Instrumentation and Equipments
Vol.
11
No.
04
(
2023
), Article ID:
77517
,
8
pages
10.12677/IaE.2023.114048
磁悬浮演示仪设计原理的研究
白雪健,王世杰,杨俊腾,徐树葑,杨森,赵佳洋,王莉
沈阳航空航天大学理学院,辽宁 沈阳
收稿日期:2023年11月11日;录用日期:2023年12月12日;发布日期:2023年12月19日
摘要
磁悬浮技术是一种应用于物理、交通等领域的高新技术,具有很强的教育意义。磁悬浮演示仪是一种利用磁悬浮原理制作的教学工具,用于物理教学中的演示和实验。本文首先介绍了磁悬浮技术和磁悬浮演示仪的基本原理,然后针对磁悬浮演示仪的设计、制作、使用进行详细阐述,并且通过实验比较了传统教学方法和磁悬浮演示仪演示方法的效果。结果表明磁悬浮演示仪在物理教学中能够提高学生的学习兴趣、激发学生的学习热情、增强学生的实验能力和动手能力,有助于培养学生的科学素养。
关键词
磁悬浮技术,磁悬浮演示仪,物理教学,演示教学,科学素养

Study on the Design Principle of the Magnetic Levitation Demonstrator
Xuejian Bai, Shijie Wang, Junteng Yang, Shufeng Xu, Sen Yang, Jiayang Zhao, Li Wang
School of Science, Shenyang Aerospace University, Shenyang Liaoning
Received: Nov. 11th, 2023; accepted: Dec. 12th, 2023; published: Dec. 19th, 2023

ABSTRACT
Magnetic levitation technology is a high-tech application in the fields of physics, transportation, etc. It has strong educational significance. The magnetic levitation demonstrator is a teaching tool made by using the principle of magnetic levitation, which is used for demonstration and experimentation in physics teaching. This paper firstly introduces the magnetic levitation technology and the basic principles of the magnetic levitation demonstrator. The design, production and use of magnetic levitation demonstrator are secondly elaborated. The experimental comparison between traditional teaching methods and magnetic levitation demonstration methods is conducted, which shows that magnetic levitation demonstrator can improve students’ interest in learning, stimulate students’ learning enthusiasm, enhance students’ experimental ability and practical ability, and help cultivate students’ scientific literacy in physics teaching.
Keywords:Magnetic Levitation Technology, Magnetic Levitation Demonstrator, Physics Teaching, Demonstration Teaching, Scientific Literacy

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
磁悬浮技术是一种应用磁力原理实现物体悬浮的前沿技术,在交通运输、能源等领域具有广泛的应用前景。磁悬浮演示仪作为一种能够直观展示磁悬浮原理和特性的实验设备,对于科学教育、工程应用和磁悬浮技术研究具有重要意义。
科学教育是培养创新人才和提高公众科学素养的重要途径。磁悬浮技术作为一项高新技术,其原理和特性的直观展示对于激发学生对科学的兴趣和提高科学教育效果有着重要的作用。通过磁悬浮演示仪,学生们可以实时观察和体验悬浮物体的稳定性、控制方法等,深入了解磁悬浮技术的工作原理。
另外,磁悬浮技术在交通运输和能源领域具有巨大的应用潜力。传统的轮轨交通和发电系统存在着能源消耗、环境污染等问题,而磁悬浮技术以其低能耗、高运行速度、零摩擦等优势被认为是未来交通运输和能源领域的重要发展方向。磁悬浮演示仪可以用于展示磁悬浮列车、磁悬浮发电等工程应用,帮助工程师和决策者更好地了解磁悬浮技术的优势和潜力,推动其在实际工程中的应用和发展。
目前,国内外对于磁悬浮技术和磁悬浮演示仪的研究已经取得了一定的进展。例如,在磁悬浮控制方法方面,许多学者提出了不同的控制策略和优化算法,以提高悬浮系统的稳定性和控制性能。在磁悬浮演示仪的设计方面,已有研究报道了不同结构和材料的磁悬浮演示仪,以满足不同应用场景的需求。然而,目前还缺乏一种综合性的下推式磁悬浮演示仪的研究,该演示仪可以实现物体在空中悬浮、稳定控制等功能。因此,本论文旨在研究一种下推式磁悬浮演示仪,以实现物体的悬浮和控制,并对其特性进行深入研究。
在本论文中,我们将首先介绍磁悬浮技术的原理,然后建立下推式磁悬浮演示仪的数学模型,并将其分为静态和动态两种模型进行深入研究。通过本论文的研究,我们希望能够为磁悬浮技术的教育、工程应用和研究提供新的思路和方法。
2. 磁悬浮技术和磁悬浮演示仪的基本原理
磁悬浮技术是利用磁场力和重力相互平衡的技术,其基本原理是利用磁场产生力的特性,使物体在磁场中悬浮并保持稳定的状态。下推式磁悬浮演示仪是一种利用磁悬浮原理制作的教学工具,其基本结构由磁铁、底座和悬浮体三部分组成,其中磁铁产生磁场,底座起到定位作用,悬浮体则利用磁场力和重力相互平衡,实现在磁场中悬浮的效果。
2.1. 电磁悬浮控制系统模型的建立
2.1.1. 下推式的电磁悬浮系统模型
下推式磁悬浮系统(也称为吸附式磁悬浮系统)是一种通过控制磁场来使物体悬浮在磁性轨道上的系统。在这种系统中,有磁性底座,而悬浮物体则是一块永磁体。如图1所示。
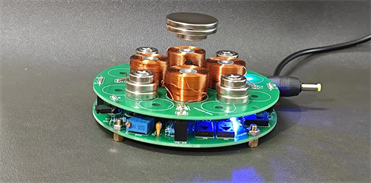
Figure 1. A physical picture of the push-down magnetic levitation system
图1. 下推式磁悬浮系统实物图
下面是下推式磁悬浮系统的受力分析:
重力:悬浮物体仍然受到地球重力的作用,其方向始终是向下的。重力的大小由物体的质量m决定,通常表示为Fgravity = mg其中Fg是重力作用的力g是重力加速度。
永磁悬浮力:永磁悬浮力是通过磁性悬浮物体的磁场以与磁性底座互相作用而产生的。这个力的方向是垂直于磁性底座的表面,通常是向上的,以克服重力。永磁悬浮力的大小通常取决于磁性底座和磁性悬浮物之间的距离h,以及这些元件的磁性质量。磁悬浮力可以表示为Fmagnetic = khx,其中Fmagnetic是磁悬浮力,k是与磁性底座和磁性元件有关的刚度常数,x是磁性质量。
电磁悬浮力:在下推式磁悬浮系统中,电磁体也可以用来控制悬浮力。通过在电磁体中传递电流I,可以改变电磁体的磁场,从而影响悬浮力的大小和方向。电磁悬浮力的大小通常与电流强度成正比,即Felectromagnetic = f(I),其中Felectromagnetic是电磁悬浮力,I是电磁体中的电流,函数f描述了电磁悬浮力与电流的关系。如图2所示。
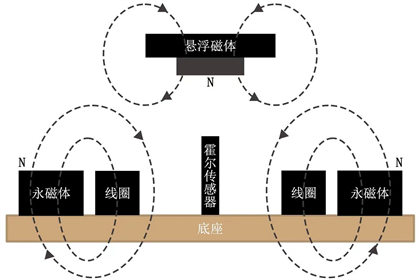
Figure 2. Schematic diagram of the push-down magnetic levitation system (face)
图2. 下推式磁悬浮系统示意图(正视)
空气阻力:在某些情况下,悬浮物体还受到空气阻力的作用,尤其是在高速运动时。空气阻力的大小取决于物体的形状、速度和空气密度,通常可以表示为 ,其中Fair是空气阻力,Cd是阻力系数,A是物体的横截面积,ρ是空气密度,v是物体的速度。在我们的模型中空气阻力忽略不计。
在下推式磁悬浮系统中,关键任务是通过控制磁场和电磁体电流来平衡重力、永磁悬浮力和电磁悬浮力,以保持悬浮物体在所期望的高度上。这通常需要高度精密的控制算法和传感器来实现,中心即为霍尔元件传感器。如图3所示:
![]()
Figure 3. Schematic diagram of the push-down maglev system (overhead view)
图3. 下推式磁悬浮系统示意图(俯视)
2.1.2. 静态的电磁悬浮控制系统模型
下推式磁悬浮系统可以被建模为一个基于电磁原理的控制系统 [1] 。以下是一个简单的数学模型,其中包括一些关键参数:
设磁悬浮系统的控制变量为y(t),则系统的控制方程可以表示为:
其中,m表示磁悬浮系统的质量,c表示系统的阻尼系数,k表示系统的弹性系数,y0表示系统的静态位置,F(t)表示外部施加在系统上的控制力,如电磁驱动力。
这个模型可以进一步扩展,以包括控制系统的其他参数和变量。例如,可以考虑控制电流和磁场的关系、电磁感应力和磁悬浮高度的关系等等。
在实际应用中,这些数学模型和公式可以用于设计和优化磁悬浮系统 [2] ,以达到最佳性能和效果。进一步扩展磁悬浮的数学模型公式,可以加入控制系统的其他参数和变量,如下所示:
对于磁悬浮系统的磁场,可以建立以下方程:
其中,B(z)表示磁场密度,z表示磁悬浮系统的位置,μ0表示真空中的磁导率,J(r)表示电流密度,r表示电流源的位置,V表示电流源的体积。
在控制磁悬浮系统的高度和稳定性时,可以考虑以下方程:
其中,F(z)表示磁悬浮系统所受合力,m表示磁悬浮系统的质量,c表示系统的阻尼系数,k表示系统的弹性系数,z0表示系统的静态位置,FEM表示电磁驱动力。
对于电磁驱动力FEM,可以考虑以下方程:
其中,J(r)表示电流密度,B(z)表示磁场密度,μ0表示真空中的磁导率,V表示电流源的体积。
这些数学模型和公式可以用于设计和优化磁悬浮系统,从而实现更好的控制和稳定性。同时,这些模型还可以为磁悬浮系统的控制器提供指导和优化建议。构造磁悬浮载物平衡 [3] 的数学模型公式,可以考虑以下方程:
其中,Fmg表示载物的重力,FEM表示电磁驱动力,Ff表示载物和轨道之间的摩擦力。
在磁悬浮系统中,载物的重力Fmg始终存在。当电磁驱动力Fmg和载物和轨道之间的摩擦力Ff平衡Fmg时,载物可以实现平衡悬浮 [4] 。为了实现载物平衡悬浮,可以调整电磁驱动力Fmg和轨道的摩擦力Ff。
具体来说,可以通过调整磁铁中的电流大小,从而调整电磁驱动力FEM的大小。同时,可以通过轨道表面的润滑剂和材料的选择来调整载物和轨道之间的摩擦力Ff。通过这些调整,可以实现载物的平衡悬浮 [5] 。
2.1.3. 动态的电磁悬浮控制系统模型
需要注意的是,上一节的模型仅考虑静态平衡条件下的载物平衡悬浮。在实际应用中,载物会产生重量的变化,需要使用控制器和反馈机制来实现动态平衡和稳定性。因此,在实际应用中,需要进一步优化和改进磁悬浮载物平衡的数学模型。在考虑动态平衡条件时,我们需要将磁悬浮载物的数学模型扩展到时间域,考虑载物受到外部扰动的情况。在这种情况下,我们可以将磁悬浮载物的动态行为建模为以下形式:
其中,m表示载物的质量,x表示载物的位移,c表示阻尼系数,k表示弹性系数,F(t)表示载物受到的外部扰动。
在这个模型中,载物的位移受到阻尼、弹性和外部扰动的影响。为了实现动态平衡,我们需要控制阻尼系数和弹性系数,以及使用反馈控制来消除外部扰动。具体来说,可以通过调整轨道和载物的材料、形状、润滑剂和温度等因素来调整阻尼和弹性系数,以控制载物的动态行为。同时,可以使用传感器和控制器来监测载物的位移和速度,并根据反馈信号来调整电磁驱动力和轨道的摩擦力,以消除外部扰动,实现动态平衡和稳定性。
因此,考虑动态平衡条件下的磁悬浮载物模型需要考虑更多的因素和参数,需要使用更加复杂的控制方法和算法来实现平衡和稳定性。一组常见的动态载物磁悬浮数学模型公式包括:
电磁铁施加的力的公式
其中,F表示电磁铁施加的力,k表示电磁铁的比例常数,I表示电流强度。
载物动力学方程
其中,m表示载物的质量,x表示载物的位移,c表示阻尼系数,k表示弹性系数,F表示电磁铁施加的力。
基于以上方程,我们可以推导出使其达到稳定性条件的方法:
将载物位移表示为以下形式:
其中,X和s分别表示载物的振幅和阻尼系数。当s为负数时,载物是稳定的。
将载物位移对时间的二阶导数表示为以下形式:
其中,ωn是载物的固有角频率,其表示载物自身振动的频率。当载物的阻尼系数s小于固有角频率ωn时,载物的位移将呈现出振荡的形式。当s大于ωn时,载物将逐渐趋向于稳定状态。
根据上述方程,可以推导出稳定性条件:
此外,为了进一步提高磁悬浮载物的稳定性,我们还可以采取以下措施。
2.2. PID控制算法 [6] 对磁力实时调整以稳定载物
为了控制磁悬浮中磁力与载物重力平衡,通常需要使用反馈控制系统。该系统可以通过不断监测磁悬浮系统中载物的位置和姿态,并对磁力进行实时调整,以保持磁力与载物重力之间的平衡。
具体来说,反馈控制系统需要通过传感器等设备实时监测载物的位置、速度和加速度等参数,并将这些参数输入到控制器中进行处理 [7] 。控制器会根据预设的控制算法,计算出相应的磁力控制信号,并将其发送给电磁铁或电磁悬浮系统中的电路,从而调整磁力的大小和方向。
PID (比例–积分–微分)控制系统是一种广泛用于自动控制的方法,它可以帮助调整系统的输出,以接近或维持一个目标值。下面详细说明如何使用PID控制系统:
1) 理解PID控制算法的组成部分:
比例项(P):比例项根据当前误差来调整控制输出。它表示当前误差的一部分,用于确定控制输出的大小。
积分项(I):积分项考虑过去误差的总和,用于消除静态误差。它对于长时间稳定性很有帮助。
微分项(D):微分项考虑误差的变化率,用于抑制振荡和快速响应。
2) 设定目标值:
确定你想要控制系统接近或维持的目标值。这可以是温度、速度、位置等任何需要控制的物理量。
3) 采集反馈信号:
使用传感器或其他测量设备来采集系统的实际状态。这个状态通常与你的目标值有关。
4) 计算误差:
将目标值与实际状态进行比较,计算误差(偏差)。误差是目标值和实际值之间的差异。
e(t) = 目标值 − 实际值
5) 计算PID输出:
使用PID控制算法来计算控制输出。计算方式如下:
u(t)是控制输出。
Kp是比例增益,用于调整比例项的影响。
Ki是积分增益,用于调整积分项的影响。
Kd是微分增益,用于调整微分项的影响。
e(t)是当前的误差。
是误差的积分,表示过去误差的总和。
是误差的导数,表示误差的变化率。
6) 执行控制操作:
使用计算的控制输出来执行相应的控制操作,例如调整阀门、电机速度或电磁线圈电流,以影响系统的行为,使其接近目标值。
7) 循环控制:
不断重复上述步骤,实时监测系统状态,计算误差并调整控制输出,以保持系统接近或维持在目标值附近。
8) 调整PID参数:
根据实际应用和系统响应,可以根据需要调整PID控制器的参数,包括Kp、Ki和Kd。不同应用可能需要不同的参数设置来实现最佳控制性能。
PID控制系统是一种强大且常用的控制方法,适用于各种自动控制应用,从温度控制到机械系统的位置控制。通过调整PID参数和反馈信号,可以实现准确的系统控制,从而提高稳定性和性能。
这个示例中,我们首先使用SciPy库中的minimize函数找到了平衡所需的电磁力。然后,我们使用数值积分方法来模拟物体的高度随时间的变化,并将结果绘制成图表以进行可视化,如图4所示。这个示例假设已经知道了平衡所需的电磁力,但在实际系统中,通常需要一个反馈控制系统来实时调整电磁力以维持平衡。
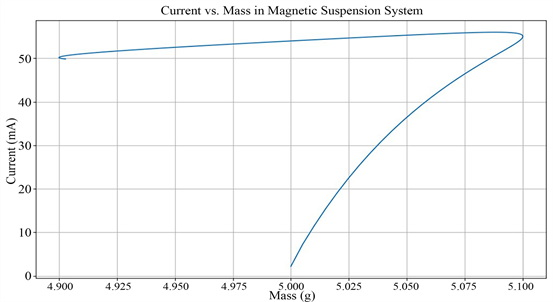
Figure 4. The curve of gravity and current of the load
图4. 载物所受重力和电流的变化曲线
3. 结论
本文对磁悬浮演示仪的设计原理进行了介绍和研究,给出了下推式磁悬浮系统模型、静态的电磁悬浮系统控制模型、动态的电磁悬浮系统控制模型。在此基础上,进一步研究了PID控制算法对磁力实时调整以稳定载物的原理,同时给出了载物所受重力和电流的变化曲线。通过以上内容的研究,本文得到:
磁悬浮原理:通过磁场和磁性材料之间的相互作用来实现物体的悬浮,这是基于磁力的一种无接触的悬浮技术。
稳定性:即使没有实际的支撑结构,物体在磁悬浮系统中保持相对稳定的位置。这突显了磁悬浮系统的稳定性和控制能力。
悬浮高度调节:在实际的一些演示装置中,允许用户手动或自动地调整物体的悬浮高度。这展示了磁悬浮系统可以根据需要控制物体的位置。
无接触运动:磁悬浮允许物体在没有物理接触的情况下进行运动,这有助于减少摩擦和能量损耗。
本文的磁悬浮演示仪的设计原理的研究对其应用提供理论支撑,下推式磁悬浮演示仪主要用于教育和展示目的,帮助观众理解磁悬浮原理以及其在科技领域的应用潜力。同时启发思考磁悬浮技术的潜在应用领域,如高速列车、磁悬浮轮椅、科学仪器等。这有助于传达磁悬浮技术在现实世界中的重要性和多样性。
基金项目
沈阳航空航天大学大学生创新创业项目(X202210143054)。
文章引用
白雪健,王世杰,杨俊腾,徐树葑,杨 森,赵佳洋,王 莉. 磁悬浮演示仪设计原理的研究
Study on the Design Principle of the Magnetic Levitation Demonstrator[J]. 仪器与设备, 2023, 11(04): 375-382. https://doi.org/10.12677/IaE.2023.114048
参考文献
- 1. 张春亮. 电磁悬浮系统的智能控制算法研究[D]: [硕士学位论文]. 青岛: 青岛大学, 2022.
- 2. 曹广忠, 潘剑飞, 邱洪. 磁悬浮系统控制算法及实现[M]. 北京: 清华大学出版社, 2013.
- 3. 万梁. 磁悬浮运动平台的控制系统研究[D]: [硕士学位论文]. 长沙: 中南大学, 2007.
- 4. 陆新江. 电磁悬浮平台系统的承载特性与控制研究[D]: [硕士学位论文]. 长沙: 中南大学, 2005.
- 5. 刘琳. 磁悬浮技术与磁悬浮列车[J]. 现代物理知识, 2004, 16(3): 16-20.
- 6. 梁中华, 吴红波, 杨霞, 李庆江. Fuzzy-PID控制算法在永磁电磁混合悬浮系统中的应用[J]. 沈阳工业大学学报, 2008(1): 32-37.
- 7. 师宁, 季君, 邱利军. 基于PID控制算法的电磁车设计系统[J]. 山西电子技术, 2017(4): 13-16+23.