Hans Journal of Nanotechnology
Vol.
09
No.
03
(
2019
), Article ID:
31587
,
7
pages
10.12677/NAT.2019.93010
Regeneration Cycle of Energy-Containing Working Quality and Application of Nano-Fuel Cell in Confined Space
Guowei Yang1, Kun Fang1,2, Qianchao Liang1
1College of Power Engineering, Naval University of Engineering, Wuhan Hubei
2Early Warning Intelligence Department, Air Force Early Warning Academy, Wuhan Hubei

Received: Jul. 16th, 2019; accepted: Jul. 30th, 2019; published: Aug. 6th, 2019

ABSTRACT
In order to solve the problems of difficult acquisition and poor persistence of energetic working fluids when nano-robots work in closed space, in this paper, a nano fuel cell system with regenerative cycle of energetic working substance in closed space is constructed. By simulating the external forces on nano-robots, it is verified that the power output of nano-biofuel cells based on glucose can fully meet the movement requirements of nano-robots. At the micro-scale, the size, shape and liquid temperature of nano-robots have a great impact on the power density of Nano-fuel cells.
Keywords:Nano-Fuel Cell, Circulatory System, Nano-Robot, Nanotechnology
密闭空间下含能工质的再生循环与纳米燃料电池的应用
杨国威1,方昆1,2,梁前超1
1海军工程大学动力工程学院,湖北 武汉
2空军预警学院预警情报系,湖北 武汉
收稿日期:2019年7月16日;录用日期:2019年7月30日;发布日期:2019年8月6日

摘 要
针对纳米机器人在密闭空间条件下工作,含能工质获取困难、持久性较差等问题,本文构建了密闭空间下含能工质再生循环的纳米燃料电池系统。通过对纳米机器人所受外界的外作用力进行仿真,验证了基于葡萄糖的纳米生物燃料电池功率输出能够完全满足纳米机器人的运动需求,并得出在微观尺度下,纳米机器人体积尺度、形状大小及液体温度都对纳米燃料电池的功率密度有着极大影响。
关键词 :纳米生物燃料电池,循环系统,纳米机器人,纳米技术

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
伴随着扫描隧道显微镜的发明,人类步入了微观世界。随着微纳领域科学和MEMS领域技术的飞速发展,大量纳米级的传感器机器人被发明出来 [1] ,这些纳米机器人在军事、医疗等方面发挥了举足轻重的作用。而纳米机器人往往在一些密闭空间的条件下工作,由于其体积微小导致携带的含能工质有限,而含能工质一旦消耗完毕,就需要通过外界进行补充,使得纳米机器人续航效能十分低下。
为解决纳米机器人能源持久性问题,本文构建了可循环式的纳米生物燃料电池系统,利用密闭工作环境内的葡萄糖作为含能工质持续为纳米机器人供能,利用光合反应原理对反应剩余物(主要是CO2、H2O)进行循环再生,实现了纳米机器人的含能工质循环自供能。最后,计算了在密闭空间下,不同温度条件对燃料电池效率输出和纳米机器人运动能力方面的相互影响。
2. 纳米机器人
随着纳米材料的发展,纳米级的传感器也得到了极大的发展,传感器能感知各种信号,如PH值、速度、力的变化以及空间维度的变化等,这些信号的变化将会通过传感器发送给纳米级控制器,由纳米级控制器做出决策,控制纳米机器人的各种动作,实现纳米机器人的智能化。纳米机器人(如图1)由纳米控制器、纳米级分子发动机、纳米燃料电池,纳米传感器等构成。

Figure 1. Nano robot
图1. 纳米机器人
阳极反应:
阴极反应:
总反应:
其中鞭毛是仿照大肠杆菌和人类精细胞而做的,相当于整个分子机器人的螺旋桨。已有研究证明,当鞭毛逆时针旋转的时候,大肠杆菌会向正向方向移动,当鞭毛顺时针旋转的时候,大肠杆菌会受到前进的阻力而发生翻转,鞭毛的旋转方向取决于纳米芯片给它的信号 [2] 。
3. 纳米生物燃料电池
3.1. 发电原理
燃料电池是一种将化学能转化为电能的能量转化装置,按照电化学原理,将存在燃料和氧化剂中的化学能直接转化为电能,该过程是一个氧化还原反应过程。燃料电池由阳极、阴极、电解质和外部电路所构成。其中燃料通入阳极,氧化剂通入阴极,燃料在阳极放出电子,电子流经外电路通向阴极并于氧化剂结合生成离子,在电场作用下,通过电解质迁移到阳极于燃料发生反应,构成了一个闭合回路,形成电流。
中国科学院潘曹峰等人已经利用模板辅助压力注入法和电纺丝法等途径成功制备了Nafion纳米线 [3] ,研究证明质子可通过此纳米线,使得纳米燃料电池有了一种新思路。纳米燃料电池原理如下:纳米线横跨阳极区和阴极区,在两个电极之间加一根纳米级的二氧化硅棒,用以分隔阳极区和阴极区,分别在阳极和阴极加入对应的催化剂,将燃料通入燃料槽,阳极区生成的H+通过纳米线到达阴极区,并与阴极区的氧化剂氧气生成水。室温下,该纳米燃料电池的最大电流密度(Id)约为1.21 μA/μm2 (零负载时取得,相当于4.19 μA),最大功率约为0.33 μW,在333 K下的性能有明显提高,开路电压增加约100 mV,最大电流密度增加约3倍,而最大功率约为1.66 μW [4] 。
由于上述的纳米燃料电池阳极和阴极采用相同催化剂,所以其阴极和阳极必须严格隔开,否则就不能发生氧化还原反应发电,且催化剂采用Pt/C等,催化效率不高,且反应太过于剧烈。基于纳米燃料电池的上述缺点,同时功率密度又要求不太高,可运用生物能源作为含能工质,制成纳米级的生物燃料电池。由于纳米机器人现阶段主要应用于生物体内,可使用生物主要能量来源且广泛存在于生物体内的葡萄糖作为含能工质,为燃料电池提供能量来源。以葡萄糖作为底物的生物燃料电池的化学反应方程为:
阳极反应:
阴极反应:
总反应: (葡萄糖酸)
由于纳米机器人在密闭环境中,都是整体浸入在体液或血液中获取葡萄糖进而反应出能量,很难做到像传统燃料电池一样,使阳极和阴极独立分开反应。因此根据生物学和化学原理,选用强选择性的酶作为阴阳极,在体液或血液中各自吸附目标对象进行反应,进而制作成单腔室结构的纳米生物燃料电池。结构如图2。
以葡萄糖催化酶和胆红素氧化酶为例,葡萄糖催化酶只能催化葡萄糖在阳极的氧化反应,不参与阴极氧化剂的还原反应;同理,胆红素氧化酶只催化氧化剂在阴极的还原反应,不参与葡萄糖在阳极的氧化反应。相对于传统催化剂而言,这种以葡萄糖催化酶和胆红素氧化酶形成的纳米生物燃料电池,放入含能工质液体中就能反应输出电能,具有反应条件温和,催化效率高,且对环境友好等优点。同时,单腔室结构简单,还有利于进一步缩小电池体积。在纳米生物燃料电池性能方面,采用最佳浓度1 wt%偏酸性的的葡萄糖溶液作为燃料,工作温度为60℃~70℃,则测得的开路电压210 mV,短路电流35 μA,最大功率为2.7 Μw [5] 。

Figure 2. Single-chamber nano-biofuel cell
图2. 单腔室结构纳米生物燃料电池
3.2. 自供能循环再生设计
由于采用葡萄糖作为含能工质,化学反应后生成CO2和H2O。为实现纳米机器人自供能循环再生,可参考植物光合作用,进行葡萄糖的可逆生成反应。植物通过根茎吸收水分,加上叶片吸收二氧化碳,在光合作用的反应下,可生成葡萄糖和氧气,通过体内枝干的通道汁液,不断循环给植物全身提供能量物质。化学方程式可表示为:
纳米生物燃料电池利用葡萄糖化学反应释放出电能,生成CO2和H2O。通过仿叶绿体的装置,利用阳光或者紫外线的光合作用又重新生成葡萄糖和氧气,可供燃料电池继续反应发电。该循环再生方法无需外界提供额外的电能、添加物等,真正实现了含能工质在密闭空间下的循环再生。纳米生物燃料电池含能工质的循环利用原理如图3所示。

Figure 3. Cyclic schematic diagram
图3. 循环原理图
4. 应用仿真
4.1. 纳米机器人受力分析
假设纳米机器人在液体中以速度v匀速向前运动,则纳米机器人会受到与运动方向相反方向的液体粘性阻力F液。同时机器人是纳米级别,不仅要考虑常规受力,还要将微观上的布朗运动考虑在内 [6] ,即也会受到与机器人运动方向相反的布朗力FBr。考虑纳米机器人体积和自身质量都很小,其所受重力和
浮力暂且不予以讨论。如图4所示。得到公式 。
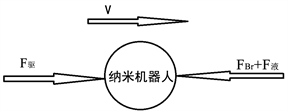
Figure 4. Stress analysis of nano-robot
图4. 纳米机器人受力分析
其中,布朗力具有不确定性,其估算方程为:
式中,ζ表示高斯分布随机变量(标准正态分布);μ表示流体粘度(Pa·s);KB表示玻尔兹曼常数(J/K);T表示热力学温度(K);R表示颗粒半径(m);Δt表示时间步长(s)。
纳米机器人在液体中运动,为简化计算,假设纳米机器人形状为球形,根据斯托克斯公式,所受的粘滞阻力为:
式中,π表示圆周率;η表示流体的粘性系数;v表示物体速度;r表示球形物体的半径。
由于相关参数为已知条件,可求得球体纳米机器人在液体中,前进速度与驱动力的相互关系。且从上述公式可看出,驱动力还会受到纳米机器人大小、环境温度的影响。
4.2. 仿真计算分析
采用纳米生物燃料电池方式进行推进。若纳米机器人工作环境为温度 的最佳工作温度,在水中运动,此时纳米燃料电池最大功率为 。在此温度下,水的粘性系数η约为0.4688 × 10−3 Pa·s,水的粘度系数μ为0.4688 × 10−3 Pa·s,时间步长 ,由于ζ ≤ 1,这里要使布朗力最大,则ζ取1,玻尔兹曼常数 。若纳米机器人工作在室温25℃ (298 K)下,工作介质依然看成是水,此时纳米燃料电池最大功率为 ,查水的粘度表可知,25℃时,水的粘度μ为0.8937 × 10−3 Pa·s,粘性系数 ,其他数值与温度为333 K时一致。若纳米燃料电池输出功率全部用于分子发动机,实际功率 ,则 ;根据有关资料,纳米燃料电池到分子发动机会有功率损失,效率 ,从分子发动机到鞭毛也会有功率损失,效率 。在不同温度和不同功率下,对纳米机器人速度进行计算,计算结果如表1。数据关系如图5所示。

Table 1. Nano robot speed table under different conditions
表1. 不同条件下纳米机器人运行速度表
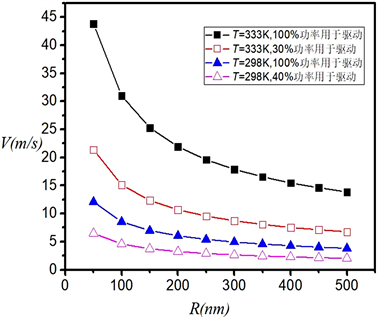
Figure 5. V-R diagrams of nanorobots under different conditions
图5. 在不同条件下,纳米机器人的V-R图
根据纳米机器人的前进动力和燃料电池功率需求的计算,燃料电池自供能动力输出完全能够满足使用条件。此外通过仿真计算和图表数据,还得到如下结论:
1) 尺寸是影响纳米机器人速度的一个重大的因素。纳米机器人的速度随着尺寸增大而减小,且在100 nm~200 nm范围内,其减小率较大,在400 nm以上时,尺寸对其速度的影响较小。
2) 温度不仅影响着纳米机器人的受力,还对纳米燃料电池的功率有着巨大影响。机器人所受的阻力来自于液体粘性力和布朗力,温度影响液体的粘性系数,温度越高,粘性系数越低,液体粘性力会减小,但是根据布朗力的公式,温度在295 K以上时,温度增加,布朗力减小。另外,温度在333 K以下时,纳米生物燃料电池的功率随温度的升高而升高。温度越高,质子传导率越高,但是酶的活性仅在一定范围内随温度升高而升高,温度过高,酶会失去活性,从而不能产电。综合以上所有信息,温度在333 K时,纳米生物燃料电池的功率最佳。另外,在295 K~333 K范围内,其所受的液体粘性力和布朗力会随着温度的升高而减小。
3) 纳米机器人的形状对纳米燃料电池功率输出也存在影响。由于上述纳米机器人按球体进行仿真计
算,根据纳维-斯托克斯公式,其液体粘性阻力计算方程为 ,可见π是影响动力的一大因素。因此,考虑将纳米机器人设计成仿真鱼的流线型状,可大大减少液体粘性阻力,从而降低燃料电池功率
,可见π是影响动力的一大因素。因此,考虑将纳米机器人设计成仿真鱼的流线型状,可大大减少液体粘性阻力,从而降低燃料电池功率
消耗,其前进速度也会大大提高。
5. 结束语
纳米机器人具有较强的研究价值,其微小的尺寸使其在医疗、军事、微电子领域具有巨大的应用场景。针对纳米机器人能源持久性问题,采用纳米生物燃料电池是一个很好的研究方向。文中对纳米生物燃料电池的功率输出可行性进行了详细的分析计算,为燃料电池应用到纳米机器人提供了理论验证。同时,还从原理上验证和构建了基于葡萄糖的可循环含能工质的纳米生物燃料电池,解决了纳米机器人在密闭条件下,动力自供能持久输出的问题。今后,在燃料电池的稳定输出、微生物光合循环及纳米机器人精确控制驱动等方面还有待进一步研究。
文章引用
杨国威,方 昆,梁前超. 密闭空间下含能工质的再生循环与纳米燃料电池的应用
Regeneration Cycle of Energy-Containing Working Quality and Application of Nano-Fuel Cell in Confined Space[J]. 纳米技术, 2019, 09(03): 86-92. https://doi.org/10.12677/NAT.2019.93010
参考文献
- 1. Wang, J., Ge, W., Hou, Y. and Lu, Q. (2015) Scanning Tunneling Microscopy Evidences for Surface Electron Scattering by Underly-ing Atoms. Carbon, 84, 74-81. https://doi.org/10.1016/j.carbon.2014.11.046
- 2. Li, Y., Qian, F., Xiang, J. and Lieber, C.M. (2006) Nanowire Electronic and Optoelectronic Devices. Materials Today, 9, 18-27. https://doi.org/10.1016/S1369-7021(06)71650-9
- 3. Patolsky, F., Timko, B.P., Zheng, G. and Lieber, C.M. (2007) Nan-owire-Based Nanoelectronic Devices in the Life Sciences. MRS Bulletin, 32, 142-149. https://doi.org/10.1557/mrs2007.47
- 4. 朱静, 等. 纳米材料和器件[M]. 北京: 清华大学出版社, 2003.
- 5. Peng, K., Xu, Y., Wu, Y., Yan, Y., Lee, S.-T. and Zhu, J. (2005) Aligned Single-Crystalline Si Nanowire Arrays for Photovoltaic Applications. Small, 1, 1062-1067. https://doi.org/10.1002/smll.200500137
- 6. Wu, Z., Gao, C., Frueh, J., Sun, J. and He, Q. (2015) Remote-Controllable Explo-sive Polymer Multilayer Tubes for Rapid Cancer Cell Killing. Macromolecular Rapid Communications, 36, 1444-1449. https://doi.org/10.1002/marc.201500207