 Journal of Aerospace Science and Technology 国际航空航天科学, 2013, 1, 13-18 http://dx.doi.org/10.12677/jast.2013.13003 Published Online December 2013 (http://www.hanspub.org/journal/jast) Open Access 13 A Double Station Time Difference Location Method Based on Function Relationship between Phase Shift and Doppler Shift Tao Yu Shanghai Research Institute of Microwave Equipment, Shanghai Email: 18001648180@163.com Received: Nov. 21st, 2013; revised: Dec. 6th, 2013; accepted: Dec. 16th, 2013 Copyright © 2013 Tao Yu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accordance of the Creative Commons Attribution Li- cense all Copyrights © 2013 are reserved for Hans and the owner of the intellectual property Tao Yu. All Copyright © 2013 are guarded by law and by Hans as a guardian. Abstract: This paper presents a location algorithm which can help to improve existing performance of multistation time difference location based on the function relationship among phase shift, Doppler shift and time difference. New me- thod uses the relationship between phase difference and time difference based on the function transforms from Doppler shift into phase shift. Finally, the ranging formula that only can apply to airborne platform can be translated into the double station time difference location method which is not associated with the motion state of detection platform. As compared to existing three stations time difference location method in two-dimension plane, the double station time difference location method can heighten measurement accuracy and avoid the time difference ambiguity introduced by high PRF signal. At the same time, it also has the characteristics that the time reference between two major base stations can be deranged, and that looking for the building position of base station is more convenient. Simulation result proves the availability of the algorithm. Keywords: Multistation Time Difference Location; Phase Difference Location; Doppler Location; Ranging; Airborne Passive Location 一种基于相频函数关系的双基时差定位方法 郁 涛 上海微波设备研究所,上海 Email: 18001648180@163.com 收稿日期:2013 年11 月21 日;修回日期:2013年12 月6日;录用日期:2013 年12月16 日 摘 要:基于相、频、时三者之间的函数关系,提出了一种有助于改善现有多站时差无源定位性能的定位算法。 相对于现有的平面三站时差定位方法,这种先通过频移到相差的函数变换,再利用相差和时差间的关系,将原 先仅能用于机载的测距公式转化为与探测平台运动状态无关的双基时差定位方法具有更高的测量精度,避免了 对高重频信号测量的定位解模糊,同时相距较远的两主基站间的时间基准可以要求不同步,这无疑有利于站址 的选择。仿真结果验证了该算法的有效性。 关键词:多站时差定位;相差定位;多普勒定位;测距;机载无源定位 1. 引言 根据现有的多站时差定位的误差分析理论,为了 获得较高的时差定位精度,时差定位系统的站间的基 线长度必须足够的长,一般需要大于十几公里,由此, 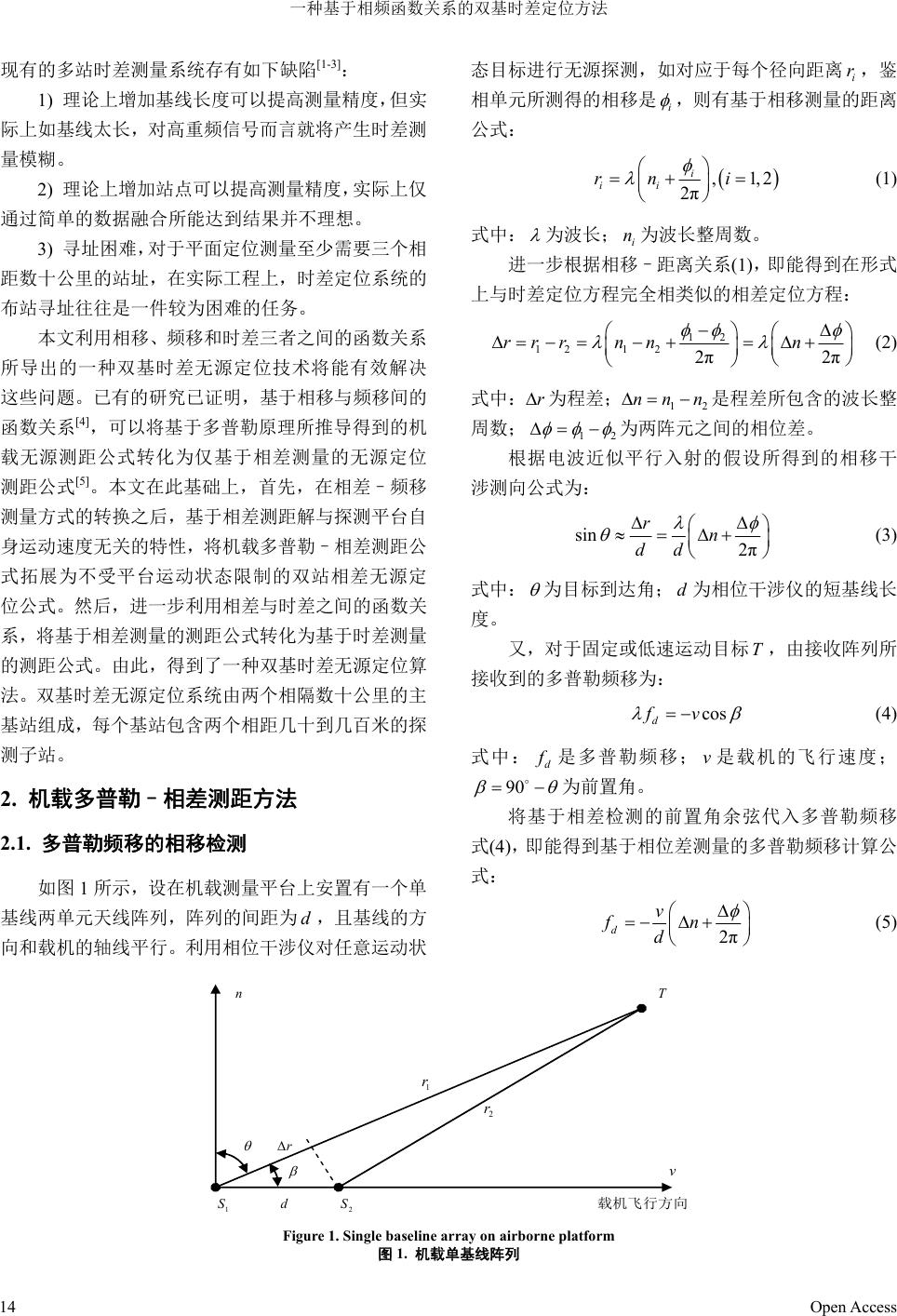 一种基于相频函数关系的双基时差定位方法 Open Access 14 现有的多站时差测量系统存有如下缺陷[1-3]: 1) 理论上增加基线长度可以提高测量精度,但实 际上如基线太长,对高重频信号而言就将产生时差测 量模糊。 2) 理论上增加站点可以提高测量精度,实际上仅 通过简单的数据融合所能达到结果并不理想。 3) 寻址困难,对于平面定位测量至少需要三个相 距数十公里的站址,在实际工程上,时差定位系统的 布站寻址往往是一件较为困难的任务。 本文利用相移、频移和时差三者之间的函数关系 所导出的一种双基时差无源定位技术将能有效解决 这些问题。已有的研究已证明,基于相移与频移间的 函数关系[4],可以将基于多普勒原理所推导得到的机 载无源测距公式转化为仅基于相差测量的无源定位 测距公式[5]。本文在此基础上,首先,在相差–频移 测量方式的转换之后,基于相差测距解与探测平台自 身运动速度无关的特性,将机载多普勒–相差测距公 式拓展为不受平台运动状态限制的双站相差无源定 位公式。然后,进一步利用相差与时差之间的函数关 系,将基于相差测量的测距公式转化为基于时差测量 的测距公式。由此,得到了一种双基时差无源定位算 法。双基时差无源定位系统由两个相隔数十公里的主 基站组成,每个基站包含两个相距几十到几百米的探 测子站。 2. 机载多普勒–相差测距方法 2.1. 多普勒频移的相移检测 如图 1所示,设在机载测量平台上安置有一个单 基线两单元天线阵列,阵列的间距为 d,且基线的方 向和载机的轴线平行。利用相位干涉仪对任意运动状 态目标进行无源探测,如对应于每个径向距离 i r,鉴 相单元所测得的相移是 i ,则有基于相移测量的距离 公式: ,1,2 2π i ii rn i (1) 式中: 为波长; i n为波长整周数。 进一步根据相移–距离关系(1),即能得到在形式 上与时差定位方程完全相类似的相差定位方程: 12 121 22π2π rrr nnn (2) 式中: r 为程差; 12 nnn 是程差所包含的波长整 周数; 12 为两阵元之间的相位差。 根据电波近似平行入射的假设所得到的相移干 涉测向公式为: sin 2π rn dd (3) 式中: 为目标到达角; d为相位干涉仪的短基线长 度。 又,对于固定或低速运动目标 T,由接收阵列所 接收到的多普勒频移为: cos d fv (4) 式中: d f 是多普勒频移; v是载机的飞行速度; 90 为前置角。 将基于相差检测的前置角余弦代入多普勒频移 式(4),即能得到基于相位差测量的多普勒频移计算公 式: 2π dv fn d (5) n T 1 r 2 r r v 1 S d 2 S 载机飞行方向 Figure 1. Single baseline array on airborne platform 图1. 机载单基线阵列 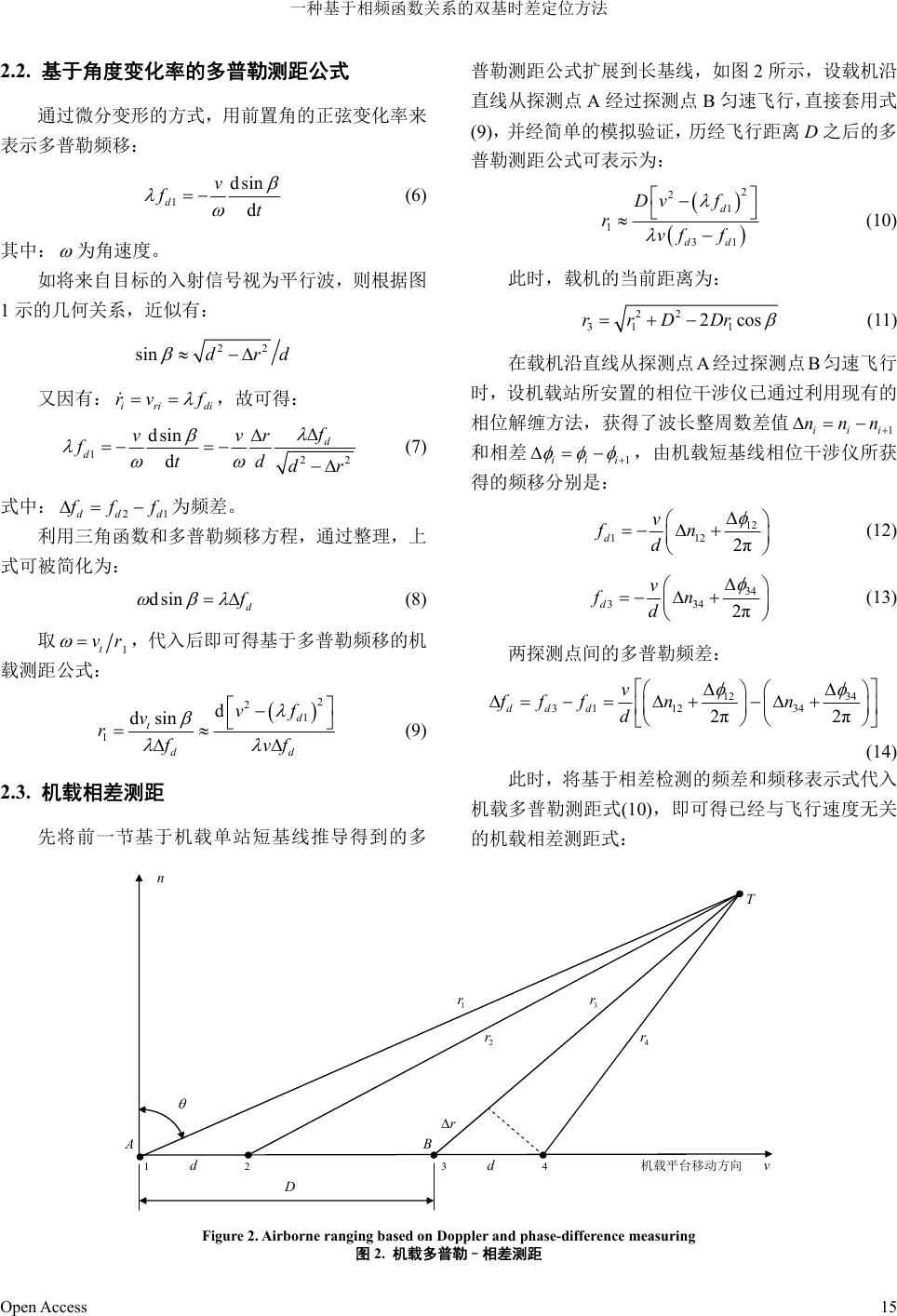 一种基于相频函数关系的双基时差定位方法 Open Access 15 2.2. 基于角度变化率的多普勒测距公式 通过微分变形的方式,用前置角的正弦变化率来 表示多普勒频移: 1 dsin d dv ft (6) 其中: 为角速度。 如将来自目标的入射信号视为平行波,则根据图 1示的几何关系,近似有: 22 sin drd 又因有: iridi rv f ,故可得: 122 dsin d d d f vvr ftd dr (7) 式中: 21dd d f ff 为频差。 利用三角函数和多普勒频移方程,通过整理,上 式可被简化为: dsin d f (8) 取1 t vr ,代入后即可得基于多普勒频移的机 载测距公式: 2 2 1 1 d dsin d t dd vf v rfvf (9) 2.3. 机载相差测距 先将前一节基于机载单站短基线推导得到的多 普勒测距公式扩展到长基线,如图 2所示,设载机沿 直线从探测点A经过探测点 B匀速飞行,直接套用式 (9),并经简单的模拟验证,历经飞行距离D之后的多 普勒测距公式可表示为: 2 2 1 1 31 d dd Dv f rvf f (10) 此时,载机的当前距离为: 22 31 1 2cosrrDDr (11) 在载机沿直线从探测点 A经过探测点 B匀速飞行 时,设机载站所安置的相位干涉仪已通过利用现有的 相位解缠方法,获得了波长整周数差值 1iii nnn 和相差 1iii ,由机载短基线相位干涉仪所获 得的频移分别是: 12 112 2π dv fn d (12) 34 334 2π dv fn d (13) 两探测点间的多普勒频差: 34 12 3 11234 2π2π dd d vnn d fff (14) 此时,将基于相差检测的频差和频移表示式代入 机载多普勒测距式(10),即可得已经与飞行速度无关 的机载相差测距式: n T 1 r 3 r 2 r 4 r r A B 1 d 2 3 d 4 机载平台移动方向 v D Figure 2. Airborne ranging based on Doppler and phase-difference measuring 图2. 机载多普勒–相差测距 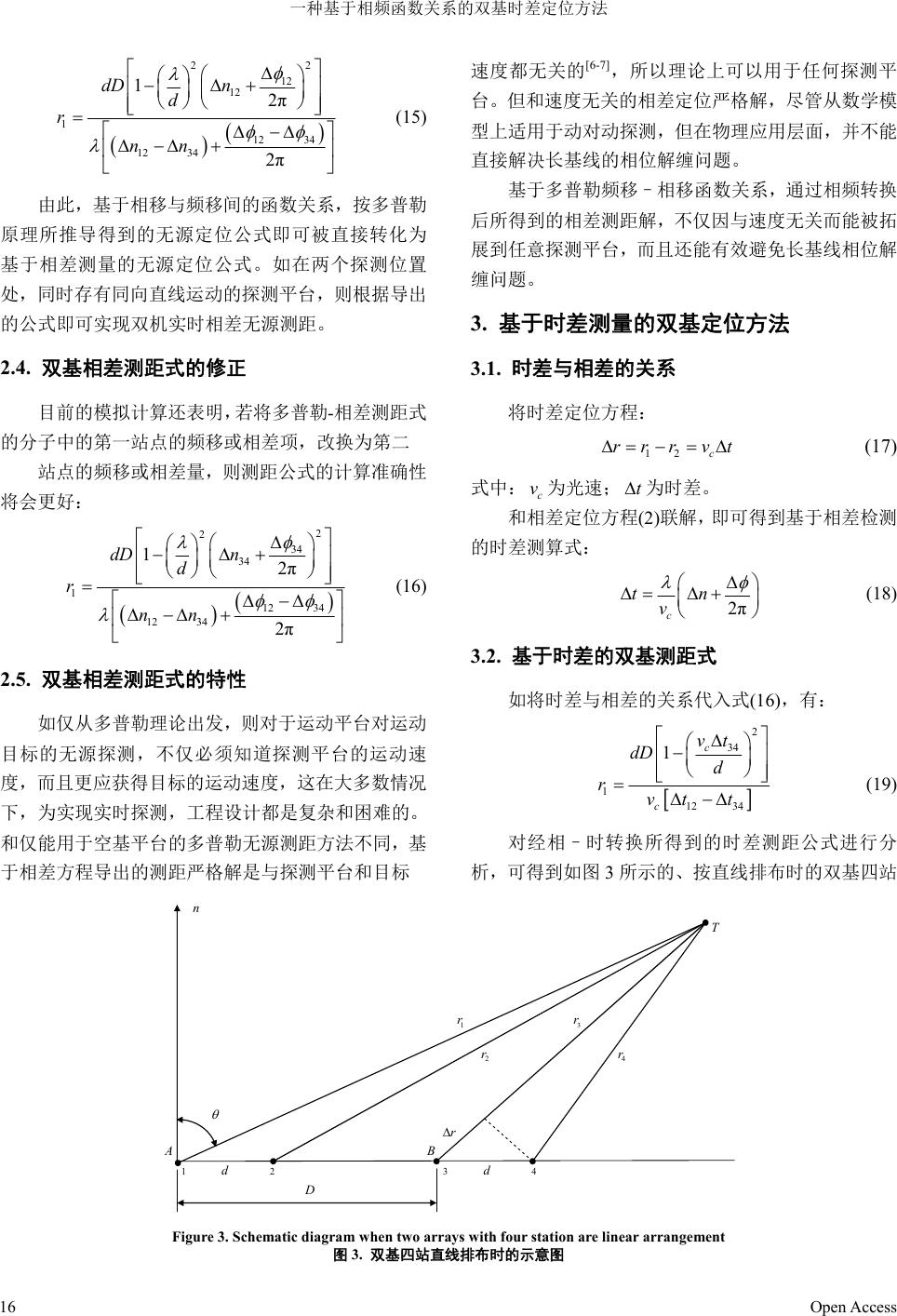 一种基于相频函数关系的双基时差定位方法 Open Access 16 2 2 12 12 1 12 34 12 34 12π 2π dD n d r nn (15) 由此,基于相移与频移间的函数关系,按多普勒 原理所推导得到的无源定位公式即可被直接转化为 基于相差测量的无源定位公式。如在两个探测位置 处,同时存有同向直线运动的探测平台,则根据导出 的公式即可实现双机实时相差无源测距。 2.4. 双基相差测距式的修正 目前的模拟计算还表明,若将多普勒-相差测距式 的分子中的第一站点的频移或相差项,改换为第二 站点的频移或相差量,则测距公式的计算准确性 将会更好: 2 2 34 34 1 12 34 12 34 12π 2π dD n d r nn (16) 2.5. 双基相差测距式的特性 如仅从多普勒理论出发,则对于运动平台对运动 目标的无源探测,不仅必须知道探测平台的运动速 度,而且更应获得目标的运动速度,这在大多数情况 下,为实现实时探测,工程设计都是复杂和困难的。 和仅能用于空基平台的多普勒无源测距方法不同,基 于相差方程导出的测距严格解是与探测平台和目标 速度都无关的[6-7],所以理论上可以用于任何探测平 台。但和速度无关的相差定位严格解,尽管从数学模 型上适用于动对动探测,但在物理应用层面,并不能 直接解决长基线的相位解缠问题。 基于多普勒频移–相移函数关系,通过相频转换 后所得到的相差测距解,不仅因与速度无关而能被拓 展到任意探测平台,而且还能有效避免长基线相位解 缠问题。 3. 基于时差测量的双基定位方法 3.1. 时差与相差的关系 将时差定位方程: 12 c rrr vt (17) 式中: c v为光速; t 为时差。 和相差定位方程(2)联解,即可得到基于相差检测 的时差测算式: 2π c tn v (18) 3.2. 基于时差的双基测距式 如将时差与相差的关系代入式(16),有: 2 34 1 12 34 1c c vt dD d rvt t (19) 对经相–时转换所得到的时差测距公式进行分 析,可得到如图3所示的、按直线排布时的双基四站 n T 1 r 3 r 2 r 4 r r A B 1 d 2 3 d 4 D Figure 3. Schematic diagram when two arrays with four station are linear arrangement 图3. 双基四站直线排布时的示意图  一种基于相频函数关系的双基时差定位方法 Open Access 17 时差无源定位系统的示意图。 3.3. 模拟验证 根据图 3所示的几何关系,预先设定径向距离1 r、 基站内两探测站之间的基线长度 d、两基站距离 D, 并使到达角在规定的范围内0,90 线性变化,随后 由三角函数关系依次解出其余的径向距离和前置角。 在此基础上,计算出时差的理论值: ij ij c rr tv (20) 将其代入双基时差测距公式(19),并将计算结果 和理论值比较得到相对计算误差: 100% a rr r (21) 其中:下标a表示测算解。 图4给出了不同站间距离时的相对计算误差曲 线,从中可以看到相对计算误差与基站的站间距离成 正比。模拟计算表明,相对计算误差主要与基站的站 间距离相关,基站内两探测站间的基线长度对相对计 算误差影响较小。测算所用的基本参数都已标注在曲 线图中。 4. 误差分析 4.1. 误差方程 用全微分方法分析由时差测量误差所产生的测 010 20 30 4050 60 70 8090 0 1 2 3 4 5 6 7 8 到达角 θ / (°) 相对计算误差 ε r / (%) D = 500 m D = 1000 m D = 1500 m r 1 = 100 km d = 500 m Figure 4. The relative calculation error for different distance be- tween the stations 图4. 不同基站间距离时的相对计算误差 距误差,忽略间距D等因数产生的测量误差,有: 12 34 dd d rr rtt tt (22) 设: 2 34 1c vt Pd 12 34 ttQ 即有: 1 c dD P rvQ 距离对各时差的微分是: 2 1212 12 1 12 12 1 c c rdD PQ QP ttt vQ dD PQ r Qv tt 2 3434 34 1 34 34 1 c c rdD PQ QP ttt vQ dD PQ r Qv tt 其中: 12 0 P t , 2 34 34 2c v Pt td , 12 1 Q , 34 1 Q 。 当各观察量的误差都是零均值,相互独立而标准 差为 时,相对测距误差公式为: 12 34 dt rrr rr tt (23) 其中: 100 ns t 为时差测量误差的均方根值。 图5给出了不同探测站间距离时的相对测量误差 010 20 3040 50 60 7080 0 1 2 3 4 5 6 7 8 9 10 到达角 θ / (°) 相对测量误差 σ r / (%) d = 1000 m d = 500 m r 1 = 100 km D = 10 km σ t = 100 ns Figure 5. Relative measurement error curve for different distance between the stations 图5. 不同站间间距时的相对测量误差曲线 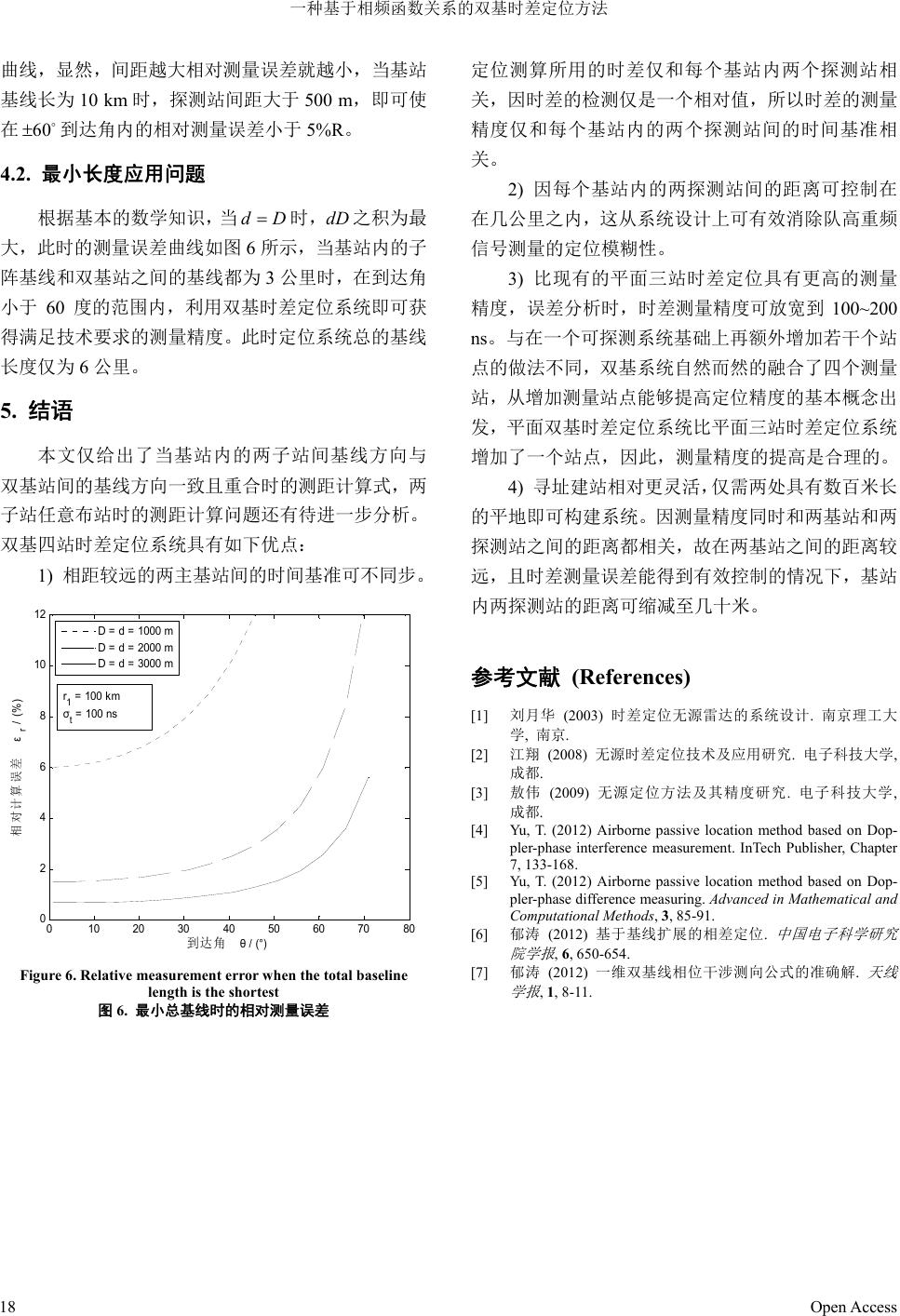 一种基于相频函数关系的双基时差定位方法 Open Access 18 曲线,显然,间距越大相对测量误差就越小,当基站 基线长为 10 km时,探测站间距大于 500 m,即可使 在60到达角内的相对测量误差小于5%R。 4.2. 最小长度应用问题 根据基本的数学知识,当dD时,dD 之积为最 大,此时的测量误差曲线如图6所示,当基站内的子 阵基线和双基站之间的基线都为3公里时,在到达角 小于 60 度的范围内,利用双基时差定位系统即可获 得满足技术要求的测量精度。此时定位系统总的基线 长度仅为6公里。 5. 结语 本文仅给出了当基站内的两子站间基线方向与 双基站间的基线方向一致且重合时的测距计算式,两 子站任意布站时的测距计算问题还有待进一步分析。 双基四站时差定位系统具有如下优点: 1) 相距较远的两主基站间的时间基准可不同步。 010 20 3040 50 60 7080 0 2 4 6 8 10 12 到达角 θ / (°) 相对计算误差 ε r / (%) D = d = 1000 m D = d = 2000 m D = d = 3000 m r 1 = 100 km σ t = 100 ns Figure 6. Relative measurement error when the total baseline length is the shortest 图6. 最小总基线时的相对测量误差 定位测算所用的时差仅和每个基站内两个探测站相 关,因时差的检测仅是一个相对值,所以时差的测量 精度仅和每个基站内的两个探测站间的时间基准相 关。 2) 因每个基站内的两探测站间的距离可控制在 在几公里之内,这从系统设计上可有效消除队高重频 信号测量的定位模糊性。 3) 比现有的平面三站时差定位具有更高的测量 精度,误差分析时,时差测量精度可放宽到 100~200 ns。与在一个可探测系统基础上再额外增加若干个站 点的做法不同,双基系统自然而然的融合了四个测量 站,从增加测量站点能够提高定位精度的基本概念出 发,平面双基时差定位系统比平面三站时差定位系统 增加了一个站点,因此,测量精度的提高是合理的。 4) 寻址建站相对更灵活,仅需两处具有数百米长 的平地即可构建系统。因测量精度同时和两基站和两 探测站之间的距离都相关,故在两基站之间的距离较 远,且时差测量误差能得到有效控制的情况下,基站 内两探测站的距离可缩减至几十米。 参考文献 (References) [1] 刘月华 (2003) 时差定位无源雷达的系统设计. 南京理工大 学, 南京. [2] 江翔 (2008) 无源时差定位技术及应用研究. 电子科技大学, 成都. [3] 敖伟 (2009) 无源定位方法及其精度研究. 电子科技大学, 成都. [4] Yu, T. (2012) Airborne passive location method based on Dop- pler-phase interference measurement. InTech Publisher, Chapter 7, 133-168. [5] Yu, T. (2012) Airborne passive location method based on Dop- pler-phase difference measuring. Advanced in Mathematical and Computational Methods, 3, 85-91. [6] 郁涛 (2012) 基于基线扩展的相差定位. 中国电子科学研究 院学报 , 6, 650-654. [7] 郁涛 (2012) 一维双基线相位干涉测向公式的准确解. 天线 学报 , 1, 8-11. |