设为首页
加入收藏
期刊导航
网站地图
首页
期刊
数学与物理
地球与环境
信息通讯
经济与管理
生命科学
工程技术
医药卫生
人文社科
化学与材料
会议
合作
新闻
我们
招聘
千人智库
我要投搞
办刊
期刊菜单
●领域
●编委
●投稿须知
●最新文章
●检索
●投稿
文章导航
●Abstract
●Full-Text PDF
●Full-Text HTML
●Full-Text ePUB
●Linked References
●How to Cite this Article
Computer Science and Application
计算机科学与应用
, 201
4, 4
,
1-6
http://dx.doi.org/10.12677/csa.2014.41001
Published Online
January 2014 (http://www.hanspub.org/journal/csa
.html
)
Research and Implementation of Indoor Localization
Method Based on Peer-to-Peer Auxiliary
Xiaojun Zhou, Peng Liu
Institute of Computer Application, Hangzhou Dianzi University, Hangzhou
Email:
chowxiaojun@126.com, perryliu@hdu.edu.cn
Received: Dec. 16
th
, 2013; revised: Jan. 10, 2014; accepted: Jan. 16
th
, 2014
Copyright © 2014 Xiaojun Zhou, Peng Liu
. This
is an open access article distributed under the Creative Commons Attribution License, which permits
unrestricted use, distribution, an d reproduction in any medium, provided the origin al work is properly cited. In accordance of th e Creative Commons
Attribut
ion License all Copyrig hts © 201
4
are reserved for Hans and the owner o f the intell ectual property Xiaojun Zhou, Peng Liu. All Copyright ©
201
4 are guarded by law and by Hans as a guardian.
Abstract:
With the rapid development of mobile smart device and mobile Internet, people
’
s demand for location
-
based
services is increasing. Compared to
the outdoor environment u sing
GPS
, precise positioning is more difficult in indoor
environment. This
paper describes the indoor localizat
ion method based
on
peer
-
to
-
pee
r auxiliary. The method utilizes
GPS
of out
door smart devices
to get accurate datum
point, and
impleme n t
s
localization
by
RSSI assist
ing
the indoor
smart devices. This paper analyzes the
principle
of the
indoor
localization
method, and gives a detailed solution.
Expe-
rimental results show that the method
is of high feasibility.
Keywords:
Smart Devi
ce;
Indoor Localization
;
Peer
-
to
-
Peer Auxiliary
基于点对点辅助的室内定位方法研究与实现
周晓军,刘
鹏
杭州电子科技大学应用研究所,杭州
Email:
chowxiaojun@126.com, perryliu@hdu.edu.cn
收稿日期:
2013
年
12
月
16
日;修回日期:
2014
年
1
月
10
日;录用日期:
2014
年
1
月
16
日
摘
要:
随着移动终端和移动互联网的发展,人们对于基于位置信息的服务的需求日益增大。相比室外环境可
以采用
GPS
定位方法,在室内环境下,精确定位比较困难。本文描述了一种基于点对点辅助室内定位方法。该
方法利用室外移动智能终端的
GPS
获得精准基准点并通过
RSSI
协助室内移动智能终端实现定位。该文详细地
分析了该室内定位方法的工作原理,并给出了详细的设计方案。实验结果表明,该方法具有较高的可行性。
关键词:
移动智能终端;室内定位;点对点辅助
1.
引言
随着移动智能终端的普及化以及移动互联网的
发展,人们对定位与导航的需求日益增长。尤其是在
室内环境下,例如在智能家居中,室内的各种电器设
备根据用户的位置打开或关闭。在大型超市或者商场
中,通过借助室内导航快速找到一些重要或特殊的位
置,例如某个货架、出入口、电梯
口等
;通过实时定
位跟踪小孩的位置
以防止小孩
走失;还可根据用户的
位置向用户推送更多关于商品的介绍和广告。在地下
停车场中,如何方便快速地找到自己的停车位等等。
对于室外环境而言,目前已经有卫星或者移动基站定
位,但对于室内环境而言,一方面卫星信号因无法穿
透建筑物而失去作用,另一方面移动基站的定位精度
太低,根本无法满足室内精度的要求,再加上室内环
OPEN ACCESS
1
基于点对点辅助的室内定位方法研究与实现
境复杂多变,因此近年来国内外研究人员对室内定位
进行了大量的研究,目前已出现了多种室内定位方法,
主要有以下两类:
第一类是基于
Wi
-
Fi
的室内定位方法,此类方法
有很多种,大多数都是通过接收
Wi
-
Fi
接入点获得无
线信号强度值
RSSI
,来分析和计算人们的位置信息。
常用的
Wi
-
Fi
室内定位方法有基于
RSSI
指纹库的定
位方法
[1]
、基于信号传播损耗模型的定位方法
[2]
等。
这类方法的优势是系统成本低,无需开发新的硬件平
台,但它们一般都需要大量的前期调研工作,
而且定
位精度的稳定性较差。因此,有研究人员根据这两个
问题提出了很多的解决方案,例如通过结合移动终端
中的惯性传感器和一些盲点位置
[3
,4]
,利用室内摄像头
将视觉信号的高精度性与
Wi
-
Fi
信号的普遍性结合起
来实现定位
[5]
,还有将核心定位算法布置在中心服务
器上
[6]
,即将大量复杂的计算交给服务器。以上这些
解决方案都在一定程度上解决了这两个问题,但是往
往是通过增加整个系统的复杂性为代价的。第二类方
法是通过在定位区域部署一些额外的设施
(
例如,蓝牙
基站,
RFID
标签
)
来实现定位,虽然可以获得较高的
定位精度,但是这些方法的成本往往很高,例如诺基
亚公司提出的基于
HAIP
技术的室内精确定位解决方
案
[7]
,该方案采用基于蓝牙的三角定位算法,除了需
要在待定目标上安装蓝牙模块外,还需要在屋顶固定
位置部署蓝牙基站。
上述这两类室内定位方法都忽视了当前移动智
能终端高度智能化、社交化的特点,因此本文
针对以
上这些定位方法的不足,并结合室外移动智能终端
GPS
高精度定位的优势,本文提出了一种基于
点对点
辅助的室内定位方法。该定位方法利用人们普遍使用
的移动
智能终端
,
以室外
终端设备
的高精度
GPS
经纬
度坐标为基准,室内移动设备通过无线通信手段与其
通信获得该坐标并测得
RSSI
值,再结合其他的一些
信息就可完成定位。该定位方法仅仅利用用户手中的
终端设备和现有的成熟技术,具有成本低,且不需要
大量的前期调研工作等优点。
2.
定位模型与过程
基于点对点辅助的室内定位方法的模型由如下
两部分组成:
1)
室内用户
{ }
12
, ,,
ii i
in n
UserU UU
=
,其
中
i
n
U
表示第
n
个位于室内的用户;
2)
室外用户
{ }
12
, ,,
oo o
out m
UserU UU
=
,其 中
o
m
U
表示第
m
个位于室
外的用户。为了方便描述,以下称室内用户为未知节
点,室外用户为参考节点,室内外用户均携带移动智
能终端。所有参考节点的位置坐标也可用一个集合
Position
=
{(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
,
, (
x
n
,
y
n
)}
来表示,其中
(
x
n
,
y
n
)
表示第
n
个参考节点的位置坐标。
在定位过程中,参考节点需要通过一定的无线通
信方式将必要的定位信息数据发给未知节点,当未知
节点聚集和处理一定量的数据之后,然后结合具体的
定位算法即可实现定位,例如本文采用的基于
RSSI
的加权质心算法
[8]
,三边测量算法
[9]
,基于
RSSI
的局
部梯度算法
[10]
等等
。在
本文中,参考节点和未知节点
采用
Wi
-
Fi
方式进行交互:在定位过程中,未知节点
开启便携式
Wi
-
Fi
热点功能,并采用开放式热点的方
式,参考节点无需验证即可直接连接到该热点上并向
未知节点发送定位信息数据。由于此时未知节点作为
热点,那么参考节点可测得此时热点的
RSSI
值,可
用集合
RSSI = {rssi
1
, rssi
2
,
, rssi
n
}
表示,其中
rssi
n
表示第
n
个参考节点测到热点的
RSSI
值。若参考节
点
A
向未知节点
B
发送上述的定位信息数据,则该数
据主要包含以下几个部分:
1)
参考节点
A
的坐标位
置;
2)
参考节点
A
此时测得的
RSSI
值;
3)
其他信
息,例如时间戳等。
依据场景的不同,本文提出的定位方法有两种不
同的定位过程:在第一种场景下,在室外确实存在多
个参考节点用于未知节点定位,称为同步定位;在第
二种场景下,在室外可能并不存在那么多的参考节点,
在极端情况下,室外可能只有一个参考节点。在该场
景下为了辅助未知节点完成定位,参考节点可通过不
断的移动模拟同步定位的方式,称为虚拟定位。但是
采用虚拟定位方式完成定位会产生一定的时延。本文
的具体实验将在第二个场景下进行,在第
3
节中本文
将详细分析各种影响定位精度的因素和该定位方法
的性能。
3.
基于
RSSI
的加权质心算法及优化
3.1.
基于
RSSI
的加权质心算法
传统质心算法是利用多个参考节点所组成的多
边形的质心作为未知节点的位置坐标。但是这种简单
OPEN ACCESS
2
基于点对点辅助的室内定位方法研究与实现
叠加之后求平均值的算法的定位精度受参考节点的
分布状况及参考节点个数的影响非常大。
基于
RSSI
的加权质心算法
[8]
是根据参考节点与未知节点之间的
RSSI
值,计算每个参考节点坐标所对应的加权值,这
样反映出每个参考节点坐标对质心位置的影响程度。
以下为加权质心算法的计算公式:
1
1
n
ii
i
n
ii
i
xx
yy
ω
ω
=
=
=
=
∑
∑
(1)
上式中,
ω
i
表示第
i
个参考节点对应的加权权值。通
常,可以直接利用
RSSI
值作为各个参考节点坐标的
加权权值。本文利用
公式
(2)
处理集合
RSSI
,
rssi
20
rssip 10
i
g
i ref
P
= ⋅
(2)
上式中,
P
ref
是参考功率,本文中的取值为
1
mW
。通
过该公式,可以将
RSSI
值
(
单位:
dBm
)
转换为功率
(
单
位:
mW
)
的
g
次方。其中,
g
是一个常数,它定义了
最大
RSSI
值与最小
RSSI
值之间的权重差额的大小。
因此,通过公式
(2)
处理后得到一个新集合
RSSIP
=
{rssip
1
,
rssip
2
,
, rssip
n
}
。
此时,加权权值
ω
i
可通过
公式
(3)
计算可得。
1
rssip
rssip
i
i
n
i
i
ω
=
=
∑
(3)
以上对算法及对加权权值选择进行了较为详细
的描述,下面是该算法的具体步骤:
1)
建立
RSSI
值和参考节点坐标的集合及两者的
对应关系,并处理
RSSI
值集合:
①
RSSI
值集合:
RSSI
= {rssi
1
, rssi
2
,
,
rssi
n
}
;
②相应的参考节点坐标集合:
Position
=
{(
x
1
,
y
1
)
,
(
x
2
,
y
2
),
, (
x
n
,
y
n
)}
;
③按照公式
(2)
处理
RSSI
集合:
RSSIP = {rssip
1
,
rssip
2
,
, rssip
n
}
。
2)
参考节点的选择:在上述已经建立的集合中,
通过一些优化,筛选出能使定位精度提高的参考节点,
建立新的
RSSIP
集合和参考节点位置坐标集合,本文
将在
2.2
中详细描述如何去做优化;
3)
按公式
(1)
计算未知节点的坐标;
4)
计算定位误差:通过计算真实坐标与计算所得
坐标之间距离即可。
3.2.
存在问题及优化
综上所述,基于
RSSI
的加权质心算法简单且容
易实现。然而,在实际应用中利用该算法会遇到两个
问题:
1)
常数
g
的取值问题,即如何取得常数
g
的最
优值;
2)
参考节点的选择,即如何选择合适的参考节
点的坐标参与计算。
对于常数
g
的取值问题,由于常数
g
间接地定义
参考节点的位置坐标对质心位置的影响程度。因此,
常数
g
的选择对定位结果的精度有很大的影响。实验
结果表明,在本文的测试环境中
g
取值为
1.3
的时候,
定位的精度最高。
对于参考节点的选择,已
在该算法的步骤
2
中提
到,在这里将详细分析为什么要选择合适地参考节点,
并提出了一个优化方案。由于质心定位算法原理
可知,
未知节点的位置坐标只能位于这些参考节点的范围
内。
所以
,选择合适的未知节点是非常重要的。最好
的选择就是对于未知节点来说,所选参考节点的分布
是均匀的,而且是分布在未知节点的四周。该
文优化
方案为:利用聚类算法对集合
Position
进行处理,例
如
k-
mean
聚类算法
[11]
,将 集 合
Position
聚类为四个集
合,然后在这四个集合再选择那些
RSSI
值较大的参
考节点,最后将所选的参考节点重新建立参考节点与
RSSI
值两者之间的映射关系。通过上述的优化所得到
的参考节点组合对于未知节点来说是均匀分布在其
周围的,使得定位结果的精度有一定的提高。
4.
实验结果
为了验证本文提出方法的可行性,本文在一个真
实的实验场地进行一系列相关实验。本文选择的实验
场地为某教学科研楼一楼大厅,图
1
为实验场地的平
面图。
具体
实验设置如下:首先,在室外固定
10
个
点作为参考点,这
10
个点的位置坐标信息可通过
GPS
获得。然后,一个实验人员手持智能手机位于室内的
某个点,另一个实验人员也手持智能手机分别在室外
10
参考点上采集室内未知节点的
RSSI
值。最后,在
室内也取
10
个点作为未知点,用相同的步骤处理。
位于室外的
10
参考点分布在室内各个未知点的周围
且分布比较均匀。对于室内
10
个未知点的真实位置
OPEN ACCESS
3
基于点对点辅助的室内定位方法研究与实现
Figure 1. The plan of experimental site
图
1.
实验场地平面图
坐标,本文利用室外参考点的位置信息加上皮尺的实
际测量得到,通过与实验得到的位置坐标进行比较,
就可以得到该定位方法的误差。
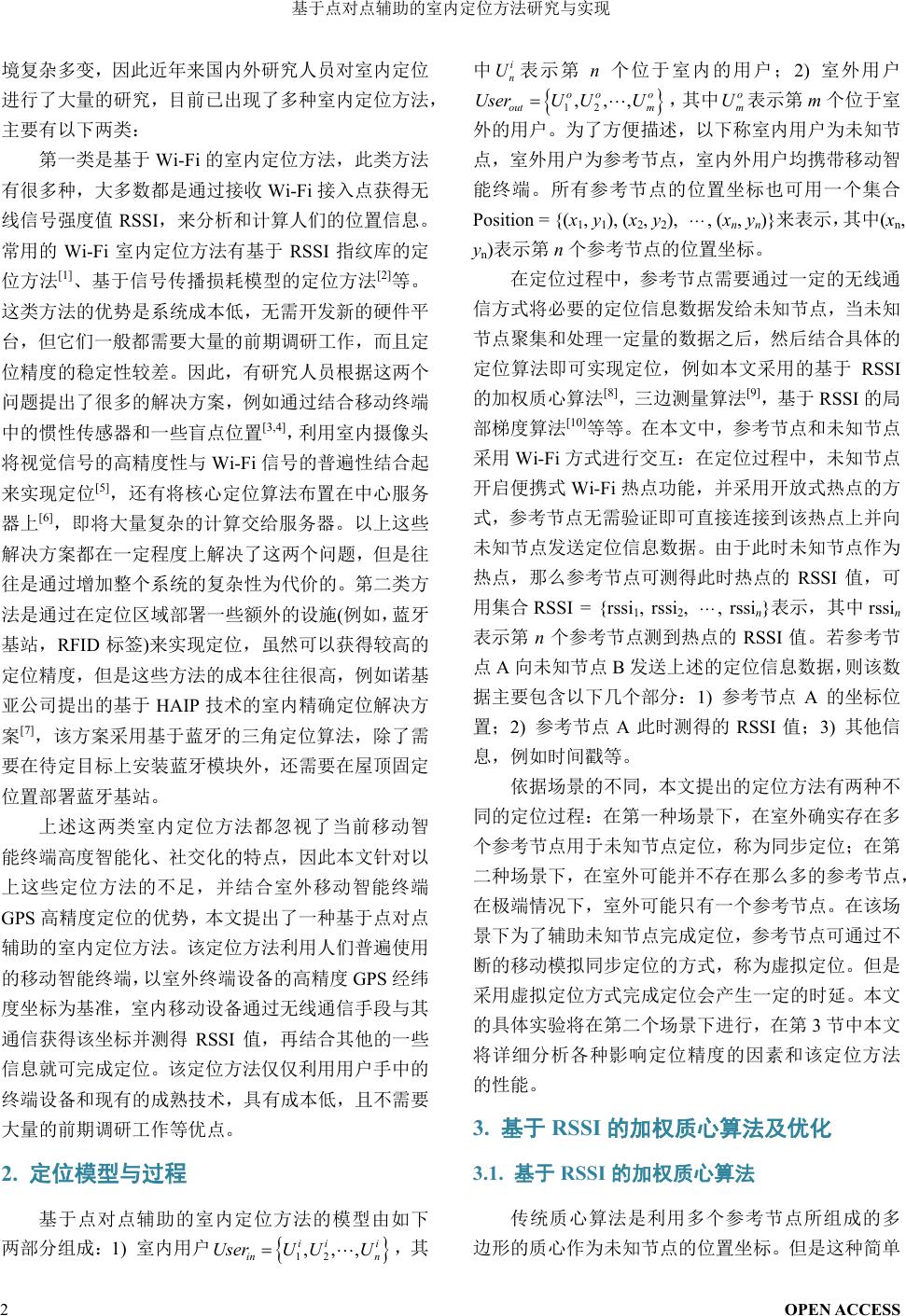
在基于
RSSI
的加权质心算法中,本文
采用
RSSIP
作为权值,因此需要确定该算法中的唯一参数
——
常
数
g
。为了得到在实验场地中常数
g
的最优值,在实
验中,我们设置
g
的取值范围在
[0.1 - 5]
之间,并以
0.1
作为间隔。以室外
10
个参考节点都作为基准位置,
计算在实验场地中室内各个未知节点的位置坐标和
误差。实验结果如图
2
所示,
常数
g
在实验场地中的
最优值为
1.3
。从图中可看出,在较理想的情况下,
该定位方法的平均误差在
3 m
左右。
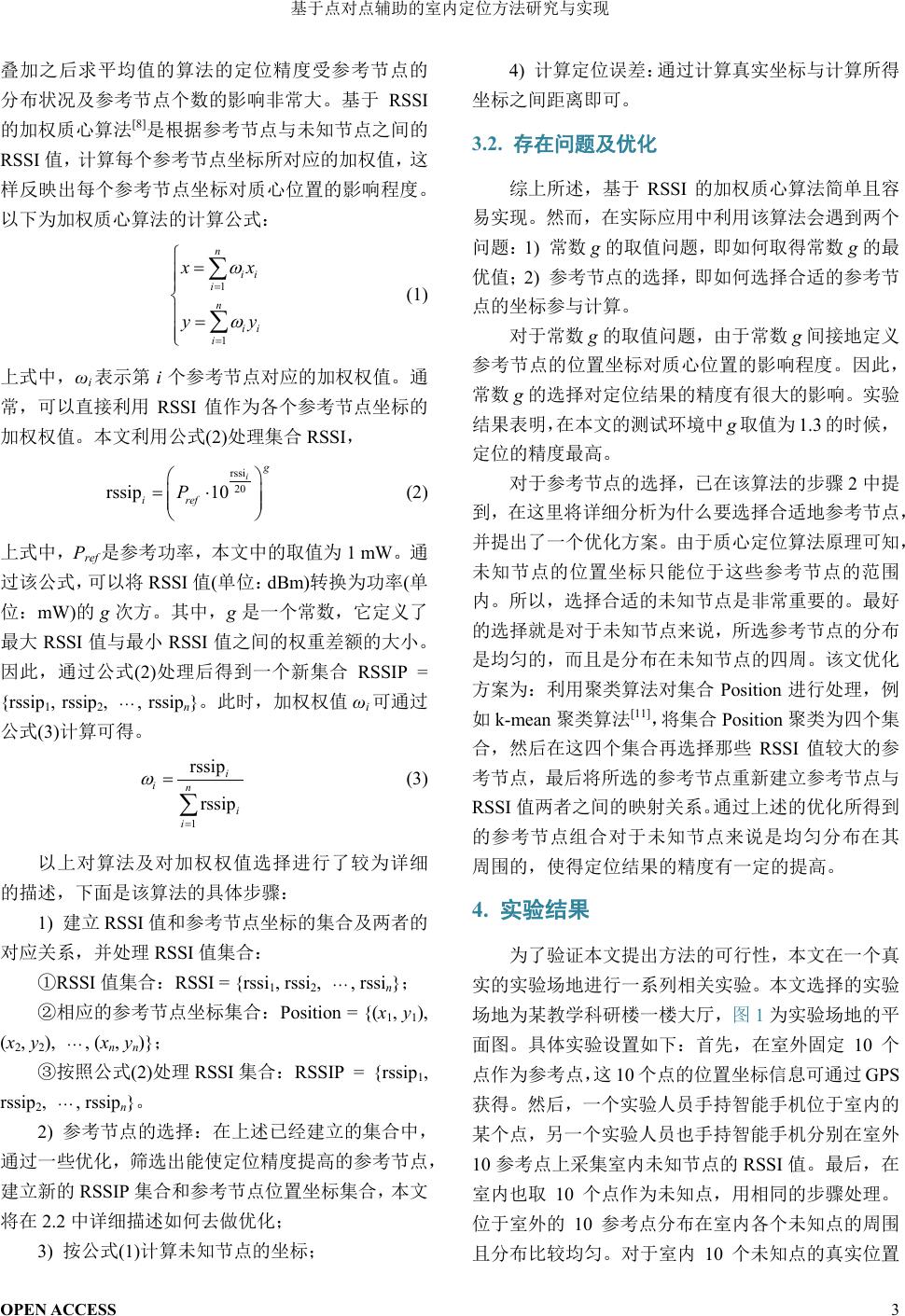
除了得到常数
g
的最优值,还要考虑一个问题:
利用常数
g
处理
RSSI
,是否对定位精度有一定的提升?
所以,本文分别采用
RSSIP
和
RSSI
作为权值计算未
知节点的位置坐标,然后比较两者的定位误差,如图
3
所示,当采用
RSSIP
作为权值时,各个未知节点的
位置坐标精度较高。
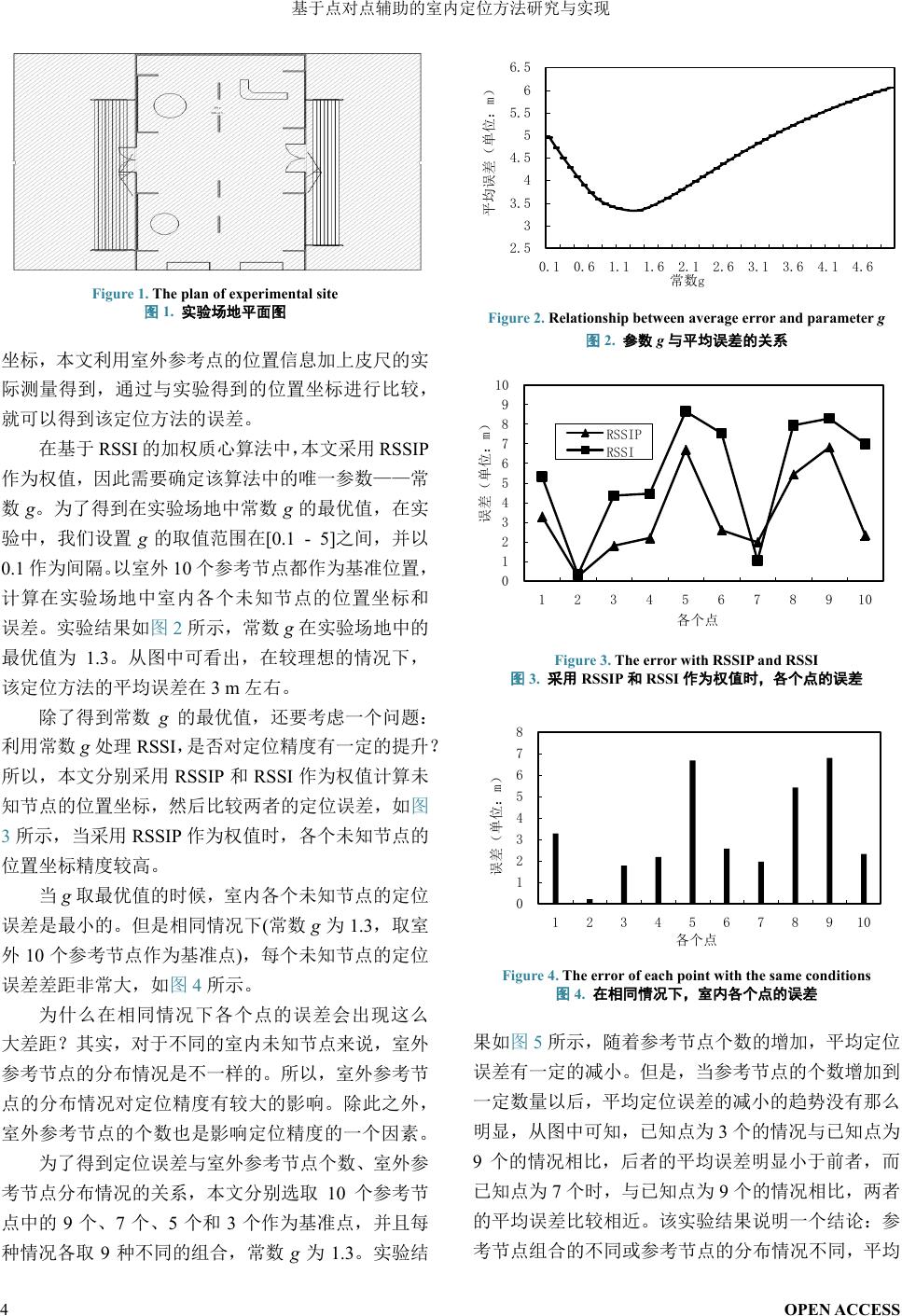
当
g
取最优值的时候,室内各个未知节点的定位
误差是最小的。但是相同情况下
(
常数
g
为
1.3
,取室
外
10
个参考节点作为基准点
)
,每个未知节点的定位
误差差距非常大,如图
4
所示。
为什么在相同情况下各个点的误差会出现这么
大差距?其实,对于不同的室内未知节点来说,室外
参考节点的分布情况是不一样的。所以,室外参考节
点的分布情况对定位精度有较大的影响。除此之外,
室外参考节点的个数也是影响定位精度的一个因素。
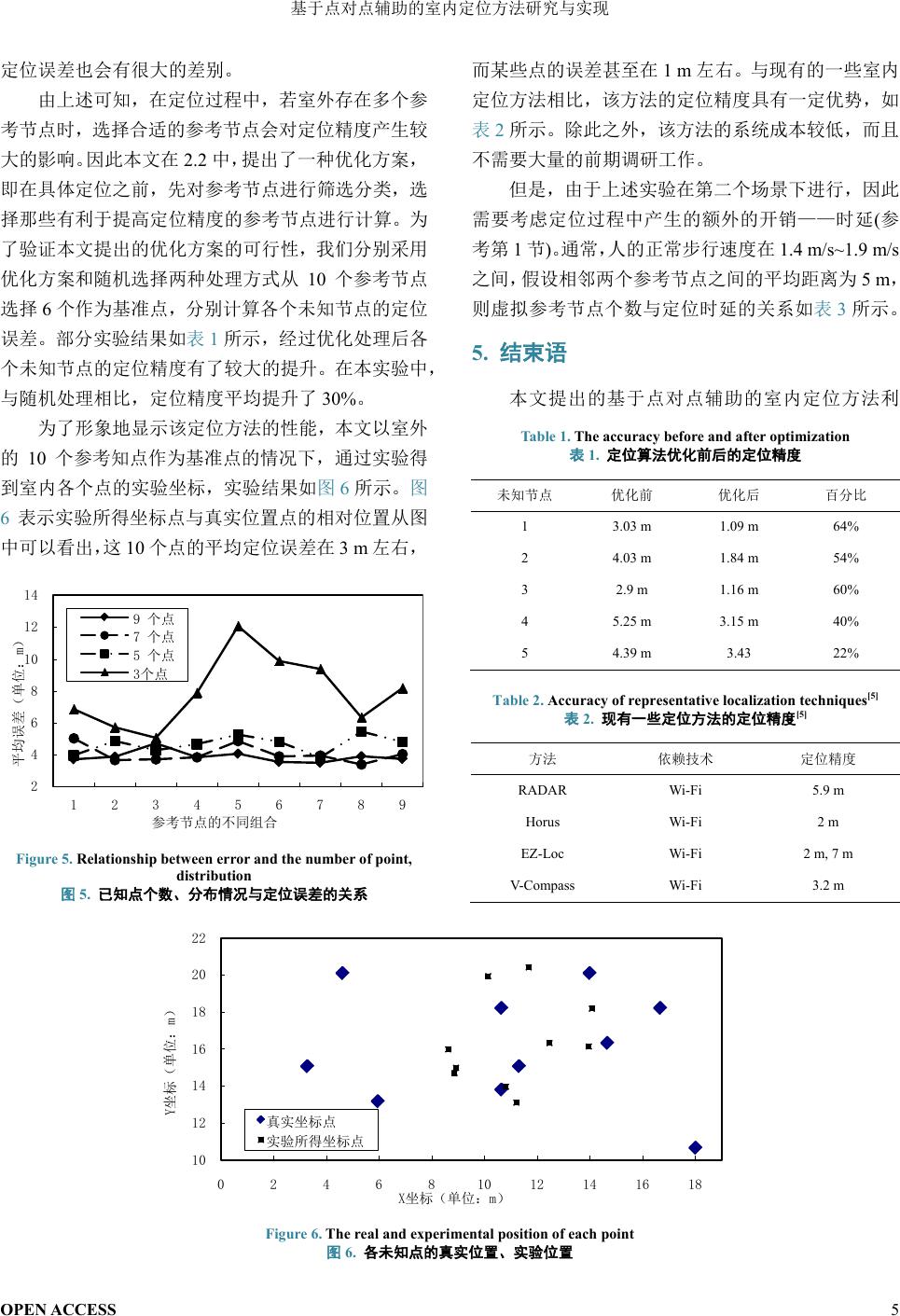
为了得到定位误差与室外参考节点个数、室外参
考节点分布情况的关系,本文分别选取
10
个参考节
点中的
9
个、
7
个、
5
个和
3
个作为基准点,并且每
种情况各取
9
种不同的组合,常数
g
为
1.3
。实验结
Figure 2. Relationship between average error and parameter
g
图
2.
参数
g
与平均误差的关系
Figure 3. The error with RSSIP and RSSI
图
3.
采用
RSSIP
和
RSSI
作为权值时,各个点的误差
Figure 4. The error of each point with the same conditions
图
4.
在相同情况下,室内各个点的误差
果如图
5
所示,随着参考节点个数的增加,平均定位
误差有一定的减小。但是,当参考节点的个数增加到
一定数量以后,平均定位误差的减小的趋势没有那么
明显,从图中可知,已知点为
3
个的情况与已知点为
9
个的情况相比,后者的平均误差明显小于前者,而
已知点为
7
个时,与已知点为
9
个的情况相比,两者
的平均误差比较相近。该实验结果说明一个结论:参
考节点组合的不同或参考节点的分布情况不同,平均
2.5
3
3.5
4
4.5
5
5.5
6
6.5
0.1 0.6 1.11.6 2.1 2.63.1 3.6 4.1 4.6
平均误差(单位:
m
)
常数
g
0
1
2
3
4
5
6
7
8
9
10
123456789
10
误差(单位:
m
)
各个点
RSSIP
RSSI
0
1
2
3
4
5
6
7
8
123456789
10
误差(单位:
m
)
各个点
OPEN ACCESS
4
基于点对点辅助的室内定位方法研究与实现
定位误差也会有很大的差别。
由上述可知,在定位过程中,若室外存在多个参
考节点时,选择合适的参考节点会对定位精度产生较
大的影响。因此本文在
2
.2
中,提出了一种优化方案,
即在具体定位之前,先对参考节点进行筛选分类,选
择那些有利于提高定位精度的参考节点进行计算。为
了验证本文提出的优化方案的可行性,我们分别采用
优化方案和随机选择两种处理方式从
10
个参考节点
选择
6
个作为基准点,分别计算各个未知节点的定位
误差。部分实验结果如表
1
所示,经过优化处理后各
个未知节点的定位精度有了较大的提升。在本实验中,
与随机处理相比,定位精度平均提升了
30%
。
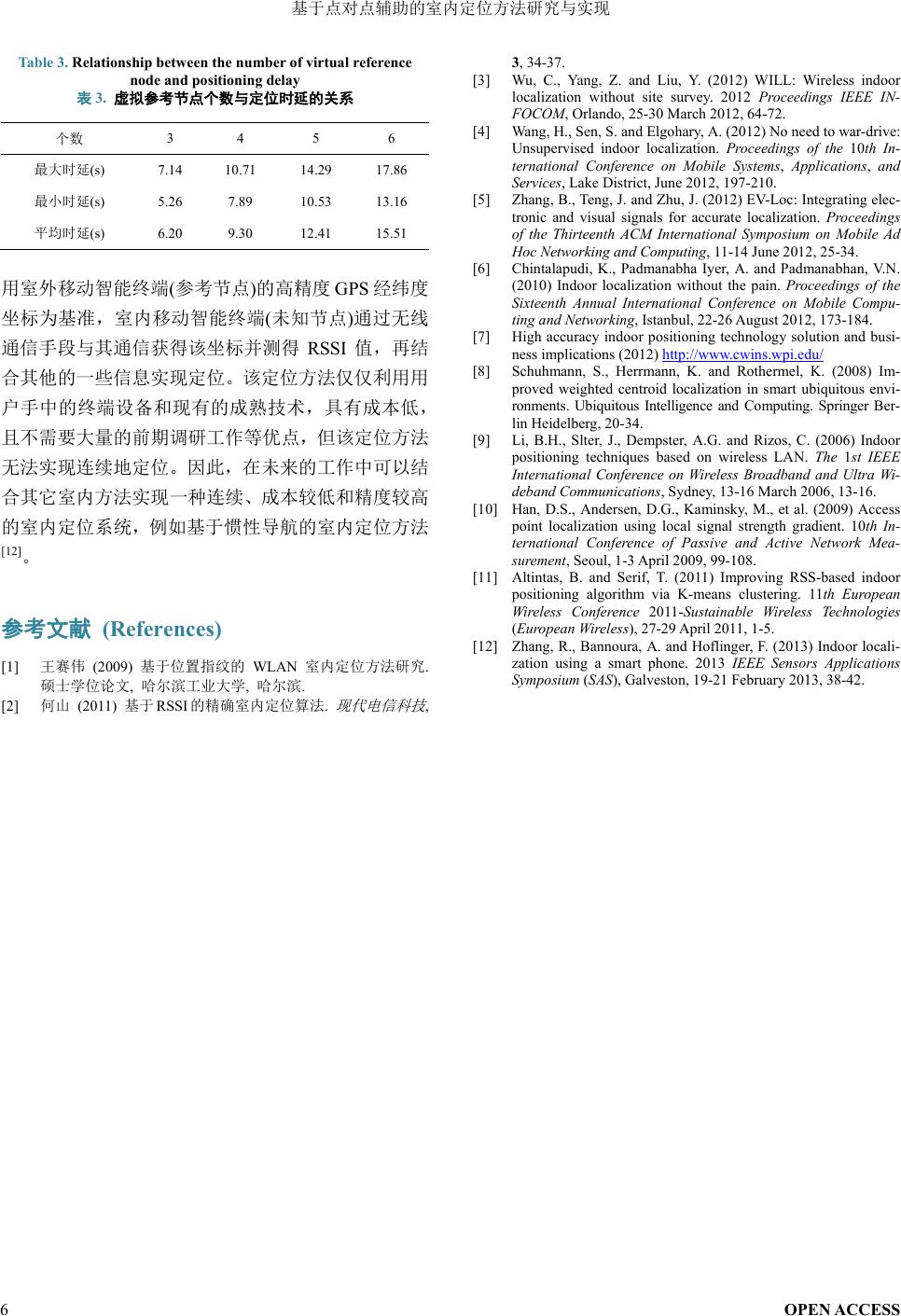
为了形象地显示该定位方法的性能
,本文以室外
的
10
个参考知点作为基准点的情况下,通过实验得
到室内各个点的实验坐标,实验结果如图
6
所示。图
6
表示实验所得坐标点与真实位置点的相对位置从图
中可以看出,这
10
个点的平均定位误差在
3 m
左右,
Figure 5. Relationship between error and the number of point,
distribution
图
5.
已知点个数、分布情况与定位误差的关系
而某些点的误差甚至在
1 m
左右。与现有的一些室内
定位方法相比,该方法的定位精度具有一定优势,如
表
2
所示。除此之外,该方法的系统成本较低,而且
不需要大量的前期调研工作。
但是,由于上述实验在第二个场景下进行,因此
需要考虑定位过程中产生的额外的开销
——
时延
(
参
考第
1
节
)
。通常,人的正常步行速度在
1.4
m/s
~1.9
m/s
之间,假设相邻两个参考节点之间的平均距离为
5 m
,
则虚拟参考节点个数与定位时延的关系
如表
3
所示
。
5.
结束语
本文提出的基于点对点辅助的室内定位方法利
Table 1. The accuracy before and after optimization
表
1.
定位算法优化前后的定位精度
未知节点
优化前
优化后
百分比
1 3.03 m 1.09 m 64%
2 4.03 m 1.84 m 54%
3 2.9 m 1.16 m 60%
4 5.25 m 3.15 m 40%
5 4.39 m 3.43
22%
Table 2. Accuracy of representative localization techniques
[5]
表
2.
现有一些定位方法的定位精度
[5]
方法
依赖技术
定位精度
RADAR
Wi
-Fi
5.9 m
Horus
Wi
-Fi 2 m
EZ
-Loc
Wi
-Fi 2
m,
7 m
V-
Comp
ass
Wi
-Fi
3.2 m
Figure 6. The real and experimental position of each point
图
6.
各未知点的真实位置、实验位置
2
4
6
8
10
12
14
123456789
平均误差(单位:
m
)
参考节点的不同组合
9
个点
7
个点
5
个点
3
个点
10
12
14
16
18
20
22
02468
10 12 14 16 18
Y
坐标(单位:
m
)
X
坐标(单位:
m
)
真实坐标点
实验所得坐标点
OPEN ACCESS
5
基于点对点辅助的室内定位方法研究与实现
Table 3. Relationship between the number of virtual reference
node and positioning delay
表
3.
虚拟参考节点个数与定位时延的关系
个数
3 4 5 6
最大时延
(s)
7.14
10.71
14.29
17.86
最小时延
(s)
5.26
7.89
10.53
13.16
平均时延
(s)
6.20
9.30
12.41
15.51
用室外移动智能终端
(
参考节点
)
的高精度
GPS
经纬度
坐标为基准,室内移动智能终端
(
未知节点
)
通过无线
通信手段与其通信获得该坐标并测得
RSSI
值,再结
合其他的一些信息实现定位。该定位方法仅仅利用用
户手中的终端设备和现有的成熟技术,具有成本低,
且不需要大量的前期调研工作等优点,但该定位方法
无法实现连续地定位。因此,在未来的工作中可以结
合其它室内方法实现一种连续、成本较低和精度较高
的室内定位系统,例如基于惯性导航的室内定位方法
[12]
。
参考文献
(References)
[1]
王赛伟
(2009)
基于位置指纹的
WLAN
室内定位方法研究
.
硕士学位论文
,
哈尔滨工业大学
,
哈尔滨
.
[2]
何山
(2011)
基于
RSSI
的精确室内定位算法
.
现代电信科技
,
3
, 34-37.
[3]
Wu
, C.
, Yang
, Z. and
Liu
,
Y.
(2012)
WILL: Wireless indoor
localization without site survey
.
2012
Proceedings IEEE
IN-
FOCOM
, Orlando
, 25
-30 March 2012
, 64
-72.
[4]
Wang
, H., Sen, S. and Elgohary,
A.
(2012) No need to war -drive:
Unsupervised indoor localization
.
Proceedings of the
10
th In-
ternational Conference
on Mobile
Systems
,
Applications
,
and
Services
,
Lake District, June 2012, 197-210.
[5]
Zhang, B.
, Te ng
, J. and
Zhu
,
J.
(2012) EV-L
oc: Integrating elec-
tronic and visual signals for accurate localization
.
Proceedings
of the
Thirteenth ACM
International Symposium on Mobile Ad
Hoc Networking and Computing
,
11
-14 June 2012, 25-
34.
[6]
Chintalapudi, K.
, Padmanabha Iyer
, A. and Padmanabhan
,
V.N.
(2010
)
Indoor localization without the pain
.
Proceedings of the
Sixteenth Annual International Conference on Mobile
Compu-
ting and Networking
, Istanbul
, 22
-26 August 2012, 173-184.
[7]
High
accuracy indoor positioning technology solution and busi-
ness implications (2012)
http://www.cwins.wpi.edu/
[8]
Schuhmann, S.
, Herrmann
, K. and Rothermel,
K.
(2008) Im-
proved weighted centroid
localization in smart ubiquitous envi-
ronments.
Ubiquitous Intelligence and Computing. Springer
Ber-
lin Heidelberg, 20-34.
[9]
Li,
B.H
.,
Slter, J
.,
Dempster, A.G. and Rizos, C. (2006) Indoor
positioning techniques based on wireless LAN.
The
1
st IEEE
Internationa
l Conference on Wireless Broadband and Ultra Wi-
deband Communications
,
Sydney, 13-16 March 2006, 13-16.
[10]
Han, D.S., Andersen, D.G., Kaminsky, M
.,
et al.
(2009
)
Access
point localization using local signal strength gradi
ent. 10
th In-
ternational Conference
of
Passive and Active Network Mea-
surement
, Seoul
,
1-3 April 2009, 99-108.
[11]
Altintas
,
B. and Serif,
T.
(2011)
Improving RSS
-
based indoor
positioning algorithm via K
-
means clustering
.
11
th European
Wireless Conference
2011-
Sustainable Wireless Technologies
(
European Wireless
)
, 27
-
29 Apri l 201 1
,
1-5.
[12]
Zhang, R.
, Bannoura
, A. and Hoflinger,
F.
(2013)
Indoor locali-
zation using a smart phone
. 2013
IEEE
Sensors Applications
Symposium
(
SAS
), Galveston
, 19
-21 Feb
ruary
2013
,
38-42.
OPEN ACCESS
6