Computer Science and Application
Vol.
10
No.
06
(
2020
), Article ID:
36076
,
15
pages
10.12677/CSA.2020.106125
Design and Development of Remote Monitoring Platform Software for High-Load Electric Vehicles Based on 4G Communication
Cheng Wang, Fangjie Chen, Chenlong Kang, Yongfeng Zhang
Ordnance NCO Academy, Army Engineering University, Wuhan Hubei

Received: May 27th, 2020; accepted: Jun. 5th, 2020; published: Jun. 12th, 2020

ABSTRACT
In the context of the expanding market size of electric vehicles and the continuous increase in the penetration rate of pre-loaded connected equipment, it’s an important part of forming an intelligent connected vehicle ecosystem that targeted developing a vehicle remote monitoring platform that integrates data monitoring and remote management functions. This paper designs and develops a remote monitoring platform for electric vehicles based on 4G communication technology and mainly uses the Go programming language to complete data processing. Starting from the overall platform architecture design, load balancing is implemented in combination with the hardware and software level during the development process, so that the platform can effectively deal with the simultaneous access of a large number of terminals and highly concurrent data processing and management, and realize remote monitoring of vehicle data. Finally, after joint software and hardware testing and verification, the overall operation of the platform is stable, which can realize remote monitoring of connected vehicles and provide support for the development of related remote services.
Keywords:Remote Monitoring Platform, Electric Vehicle, Load Balancing, Go Language

基于4G通信的高负载电动汽车远程监控平台 软件设计与开发
王 成,陈方杰,康辰龙,张永峰
陆军工程大学军械士官学校,湖北 武汉

收稿日期:2020年5月27日;录用日期:2020年6月5日;发布日期:2020年6月12日

摘 要
在电动汽车的市场规模不断扩大的环境以及前装车联网设备渗透率持续增长的态势下,针对性开发集数据监控和远程管理功能于一体的车辆远程监控平台,是组建智能网联汽车生态圈中的重要一环。本文设计并开发了一种基于4G通信技术,并主要利用Go编程语言完成数据处理的电动汽车远程监控平台。从整体平台架构设计出发,开发过程中结合软硬件层面实施负载均衡,使平台可以有效应对大量终端的同时接入,并满足高并发数据处理及管理的需求,实现对车辆数据的远程监控。最后,经过软硬件联合测试验证,平台总体运行稳定,可对接入车辆实现远程监控,并为相关远程服务的开发提供支持。
关键词 :远程监控平台,电动汽车,负载均衡,Go语言

Copyright © 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
目前,5G通信技术仍处于加速架设的进程中,并未全面商用,车联网产业的发展受到一定程度的制约。尤其是对于车路协同、自动驾驶、智慧交通系统等前沿方向的研究,高度依赖高带宽、低时延的先进通信网络 [1]。因此,现阶段车联网技术的推进,更多的是聚焦于车辆的“网联化”,在获取车辆数据的基础上,提供对网络状况无苛刻要求的相关远程服务。如今,基于车载终端等车联网硬件设备的前装,对于车辆的数据采集具有极大的促进作用,丰富的数据样本不仅能为车辆的研发提供实质性的参考依据,还能对实时监控的车辆提供故障诊断方案、售后服务等扩展功能。同时,基于充足样本的大数据挖掘应用,将会极大促进人机交互以及辅助驾驶方面的研究 [2]。然而不论是从数据管理或是数据应用场景挖掘的角度来看,都需要以远程监控平台作为载体 [3]。多终端的同时接入以及高并发的数据传输也将对平台产生巨大的压力,因此对平台在高负载环境下的负载均衡能力及稳定性提出了较高的要求。平台的扩展性及适应性也决定了其能否广泛运用于不同场景,将此特性贯穿于设计与开发的过程,也将为后续的开发提供便利。当前,诸如汽车分时租赁、远程车辆故障诊断等基于车辆监控数据的车联网服务,在多终端接入场景下的系统稳定性面临着较大的挑战。而能够较好应对高负载压力的服务平台,大多是以目标功能为导向的设计开发,整体系统可移植性有限,在未来进行功能扩展或二次开发时将增加开发成本及周期 [4]。因此,在5G通信技术尚未完全铺开的环境下,本文基于成熟的4G通信技术设计开发的车辆远程监控平台是一种能满足对车辆数据进行精确采集,且可移植于不同应用服务系统的方案,在一定程度上提升开发的效率。
2. 电动汽车远程监控平台整体架构
目前,基于车联网的远程监控技术主要覆盖“端、管、云”3个层面。“端”是指前装于车辆的车载终端及相关汽车电子;“管”包括诸如4G、5G车载蜂窝通信等无线通信技术;“云”则是基于数据驱动的应用开发 [5]。本文设计开发的电动汽车远程监控平台依据上述的技术范畴,从宏观角度将其架构划分为车载终端、数据处理系统、管理端及数据应用接口四个部分。其主要结构如图1所示。
1) 车载终端
出于成本的考虑,现今主流的电动汽车在整车数据通信部分依然是采用非常成熟的CAN总线系统,这也给原始数据的采集带来了较大的便利性。市面上的车载终端一般通过OBD接口与各ECU进行通信,以实现车辆在行驶、充电和驻车环境下的数据的获取,同时负责数据的转码、加密和组包。
2) 数据处理系统
数据处理系统主要由服务器和数据库组成。被车载终端处理完成的数据包通过4G无线网络,按照TCP/IP协议的要求,上传至服务器的对应端口。服务器端按照编译的流程,对数据包的字段进行解析和预处理,生成以时间为序列且可读的原始数据表,并最终交由数据库存储,以供后期数据调用。
3) 管理端
管理员可以运用跨平台的管理系统实现对远程监控平台的管理。管理端通过唯一预设的API与数据处理系统进行通信及执行数据调用,保证了整体平台的安全性。同时,具有权限的管理员均能通过身份验证的方式在管理端进行操作,提高了管理端的使用便利性。
4) 数据应用接口
在数据处理系统中预留数据应用接口,在管理端开放使用权限即可接入并获取车辆数据,以供不同场景下的应用及服务。
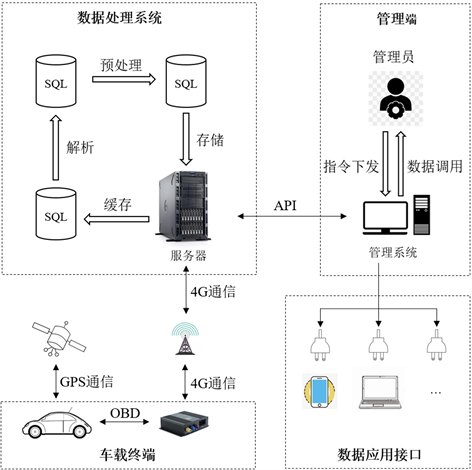
Figure 1. Architecture of remote monitoring platform for electric vehicles
图1. 电动汽车远程监控平台架构
3. 电动汽车远程监控平台软件设计
为了提高远程监控平台的应用适应性,数据处理系统采用B/S (Browser/Server)与C/S (Client/Server)混合型架构,即浏览器/服务器与客户端/服务器结合的模式,以B/S架构为主。B/S架构的逻辑为:在前端进行的处理操作,主要的业务逻辑都交由后台来处理操作,前端仅负责请求、渲染等少量逻辑处理。其特点在于无需安装特定的客户端,只需要web浏览器的支持就可以在管理系统上完成一系列的操作,不受操作系统的限制,适应性强 [6]。而对于云平台延伸功能,诸如移动终端(APP)显示、车载终端与平台交互等功能,由于其对丰富界面和操作以及快速响应的要求,则采用只有一层交互的C/S架构。
B/S架构主要将系统划分为三个部分,分别为表现层、逻辑层和数据层。表现层负责处理客户端请求,完成与后台的通信,并显示输出处理结果 [7]。逻辑层负责处理业务逻辑,与数据库完成数据交互。数据层负责接受请求,对数据内容进行运算处理,并返回处理的结果。由于云平台部分的整体系统架构主要采用的是B/S模式,因此本文以B/S架构的结构形式作为依据,对数据处理系统进行软件设计。
3.1. 表现层
表现层即远程监控平台中的管理系统,是访客或管理人员直接在系统进行操作的入口。对于表现层而言,其任务是将监控数据以功能模块的形式,直观的呈现给管理人员,并具备将指定数据以列表形式导出的功能。其主要功能可预设为管理账户登录与注册、车辆数据监控、故障报警、车载终端管理及数据查询等5个模块。关于表现层模块层级关系可由图2所示。

Figure 2. Design of presentation module
图2. 表现层模块设计
3.2. 逻辑层
逻辑层部分主要是处理相关的业务逻辑。对于云平台而言,需要处理的业务逻辑分为两类,一类为管理系统即前端的各项操作指令,另一类为后台对上传数据处理。
对于处理前端操作指令的业务逻辑,主要是对数据库接口的调用。无论是车辆数据的查询或是相关信息的编辑管理,本质上是对数据库中存储的数据进行调用。而逻辑层需要完成的工作就是针对各个功能模块要呈现给客户端信息,对需要调用的数据信息做决策,最后从数据库开放的接口调用所需的数据,实现对采集数据和录入数据的增删查改。同时,对于访客的登录登出等操作,须完成用户信息的比对校验工作。
对于实时数据的处理属于默认的业务逻辑,同时也时数据处理系统最核心的功能。数据处理系统首先需要与车载终端建立通信连接,完成车载终端在对应端口上的登录和身份验证,随后开始接收上传的实时数据。当接收到上传数据后,第一步进行数据包的校验,查看数据包是否完整。若不完整则向车载终端返回数据补发命令,并舍弃不完整数据包。校验成功的数据包则交由解析模块进行处理,按照TCP/IP协议内容进行解包,将数据包还原成可读形式的数据信息,再对数据进行预处理,筛去异常值,最后交由数据库进行管理。
而就逻辑层的整体需求来看,其最主要的就是处理高并发负载。云平台与多台车载终端连接,且车辆运行时数据上传频率较高,因此会造成服务器的高负载压力。逻辑层采用的编译语言、处理机制以及服务器架构都需要配合高并发的工作模式,保证整体系统的良好运行以及数据的精准管理。
3.3. 数据层
数据层即数据库部分,数据库主要的工作是对解析完成的实时数据进行存储、管理及调用。存储工作即将服务器端接收的数据存储至服务器端,为数据调用或云计算提供支持。管理工作则是依靠数据库管理系统,负责数据的组织、操作、维护、控制及保护,为数据库系统的核心部分。为了便于数据的调用,还需要对数据进行分类管理并建立索引目录。调用工作是为外部命令提供数据调用接口,以实时数据作为核心内容为客户端提供相应的服务。
综上所述,远程监控平台软件部分的核心就是逻辑层和数据层的设计,平台架构层面即表现为数据处理系统和管理端的开发。
4. 数据处理系统及管理端的开发
4.1. 整体架构
数据处理系统和管理端由硬件和软件两部分构成。硬件部分主要包括无线网络设备和服务器,软件部分则包括操作系统、编程语言和数据库。
考虑到数据处理系统需要同时处理平台与车载终端之间上下行的数据传输,且多终端的同时接入带来的高并发访问压力,仅通过软件层面的负载均衡会给开发带来较大的难度。为保证系统运行的稳定性以及后期扩展性,这里采用“一主多从”的服务器架构。在主服务器宕机时,可将任务切换到从服务器上进行处理,这种模式也将大大提高系统的可靠性 [8]。其物理架构如图3所示。
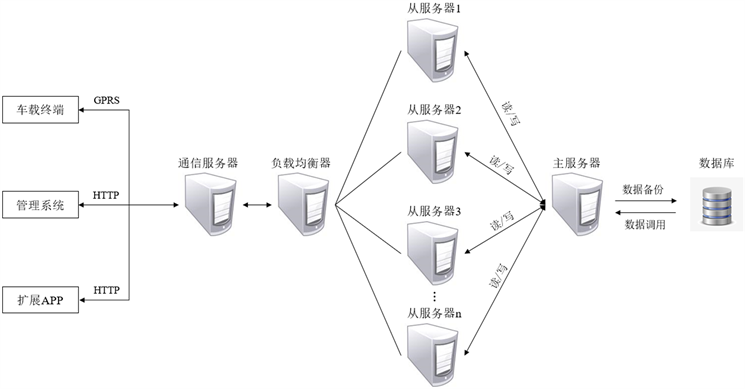
Figure 3. Server physical architecture
图3. 服务器物理架构
软件部分开发技术及相关工具如表1所示。

Table 1. Software development technology and tools
表1. 软件部分开发技术及工具
数据处理系统主要的功能以数据包解析、数据库管理为核心进行开发。因此,系统整体结构可分为数据解析和数据管理及调用两大主要板块。同时,数据解析部分是基础,是为数据管理及调用部分服务,整体系统的根本目的是实现对实时数据的管理及调用。远程监控平台系统主程序架构如图4。

Figure 4. Main program framework of remote monitoring platform
图4. 远程监控平台主程序架构
4.2. 主程序设计开发
数据处理系统及管理端均采用基于PHP编程语言的Laravel框架进行开发。Laravel框架集成了极为丰富的预置组件,只需要聚焦于需要实现的功能并对其进行编写。对云平台及管理系统主要结构的开发流程如下:
1) 配置Laravel框架开发环境
为了开发的便捷性,采用WampServer作为开发的主要工具。WampServer集成了开发过程中关联的服务器及数据库工具,并自带一套PHP解释器,提供了完善的开发环境,省去了以传统方式配置PHP开发环境的复杂过程。完成WampServer软件的部署后,首先通过Composer工具箱,全局下载并安装Laravel开发框架,命令如下:
$ composer global require laravel/installer=~1.1
安装完成后将c:/users/desktop/.composer/vendor/bin路径导入系统环境变量的路径中,框架可控制执行的文件能在控制台命令行中检索到,后期开发过程中仅需在控制台中直接运行命令即可。
2) 创建平台主程序
在Windows系统下的Powershell中打开控制台终端,进入预先为项目预留且具有完全权限的文件夹,执行laravel的应用创建命令,建立以项目名称为索引目录的新应用文件框架。本文将云平台命名为monitorcontrol,这里采用命令:
$ composer create-project laravel/laravel monitorcontrol--prefer-dist
生成名为monitorcontrol的文件夹及Laravel主程序,生成后进入该文件夹:
$ cd monitorcontrol
主程序运行于服务器端,主要处理云平台和管理系统部分的业务逻辑。monitorcontrol主程序文件夹中很多都是自动生成的与框架相关且能自由调用的预置文件,根据系统需求,主要对app文件夹中各文件代码进行编写。文件框架中各主要文件及文件夹作用总结如表2所示。
Table 2. The main function of each file and folder in the file framework
表2. 文件框架各文件及文件夹主要作用
3) 开发API
数据处理系统及管理端需要预先配置数据操作的API接口。在laravel框架中编写接口文件比较方便,在主程序目录下的routes/api.php文件中编写路由即可,编写方式与网页路由相同。在路由编写完成后,在App/Http/Controller目录下建立api文件夹,存放所有的接口文件。管理端对API的控制具有最高权限,用户对数据操作的前提是通过管理端的授权并完成身份验证。
本文创建的接口均为RESTful API。RESTful API遵循统一的接口原则,使用HTTP动词表示操作:GET——获取资源;POST——创建资源;PUT——更新资源;DELETE——删除资源 [9]。RESTful的无状态性决定了只需要维护资源的状态,而不需要考虑客户端状态,这样类型的API简单精炼,还能有效实施负载均衡。RESTful API采用URI标识资源、使用“链接”关联相关的资源、运用统一的接口、使用标准的HTTP方法和无状态性的特点,是在本系统不同层级间构建标准交互接口的理想方案。
客户端在执行与当前功能相关的数据调用请求时,统一从预设的数据调用接口接入监控平台服务器,所有的数据交换均遵循通用标准,不存在运行于不同操作系统的客户端需要用不同的编程语言来实现数据交互的问题,以此大大简化了为实现监控数据在不同平台设备间调用的开发流程。
4.3. 云平台数据库设计
4.3.1. 数据库概念模型设计
对于数据处理系统及管理端而言,车辆监控数据库是整体系统的底层基础。而在数据库设计与开发的过程中,其概念模型的规划显得尤为重要,概念模型建立的本质是对数据库的存储结构进行设计。目前,大部分数据库设计均使用实体-关系模型,即E-R模型。E-R模型从结构上分析拥有实体、属性、关系三个成分,分别用长方形、椭圆形、菱形来表示。就本平台而言,系统管理员及管理系统各功能模块充当的是实体,模块下的各信息列表则为属性,关于数据处理系统的数据库概念模型可由图5表示。
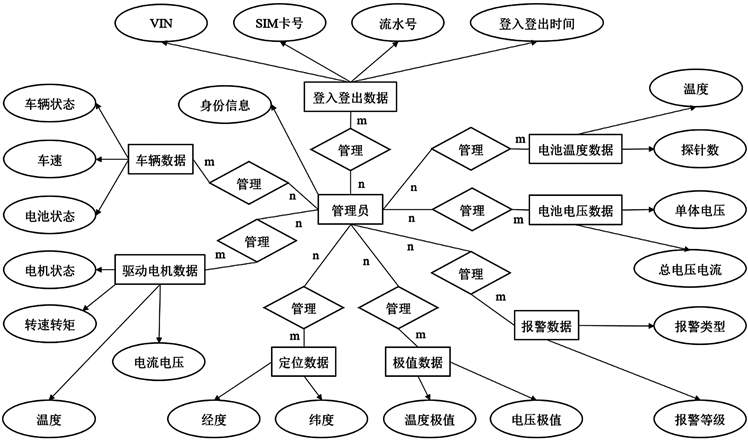
Figure 5. E-R diagram of remote monitoring platform database
图5. 远程监控平台数据库E-R图
4.3.2. 数据库信息列表设计
从数据库E-R图出发,并综合《GB/T 32960电动汽车远程服务与管理系统技术规范》的采集要求,为满足系统的监控功能须创建以下9个数据表:登入登出信息表(t_car_login_and_logout);车辆数据表(t0x01);驱动电机数据表(t0x02);燃料电池数据表(t0x03);车辆定位数据表(t0x05);极值数据表(t0x06);报警数据表(t0x07);电池电压数据表(t0x08);电池温度数据表(t0x09)。为便于开发过程中查阅及核对,将表单名称以与国标中类型编码匹配的t0x0_形式命名。由于篇幅限制,下面仅对登入登出信息及车辆数据表的内容、数据类型及结构进行设计,其余表单设计不再赘述。
1) 登入登出数据表(t_car_login_and_logout)
登入登出信息表存放车辆在远程监控平台上登入登出数据,其结构与包含信息如表3所示。
Table 3. Login and logout information form
表3. 登入登出信息表
2) 车辆数据表(t0x01)
车辆数据表存放监控车辆的实时监控数据,包含车辆运行的各种信息,其结构与相关信息如表4所示。
Table 4. Vehicle data sheet
表4. 车辆数据表
至此,数据库的设计全部完成。
4.4. 实时数据报文解析入库模块开发
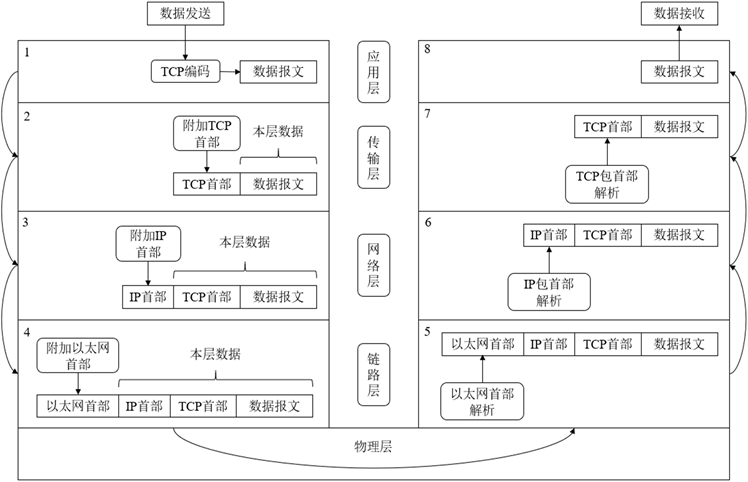
Figure 6. Data packaging and unpacking process
图6. 数据封装及解包流程
车载终端采集的车辆实时数据是以TCP/IP协议报文的形式,通过4G无线网络传输至数据处理系统的服务器端。因此,对于报文的解析处理同样是依赖TCP/IP协议。TCP/IP参考模型将协议分为四个层次,在实时数据传输的实际应用中,TCP/IP协议族会对采集的数据按照这四个层次的层级按照顺序进行包装,每一层的包装操作如下:
1) 应用层:应用程序按照TCP协议对采集的数据进行编码处理。
2) 传输层:参照TCP协议中的规定,将上一层传送下来的字节流分割为报文字段,并在数据前端封装TCP首部。
3) 网络层:参照IP协议,将上一层传送下来的封装数据前端加装IP首部,确认接收IP包的主机。
4) 链路层:将等待发送的封装数据加装以太网首部,并进行CRC编码,最终生成的以太网数据包通过物理层进行发送 [10]。
当实时数据完成上述四层封装后,将会传输到服务器的接收端口。由于其从上到下、按层包装的特点,接收端的解包流程则与发送端的包装流程互逆,数据处理及传输流程如图6所示。
至此,远程监控平台对实时数据的报文完成了初步解析,获得了完整的数据包。由于数据包是以数据帧的形式呈现在服务器端,属于不可读的信息,因此,在后台需要对数据帧进行二次解析,即对应GB/T 32960对数据包各字段的定义,将数据帧还原为可读的信息 [11]。将数据帧还原的操作流程设计依据为数据包的结构,数据包结构如表5所示。
Table 5. Data package structure and definition
表5. 数据包结构及定义
根据其结构特点,平台接收到数据包后应立即进行识别,国标规定起始符为“0x23,0x23”数据包为有效数据,不符合规定起始符的数据包不予解析,并向车载终端回复补发命令;接着进行数据帧异或校验,未通过校验的数据包存在通讯错误,视为无效数据并返回未通过校验信息;之后进行完整性校验,即对数据单元长度标识和实际数据单元长度进行比对,若匹配则进行解析的下一步流程,若不匹配则舍弃当前数据包并向车载终端回复补发命令;完成各识别和校验操作后,即可对数据信息进行还原及入库的操作;由于为保障信息传输的安全性对数据进行了加密,因此首先需要针对加密类型进行解密,获得可操作数据帧;定位命令单元,解析命令标识及应答标识,确认其为车载终端与远程监控平台间交互的何种命令;寻址至数据帧第24位,将信息单元编码对照GB/T 32960中对各类型数据编码的定义,转换为可读信息。车辆VIN作为数据帧的识别码,本质上代表了当前数据包的归属对象,与可读的数据信息整合后,形成具有对象信息的实时数据。最后将可读数据按照其类型编码,填充入前文设计的数据库数据表单中,交由数据库进行存储与管理。实时数据报文在服务器端的解析入库流程可由图7所示。
由于云平台接入的车载终端数量较多,加之各车载终端的实时数据上报频率较高,云平台服务器端亟需解决的是应对高并发实时数据的接收与处理。前文针对此问题,采用了“一主多从”的分布式服务器物理架构,软件部分的程序编写同样需要对此进行优化。在此,本文选用Go语言,针对高并发的实时数据解析入库部分进行程序的编写。
Go语言在并发编程方面的应用主要运用的是goroutine。goroutine是Go语言中处理并行任务的核心,其本质为比线程更小的协程。创建goroutine并不需要对原始代码进行复杂的调整,仅需在原始语句前增加“go”关键字,就可以创建并发执行单元。
报文解析入库部分的文件框架除主运行程序main.go外,其他各模块均存放于tool文件夹,方便主程序的调用。主程序负责设置CPU数量、开启日志服务、连接数据库及启用数据解析功能等方面工作。tool文件夹中包含dataParser、Logger、mysql、tcpServer和utils 5个主要模块。dataParser负责定义各数据的数据类型,并针对各类数据信息单元的不同结构对其解析规则进行制定;另外编写了对信息体数据解析流程,以及对查询指令的处理逻辑。Logger对日志服务进行管理。mysql负责数据库的连接及验证,利用go关键词建立goroutine,实现实时数据的并行入库操作;同时将车辆VIN与实时数据绑定,运用SQL语句将数据按其类型归属插入到数据表单中。tcpServer负责建立通讯连接,完成后开始接收上传数据。接着按照TCP/IP协议中各字段含义的映射规则,运用解析函数将报文中的字段转换为可读信息;同时负责对升级指令、控制指令等下行数据包的发送。utils为数据计算工具,负责标准时间的换算、单双字节计算、数值异常判断及时间生成等数值计算方法的调用。后台主程序启动后各模块协同工作,整体程序按照设计的数据解析逻辑完成解析入库的处理,并在应对高并发场景中具备较好的负载均衡能力。

Figure 7. Data analysis and storage process
图7. 数据解析入库流程
5. 平台软件系统联合测试
软件系统测试采用软硬件结合的方法,即将车载终端连接远程监控平台,针对车载终端软件部分及平台各功能模块进行黑盒测试。
为模拟从车辆实时数据的采集,到最终管理系统对数据库中数据调用的全部流程,同时考虑时间和成本,本文采用编写测试脚本的方法来完成功能性测试。测试脚本根据车辆运行场景分为两部分,其一为行驶场景下的数据收发,另一为驻车充电场景下的数据收发。整体系统测试的原理为:利用CAN总线分析仪作为CAN总线数据的收发设备,在CANTest软件中选择不同运行场景下测试脚本,向车载终端发送模拟数据,模拟车载终端采集车辆实时数据及向云平台发送数据的工作流程。
测试环境硬件部分包括由广成科技有限公司推出的型号为USBCAN-II Pro的CAN总线分析仪,本文设计开发的车载终端,可调电源以及PC。软件部分包括负责转发CAN数据的CANTest应用软件和本文设计开发的电动汽车远程监控平台。测试环境硬件连接如图8所示。

Figure 8. Test hardware wiring diagram
图8. 测试硬件接线图
软件部分的测试流程如下:登录电动汽车远程监控平台,在管理系统中录入车辆身份信息及车载终端(车机)身份信息,并完成两者的绑定操作;启动车载终端,完成与远程监控平台的通讯连接;开启CANTest软件并初始化参数,利用测试脚本文件向车载终端发送模拟数据;进入远程监控平台管理端各功能模块,验证数据显示是否正常以及数据调用是否正确。其具体操作流程可由图9所示。
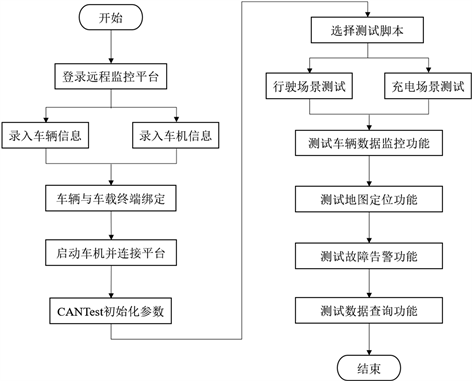
Figure 9. System testing process
图9. 系统测试流程
通过上述方案对远程监控平台的软件测试,根据表现层各模块的功能反馈,整体平台运行良好。其测试结果可由表6所示。

Figure 10. Login interface
图10. 登录界面

Figure 11. Vehicle data monitoring interface
图11. 车辆数据监控界面
Table 6. Results of platform software test
表6. 平台软件测试结果
最后,将本文开发的电动汽车远程监控平台与维特讯新能源汽车数据监测平台及上汽通用五菱汽车分时租赁系统进行功能性对比。维特讯新能源汽车数据监控平台专注于采集车辆运行数据,而五菱分时租赁系统则是典型的基于车辆数据的车联网远程服务系统,其对比结果如表7所示。可以看出,与两典型系统相比,本文设计的电动汽车远程监控平台既满足了作为数据平台应对高负载压力的需求,又在系统层面具有丰富的扩展性和较强的可移植性,可在很大程度上降低二次开发的工作量,凸显了本系统的优势。
Table 7. System functional comparison
表7. 系统功能性对比
6. 结束语
本文基于4G网络环境设计开发了一套用于电动汽车的远程监控平台,其具备较高的可移植性和拓展性,并针对多终端同时接入场景能有效实施负载均衡,软件系统经过测试与验证后能稳定运行。该平台能实现对电动汽车远程监控数据的跨平台管理,可运用于基于车辆监控数据扩展的应用与服务,不仅能提升远程监控管理水平,还能为后续的二次开发提供技术支撑,减少成本开销。
文章引用
王 成,陈方杰,康辰龙,张永峰. 基于4G通信的高负载电动汽车远程监控平台软件设计与开发
Design and Development of Remote Monitoring Platform Software for High-Load Electric Vehicles Based on 4G Communication[J]. 计算机科学与应用, 2020, 10(06): 1209-1223. https://doi.org/10.12677/CSA.2020.106125
参考文献
- 1. 杨立波. 车联网产业发展分析[J]. 中兴通讯技术, 2020, 22(3): 105-113.
- 2. 张井玲, 刘婷婷, 陈琦. 车联网通信技术的发展现状及未来趋势分析[J]. 现代信息技术, 2019, 15(3): 185-187.
- 3. 吴晶晶. 纯电动汽车车载信息的采集与远程监测系统的研发[D]: [硕士学位论文]. 南昌: 南昌大学, 2011.
- 4. 顾文琰. 5G时代车联网的发展和机遇挑战[J]. 科技创新, 2019(3): 1-3.
- 5. 吴海波. 纯电动汽车运行状态参数的远程监测系统设计[J]. 长春大学学报, 2018, 28(4): 13-16.
- 6. 林伟婷. C/S与B/S架构技术比较分析[J]. 信息技术, 2018(13): 15-16.
- 7. Dou, X., Yang, Y. and Chen, X. (2017) Design of Tourism Information System with B/S and C/S Architecture Based on Android and Web Platform. Proceedings of Science, 12, 129-135.
- 8. 任峥峥, 叶桦, 孙晓洁. 基于M2M平台的智能车载终端通信研究[J]. 东南大学学报, 2012, 42(I): 146-151.
- 9. RUNOOB. RESTful架构详解[Z/OL]. https://www.runoob.com/w3cnote/restful-architecture.html
- 10. 胡宇鸿, 高鸿峰, 盛瑞琨. IPv6车联网数据云服务基础架构的研究[J]. 信息与电脑, 2018(10): 54-57.
- 11. 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GB/T 32960-2016电动汽车远程服务与管理系统技术规范[S]. 北京: 中国标准出版社, 2016.