当 时,说明第2类鱼群对第1类鱼群的抑制能力非常强,使得第1类鱼群无法生存,数量急剧下降,即该点是不稳定点。当
时,说明第2类鱼群对第1类鱼群的抑制能力非常强,使得第1类鱼群无法生存,数量急剧下降,即该点是不稳定点。当 时,说明第2类鱼群对第1类鱼群的抑制能力有限,无法占领全部生存空间,使得两种鱼群的数量各自稳定在
时,说明第2类鱼群对第1类鱼群的抑制能力有限,无法占领全部生存空间,使得两种鱼群的数量各自稳定在 和
和 ,从而达到两者稳定共生。
,从而达到两者稳定共生。
从上述分析中易知该系统中有且仅有一个稳定点。当 时,点
时,点 为唯一稳定点,但这不是理想的情况;当
为唯一稳定点,但这不是理想的情况;当 时,点
时,点 为唯一稳定点,且是我们应当促成的理想状态。
为唯一稳定点,且是我们应当促成的理想状态。
5. 数值模拟
在动力学模型(1)在初始条件 ,
, 下,对C点在条件
下,对C点在条件 进行数值模拟。不妨取
进行数值模拟。不妨取 ,
, ,
, ,
, ,
, ,
, ,
, ,并用Matlab进行求解,得到图7。模拟结果表明:在初始时间段内第2类鱼群对第1类鱼群的抑制能力有限,所以第1类鱼群在开始有小幅度增长;当第2类鱼群数量持续增长,并达到最大环境容纳量
,并用Matlab进行求解,得到图7。模拟结果表明:在初始时间段内第2类鱼群对第1类鱼群的抑制能力有限,所以第1类鱼群在开始有小幅度增长;当第2类鱼群数量持续增长,并达到最大环境容纳量 时,它对第1类鱼群的抑制作用就会十分显著,使得第1类鱼群无法生存。
时,它对第1类鱼群的抑制作用就会十分显著,使得第1类鱼群无法生存。
类似地可模拟 点在条件
点在条件 下的情况。取
下的情况。取 ,其他参数不变,数值模拟得到图8。因为
,其他参数不变,数值模拟得到图8。因为
第1类鱼群的内禀增长率比第2类大,且鱼 群2的抑制系数较小,所以在一段时间内两种鱼群数量都快速增长,并且第1类鱼群先到达最大环境容纳量
群2的抑制系数较小,所以在一段时间内两种鱼群数量都快速增长,并且第1类鱼群先到达最大环境容纳量 。接着随第2类鱼群数量持续增长,并达到最
。接着随第2类鱼群数量持续增长,并达到最

Figure 7. Numerical simulation of 
图7. 当 时的数值模拟图
时的数值模拟图

Figure 8. Numerical simulation of 
图8. 当 时的数值模拟图
时的数值模拟图
大环境容纳量 ,这时它对第1类鱼群的抑制作用达到最大且不再随时间发生变化,使得第1类鱼群数量保持在
,这时它对第1类鱼群的抑制作用达到最大且不再随时间发生变化,使得第1类鱼群数量保持在 不变。这是一种理想状态。
不变。这是一种理想状态。
基金项目
浙江省自然科学基金项目(LY12A01010)和浙江省大学生科技创新活动计划(新苗人才计划)项目(2015R411035)。
文章引用
熊焕焕,王斌斌,张海亮. 鱼群偏害共生动力学模型的稳定性分析
Stability Analysis on the Dynamic Model of Fish Swarm Amensalism[J]. 应用数学进展, 2016, 05(02): 255-261. http://dx.doi.org/10.12677/AAM.2016.52032
参考文献 (References)