Creative Education Studies
Vol.
07
No.
01
(
2019
), Article ID:
28881
,
7
pages
10.12677/CES.2019.71013
Exploration on Practice Teaching of Intelligent Control Oriented Unmanned Aerial Vehicle System
Xiangke Wang1, Jihong Chang2, Yifeng Niu1, Shengde Jia1
1College of Intelligence Science and Technology, National University of Defence Technology, Changsha Hunan
2Unit 66242, Xilin Gol League Inner Mongolia

Received: Jan. 28th, 2019; accepted: Feb. 8th, 2019; published: Feb. 15th, 2019

ABSTRACT
Aiming at the demand of UAV flight control practice teaching, and taking the intelligent application as the traction, the authors put forward the practice plan of the UAV control system throughout the undergraduate-graduate stage, and conduct teaching practice in the direction of the UAV in NUDT. The undergraduate students focus on the basic knowledge, and to design the traditional PID-type path tracking control law based on a semi-physical simulation environment. The postgraduate students are mainly based on the PID-type path tracking control law, to design intelligent navigation Control law. The practice of the undergraduate-graduate stage is gradually deepened, and it really improves the students’ practical ability.
Keywords:Practice Teaching, Unmanned Aerial Vehicle System, Intelligent Control
智能控制牵引的无人机系统 实践教学探索
王祥科1,常继红2,牛轶峰1,贾圣德1
1国防科技大学智能科学学院,湖南 长沙
266242部队,内蒙古 锡林郭勒盟
收稿日期:2019年1月28日;录用日期:2019年2月8日;发布日期:2019年2月15日

摘 要
针对无人机飞行控制实践教学需求,以智能应用为牵引,提出贯穿本科–研究生阶段的无人机控制系统实践方案,并在国防科大无人机方向展开教学实践。本科生阶段以掌握基础知识为主,基于半实物仿真环境设计传统PID型航线跟踪控制律;研究生阶段以发散创新为主,在PID型航线跟踪控制律基础上,开放设计智能型无人机导航控制律。本科–研究生阶段的实践逐步深入,确实提高学生的实践能力。
关键词 :实践教学,无人机系统,智能控制

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
无人机是目前无人系统领域发展最快、水平最高、实际应用最多的一类空中无人系统 [1] [2] [3] [4] 。上世纪九十年代以来,无人机的研究在世界范围内受到了空前重视并迅速发展。相比于有人机,无人机具有响应速度快、使用成本低、部署灵活等独特优势,在国土资源勘测、抗震救灾、环境保护、航空救援、电力巡线、气象探测、农林作业、安全执法、野生动物管理、货物递送或者交付、和边境控制等领域有着广泛的应用。保守估计,2012年~2014年国际无人机市场超过100亿美元 [5] [6] ,并且在2016-2013年将继续保持13.5%以上的年增长率。在无人机快速发展的浪潮中,我国经过十余年积累,初步形成了品种齐全、功能多样的系列型号无人机,取得了显著的社会、经济和军事效益。军事领域,2013年11月,“利剑”隐身无人机首飞成功,标志着我国高端无人机技术取得了重大进展;“彩虹”、“翼龙”为军用型号无人机出口到其他国家,并投入实战。民用领域,以“大疆创新”、“亿航”和“零度”为代表的中国无人机公司在世界范围内占据着技术和销售领先的位置;“百度”、“腾讯”和“小米”等互联网巨头企业也积极投资并参与该领域。故而无人机的教学有必要跟进,使得培养的学生能够抓住无人机发展的机遇。
面对机遇和挑战,应该怎样培养人才,采取什么措施推进人才培养模式改革,提高人才培养质量?对此,国防科大前校长杨学军认为需要 [7] “以创新人才培养改革为牵引,以实践动手能力培养为重要突破口,全面提高人才培养质量和水平”。无人机系统作为传统机器人的延伸,融合控制、机械、物理、电子、传感器、计算机等领域,蕴含着极其丰富的教育资源。故而,无人机系统的教学不仅需要扎实的理论讲授,也需要高度重视创新实践教育。实践教育不仅仅体现在理工科教学中传统的实验或实践环节,它更需要渗透到无人机系统教学的全过程和各环节。为此,我们打通无人机工程方向本科生(大四)专业课“无人机飞行控制”和研究生(研一)选修课“计算智能与控制”,将无人机系统实践教学贯穿于本科–研究生教育培养的序贯过程,构建以智能应用为牵引的无人机系统实践教学体系,培养并提高学生的实践能力。
参考文章 [8] 指出我校“机器人控制”课程存在的不足之一为缺乏适用于实践教学的运动仿真模拟设备。针对该问题,为解决无人机系统实践教学的瓶颈问题,我们专门开发了无人机飞行控制半实物仿真系统。无人机系统的实践均基于半实物仿真系统。具体而言,本科生课程主要教授无人机飞行控制的基础理论,实践内容为学生掌握该半实物仿真环境,并设计传统的PID型的导航控制律。研究生课程主要讲述神经网络及控制、遗传算法及控制,和模糊系统与控制等三种计算智能方法,实践内容为在PID型导航控制律基础上,引导学生任选一种计算智能方法设计智能型无人机导航控制律。本科生阶段的课程实践以掌握基础知识为主,研究生阶段的课程实践以发散创新为主。两者一以贯之,确实提高学生在无人机系统领域的实践创新能力。几年的实践教学(2014本~2015硕,2015本~2016硕,2016本~2017硕,2017本~2018硕)表明,学生对无人机飞行和智能控制的实践创新能力得到了很好的加强。
2. 无人机飞行控制半实物仿真系统设计
无人机飞行控制半实物仿真系统主要由三部分组成:自驾仪(Autopilot),地面站(Ground Station)和X-plane飞行模拟器。它们三者之间的关系如图1所示。
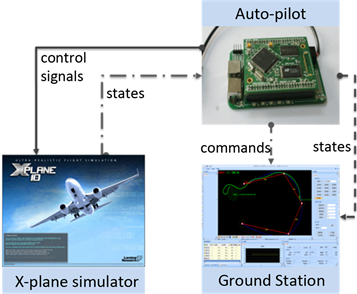
Figure 1. Physical simulation structure
图1. 实物仿真结构图
X-plane飞行模拟器是由Laminar Research开发的一款功能全面、强大的模拟飞行软件,是目前世界上最先进的飞行模拟器之一,也是FAA (美国联邦航空管理局)唯一认可的用于飞行员培养的模拟器。它提供了多种亚声速飞机、超声速飞机、军用机、民用机、固定翼飞机、直升机甚至航天飞机等的真实动力学模型和三维仿真。加载地图包括北纬74度到南纬60度的所有地形地貌,超过33,000个机场环境,甚至还包含火星地貌。可以真实地模拟晴天、大雨、阵风和暴雪等天气,可以模拟风力、风速和风向,甚至温度的突变。同时该软件还具有较好的扩展性,能够支持开发人员进行二次开发。
自驾仪和地面站借助实验室科研条件自主开发。其中自驾仪基于ARM Cortex-M4开发,主要用来管理无人机的飞行控制算法;地面站主要用来显示无人机状态和传达指控人员命令。
半实物仿真中采用PT60小型固定翼飞机,参数如图2:

Figure 2. Fixed-wing UAV and its parameters in the simulation system
图2. 仿真系统中固定翼无人机及参数
3. 无人机飞行控制半实物仿真实践教学
3.1. 无人机航线跟踪控制实验设计
实践教学中设计了基于构建的无人机飞行控制半实物仿真系统的航线跟踪实验,它是自驾仪ARM中的独立函数模块,以C语言实现。航线跟踪为无人机导航控制的关键控制算法之一,是指无人机跟踪预先设定的航线飞行。如图3所示,直线WiWi + 1为无人机预先设定的航线,p为无人机当前位置。航向跟踪需要为无人机设计控制律,使得位置p落在航线WiWi + 1上,且飞向Wi + 1点。

Figure 3. UAV route tracking
图3. 无人机航线跟踪示意
通过将自驾仪中的飞控代码剥离,我们构建了单独的航线跟踪模块。学生在实践过程中,只需要设计合适的航线跟踪控制律,替换现有的航线跟踪模块,即可完成具有高仿真度的无人机的航线跟踪控制。
为贯通本科和硕士课程,分别设计了本科阶段的规定内容实践和硕士阶段的创新性实践。其中,本科“无人机飞行控制基础”课程的实践内容主要为基于半实物仿真环境设计传统的PID型的导航控制律,并手动控制参数,使得无人机能够跟随航线飞行。研究生课程“计算智能与控制”实践内容为在PID型导航控制律基础上,任选一种计算智能(神经网络、模糊控制和遗传算法)控制方法设计智能型无人机导航控制律。
3.2. 本科生PID型控制律设计及参数调整实践
在熟悉半实物仿真环境的基础上,指导学生在自驾仪中设计传统的PID型航线跟踪控制律,实现无人机沿着指定航线飞行;而后要求学生根据经验不断调整控制参数,并比较不同参数条件下的无人机跟踪性能。
传统航线跟踪控制律以PLOS算法(纯追逐和基于视线的路径跟随算法)为例设计。它是纯粹追逐导引律和基于视线的导引的结合。如图3,跟踪律形式为:
 (1)
(1)
其中,θ是航线和水平线的夹角,θu是无人机和Wi连线和水平线之间的角度。
式(1)的跟踪律实际上只是角度和侧偏距两种比例控制的结合。本科生实践课程中主要指导学生在自驾仪中实现式(1)的控制律,并进一步扩展到PID或者自抗扰控制的形式,实现无人机的航线跟踪控制。在此基础上,指导学生调整控制参数k1和k2的大小,并比较不同参数条件下的无人机跟踪性能。图4给出了k1和k2取不同值时的某条航线跟踪效果。故而,为取得好的航线跟踪性能,必须经过较多次的仿真飞行试验,得到合适的k1和k2。
 (a) (k1, k2) = (1.2, 1.6)
(a) (k1, k2) = (1.2, 1.6)
 (b) (k1, k2) = (1.3808, 1.7451)
(b) (k1, k2) = (1.3808, 1.7451)
 (c) (k1, k2) = (1.3895, 1.7629)
(c) (k1, k2) = (1.3895, 1.7629)
 (d) (k1, k2) = (1.3919, 1.7676)
(d) (k1, k2) = (1.3919, 1.7676)
Figure 4. Tracking effect of a certain route when k1 and k2 are different values
图4. k1和k2不同取值时某条航线跟踪效果
3.3. 研究生智能型无人机导航控制实践
传统的控制律设计在调整优化控制参数时主要依据经验,先试凑再实验验证,实验周期长,性能难以最优。故而,在研究生实践课程中,引导学生任选一种计算智能(神经网络、模糊控制和遗传算法)控制方法,来优化或者自主调整算法(1)的参数k1和k2的值。
为方便智能型导航控制对大量数据采集的需要,我们基于Matlab的simulink模块构建了无人机飞行模拟仿真环境。该环境采用的飞控算法和半实物仿真自驾仪中的飞控算法完全一致。智能型控制算法可以先在matlab环境中得到验证,而后移植到半实物仿真环境。
实际实践中,学生主要采用方法包括:基于BP神经网络的控制参数训练,基于遗传算法的参数优化,和基于模糊PID控制的参数优化等,取得了比较好的智能控制效果。图5给出了基于BP神经网络的控制参数训练实践流程图。
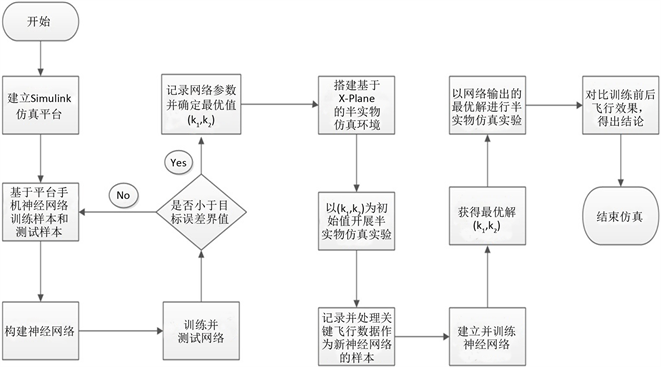
Figure 5. Training process of control parameters based on BP neural network
图5. 基于BP神经网络的控制参数训练流程
图6给出了参数k1和k2随着训练样本数增加的变化趋势,图7为训练得到的最优参数值取值时,无人机跟踪某条航线的效果。
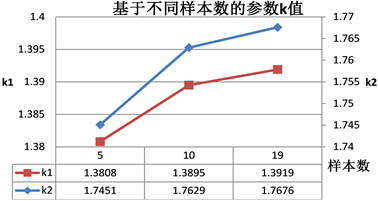
Figure 6. Relationship between sample size and parameter k
图6. 样本数和参数k的关系图
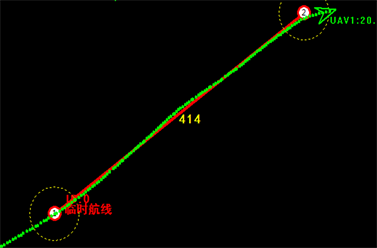
Figure 7. Optimal route (k1, k2) = (1.393, 1.770) of a route tracking map
图7. 最优参数(k1, k2) = (1.393, 1.770)的某航线跟踪图
4. 结论
本文介绍了国防科大无人机工程方向尝试构建的以智能应用为牵引的无人机系统实践,将无人机飞行控制试验贯穿于本科–研究生教育全阶段。本科生阶段以掌握基础知识为主,基于半实物仿真环境设计传统PID型航线跟踪控制律;研究生阶段以发散创新为主,在PID型航线跟踪控制律基础上,开放设计智能型无人机导航控制律。本科–研究生阶段的实践逐步深入,有效地提高了学生的创新实践能力。
基金项目
本文研究受“国防科技大学教育教学研究重点课题”(项目编号:U2018103)资助,特此致谢。
文章引用
王祥科,常继红,牛轶峰,贾圣德. 智能控制牵引的无人机系统实践教学探索
Exploration on Practice Teaching of Intelligent Control Oriented Unmanned Aerial Vehicle System[J]. 创新教育研究, 2019, 07(01): 73-79. https://doi.org/10.12677/CES.2019.71013
参考文献
- 1. 陈宗基, 张汝麟, 张平, 等. 飞行器控制面临的机遇和挑战[J]. 自动化学报, 2013, 39(6): 703-710.
- 2. 郭胜伟. 无人化战争[M]. 北京: 国防大学出版社, 2011.
- 3. 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2013.
- 4. Office of the Secretary of Defense (2011) The Unmanned Systems Integrated Road-map-FY2011-2036.
- 5. Kumar, V. and Michael, N. (2012) Opportunities and Challenges with Autonomous Micro Aerial Vehicles. The International Journal of Robotics Research, 31, 1279-1291. https://doi.org/10.1177/0278364912455954
- 6. UAV Market Research (2011) US Military Unmanned Aerial Vehicles (UAV) Market Forecast 2010-2015. http://www.uavmarketresearch.com/
- 7. 杨学军. 加强实践动手能力培养, 改革创新人才培养模式[J]. 高等教育研究学报, 2013, 36(1): 4-7.
- 8. 王建文, 何晓峰, 沈辉, 等. 我校“机器人控制”课程建设的一些举措[J]. 电气电子教学学报, 2012, 34(4): 32-35.