Applied Physics
Vol.
13
No.
07
(
2023
), Article ID:
69071
,
8
pages
10.12677/APP.2023.137037
不同湍流模型对SUBOFF潜艇阻力预报的 影响分析
尤一*,刘绪,胡翠平
海军潜艇学院基础部,山东 青岛
收稿日期:2023年6月8日;录用日期:2023年7月13日;发布日期:2023年7月21日

摘要
为了分析不同湍流模型对潜艇阻力数值仿真结果的影响,本文使用基于有限体积法的CFD商业软件,结合不同湍流模型对SUBOFF潜艇的水动力特性进行了仿真计算和对比分析。通过应用不同湍流模型的仿真结果与水池实验结果的对比,得出的结论为应用雷诺应力模型的计算结果最接近实验值,模拟效果最好。
关键词
计算流体力学,潜艇阻力,湍流模型

Analysis of the Influence of Different Turbulence Models on Resistance Prediction for SUBOFF Submarine
Yi You*, Xu Liu, Cuiping Hu
Department of Basic, Naval Submarine Academy, Qingdao Shandong
Received: Jun. 8th, 2023; accepted: Jul. 13th, 2023; published: Jul. 21st, 2023

ABSTRACT
In order to analyze the influence of different turbulence models on the numerical simulation results of submarine resistance, this paper uses the CFD commercial software based on VOF method to simulate and compare the hydrodynamic characteristics of the SUBOFF submarine with different turbulence models. By comparing the simulation results of different turbulence models with the results of the experiment, the conclusion is that the calculation results of the Reynolds Stress Model are the closest to the experimental values, and the results of the simulation are the best.
Keywords:CFD, Submarine Resistance, Turbulence Models

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
潜艇在水下执行任务的过程中,精准稳定、灵活机动地定向、定深航行是保证其能发挥作用的关键,因此,操纵性对于保证潜艇航行安全和充分发挥潜艇的总体性能具有重要的意义。潜艇阻力的预报是潜艇操纵性评估和研究的基础,要设计推进器并确定所需的功率必须对阻力进行精确评估 [1] 。
目前阻力的预报一般有三种方法:理论法、实验法和数值法 [2] 。理论法是基于流体运动的理论模型,但是由于当前数学发展水平的限制,还只能局限于比较简单的模型,对于比较复杂的流体运动计算效果并不好。实验法是预报潜艇阻力比较可靠的方法,但是实验方法开展所需要的水池或风洞造价高、维护成本大,由于资金、设备、人力、场所等各方面条件的限制,并不容易开展,所开展的大部分也都是模型实验,而模型实验和实尺度结果之间的相似关系转换也是实验研究面临的重要问题。
近些年来,随着计算机水平的飞速发展,逐渐出现了一种新的方法:数值法。这种方法是流体力学与计算机科学、数值数学结合形成的一种研究方法,也叫做计算流体力学(Computational Fluid Dynamics, CFD),这种方法相对于理论法可以解决很多复杂流动问题,与实验法相比所花费的成本和时间又更少,因此数值仿真方法逐渐被广泛应用于舰艇研究中。Tahara等人在2006年使用两种不同的RANS求解器对KCS模型计算了拖曳试验和自推进试验的数值结果,并与实验结果进行了比较 [3] 。Philips等人在2008年使用数值方法重点针对水下航行器研究了叶片单元动量理论与RANS方法的耦合问题 [4] 。Budak等人通过CFD方法研究了艇艏和艇艉的几何形状对DARPA光艇阻力的影响 [5] 。数值仿真技术也越来越多的应用到潜艇阻力的预报研究中。
在数值仿真的阻力计算中,湍流模型的选择至关重要,但是目前所提出的湍流模型都是基于一些不同的特定假设,所以并没有某一种湍流模型可以适合计算和处理所有情况的流体运动,因此本文将针对不同湍流模型下的潜艇阻力计算结果进行对比,为潜艇数值仿真中的湍流模型选择提供参考。
2. 计算模型
2.1. 控制方程
流体的流动规律满足流体的控制方程,即连续性方程(质量守恒方程)和N-S方程(动量方程),因为水可以近似看作不可压缩流体,因此控制方程可以写为:
(1)
(2)
其中: 代表速度分量的时均值(i, j = 1, 2, 3), 代表不同的方向,ρ代表流体的密度,P代表流体压强的时均值, 代表重力加速度的分量,μ代表流体的动力粘性系数, 为脉动速度分量, 代表雷诺应力项。从方程组的构造中可以看出,如果没有雷诺应力项,方程组是可以实现封闭的,但是由于雷诺应力项的存在,方程组不能被直接求解,因此需要引入新的方程来实现方程组的封闭,这就是湍流模型产生的原因。
狭义上的湍流模型就是指所引入的计算雷诺应力的数学关系式,通过这个关系式和流体控制方程一起形成封闭方程组,这样就可以对流体运动进行求解。本文中采用了Standard k-ε模型、RNG k-ε模型、雷诺应力模型(RSM)三种湍流模型,具体的公式可以参阅文献 [6] 。
2.2. SUBOFF潜艇模型
本文中使用的潜艇模型为SUBOFF AFF-1潜艇模型 [7] ,SUBOFF计划是由美国国防高等研究计划署(DARPA)所提出的潜艇研究项目,这个项目的目的是为潜艇的设计制造提供详细的水动力参数和流场信息。目前SUBOFF模型被很多国家用作标准模型来进行全面的水动力、流场的研究工作,提供了速度场、压力场、粘性阻力等大量流动数据。
图1所示为SUBOFF AFF-1模型 [7] ,全长为4.356米,表1中给出了潜艇模型的主尺度。
潜艇模型的网格处理采用多块对接的结构化网格,边界层及艇体附近进行细化,图2和图3分别展示了计算域和潜艇表面附近处的网格划分,图4给出了艇体表面的网格分布。
![]()
Figure 1. Geometric model of SUBOFF submarine
图1. SUBOFF潜艇的几何模型

Table 1. Principal dimensions of DARPA SUBOFF submarine
表1. DARPA SUBOFF潜艇的主尺度
![]()
Figure 2. Mesh of computational domain
图2. 计算域网格
![]()
Figure 3. Mesh near the surface of submarine
图3. 潜艇表面附近的网格
![]()
Figure 4. Mesh of submarine surface
图4. 潜艇表面网格
3. 算例分析
3.1. 水动力系数验证
在本节中将会应用上述三种湍流模型对潜艇的水动力参数进行计算,并与Huang等人于1992年所开展的实验研究数据 [7] 进行对比。实验中潜艇模型的航速定为3.34 m/s,图5和图6分别给出了三种湍流模型的计算下得到的潜艇表面压强系数(Cp)和摩擦阻力系数(Cd)的分布图,图中上中下分别对应的是采用Standard k-ε模型、RNG k-ε模型和雷诺应力模型(RSM)计算的结果,从图5中可以看出三种模型的计算结果相差不大,相比来说RSM模型光顺性更好,但是图6中的摩阻系数相差很大,可以看出Standard k-ε模型计算出的阻力系数分布比较混乱,非连续性比较明显,RNG k-ε模型的结果有所改进,但仍然并不理想,相比而言RSM模型的结果分布非常光顺,表现出很好的连续性。为了进一步量化模型计算的精确性,图7、图8中分别给出了潜艇模型表面上中纵剖面处的压强系数和摩阻系数沿艇长方向的变化曲线,从图中对比可以看出,正如图5中所示,三种模型计算的压强系数均与实验结果相差不大,但是在艇艉部分,RSM模型要比其他两种模型更加贴近实验值,精确度更高,而从图8中的对比可以看出RSM模型计算的摩阻系数与实验值的一致性更好,其他两种模型的计算结果与实验值相差比较大,RNG k-ε模型相较于Standard k-ε模型略有改进,但误差仍然较大。图9中给出了位于x = 0.904Loa处的横剖面上轴向速度的分布曲线,从图中可以看出在潜艇表面附近处,RSM模型的计算结果更加接近于实验数据,随着距离表面越远,三种模型的计算结果逐渐接近,均与实验值相差不大。
![]()
Figure 5. Pressure coefficient distribution on the surface of submarine
图5. 潜艇表面的压强系数分布
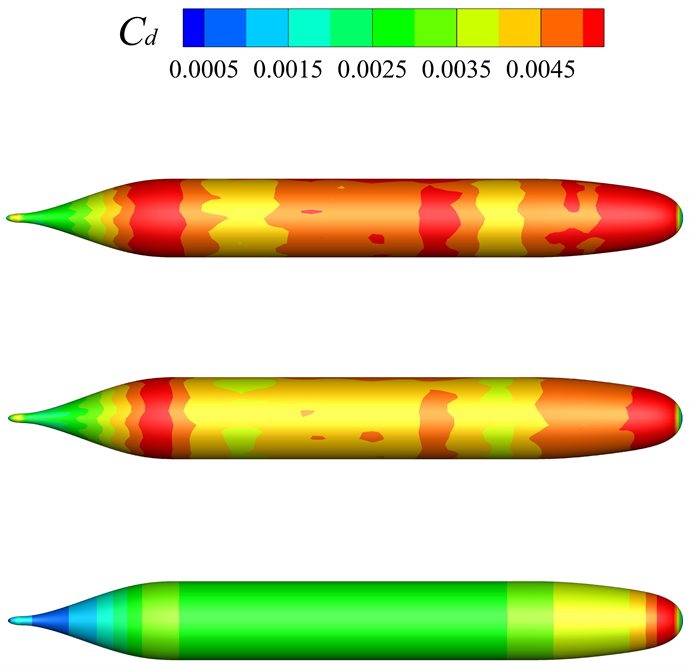
Figure 6. Friction coefficient distribution on the surface of submarine
图6. 潜艇表面的摩阻系数分布
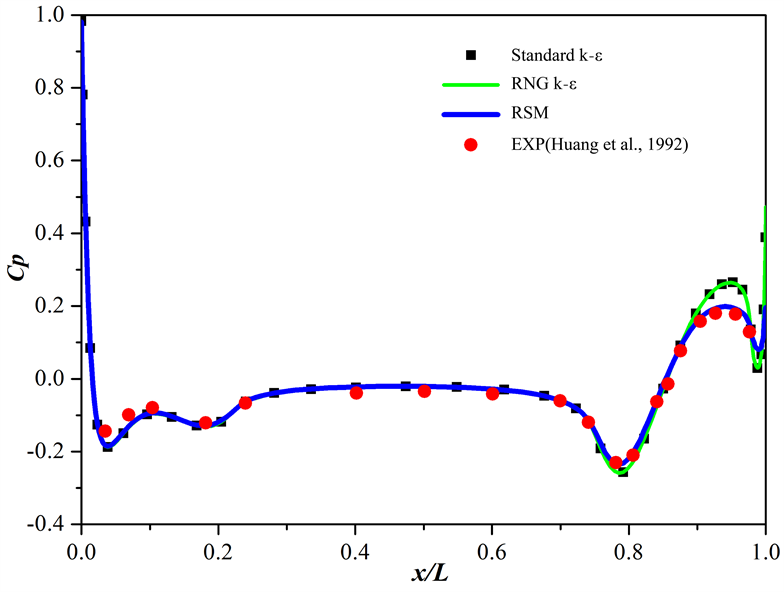
Figure 7. The variation of pressure coefficient along the longitudinal section in center plane
图7. 中纵剖面上的压强系数的变化

Figure 8. The variation of friction coefficient along the longitudinal section in center plane
图8. 中纵剖面上的摩阻系数的变化
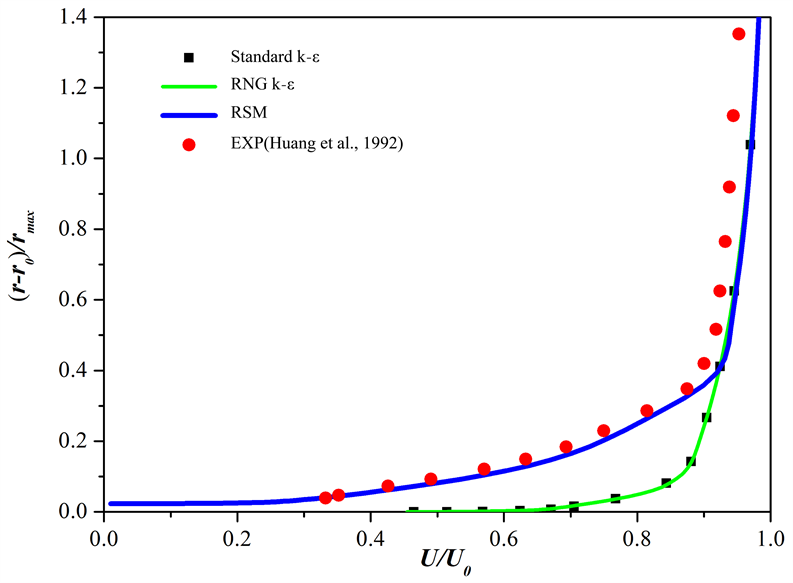
Figure 9. The distribution of axial velocity at x = 0.904Loa
图9. x = 0.904Loa处的横剖面上轴向速度的分布曲线
3.2. 阻力验证
接下来对潜艇模型在不同航速下受到的总阻力进行计算,将三种湍流模型计算得到的总阻力值与Liu和Huang在1998年开展的实验结果 [8] 进行对比,所采用的航速分别为:3.046 m/s,5.144 m/s,6.091 m/s,7.161 m/s,8.231 m/s,9.255 m/s,图10中给出了不同工况下总阻力的对比,可以看出RSM模型计算的总阻力值在所有计算工况下都与实验值保持了很好的一致性。表2、表3、表4分别给出了数值计算结果与实验值之间的相对误差,从具体的误差中同样可以看出RSM模型在每一个航速工况下均有比较好的误差精度。

Figure 10. Comparison of total resistance values at different speeds
图10. 不同航速下的总阻力值对比
Table 2. Comparison of the total resistance between numerical results calculated by Standard k-ε model and experimental results at different speeds
表2. 不同航速下Standard k-ε模型计算的总阻力值与实验值对比
Table 3. Comparison of the total resistance between numerical results calculated by RNG k-ε model and experimental results at different speeds
表3. 不同航速下RNG k-ε模型计算的总阻力值与实验值对比
Table 4. Comparison of the total resistance between numerical results calculated by RSM and experimental results at different speeds
表4. 不同航速下雷诺应力模型计算的总阻力值与实验值对比
4. 结论
本文采用三种不同的湍流模型(Standard k-ε、RNG k-ε、RSM)对潜艇水动力特性进行了数值仿真,并将结果与实验数据进行了对比,从对比结果中可以看出:Standard k-ε模型对潜艇水动力特性的计算预报结果并不准确,压强场的计算比较光顺(局部存在不连续现象),数值方面整体看也比较准确,但是局部(尤其是艇艉部分)与实验值相差较大,这说明Standard k-ε模型并不适合用来进行潜艇水动力计算。RNG k-ε模型是对Standard k-ε模型的改进,但是其仍然沿用了k-ε模型中的涡粘性假设,湍流各向同性使得预报结果与真实结果相差仍然较大。雷诺应力模型相比于前两者并没有采用涡粘性假设,而是考虑了湍流的各向异性,对雷诺应力进行了完全求解,因此更加贴近真实的物理机理,预报结果也与实验值满足更好的一致性,计算精度更高,更适合于潜艇水动力特性的数值模拟计算。
文章引用
尤 一,刘 绪,胡翠平. 不同湍流模型对SUBOFF潜艇阻力预报的影响分析
Analysis of the Influence of Different Turbulence Models on Resistance Prediction for SUBOFF Submarine[J]. 应用物理, 2023, 13(07): 330-337. https://doi.org/10.12677/APP.2023.137037
参考文献
- 1. Sezen, S., Dogrul, A., Delen, C. and Bal, S. (2001) Investigation of Self-Propulsion of DARPA SUBOFF by RANS Method. Ocean Engineering, 150, 258-271. https://doi.org/10.1016/j.oceaneng.2017.12.051
- 2. Dacles-Mariani, J., Zilliac, G.G., Chow, J.S. and Brad-shaw, P. (1995) Numerical/Experimental Study of a Wingtip Vortex in the Near Field. AIAA Journal, 33, 1561-1568. https://doi.org/10.2514/3.12826
- 3. Tahara, Y., Wilson, R.V., Carrica, P.M. and Stern, F. (2006) RANS Simulation of a Container Ship Using a Single-Phase Level-Set Method with Overset Grids and The Prognosis for Extension to a Self-propulsion Simulator. Journal of Marine Science and Technology, 11, 209-228. https://doi.org/10.1007/s00773-006-0231-8
- 4. Philips, A.B., Turnock, S.R. and Furlong, M. (2008) Com-parisons of CFD Simulations and In-Service Data for the Self-Propelled Performance of an Autonomous Underwater Vehicle. 27th Symposium on Naval Hydrodynamics, Seoul, 5-10 October 2008.
- 5. Budak, G. and Beji, S. (2016) Computational Resistance Analyses of a Generic Submarine Hull Form and Its Geometric Variants. Journal of Science and Technology, 11, 77-86.
- 6. Chase, N. and Carrica, P.M. (2013) Submarine Propeller Computations and Application to Self-propulsion of DARPA SUBOFF. Ocean Engineering, 60, 68-80. https://doi.org/10.1016/j.oceaneng.2012.12.029
- 7. Huang, T., Liu, H.L., Groves, N., Forlini, T., Blanton, J. and Gowing, S. (1992) Measurements of Flows over an Axisymmetric Body with Various Appendages in a Wind Tunnel: The DARPA SUBOFF Experimental Program. 19th Symposium on Naval Hydrodynamics, Seoul, August 1992, 312-346.
- 8. Liu, H.L. and Huang, T. (1998) Summary of DARPA SUBOFF Experimental Program Data. Naval Surface Warfare Center Carderock Division (NSWCCD), West Bethesda, MD, USA. https://doi.org/10.21236/ADA359226
NOTES
*通讯作者。