Modeling and Simulation
Vol.
11
No.
06
(
2022
), Article ID:
58117
,
13
pages
10.12677/MOS.2022.116146
基于ADAMS和ISIGHT的双横臂悬架优化
魏绪国
上海理工大学,上海
收稿日期:2022年10月23日;录用日期:2022年11月8日;发布日期:2022年11月21日

摘要
以某皮卡双横臂前悬架为研究对象,在ADAMS/Car中建立悬架动力学虚拟样机模型,并对多体动力学模型进行平行轮跳仿真分析,得出外倾角、主销后倾角及前束角车轮定位参数变化范围不合理。之后运用ADAMS/INSIGHT对不符合要求的定位参数进行灵敏度分析,确定对定位参数影响较大的硬点坐标。最后通过ISIGHT平台和第二代多目标遗传优化算法NSGA-II对外倾角、主销后倾角及前束角变化范围进行多目标优化。结果表明优化后的各定位参数均达到了理想的变化范围,改善了悬架的运动学特性,证明了该优化方法的可行性。
关键词
双横臂悬架,定位参数,灵敏度分析,ISIGHT联合仿真,多目标优化

Optimization of Double Wishbone Suspension Based on ADAMS and ISIGHT
Xuguo Wei
University of Shanghai for Science and Technology, Shanghai
Received: Oct. 23rd, 2022; accepted: Nov. 8th, 2022; published: Nov. 21st, 2022

ABSTRACT
Taking the front suspension of a pickup truck with double wishboneas the research object, the suspension dynamics virtual prototype model was established in ADAMS/Car, and the parallel wheel travel simulation analysis was carried out on the multi-body dynamics model. The results show that the variation range of wheel positioning parameters of camber angle, caster angle and toe angle is unreasonable. Then, ADAMS/INSIGHT is used to analyze the sensitivity of the positioning parameters that do not meet the requirements, and obtain the coordinates of hardpoints that have great influence on the positioning parameters. Finally, the ISIGHT platform and the second generation of multi-objective genetic optimization algorithm NSGA-II were used to optimize the variation range of camber angle, caster angle and toe angle. The results show that the optimized positioning parameters reach the ideal range of variation, and the kinematic characteristics of suspension are improved, which proves the feasibility of the optimization method.
Keywords:Double Wishbone Suspension, Positioning Parameters, Sensitivity Analysis, ISGHT Co-Simulation, Multi-Objective Optimization

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
双横臂悬架目前主要应用于高端轿车、越野车和皮卡商用车中,与麦弗逊悬架相比,双横臂悬架自由度多,横向刚度大,能提升汽车的操纵稳定性。在汽车底盘研发过程中,悬架的运动学特性和弹性运动学特性是研发的关键项目。其中运动学特性主要受悬架各个杆件硬点的空间位置影响。因此悬架硬点设计合理与否将直接影响车轮定位参数的变化,影响汽车的操纵稳定性与安全性。
目前国内有许多学者对悬架运动学特性优化做了研究。魏娟 [1] 等运用ADAMS/Car建立全地形消防车双横臂悬架模型,之后通过ADAMS/INSIGHT对主销内倾角进行灵敏度分析,选择影响较大的硬点进行了优化。郁钦阳 [2] 等在ADAMS/Car建立麦弗逊悬架模型,通过灵敏度分析并结合MOEA/D算法进行硬点优化求解。王军年 [3] 等针对改进电动汽车悬架性能问题,以传统车底盘悬架定位参数为目标,根据灵敏度分析结果,采用ISIGHT软件和NSGA-II算法求解悬架定位参数最优Pareto解集,并得到最优解,确保了电动汽车的操纵稳定性。
本文以某皮卡前双横臂悬架为研究对象,根据CATIA三维数模建立ADAMS/Car多体动力学模型,通过±50 mm的平行轮跳仿真分析,找出不合理的定位参数;接着在ADAMS/INSIGHT中根据前轮定位参数对硬点坐标灵敏度分析的结果,确定优化硬点变量;最后结合INSIGHT软件和第二代遗传算法-NSGA-II进行优化对比,验证优化方案的可行性。
2. 双横臂悬架多体动力学模型建立
2.1. 双横臂悬架模型建立
根据某皮卡前双横臂三维模型,在ADAMS/Car中将悬架简化为上横臂、下横臂,减振器,弹簧,转向节,转向横拉杆和传动轴等部件进行建模。在CATIA三维数模中获取双横臂悬架硬点坐标,如下表1所示。所有部件均为刚性部件,且各个部件之间采用运动副或衬套连接:其中上、下横臂和转向节之间用球形副进行连接;上、下横臂和车架之间采用衬套连接;减振器上端和车架之间采用衬套连接,下端采用衬套和下横臂连接;转向节和转向横拉杆之间采用球形副进行连接;传动轴和轮毂轴承、三相球笼采用等速副进行连接。各部件的质量、质心位置和转动惯量在CATIA中获得。弹簧刚度曲线、减振器阻尼曲线及衬套刚度曲线根据试验数据编写。

Table 1. Hardpoint coordinates of double wishbone suspension
表1. 双横臂悬架硬点坐标
2.2. 转向系统建立
转向系统采用齿轮齿条式进行建模,其部件包含转向方向盘,转向管柱,转向中间轴,转向输入轴,转向齿轮齿条,转向器壳体,转向横拉杆等。其中转向器壳体和车架采用衬套进行连接;齿条和转向器壳体采用移动副连接;转向输入轴和转向器壳体采用转动副连接;转向输入轴和中间轴采用万向副连接;转向中间轴和转向管柱采用万向副连接;转向管柱和车身采用圆柱副连接;转向盘和车身采用转动副连接。所有部件均为刚性部件,部件的质量、质心位置和转动惯量在CATIA中获得。
2.3. 横向稳定杆建立
为提高虚拟样机模型仿真精度,横向稳定杆采用非线性梁式建模,将稳定杆主体离散为多个部分,之后经后处理获得各部分中心坐标输入ADAMS/Car中生成稳定杆主体。稳定杆和车架之间采用衬套连接;稳定杆和稳定杆连杆之间采用万向副连接;连杆和双横臂悬架之间采用球形副连接。
在ADAMS/Car中的Template Builder模式下建立悬架模板,之后在标准模式建立前悬架子系统,转向子系统及横向稳定杆子系统。最后将三个子系统进行装配得到如图1所示的双横臂悬架装配体模型。
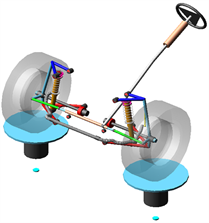
Figure 1. Multi body dynamics model of double wishbone suspension
图1. 双横臂悬架多体动力学模型
3. 双横臂悬架运动学仿真分析
3.1. 仿真试验设计
悬架运动学特性仿真试验主要包括平行轮跳试验和反向轮跳试验,限于篇幅,本文仅进行平行轮跳试验。平行轮跳(Parallel Travel)试验主要模拟车辆在路过障碍物,行驶在起伏路面时由车身姿态的变化引起悬架变化的工况。本文仿真工况设置车轮上下跳动的行程为−50~50 mm,仿真步数为100步。仿真结束后,通过软件的后处理模块查看车轮外倾角、主销后倾角、主销内倾角、前束角随轮跳行程的变化。
3.2. 定位参数分析
车轮外倾角的作用是提高转向轻便性,减轻轮毂外轴承负荷以提高安全性,同时能减小轮胎磨损;此外车轮外倾角能增大汽车不足转向趋势,提升汽车操纵稳定性。理想的车轮外倾角变化范围应在−1˚~0.5˚ [4],且有车轮上跳的过程中外倾角减小,下跳过程中外倾角增大的趋势。图2为外倾角随轮跳变化曲线,其变化范围为−1.1˚~0.66˚,需要进一步优化。
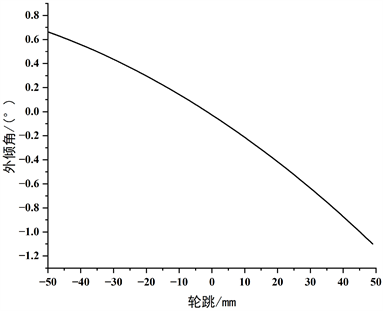
Figure 2. Camber angle with wheel travelchange curve
图2. 车轮外倾角随轮跳变化曲线
主销后倾角的作用主要是保持汽车直线行驶的稳定性,并力图使转弯后的前轮自动回正。后倾角过大会增大转向力矩进而是转向变得沉重。对于前置前驱车,主销后倾角的变化范围一般是0˚~3˚ [5]。图3为主销后倾角随轮跳变化曲线,其变化范围是2.15˚~3.24˚,有待进一步优化改善。
主销内倾角能保证低速行驶的转向回正性能,且能够减小车辆行驶过程中方向盘的冲击力,从而使得转向轻便。对于前置前驱车,主销内倾角在轮跳−50~50 mm的行程中,合理变化范围是8˚~13˚。图4为主销内倾角变化曲线,其变化范围是9.02˚~10.87˚,符合设计要求。
车轮前束角作用是消除行驶过程中因为外倾带来的不理影响,减小汽车轮胎磨损,保证汽直线行驶的稳定性。其合理变化范围是−0.5˚~0.5˚。前束角在上跳时设计值多为0至弱负前束变化值,下跳时候0至正前束 [4]。设计取0附近是为了确保良好的直驶稳定性;而取弱负前束变化是使车辆具有弱不足转向特性的有效手段,进而提升汽车操稳性。图5为前束角随轮跳变化曲线,其变化范围是−0.86˚~0.88˚,需要进一步优化。
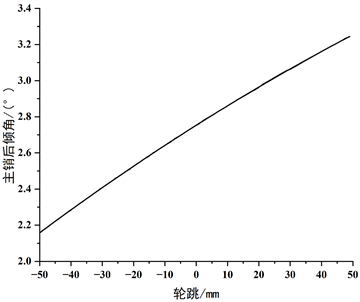
Figure 3. Caster angle with wheel travelchange curve
图3. 主销后倾角随轮跳变化曲线
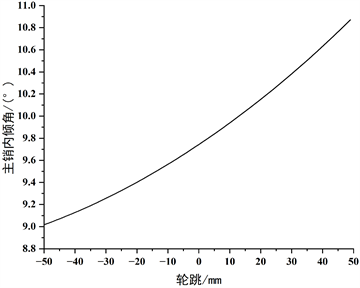
Figure 4. Kingpin inclination angle with wheel travelchange curve
图4. 主销内倾角随轮跳变化曲线
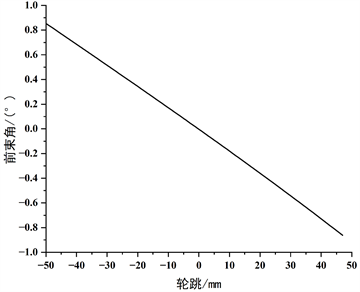
Figure 5. Toe angle with wheel travelchange curve
图5. 前束角随轮跳变化曲线
4. 灵敏度分析
从上述分析可知车轮外倾角、主销后倾角,前束角变化范围偏大,有待进一步优化,因此需要对双横臂悬架硬点进行调整。但是双横臂悬架硬点较多,且硬点和各个定位参数之间并不是简单的线性对应关系,即定位参数可能受到多个硬点坐标的影响,同一个悬架硬点的变化可能影响多个定位参数同时变化。因此为减少工作量,降低时间成本,进行灵敏度分析,运用DOE试验设计方法考察各个硬点坐标变量对定位参数变化的影响程度。
本文采用ADAMS/INSIGHT进行灵敏度分析,具体分为以下四个步骤:
a) 选取设计变量。将上控制臂前点(uca_front)、上控制臂后点(uca_rear)、上控制臂外点(uca_outer)、下控制臂前点(lca_front)、下控制臂后点(lca_rear)、下控制臂外点(lca_outer)以及转向横拉杆内点(tierod_inner)、转向横拉杆外点(tierod_outer)的X、Y、Z坐标作为设计变量,共24个设计变量。
b) 确定优化目标。将仿真得到的外倾角、主销后倾角、前束角的绝对值最大值设为优化目标,考察在仿真试验的过程中各硬点坐标的变化对三个定位参数的影响程度,尽可能的减小变化范围,ADAMS/Car中优化目标具体设置如下图6所示。

Figure 6. Optimization target setting
图6. 优化目标设置
c) 创建设计矩阵并选择设计策略。由于底盘零部件相对位置的限制,给定设计变量变化范围±5 mm;采用DOE Screening(2 Level)策略创建设计矩阵,选取线性模型拟合参数和目标之间的关系。如果选择考虑所有组合的全因素试验(Full Factorial),将会运行224次仿真,为了缩短运行时间,采用部分因素试验(Fractional Factorial),共运行1024次试验,足以实现所有的可能情况。创建设计矩阵及选择设计策略的方法如图7所示。
d) 分析试验结果。经过1024次迭代后灵敏度分析完成,其拟合结果如表2所示。ADAMS/INSIGHT通过方差进行拟合分析。R2和R2adj表示拟合的好坏,R2在0~1之间,越大越好,好的拟合应该大于0.9;R2adj一般小于R2,R2adj的值越接近1越好;P表明拟合表达式中是否有有用项,P越小,说明拟合表达式中的有用项越多 [6];R/V则表明模型计算值和原始数据点之间的关系,该值越高越好;R/V大于10 表明模型的预测结果很好,若R/V小于4则表明模型预测结果较差。
e)确定影响因素。在ADAMS/INSIGHT中可导出各个定位参数对悬架硬点坐标的灵敏度图,如下图8~10所示。其中,Effect指的是某个硬点坐标变化对悬架定位参数的影响。这一影响是指当其他硬点坐标(因子)在平均水平下时,该硬点坐标在最大值与在最小值时对应的定位参数(响应量)之差。该影响存在正负之分,如下所示图中,蓝色的柱状表示正的影响效应,红色的柱状则表示负的影响效应。正的表示响应值随着因子的增大而增大;负的表示响应值随着因子的增大而减小。但是由于硬点坐标和定位参数之间的关系并不是简单的线性对应关系,所以因子的最小和最大值不一定产生最小和最大响应值,而是最小或最大响应值有可能在曲线中间出现。鉴于这种原因我们考虑Effect%,它是指其他因子在平均值时,该因子的影响与其在平均值时的响应值之比,其更能表现因硬点坐标改变引起的悬架定位参数的变化。
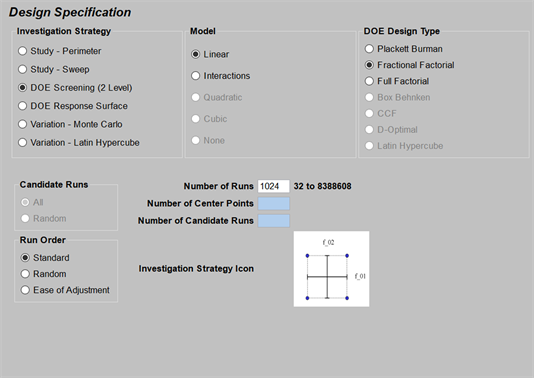
Figure 7. Create design matrix, determine experiment strategy and number of operations
图7. 创建设计矩阵、确定试验策略与运算次数
Table 2. Fitting reliability index value
表2. 拟合可靠度指标值
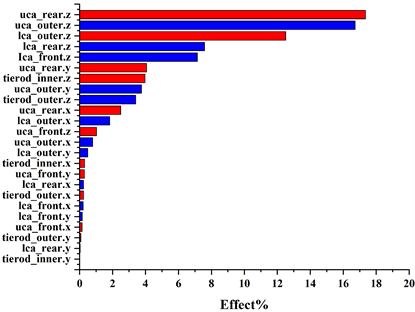
Figure 8. Diagram of influence of wheel camber angle
图8. 外倾角影响程度图
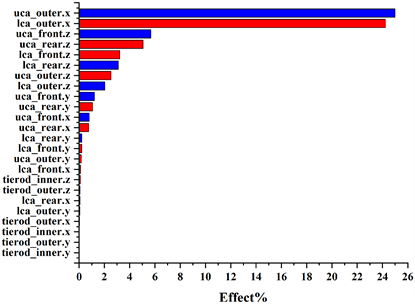
Figure 9. Diagram of influence of wheel caster angle
图9. 后倾角影响程度图
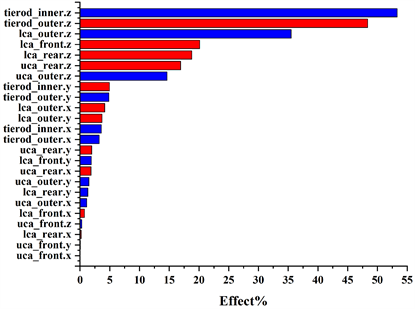
Figure 10. Diagram of influence of wheel toe angle
图10. 前束角影响程度图
由图8可知,上横臂后侧硬点z坐标,上横臂外侧硬点z坐标以及下横臂外侧硬点z坐标对外倾角的影响程度较大;由图9可知上横臂外侧硬点x坐标,下横臂外侧硬点x坐标对主销后倾角的影响程度较大;由图10可知对前束角影响较大的因素是转向横拉杆内侧硬点z坐标,转向横拉杆外侧硬点z坐标,其次是下横臂外侧硬点z坐标。并且由上图灵敏度分析结果可知,同一个硬点坐标同时多个定位参数有较大影响,例如下横臂外侧硬点z坐标,其对外倾角和前束角均有较大的影响。综上分析考虑,将上横臂后侧硬点(uca_rear) z坐标,上横臂外侧硬点(uca_outer) z坐标以及下横臂外侧硬点(lca_outer) z坐标,上横臂外侧硬点(uca_outer) x坐标,下横臂外侧硬点(lca_outer) x坐标,转向横拉杆内侧硬点(tierod_inner) z坐标,转向横拉杆外侧硬点(tierod_outer) z坐标作为待优化硬点坐标。
5. ISIGHT硬点优化
5.1. ISIGHT优化模型建立
由于ADAMS/INSIGHT与ADAMS通过内置通道数据传输,在变量与目标的特殊化处理上不易实现,优化结果往往不够理想,通常需要多次优化,增加时间成本。因此本文采用ISIGHT平台进行联合仿真设计优化。ISIGHT进行优化时需要与ADAMS进行集成,需编写用于启动调用ADAMS/Car的(.bat)执行批处理文件和包含硬点、轮跳仿真和结果输出等命令的(.cmd)命令文件 [7],之后采用INSIGHT平台的Simcode组件运行批处理文件,Matlab组件用于悬架硬点变量的映射 [8]。通过INSIGHT平台的Optimization组件进行优化,集成后的多目标优化模型如图11所示。该优化模型的工作原理是各设计变量通过在Simcode组件中运行ADAMS/Car得到仿真结果,若仿真结果不满足目标条件,则基于opt组件运用NSGA-II算法更新得到新的一组硬点坐标,之后基于Matlab变量数据映射,输入Simcode组件再次进行仿真,直至迭代出满足目标函数的最优解。
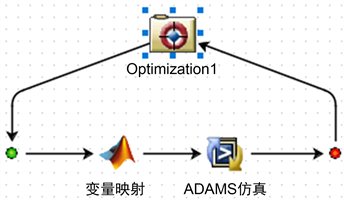
Figure 11. Hardpoint optimization model of double wishbone suspension
图11. 双横臂悬架硬点优化模型
5.2. 优化设计
与灵敏度分析DOE设计相似,双横臂悬架硬点优化设计可分为以下几步。
5.2.1. 确定优化目标
根据第二节对悬架定位参数合理变化范围的分析,设定外倾角、主销后倾角和前束角的绝对值最大值为优化目标,为简化仿真计算,将外倾角和前束角变化范围采用斜率表示,并分别给定合适的斜率目标值。抽象为数学表达式的目标函数如式(1)所示:
(1)
式中,caster为平行轮跳±50 mm的过程中主销后倾角的响应值,camberrate,toerate分别为外倾角和前束角响应曲线的斜率。
5.2.2. 设计优化变量及约束条件
根据第三节灵敏度分析结果,将上横臂后侧硬点(uca_rear) z坐标,上横臂外侧硬点(uca_outer) z坐标以及下横臂外侧硬点(lca_outer) z坐标,上横臂外侧硬点(uca_outer) x坐标,下横臂外侧硬点(lca_outer) x坐标,转向横拉杆内侧硬点(tierod_inner) z坐标,转向横拉杆外侧硬点(tierod_outer) z坐标作为设计变量,考虑到底盘部件空间位置分配,选取硬点坐标变化范围±5 mm。
5.2.3. 选择优化方法
由于悬架硬点坐标和外倾角、主销后倾角、前束角定位参数是复杂且非线性关系,因此选用第二代非劣排序遗传算法-NSGA-II算法进行多目标优化。NSGA-II算法中的种群规模的大小决定了优化计算的复杂程度,遗传代数决定了求解的收敛性,交叉概率则影响求解的多样性 [9]。又因为多目标优化的流程组件中的各个设计变量均需要调用ADAMS/CAR中进行仿真,计算时间较长。综合考虑以上情况,设定种群大小为12,遗传代数为20,交叉概率为0.9。
5.2.4. 优化结果分析
本次优化过程共进行241次迭代,其中外倾角和前束角斜率优化历程如下图12,图13所示。最优解出现在第161次迭代中,对应的目标响应外倾角曲线斜率为−0.0146,前束角曲线斜率为−0.0086。

Figure 12. Camber slope optimization process
图12. 外倾角斜率优化历程

Figure 13. Toe slope optimization process
图13. 前束角斜率优化历程
在总结报告中提取最优解下的硬点坐标值,将优化后得到的硬点坐标输入ADAMS/Car中,硬点优化前后坐标如下表3所示。
Table 3. Comparison of hardpoint coordinates before and after optimization
表3. 硬点坐标优化前后对比
接着进行±50 mm的平行轮跳仿真,并与优化前的结果曲线进行对比分析,优化前后定位参数结果曲线对比如下图14~16所示。其中,实线为优化前各定位参数变化范围曲线,虚线为优化后的各定位参数变化范围曲线。提取各曲线变化范围数据,经后处理得到如下表4所示的优化前后定位参数对比结果。
Table 4. Comparison of front wheel alignment parameters before and after optimization
表4. 优化前后前轮定位参数对比表
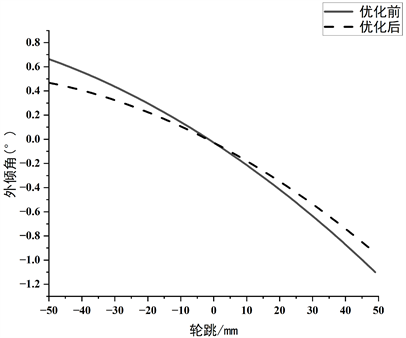
Figure 14. Comparison of camber angle change curves before and after optimization
图14. 优化前后外倾角变化曲线对比
由图14可知,优化后的车轮外倾角变化范围由−1.1˚~0.66˚变化为−0.96˚~0.46˚,变化率相对减少了19.32%,变化范围有所减小。外倾角变化范围缩小使得汽车转向轻便,提升轮毂外轴承和轮胎的使用寿命,改善了悬架运动学特性,达到了设计要求。
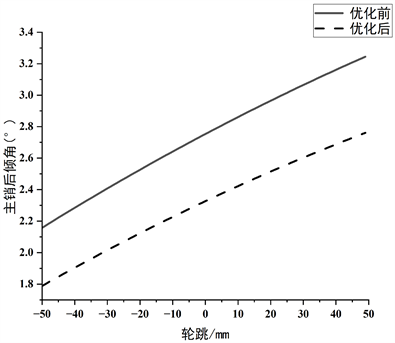
Figure 15. Comparison of caster angle change curves before and after optimization
图15. 优化前后主销后倾角变化曲线对比
由图15可知,优化后的主销后倾角变化范围由2.15˚~3.24˚变化为1.78˚~2.76˚,优化了10.1%,主销后倾角最大值在3˚以内,处在合理的变化范围内。主销后倾角减小有利于转向轻便,保持汽车自动回正能力。
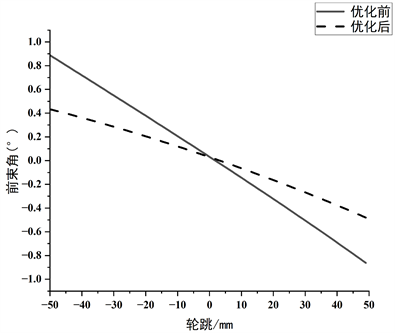
Figure 16. Comparison of toe angle change curves before and after optimization
图16. 优化前后前束角变化曲线对比
由图16可知,优化后的车轮前束角变化范围由−0.86˚~0.88˚变化为−0.49˚~0.43˚,优化了47.13%,优化效果较好,优化后的变化范围处在−0.5˚~0.5˚之内,符合设计要求。前束角的减小能增加汽车直驶稳定性,减少轮胎磨损,同时保证了汽车具有不足转向特性,有利于提升汽车操纵稳定性。
6. 结论
本文针对某皮卡前双横臂悬架进行了灵敏度分析及优化,改善了其悬架运动学特性,结论如下。
1) 根据双横臂悬架三维数模在ADAMS/Car中建立多体动力学模型,并通过平行轮跳仿真分析其定位参数变化合理性。
2) 运用ADAMS/INSIGHT进行灵敏度分析,找出对定位参数影响较大的硬点坐标,通过虚拟仿真试验降低工作量,缩短开发周及降低成本。
3) 通过ADAMS和ISIGHT联合仿真,结合NSGA-II算法求解悬架定位参数最优解集,得到最优解。并经过优化前后结果对比分析,验证此优化方法的可行性,可为悬架其他性能指标优化提供参考。
文章引用
魏绪国. 基于ADAMS和ISIGHT的双横臂悬架优化
Optimization of Double Wishbone Suspension Based on ADAMS and ISIGHT[J]. 建模与仿真, 2022, 11(06): 1546-1558. https://doi.org/10.12677/MOS.2022.116146
参考文献
- 1. 魏娟, 王志雷, 窦登科, 杨广元. 全地形消防车双横臂悬架仿真分析与优化[J]. 制造业自动化, 2021, 43(7): 73-76.
- 2. 郁钦阳, 吕泽苗, 马云睿, 丁超杰. 基于MOEA/D算法的麦弗逊式悬架优化[J]. 农业装备与车辆工程, 2022, 60(9): 157-162.
- 3. 王军年, 刘鹏, 杨钫, 靳立强, 付铁军. 轮毂电机驱动电动汽车双横臂前悬架运动学优化[J]. 汽车工程, 2021, 43(3): 305-312.
- 4. 日本自动车技术会. 汽车工程手册5 [M]. 中国汽车工程学会, 译. 北京: 北京理工大学出版社, 2010: 19-20.
- 5. 陆嘉敏. 汽车操纵稳定性及行驶平顺性的仿真分析与优化研究[D]: [硕士学位论文]. 上海: 上海交通大学, 2018.
- 6. 王琳, 韦鹏, 梁玉瑶. 基于ADAMS的双横臂前悬架参数优化设计[J]. 噪声与振动控制, 2019, 39(4): 120-124.
- 7. 陈兴. 多连杆悬架硬点坐标的多目标优化与分析[D]: [硕士学位论文]. 上海: 上海理工大学, 2014.
- 8. 王大伟. 基于Isight的五连杆悬架硬点优化设计[J]. 汽车技术, 2022(1): 53-57.
- 9. 冯金芝, 杨涛, 郑松林. 基于NSGA-II算法的悬架结构硬点多目标优化[J]. 汽车技术, 2014(12): 5-8+53.