Modeling and Simulation
Vol.
12
No.
03
(
2023
), Article ID:
66579
,
11
pages
10.12677/MOS.2023.123290
基于模型预测控制的车辆纵向控制研究
张宇1,廖明军1*,张荣华2,黄伟东2,邵明宇1
1盐城工学院机械工程学院,江苏 盐城
2盐城市规划市政设计院有限公司,江苏 盐城
收稿日期:2023年4月8日;录用日期:2023年5月24日;发布日期:2023年5月31日

摘要
针对提高车辆对纵向速度的跟踪精度,提出了一种智能车辆速度跟踪控制方法。采用直接式控制结构对车辆纵向控制器进行设计,建立车辆的纵向动力学模型和车辆纵向速度跟踪模型,为了满足车辆行驶的平稳性和乘车人的舒适性,对加速度进行了约束,将模型预测控制(MPC)问题转换为二次规划问题求解,基于MPC算法,设计纵向运动控制器,并在CarSim和Matlab/Simulink搭建联合仿真平台,对所选取的工况进行仿真验证,结果表明提出的控制策略能够很好的实现车速跟踪,且能够保证乘车人的舒适性。
关键词
智能车辆,模型预测控制,纵向控制,联合仿真

Research on Longitudinal Control of Vehicles Based on Model Predictive Control
Yu Zhang1, Mingjun Liao1*, Ronghua Zhang2, Weidong Huang2, Mingyu Shao1
1School of Mechanical Engineering, Yancheng Engineering College, Yancheng Jiangsu
2Yancheng City Planning and Municipal Design Institute Company Limited, Yancheng Jiangsu
Received: Apr. 8th, 2023; accepted: May 24th, 2023; published: May 31st, 2023

ABSTRACT
An intelligent vehicle speed tracking control method is proposed to improve the tracking accuracy of the vehicle for longitudinal speed. The vehicle longitudinal controller is designed using a direct control structure, the longitudinal dynamics model of the vehicle and the vehicle longitudinal speed tracking model are established, the acceleration is constrained in order to meet the smoothness of the vehicle driving and the comfort of the occupants, the model predictive control (MPC) problem is converted into a quadratic programming problem to solve, the longitudinal motion controller is designed based on the MPC algorithm, and the longitudinal motion controller is designed in CarSim and The results show that the proposed control strategy can achieve good speed tracking and ensure the comfort of the occupants.
Keywords:Intelligent Vehicles, Model Predictive Control, Longitudinal Control, Joint Simulation

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着交通堵塞,环境污染越发严重,智能车辆作为智能交通的重要组成部分,相关研究和应用越来越受到关注,并已成为汽车工业领域中最具吸引力的发展方向之一。自动驾驶技术的快速发展,智能车辆不仅能提高道路交通效率,还能减少交通事故和污染。近年来,智能车辆技术得到了很大的发展,已成为全球汽车行业研究和开发的热点。作为汽车制造业和人工智能领域的一部分,智能车辆技术已经开始应用到各个领域。从近几年全球汽车市场和汽车行业的发展趋势来看,智能车辆技术将对汽车产业产生巨大影响,并有望成为未来汽车技术的主导力量。运动控制是智能车辆领域研究的核心问题之一 [1] ,有着重要意义,其主要包括横向控制、纵向控制以及横向–纵向综合协调控制车辆纵向控制。本文主要研究智能车辆的纵向运动控制研究。
纵向运动控制研究主要是对智能车辆的车速进行调节,实现车辆平稳的加减速和车辆距离保持功能。大体可分为直接式纵向控制结构和分层式纵向控制结构两种方法 [2] 。Peng Hang [3] 将传统的滑模控制理论和神经网络改为自适应滑模控制,设计了纵向运动控制器。仿真结果表明,采用自适应滑模控制器的车辆速度跟踪误差比传统滑模控制器的更小。康腾 [4] 为了提高车辆在行驶时速度变化的精度,采用分层控制方法,利用PID控制算法设计了上层控制器,方便得到车辆在车速变化过程中的加速度,下层控制器通过对制动踏板和加速踏板的控制,从而得到油气门开度和制动压力的数据。随后通过联合仿真表明,设计的控制器对车辆速度的变化有较高的控制精度。程常文 [5] 利用模型预测控制算法设计车辆纵向运动上层控制器,基于车辆纵向动力学模型设计了纵向运动的下层控制器,上层控制器是跟据前车的车速反馈得到被控车辆的期望车速,下层控制器则根据期望车速控制油门和制动踏板的力度,以达到在行驶过程中良好的跟踪能力并保持安全。文献 [6] [7] [8] [9] 采用分层控制策略,设计车辆纵向控制器,基于二自由度车辆模型,设计横向控制器,以车辆速度作为耦合点,联合横纵控制,实现了车辆在转向换道过程中也能保持良好的车速跟踪能力。清华大学的李宾洋 [10] 采用分层控制思想,在低速工况下设计纵向控制系统,设计了纵向运动控制器,通过控制油气门开度和制动踏板控制车辆加速度,保证车辆行驶的跟踪速度和车辆间距。
针对提高车辆对速度跟踪和距离保持能力,提出了一种智能车辆速度跟踪控制方法。通过建立车辆纵向动力学模型,基于模型预测控制算法,设计直接式纵向控制器,为了提高控制目标速度跟踪的精度,同时在实际驾驶过程中保证人体舒适性,避免过大的加速度和冲击度,建立车辆纵向速度跟踪模型,对目标函数和约束条件进行设计,将MPC控制问题就转换为一个二次规划求解问题,为智能车辆的纵向速度跟踪研究提供理论技术支持。
2. 车辆纵向动力学模型
因为车辆是一个十分复杂的非线性时变系统,所以在建立纵向动力学模型时,将重点放在车辆的纵向运动控制上,忽略其他因素的影响,对模型进行合理的简化,做出了以下假设 [11] (图1):
1) 假设传动结构为刚性连接;
2) 假设轮胎与地面附着力为理想力,没有侧滑力;
3) 行驶路面笔直,只考虑车辆纵向运动;
4) 忽略发动机的非线性影响。

Figure 1. Vehicle longitudinal dynamics model
图1. 车辆纵向动力学模型
根据牛顿第二定律,得到车辆的纵向动力学方程为:
(1)
其中, :车辆前轮轮胎所受纵向力; :车辆后轮轮胎所受纵向力; :空气阻力; :车前轮滚动阻力; :车后轮滚动阻力;m:整车质量; :道路的坡度。
令 ,根据公式(1)可得以下公式:
(2)
通过轮胎的受力,得轮胎力矩方程式:
(3)
(4)
其中, :空气密度(Kg/m3); :为空气阻力系数;A:迎风面积(m2); :汽车相对纵向车速(m/s); :车轴上的驱动力矩(N∙m); 、 :汽车前、后轮旋转角速度(rad/s)。 、 :汽车前、后轮牵引力(N); 、 :汽车前、后轮滚动阻力矩(N∙m); 、 :汽车前、后轮的制动力矩(N∙m); 、 :汽车前、后轴转动惯量(kg∙m2);
由 ,可得:
(5)
假设地面对轮胎的附着力很大,即忽略车辆滑移,可以得到:
(6)
驱动力矩可有下式表示:
(7)
其中, :发动机扭矩; :主减速器传动比; :变速器传动比。
假设作用在前后轴的制动力矩和滚动阻力均匀分布,令 以及 ,代入式子(5)可以得出下式:
(8)
再令 , , , 则上式(8)可以转化为下式,可得车辆纵向动力学模型:
(9)
3. 车辆纵向速度跟踪模型建立
车辆纵向控制一般针对速度控制,大多数学者论文研究都是采用一阶惯性系统来表示,表达式如下:
(10)
其中,K为常数,且 ,表示为系统的增益, 为时间常数。根据公式(10)建立连续系统状态方程:
(11)
其中, , , 为系统状态向量, 为系统控制输入。展开后表达式即为:
(12)
采用向前欧拉法,对公式(11)进行离散化,得离散系统状态方程:
(13)
其中, , ,k为当前采样时刻, 为下一刻采样时刻, 为采样时刻周期,表达式为:
(14)
在本控制系统中,一般将速度v作为系统的输出,转换为输出方程:
(15)
其中 以上就是模型预测方程的建立过程,可以通过k时刻的控制量和状态量得到 时刻的输出量。
3.1. 目标函数及约束条件的设计
在本控制系统中,控制目标是速度跟踪的精度,同时在实际驾驶过程中还要考虑人体舒适性,要避免过大的加速度和冲击度(这里用加速度变化率的绝对值来表示),因此将性能评价函数定义为 [12] :
(16)
其中, 为上一采样时刻; 为预测步长, 为控制步长; 为控制输出的预测值, 为控制输出的参考值; 表示的就是根据(k)时刻的信息来预测 时刻的值,(i)时刻最大为 ; 和 表示控制输入和控制输入增量,即加速度和加速度变化率;Q和R式权重矩阵,可以代表控制器起作用时各项的优先程度,在本式中,前者体现了跟踪精度,后者体现了控制量的平稳程度,所以最终效果则是使系统可以尽快且平稳准确地跟踪目标状态。
由于模型预测控制算法的特点,某些参数的不确定性会影响车辆纵向控制器的速度跟踪精度,导致车辆在道路行驶时的不稳定性。智能车辆纵向控制器基本参数,如表1。

Table 1. Basic parameters of intelligent vehicle longitudinal controller
表1. 智能车辆纵向控制器基本参数
为了求解的加速度能够满足滚动优化,同时满足车辆行驶的平稳性,乘车人的舒适性,对加速度进行了约束:
(17)
(18)
其中, ,分别为加速度和加速度变化率的约束。
最后整个MPC模型就建立完毕,如下:
(19)
因此基本原理就是在满足两个约束的条件下,使得性能评价函数 值最小即可。
3.2. 二次规划问题的转换
为了求解 ,需要将问题转化为标准的二次规划问题进行求解,同时为了使MPC模型对未来的状态和控制量进行预测。首先进行下列公式转化和推导。构建新的状态向量:
(20)
结合开始建立的状态方程可以得到新的状态空间表达式:
(21)
(22)
其中, , , 。
预测未来为 个时刻的,假设当前时刻为k,将该式展开可以得到:
(23)
(24)
(25)
(26)
预测未来 个时刻系统输出 :
(27)
(28)
(29)
(30)
为了方便表达,一般写成矩阵形式:
(31)
其中,
,
(32)
通过上述表达式,可以通过在 时域内的状态量 和在 时域内的控制量 计算得到下一时刻的状态量和输出量,即实现了“预测”功能。
将上述表达式代入性能评价函数中,可以得到:
(33)
其中, 。
为了方便求解,将上文中的两个约束量进行统一,易得:
(34)
所以,可以将约束量控制式转换为:
(35)
综上所述,MPC控制问题就转换为一个二次规划求解问题:
(36)
(37)
(38)
4. 车辆纵向控制器的设计
智能车辆的纵向运动就是车辆前进的方向,当车辆在道路上行驶,遇到前方有车辆时,车辆就会降低速度,保持与前车的安全距离,这个减速是通过车辆纵向控制系统增大制动踏板的压力;当前方没有车辆时,驾驶员会提高车辆速度,以便快速到达目的地,这个提高车辆的速度是通过驾驶员增大油气门的开度,使其加速度增大,从而车辆车速变快。所以,智能车辆的纵向控制系统主要是控制车辆的车速和加速度,是通过控制制动踏板压力和油气门的开度实现。智能车辆的纵向控制大致可以分为两种,一种是直接控制,另一种是分层控制。分层控制考虑因素多,本文只考虑车辆的纵向运动,不考虑其他因素,故选择直接式控制模式,根据车辆纵向动力学模型,采用模型预测控制算法,设计车辆的纵向控制器,使车辆在道路行驶时,能够平稳的前进,不紧急制动或突然加速,保证车内人员乘车的舒适性。智能车辆纵向控制结构图,如图2。
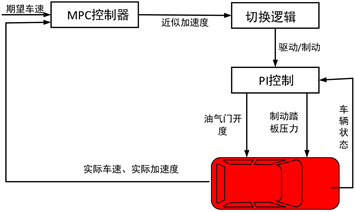
Figure 2. Intelligent vehicle longitudinal control structure
图2. 智能车辆纵向控制结构
智能车辆纵向控制结构包括MPC控制器、油气门开度和制动踏板等,通过跟踪车辆的纵向期望车速,对车辆的实际车速和实际加速度进行分析,得到近似加速度,将分析结果传给切换逻辑,当实际车速过大时,通过加大制动踏板的压力减小加速度,从而减速,当实际车速过小时,通过增大油气门开度,增大车辆的加速度,以此使车辆速度增加。
4.1. 仿真平台的设计
通过Carsim和MATLAB/Simulink搭建车辆纵向控制仿真模型,在联合仿真环境下对纵向控制器进行仿真验证。选取具有代表性的路况,即双移线道路工况,随后对车辆在双移线运动进行仿真验证。车辆纵向控制仿真模型结构图,如下图3所示。
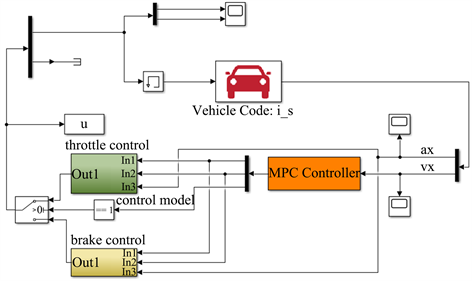
Figure 3. Vehicle longitudinal control simulation model diagram
图3. 车辆纵向控制仿真模型结构图
在CarSim中设置车辆的行驶速度、制动控制、挡位控制、路面参数和其他部分。本文选用整车模型D-Class SUV,选取具有代表性的双移线道路工况,随后对车辆在双移线运动进行仿真验证。针对本文纵向速度跟踪控制,驱动控制和制动控制设置为无;由于本文不考虑横向控制,所以转向盘输入设定为“Drive path follower”;仿真道路设置为“3 km, Mu = 0.9, one lane”,仿真时间为120 s。
因为智能车辆纵向的纵向运动控制是通过控制车辆的油气门开度和制动踏板压力大小变化,从而实现对车辆的车速和加速度进行控制,所以故CarSim仿真输入接口有2个,分别是油气门开度和制动踏板压力。输出口也要有两个变量,分别是输出质心车速和加速度。
4.2. 仿真结果分析
使用Carsim和MATLAB/Simulink联合仿真搭建了MPC车辆纵向控制器,并对仿真工况的车速跟踪与加速度变化做出了综合评价。为了验证MPC纵向控制器的有效性,设计了双移线道路工况进行仿真验证。
从图4可以看出是智能车辆纵向车速跟踪变化曲线,其中红色虚线代表车辆期望速度,蓝色实线代表车辆实际速度,可以清楚的观察到车辆能够很好的进行速度跟踪,平稳的行驶且误差值很小,实现了车辆的纵向运动控制,从图中还可以观察到最大加速度不超过0.3 g,最大减速度不超过0.4 g,符合控制量约束。
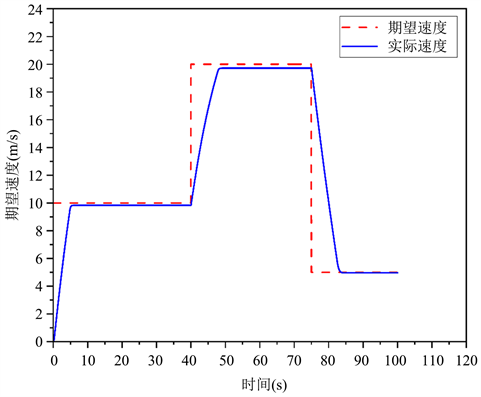
Figure 4. Vehicle longitudinal speed tracking change curve
图4. 车辆纵向速度跟踪变化曲线
从智能车辆的加速度变化曲线,如图5所示,可以清楚的看出,在智能车辆行驶运动的整个过程中,加速度变化在很小的范围,车辆在进行车速跟踪时,没有出现过特别大的加速度,在减速过程,加速度变化也很小,说明了设计的智能车辆纵向控制器能够很好的控制油气门开度和制动踏板的压力变化,实现很好的加速度控制,使乘车人能够感觉到良好的舒服性,满足汽车在生活中实际需求。从图中还可以看出,在整个车辆行驶过程中,车辆没有出现频繁的加速或减速,减少了车辆在切换行驶模式时给车辆带来的冲击,提高了车辆行驶的稳定性和舒适,同时也提高了车辆的使用年限,减轻零件的受损。

Figure 5. Acceleration variation curve
图5. 加速度变化曲线
5. 结论
本文依据车辆纵向动力学模型,为智能车辆纵向控制打下基础,同时构建车辆纵向速度跟踪模型,随后基于模型预测控制算法,设计车辆纵向控制器,再搭建CarSim-Matlab/Simulink联合仿真平台,最后通过仿真平台对选取的双移线工况进行模拟仿真,仿真结果表明,提出的控制策略能够很好的实现车速跟踪,减少了车辆的加速度切换次数,制动系统和驱动系统得到了有效控制,同时提高了车辆行驶的稳定性,保证了乘车人的舒适性。
基金项目
盐城工学院研究生科研与实践创新计划项目(SJCX21_XY028);盐城市创新创业领军人才项目(yccx2019219);盐城工学院校级科研项目资助(xjr2019029);江苏省产学研合作项目(BY2022458)。
文章引用
张 宇,廖明军,张荣华,黄伟东,邵明宇. 基于模型预测控制的车辆纵向控制研究
Research on Longitudinal Control of Vehicles Based on Model Predictive Control[J]. 建模与仿真, 2023, 12(03): 3151-3161. https://doi.org/10.12677/MOS.2023.123290
参考文献
- 1. 谯艳娟, 李以农, 李应全. 模糊控制在汽车制动纵向控制中的应用[J]. 汽车研究与开发, 2003(3): 25-29.
- 2. 熊璐, 杨兴, 卓桂荣, 冷搏, 章仁夑. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143.
- 3. Peng, H., et al. (2018) Longitudinal Velocity Tracking Control of a 4WID Electric Vehicle The authors would appreciate the Financial Support from the National Natural Science Foundation of China (U1564207). IFAC Papers OnLine, 51, 790-795. https://doi.org/10.1016/j.ifacol.2018.10.129
- 4. 康腾. 基于遗传算法的智能驾驶车辆纵向PID控制研究[J]. 汽车文摘, 2022(10): 52-56.
- 5. 程常文. 智能车辆横纵向控制方法研究[D]: [硕士学位论文]. 长沙: 湖南大学, 2019.
- 6. 邓涛, 李鑫. 智能车辆横纵向运动综合控制方法研究[J]. 重庆交通大学学报(自然科学版), 2021, 40(4): 133-140.
- 7. 史鸿枫, 刘明春, 黄菊花. 智能电动车辆横纵向协同运动控制[J]. 南昌大学学报(工科版), 2021, 43(1): 62-72.
- 8. 黄升宇. 基于模糊MPC算法的自适应巡航控制系统研究[D]: [硕士学位论文]. 长沙: 湖南大学, 2012.
- 9. 谢辉, 刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. 汽车安全与节能学报, 2019, 10(3): 326-333.
- 10. 李宾洋, 李克强, 王建强, 等. 低速行驶重型车辆的动力学系统建模与非线性控制[J]. 自动化学报, 2007, 33(3): 265-272.
- 11. Takasaki, G. and Fenton, R. (1977) On the Identification of Vehicle Longitudinal Dynamics. IEEE Transactions on Automatic Control, 22, 610-615. https://doi.org/10.1109/TAC.1977.1101569
- 12. Miller, C., Pek, C. and Althoff, M. (2018) Efficient Mixed-Integer Programming for Longitudinal and Lateralmotion Planning of Autonomous Vehicles. 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, 26-30 June 2018, 1954-1961. https://doi.org/10.1109/IVS.2018.8500394
NOTES
*通讯作者。