Open Journal of Transportation Technologies
Vol.
11
No.
03
(
2022
), Article ID:
52064
,
15
pages
10.12677/OJTT.2022.113026
基于运动学原理的换道轨迹预测
刘磊,王易,康凯,李洪庆
中国汽车技术研究中心有限公司,天津
收稿日期:2022年4月8日;录用日期:2022年5月23日;发布日期:2022年5月31日

摘要
换道作为车辆的基本驾驶行为之一,相较于跟驰行为,换道过程更具复杂性,对道路上车辆的运行安全有着至关重要的影响。为了对车辆换道轨迹进行准确预测,满足自动驾驶条件下车辆换道的安全性与合理性,本文选定五次多项式为换道轨迹预测基础模型,构建效益函数和选取约束条件,应用MATLAB中的fmincon优化工具箱,使用二次序列优化算法对模型参数进行寻优求解。对比换道预测轨迹与实际轨迹,对模型的有效性进行验证,结果表明预测轨迹的横向位移绝对误差集中在−0.3 m~0.3 m之间,偏转角速度波动峰值均小于2˚/s,加速度维持在0~2 m/s2的范围内,满足轨迹合理性、换道舒适性和平稳性。
关键词
换道,运动学原理,序列二次规划,轨迹预测

Lane Changing Trajectory Prediction Based on Kinematics Principle
Lei Liu, Yi Wang, Kai Kang, Hongqing Li
China Automotive Technology and Research Center Co, Ltd., Tianjin
Received: Apr. 8th, 2022; accepted: May 23rd, 2022; published: May 31st, 2022

ABSTRACT
Lane changing is one of the basic driving behaviors of vehicles. Compared with car following behavior, the lane changing process is more complex and has a vital impact on the operation safety of vehicles on the road. In order to accurately predict the vehicle lane change trajectory and meet the safety and rationality of vehicle lane change under the condition of automatic driving, this paper selects the quintic polynomial as the basic model of lane change trajectory prediction, constructs the benefit function and selects the constraints, applies the fmincon optimization tool box in MATLAB, and uses the quadratic sequence optimization algorithm to optimize the model parameters. The effectiveness of the model is verified by comparing the lane change predicted trajectory with the actual trajectory. The results show that the absolute error of the lateral displacement of the predicted trajectory is concentrated between −0.3 m~0.3 m, the peak value of deflection angle velocity fluctuation is less than 2˚/s, and the acceleration is maintained in the range of 0~2 m/s2, which meets the rationality of the trajectory, lane change comfort and stability.
Keywords:Lane Changing, Principle of Kinematics, Sequential Quadratic Programming, Trajectory Prediction

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
通过预测车辆运行轨迹来实现车辆安全预警是近几年的研究热点。换道轨迹预测和拟合模型更加侧重于换道过程的本身,为的是为车辆换道提供最优轨迹,其常被用于车辆预警与智能网联车的研究当中。目前,车辆换道轨迹模型的研究主要是体现在两个方面,其一是使用高次多项式、正余弦函数等几何方法建立换道轨迹模型 [1] [2],其优点是可以通过使用较少的参数对换道轨迹进行直观、精确的表达,且运算量较小,在模型的验证上缺乏普遍性。另外是通过使用机器学习等人工智能方法对已有换道数据的训练分析换道轨迹 [3] [4],其优点是可以对换道的多个影响因素进行综合的考虑,但需要庞大的轨迹数据作为基础。
国外学者基于数学模型的换道轨迹研究始于1979年,Enke用正余弦函数对相对理想状态下的换道轨迹模型进行表达 [5],受限于考虑的影响因素较少,轨迹误差较大。1994年Chovan [6] 使用正弦函数和梯形函数建立换道轨迹模型,用于研究车辆换道而导致的碰撞,但在对特殊换道场景进行拟合时发现通过参数的调整并不能使拟合效果得到较好优化。2003年Papadimitriou和Tomizuka [7] 也使用五次多项式描述车辆换道轨迹,但由于使用图像进行信息采集来标定模型的参数,无法对换道的起点进行明确的界定。且存在不规则换道轨迹,导致模型只对行驶速度在20~30 m/s的换道车辆的换道轨迹拟合较好,同时也跟Nelson模型存在一样的问题,当起止状态相同时车辆的换道轨迹完全一致。
国内学者游峰等 [8],于2005年使用Sin函数、圆弧函数、正反梯形函数以及多项式函数对车辆换道轨迹进行拟合。2010年,李玮等人以 [9] 四段式车道变换理论为基础,仅从轨迹特性上出出发,采用B样条理论对传统换道轨迹进行重新的规划,并标定了车辆换道轨迹的性能评价参数,一定程度上弥补了传统换道轨迹的缺陷,但模型的不足时未考虑横摆角速度等车辆动力学特性。2013年,杨志刚等 [10] 针对传统换道前轮转向角为0、侧向加速度过大、越变和轨迹曲率不连续等缺陷,将正弦函数与等速偏移函数进行结合,是模型具有优异的平滑性。但是模型为了使侧向加速度恒为0,对换道车采用固定速度换道进行分析,存在一定的局限性。2015年,北京交通大学张颖达等 [11] 基于NGSIM轨迹数据,对换道行为的微观特性进行了研究,其通过构建换道起终点时空约束规则,对完整的单次换道行为参数进行了提取,利用半对数模型,对自由换道和强制换道在换道时间的显著性因素上进行分析,并发现五次多项式对两种换道行为都能实现较好的拟合,但文中没有对换道的开始和结束进行明确的定义。
基于前人研究的基础与不足,为了满足自动驾驶不同换道初始条件下实时换道轨迹的预测,本文选取建立五次多项式轨迹预测模型,明确定义换道起始点,并将车辆换道过程加速度、偏转角速度和换道时间、横纵偏移距离等多重影响因素纳入序列二次规划算法,寻求轨迹合理性、换道稳定性和舒适性等多重条件最优下的换道轨迹。
2. 换道场景建模与基础模型选取
2.1. 换道场景建模
车辆的换道行为多出现在较大密度的交通流行驶过程中。对下图1情景中的车辆换道行为进行研究,其中M车为换道车辆,准备从当前所在的车道(M1和M4之间)换到左侧的换道车道(M2和M3之间)。M1为当前所在车道的前车,M4为当前所在车道的后车,M2为换道车道的前车,M3为换道车道的后车。
为了明确在换道过程中各车所在的位置,依据车道方向建立直角坐标系,将车辆向前纵向运动的方向设为y轴,与之相对的横向运动方向设为X轴。则变量 、、、 分别表示在i时刻车辆的纵向位移、横向位移、速度和加速度。

Figure 1. Schematic diagram of lane change
图1. 换道示意图
2.2. 基于运动学原理的换道轨迹预测模型的建立
考虑到不同车辆的运动惯性和初始的运动状态会有所不同,不同车辆换道轨迹也会有所不同,将基于运动学模型,从换道特征入手对不同初始运行状态的换道车辆进行轨迹预测。
换道车辆在换道过程中,其轨迹首先在沿着车辆行驶路径的中心线Frenet帧中产生,然后转换为笛卡尔坐标系,建立以五次多项式为基础的横向X(t)、纵向Y(t)换道轨迹函数:
(1)
式中: 、, 为常系数。
换道过程中的速度和加速度函数可以通过对轨迹函数求导进一步表示为:
(2)
(3)
沿用2.1节建立的笛卡尔坐标系O-XY,车辆的运动学关系如图2所示:

Figure 2. Kinematic model
图2. 运动学模型
换道车辆在换道过程中的运动关系满足:
(4)
式中: ——车身所在方向为坐标轴的横向速度;
——车身所在方向为坐标轴的纵向速度;
——车身的横摆角;
——前轮转向角;
——车身的航向角;
L——换道车轴距。
对换道车辆的初始状态和最终状态进行定义,初始位置坐标为(),初始速度为 ,加速度为 ,初始车身航向角为 ;最终位置坐标为(),最终速度为 ,加速度为 ,最终车身航向角为 。则初始和终点对应的边界条件可以表示为:
(5)
将 作为自变量,公式5可以看作是多元线性非齐次函数求解,通过计算求解方程,换道轨迹函数中的系数 可以表示为:
(6)
使用相同的方式对纵向换道轨迹中的参数 进行求解。
3. 效益函数构建与约束条件选取
3.1. 效益函数构建
构建效益函数寻求最优的换道轨迹,车辆换道的轨迹规划是否合理,可以从换道轨迹的拟合度(轨迹覆盖率)、换道的稳定性和舒适性三个方面进行判别 [12],其中车辆的横摆角速度 是判定换道稳定性的重要指标,车辆的加速度a是衡量换道舒适性的重要指标,这两个指标越小则换道轨迹越合理。换道车辆实施换道行为会对其相邻车辆产生较为明显的干扰,因而要尽可能地减少换道距离,也就是缩短换道时间 。但换道过程中,换道时间 与横摆角速度和加速度是呈反比的,为了实现换道轨迹的最优,需要以三者为因变量建立目标函数g,在约束条件下寻求最优解。
三个因变量的数据由于单位和性质的不同会存在不可比性,所以首先采用极值化方法进行无量纲化处理 [13],使三个变量全部处于0~1之间,进而可以在同一目标函数下表达,处理公式如下所示:
(7)
式中: 表示原始偏转角速度;
表示偏转角速度极大值和极小值之差;
表示无量纲处理后的偏转角速度。
(8)
式中: 表示原始加速度;
表示加速度极大值和极小值之差;
表示无量纲处理后的加速度。
(9)
式中: 表示原始换道时间;
表示换道时间极大值和极小值之差;
表示无量纲处理后的换道时间。
最终效益函数可以表示为:
(10)
式中: ,, 分别表示换道平均横摆角速度 、平均加速度 和换道时间 在目标函数下的权重系数,分别取 ,,,各权重系数加和为1。
3.2. 约束条件的选取
车辆在换道过程中会受到自身驱动性能限制,车体也会受到地面摩擦力等方面的影响,为了保证驾驶舒适性,要对横向速度 和横向加速度 进行约束 [14],具体条件为:
(11)
车辆的横摆角速度是车辆绕车身坐标系的垂向轴转动的角速度,是反映车辆横向稳定性的主要指标。由于一般情况下,车辆换道过程中的横向速度 明显小于纵向速度 ,车辆的质心侧偏角接近0,所以横摆角速度可以近似的表示为:
(12)
对横摆角求导可以求得车辆的横摆角速度,对车辆执行换道任务时的横摆角速度 ,对车辆执行换道任务时的约束条件为:
(13)
不同换道方式下的横向偏转角速度累计频率分部直方图如图3所示,可以看出4种换道方式中横向偏转角速度小于6˚/s的车辆全部占到换道车辆总数的95%以上,因而将横向偏移角速度这一约束条件定为:
(14)

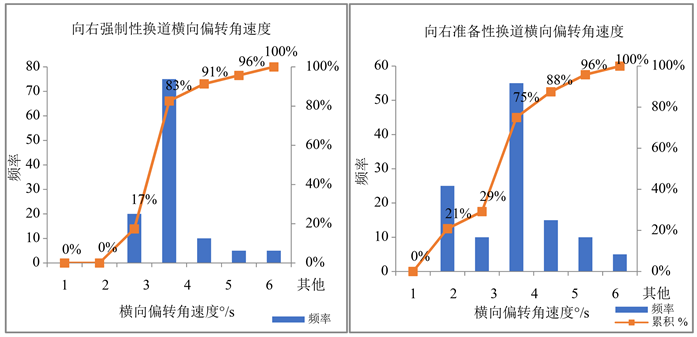
Figure 3. Sectional histogram of cumulative frequency of lateral deflection angle velocity under different lane changing modes
图3. 不同换道方式下横向偏转角速度累计频率分部直方图
为了使换道车辆存在明显的换道特征且换道轨迹明显,在第二章中对NGSIM轨迹进行提取时,剔除换道时间在2秒以下的车辆,经过统计分析进一步得知,无论是准备性换道还是强制性换道其换道时间的均值都在3~4秒的范围内,换道车辆在6 s以下完成换道的占比在95%以上,在此将换道时间 这一约束条件定为:
(15)
同样,为了提取明显的换道轨迹,且若换道车辆能够实现完整的换道行为,其横向偏移距离至少为一个车身的宽度,而最大的偏移距离不宜超出一条车道的宽度,故而将横向偏移距离 这一约束条件定为:
(16)
先前学者通过对车辆换道行为的研究发现当换道车辆在实施横向偏移的过程中,横向的加速度普遍存在先正向增大再减小,随后再负向的增大再减小,且初始和最终的横向加速度在0的极小范围上下波动,因而使用正弦函数对横向加速度进行最为简单和合理的表示:
(17)
在给出横向加速度的基础上,对横向加速度进行积分可以获得随时间变化的横向速度,其形式如下:
(18)
随时间变化的横向位移可以通过对横向速度进行积分,得到公式为:
(19)
4. 轨迹预测模型求解与评价
4.1. 模型求解
使用MATLAB中的fmincon优化工具箱中的序列二次规划算法对有约束条件的非线性多元函数进行优化求解 [15]。此非线性规划求解问题可以表示为 [16]:
(20)
a) 等式约束的二次规划问题,写成矩阵形式,即:
(21)
若方程有解,可以消元变换得到唯一解 。当此解中的乘子向量 不全为零的时候, 就是此问题的最优解 ,即 。
b) 一般约束的二次规划问题
对于一般约束下的二次规划问题,通过组合迭代点 起作用的约束和等式约束,构成新的约束问题:
(22)
其中,E代表等式约束下的集合, 代表不等式约束中起作用约束的下标集合。当解 中对应的原等式约束条件乘子不全为零,对应的起作用约束条件乘子不小于零时, 就是此问题的最优解 。
以换道车辆的纵向初始运行速度分别为20 m/s、25 m/s和30 m/s,横向偏移为3.75 m为例,进行优化求解,定义换道车辆换道初始点坐标 为 ,得到不同初始条件下的轨迹优化参数,如下表1所示:

Table 1. Trajectory optimization parameters
表1. 轨迹优化参数
则在不同初始速度下的五次多项式换道轨迹可以得到表示:
当 时:
(23)
当 时:
(24)
当 时:
(25)
对以上三种换道状态下的轨迹、横向偏移速度、横向偏移加速度和偏转角速度进行仿真分析,如图4所示。可以看出横向偏移速度在0 m/s~1.6 m/s之间,横向偏移加速度在−1 m/s~1.2 m/s2之间,偏转角速度在−2˚/s~2˚/s之间。在换道开始时段三种状态的位移轨迹接近重合,且在换道车行驶至压线位置附近时,由于需要观察换道车道前后车的运行状况,横向偏移速度会降至最低,甚至会出现短暂的反向偏移,但在目标车跨线至目标车道后,会继续提升横向偏移速度,且初始纵向速度较大的车辆会较先完成换道。初始纵向速度越大,车辆换道过程中出现的偏移速度和加速度的峰值也会越高,但偏转角速度的变化相似且峰值极为接近。


Figure 4. Simulation diagram of track, offset speed, acceleration and angular velocity of lane changing vehicle
图4. 换道车辆轨迹、偏移速度、加速度、角速度仿真图
4.2. 轨迹预测模型评价
本节对提出的基于运动模型的轨迹预测模型进行评价,以向左、向右强制性换道和准备性换道四种换道方式的单车实际换道轨迹与预测轨迹进行对比,从轨迹的合理性、舒适性和稳定性三个方面对模型用于换道轨迹预测的可行性进行分析。
1) 轨迹合理性分析
选取四种换道方式的单车换道轨迹与预测轨迹进行对比,从图5可以看出准备性换道的轨迹重合度要明显高于强制性换道,但从整体而言,预测轨迹的平顺性要优于实际换道轨迹,横向位移绝对误差的范围全部集中在−0.3 m~0.3 m之间,纵向位移绝对误差全部集中于0~5 m之间,预测结果的符合度较高。

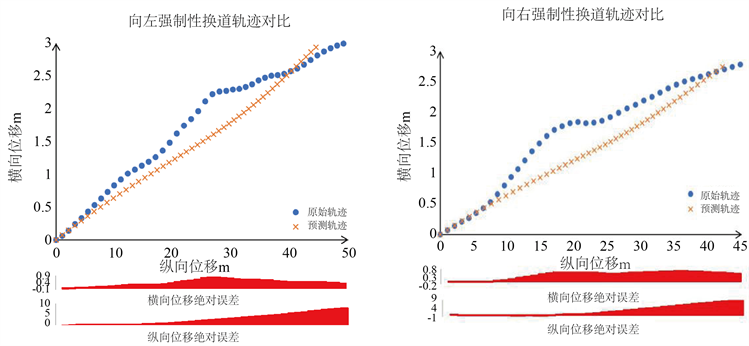
Figure 5. Comparison diagram of single track
图5. 单条轨迹对比图
选用平均绝对误差(MAD)、均方差(RMSD)和平均相对误差(MRD)对模型优化轨迹和换道车辆换道原始轨迹进行比较,对轨迹优化模型的合理性进行评价分析,三者的计算表达式如下所示:
(26)
(27)
(28)
式中: 为车辆n在换道过程M时间中的横向位移差、纵向位移差的平均值;
为车辆n在换道过程m时刻的横向位移差和纵向位移差;
M为车辆n换道时间原始记录值,由于数据是以0.1s每帧进行记录,则取 ;
N为换道车辆总数。
从表2对四种换道方式的横向、纵向位移得到的评价指标可以看出,由于横向位移范围远小于纵向位移范围,相比之下横向位移的平均绝对误差、均方差和平均绝对误差要小很多。对横向位移这一单一因素进行对比时可以看出,向右准备性换道的平均绝对误差为最小的0.142,且误差波动最为平稳。在纵向位移方面,向左强制性换道的平均绝对误差最小,为2.2263,且误差波动最为平稳。
Table 2. Evaluation index analysis of lane changing trajectory
表2. 换道轨迹评价指标分析
2) 轨迹舒适性分析
以换道过程中加速度的波动变化作为换道舒适性的评价指标,同样选取四种换道方式的单条换道轨迹过程中的加速度和预测轨迹的加速度进行对比,如下图6所示:
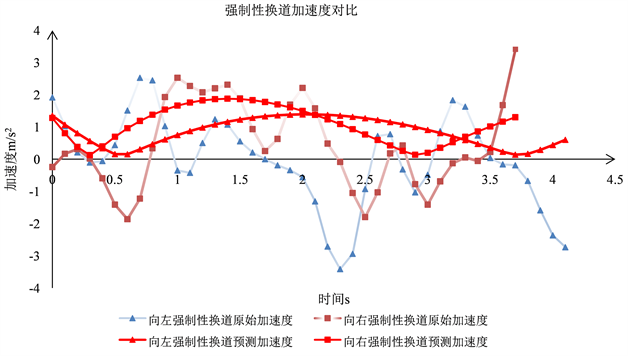
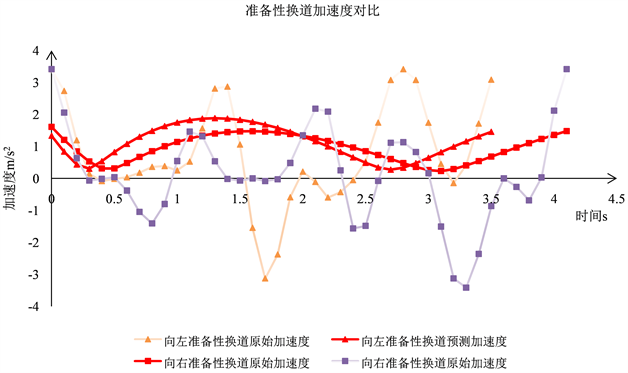
Figure 6. Comparison diagram of original and predicted track acceleration
图6. 原始、预测轨迹加速度对比图
受真实驾驶环境随机性的影响,无论何种换道方式的原始换道的加速度都会出现较为明显的波动,且加速度的峰值较大,能达到4 m/s2。而预测轨迹的加速度较为平顺,波动范围维持在0~2 m/s2的范围内。从评价指标分析表3中可以看出,原始轨迹的加速度的平均值虽然低于预测轨迹,但是在极差和标准差方面要明显高于预测轨迹的,如向左准备性换道,其原始加速度标准差为最大1.56,但预测加速度标准差只有0.52,这表明预测轨迹更为平滑,更加满足舒适性需求。因而,模型较好地满足了舒适性这一条件。
Table 3. Evaluation index analysis of lane changing acceleration
表3. 换道加速度评价指标分析
对单条原始和预测轨迹进行换道过程中基于时间维度上的加速度、速度在的进一步对比分析,从下图7可以发现,随着时间的变化,红色实心点表示的原始速度、加速度呈现无规律的波动,而蓝色实心点表示的预测速度、加速度的波动范围较小,且轨迹平滑。
3) 轨迹稳定性分析
在换道轨迹稳定性评价方面,选择换道过程中的偏转角速度作为评价指标。偏转角速度是指汽车绕垂直轴的偏转,当偏转角速度超过一定的阈值时,车辆有可能会出现甩尾或侧滑的风险。从下图8可以看出,无论是强制性换道还是准备性换道,车辆在原始换道中偏转角速度随时间的变化呈现无规律的波动,且强制性换道和准备性换道的波动峰值分别能达到6˚/s和5˚/s。相比之下,预测轨迹的偏转角速度的波动较平稳,波动峰值均小于2˚/s,且呈现出三角函数的变化规律。因而在稳定性方面,预测轨迹的偏转角速度要明显优于原始轨迹,满足换道过程中的稳定性需求。
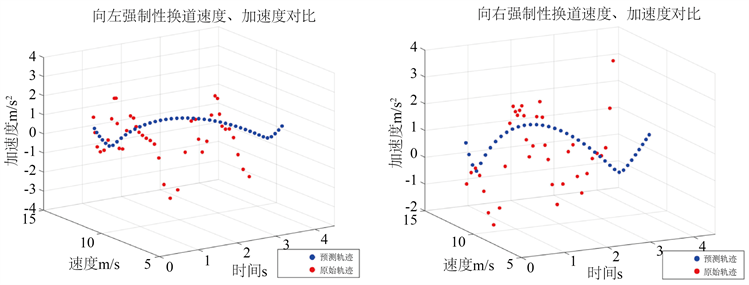
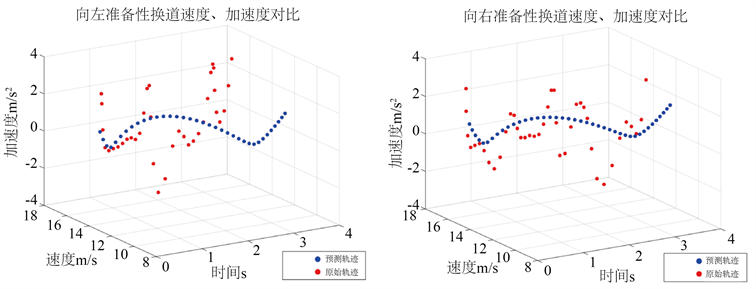
Figure 7. Three dimensional comparison diagram of original, predicted acceleration and velocity
图7. 原始、预测加速度、速度三维对比图
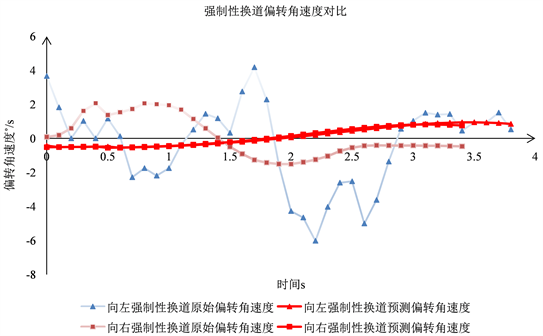

Figure 8. Comparison diagram of deflection angle and velocity of original and predicted trajectories
图8. 原始、预测轨迹偏转角速度对比图
5. 结论
本文选用五次多项式作为轨迹预测优化模型的基础模型,建立(X(t), Y(t))的轨迹模型,并构建效益函数和选取约束条件,应用MATLAB中的fmincon优化工具箱,使用二次序列优化算法对有约束条件的非线性多元函数进行优化求解,以此得到不同换道初始条件下的最优轨迹。对比分析预测轨迹与实际轨迹,横向位移的偏差在0~0.3 m范围内,纵向位移在0~5 m范围内,拟合度较高;预测加速度均值虽然偏大于实际加速度均值,但标准差明显较小,满足了换道的舒适性;预测轨迹的横向偏移角速度在0~2˚/s范围波动,波动性明显低于实际轨迹横向偏移角速度,满足了换道稳定性需求,模型整体可以实现对换道轨迹的预测。
文章引用
刘 磊,王 易,康 凯,李洪庆. 基于运动学原理的换道轨迹预测
Lane Changing Trajectory Prediction Based on Kinematics Principle[J]. 交通技术, 2022, 11(03): 260-274. https://doi.org/10.12677/OJTT.2022.113026
参考文献
- 1. 李玮, 王晶, 段建民. 基于多项式的智能车辆换道轨迹规划[J]. 计算机工程与应用, 2012, 48(3): 242-245.
- 2. 闫尧, 李春书, 唐风敏. 基于五次多项式模型的自主车辆换道轨迹规划[J]. 机械设计, 2019, 36(8): 46-51.
- 3. 房哲哲. 基于深度学习的换道行为建模与分析[D]: [硕士学位论文]. 北京: 北京交通大学, 2018.
- 4. 滕飞. 换道车辆的实时轨迹预测方法研究[D]: [硕士学位论文]. 北京: 北京理工大学, 2016.
- 5. Saito, Y., Kato, S., Itoh, M., et al. (2013) Influence of Deceleration Intention Indicating System of Forward Vehicle on Driver Behavior. In: International Conference on Human Interface & the Management of Information: Information & Interaction for Health, Springer-Verlag, Berlin, 548-557. https://doi.org/10.1007/978-3-642-39215-3_63
- 6. Bie, J., Roelofsen, M., Jin, L., et al. (2013) Lane Change and Overtaking Collisions: Causes and Avoidance Techniques. In: Wireless Vehicular Networks for Car Collision Avoidance, Springer, New York, 143-187. https://doi.org/10.1007/978-1-4419-9563-6_6
- 7. Papadimitriou, I. and Tomizuka, M. (2003) Fast Lane Changing Computations Using Polynomials. IEEE Proceedings of the American Control Conference, Denver, 4-6 June 2003, 48-53.
- 8. 游峰. 智能车辆自动换道与自动超车控制方法的研究[D]: [博士学位论文]. 长春: 吉林大学, 2005.
- 9. 李玮, 高德芝, 段建民, 等. 智能车辆自由换道模型研究[J]. 公路交通科技, 2010, 27(2): 119-123.
- 10. 杨志刚, 戚志锦, 黄燕. 智能车辆自由换道轨迹规划研究[J]. 重庆交通大学学报(自然科学版), 2013, 32(3): 156-160.
- 11. 张颖达, 邵春福, 李慧轩, 等. 基于NGSIM轨迹数据的换道行为微观特性分析[J]. 交通信息与安全, 2015, 33(6): 19-24, 32.
- 12. 兰凤崇, 李诗成, 陈吉清, 等. 考虑操纵稳定性的自动驾驶汽车轨迹综合优化方法[J]. 湖南大学学报(自然科学版), 2019, 46(10): 36-45.
- 13. 叶宗裕. 关于多指标综合评价中指标正向化和无量纲化方法的选择[J]. 浙江统计, 2003(4): 24-25.
- 14. 闫尧, 李春书, 唐风敏. 基于五次多项式模型的自主车辆换道轨迹规划[J]. 机械设计, 2019, 36(8): 42-47.
- 15. 杨世文, 许小健. MATLAB优化工具箱在结构优化设计中的应用[J]. 科学技术与工程, 2008, 8(5): 1347-1349.
- 16. 夏红卫, 文传军. 一类等式约束非线性优化问题的序列二次规划新方法[J]. 重庆师范大学学报(自然科学版), 2014, 31(2): 1-4.