Computer Science and Application
Vol.06 No.12(2016), Article ID:19321,6
pages
10.12677/CSA.2016.612092
Analysis on Requirement of Air-Ground Cooperative Urban Anti-Terrorism Network Based on Unmanned Aerial Vehicle
Zeyu Ding1, Weihan Liu2
1No.2 Secondary School Attached to East China Normal University, Shanghai
2School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, Shanghai

Received: Nov. 29th, 2016; accepted: Dec. 12th, 2016; published: Dec. 22nd, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
At present, the deployment of anti-terrorism network and the improvement of unmanned aerial vehicle technology are still the focus of current research. The complex terrain in urban environment and the difficulty of investigation also raised the problem of urban anti-terrorism. Based on the characteristics of the city’s anti-terrorism technology, this paper puts forward the main equipment of urban air-ground cooperative anti-terrorism network, which is composed of emergency command vehicle, rotor unmanned reconnaissance aircraft and portable information sharing terminal. The device network and LTE technology are combined to provide all-weather real- time information resources sharing.
Keywords:Unmanned Aerial Vehicle, Urban Anti-Terrorism, Air-Ground Cooperative Network

基于无人机空地协同城市反恐网络需求初探
丁泽宇1,刘伟汉2
1华东师范大学第二附属中学,上海
2上海交通大学电子信息与电气工程学院,上海

收稿日期:2016年11月29日;录用日期:2016年12月12日;发布日期:2016年12月22日

摘 要
目前城市中反恐网络部署以及无人机技术的提高仍是当下研究的重点。城市环境中地形复杂,侦查难度大,这也给城市反恐提出了难题。本篇论文基于现下城市反恐技术实现困难的特点,提出城市空地协同反恐网络的主要装备可由应急处突指挥车、旋翼无人侦察机、便携式信息共享终端组成。该设备网络与LTE技术相结合,提供全天候实时信息资源共享。
关键词 :无人机,城市反恐,空地协同网络

1. 引言
针对目前城市环境下反恐处突的现状及难点,为满足城市反恐对复杂地形的侦察、情报的获取、应急处置与反应、持续侦察、实时图像情报反馈、通信保障等实际需求,急需构建新型空地协同反恐应用系统,以弥补相关技术短板,全面提升城市环境空地协同反恐能力。近年来随着无人机技术的飞跃发展,自动化和智能化程度大大提高。除了在军事领域,无人机系统 [1] 也逐渐进入到国家基础建设和公共安全等民用领域。由于无人机具有反应快、覆盖地域广等优点,将无人机系统与公安现有网络、平台和侦察手段相结合,既可避免信息孤岛,又有助于构建空地一体化的指挥网络体系。
无人机能利用承载的高灵敏度相机进行不间断的画面拍摄,获取影像资料,并将所获得的信息和图像传送回地面。若将其广泛用于公安业务如反恐、缉毒、特殊案件侦察、车辆查控、交通巡逻、大型活动空中监控等警务活动中,可充分发挥其“查得准、盯得住、传得快”的优势,为指挥决策提供实时准确的“第一手”资料,同时更快捷高效地完成应急救援、陆上搜救、应急追踪、现场取证、高空拍摄、空中监控等急难险重任务。这无疑将成为公安机关在信息化条件下,打击犯罪、维护稳定、服务人民的杀手锏。
本文依据城市地理环境以及反恐处突的应用场景 [2] [3] ,在四个方面对城市空地协同反恐网络核心能力提升提出了要求,包括提高警用无人侦察机持续侦察和悬停凝视的能力、实时图像远程回传的能力、实现通信中继的能力、和地面警员统一指挥调度的能力。提出了一种可由应急处突指挥车、旋翼无人侦察机、便携式信息共享终端组成的城市空地协同反恐网络系统架构,并对该系统架构中的主要研究内容从三个方面进行了介绍,包括任务载荷、4G通信链路与设备以及应急处突指挥车,并对其技术需求进行了探索。
2. 能力需求
基于城市地理环境及反恐处突应用场景,梳理城市空地协同反恐网络核心能力提升需求如下。
2.1. 提高警用无人侦察机持续侦察和悬停凝视的能力
针对城市环境地形复杂,反恐作业难度大的特点,反恐作业中无人机系统需要执行长时间飞行和悬停凝视等操作。这对无人机系统 [4] 的持续工作时间提出了很高的要求,同时无人机平台也需要具备长航时的工作能力。
2.2. 提高警用无人侦察机实时图像远程回传的能力
很多情况下,街头的监控设备都会被不法分子破坏,导致后方无法了解事发现场的情况。为了满足后方的无人机指挥控制人员实时获取侦察情报、快速应急响应的需求,无人机系统需要具备将前方的侦察图像实时回传到指挥车中的能力。
2.3. 实现提高警用无人侦察机实现通信中继的能力 [5]
应急出警的通信设备若租用卫星线路,需要繁杂的申报手续,而且通信信号盲区多。反恐行动中的通信保障能力不足将会导致各节点之间通信阻断,无法开展协同作业。因此需要无人机系统具备通信中继能力,以保障各反恐力量间的协调沟通。
2.4. 提高对警用无人侦察机和地面警员统一指挥调度的能力
应急处突指挥车是整个现场的信息汇聚中心和统一调度中心,需基于现场专网完成侦察信息汇聚以及判断现场形势,并完成任务指令分发,统一指挥决策现场行动。
3. 系统组成及架构
警用无人侦察机属于专业级无人侦察机,相比完成航拍等用途的消费级无人侦察机,专业级无人侦察机应用于工程领域,在续航时间、载重量、安全可靠性等方面要求更高。目前市面上的无人侦察机使用民用无线电操控,飞行距离受限,抗干扰能力差,在此背景下,寻求技术可靠、载荷重量轻、成本低廉的通用通信技术以应用于警用无人侦察机数据链迫在眉睫。近几年随着移动通信技术的不断发展,利用公用通信网络传输大量数据成为可能,基于移动网络的无人侦察机数据链的最大优势在于可以使无人侦察机及地面警员摆脱地面站控制距离的限制,借助覆盖全国的公共通信网络跨地域工作。如今无人侦察机图像传输所用的图传设备多数采用2.4 GHZ传输技术,已经面市产品的传输范围基本都在2公里以内,这就意味着,无人侦察机难以实现影像的超视距远距离回传,通常只能采用加装存储卡的方式把航拍的视频带回地面。随着移动通信业务的快速发展,4G/LTE技术因具备较高的移动数据传输能力已经在视频直播中得到运用,在视频传输过程中LTE [6] 的下行峰值速率可以达到100 Mbps,上行可以达到50 Mbps。
基于上文分析,提出可由应急处突指挥车、旋翼无人侦察机、便携式信息共享终端组成的城市空地协同反恐网络主要装备。系统运行可基于4G网络(公网/专网),具备图像及视频数据传输能力,可实现专网/公网无缝切换,达到通信无盲区的效果。无人侦察机平台搭载高清摄像机和宽带无线机载终端模块,用于采集音视频数据,使用者可以通过机载4G终端将数据下传到应急处突指挥车。应急处突指挥车具有完成4G链路通信、任务规划、数据加密、情报处理、图像压缩、无人机控制等功能。同时,应急处突指挥车可通过车载4G模块,利用LTE公网络将无人侦察机拍摄到的音视频数据流转发到公安部门指挥中心。基于上述组成的城市空地协同反恐网络应用系统架构及实际场景示意图分别如图1,图2所示。
3.1. 应急处突指挥车
应急处突指挥车作为前置任务节点,用于完成任务规划、飞行控制、链路控制、情报处理、信息安全等一系列功能,通过LTE专网上行链路完成无人侦察机控制命令传输,同时可通过LTE公网传输现场图像到公安及其他部门管控中心,以增强场处置能力。应急处突指挥车可基于数字地图完成空中侦察及地面节点指挥调度,时刻掌握各节点的直观地理位置信息和状态信息,并能对各进行组呼,单呼以及发送专网短信等操作,时刻掌握节点部署状况并就近做出快速调遣。应急处突指挥车打破了以往指挥调度的时空局限性,可实现指挥调度移动化。

Figure 1. Air-ground cooperative urban anti-terrorism network structure
图1. 城市空地协同反恐网络架构图
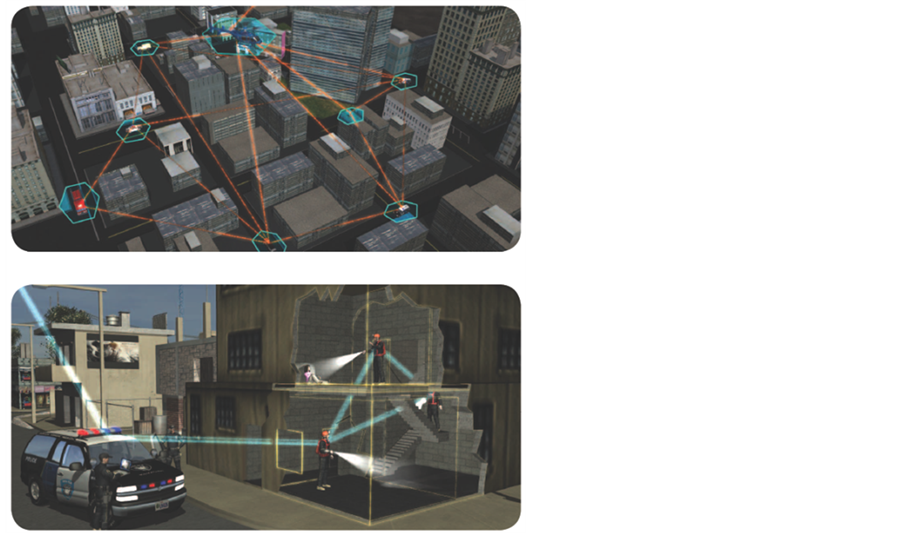
Figure 2. Air-ground cooperative urban anti-terrorism network scene
图2. 城市空地协同反恐网络现场示意图
3.2. 旋翼无人侦察机
旋翼无人侦察机具有较好的稳定性和可靠性,采用模块化载荷,能够根据任务需要挂载高清相机、红外摄像仪等功能模块,基于信息传输设备(LTE专网/公网)完成现场视频实时查看和分发,以及指控命令接收。
3.3. 便携式信息共享终端
地面警员通过便携式信息共享终端接收指挥车任务指令及无人侦察机情报信息。同时便携式信息共享终端可通过扩展北斗定位、现场图像及视频上传与分发、音视频联动、移动警务数据查询等一系列功能,提高一体化行动效能。
4. 关键技术
在城市空地协同反恐网络中,涉及到三个主要的关键技术包括图像处理技术、LTE通信与加密技术,接下来将对这三个关键技术进行简单介绍。
4.1. 图像处理技术
图像处理技术指通过计算机对图像进行处理,包括图像变换、增强、压缩编码等。在本文的网络架构中主要是无人侦察机运用图像压缩、图像增强、图像匹配、等技术对拍摄到的图像处理后方便通过通信网络进行传输。
4.2. 4G/LTE
4G/LTE [7] 技术以传统的通信技术为基础,加入了新的通信技术提高了网络效率并增加了功能,是一种超高速无线网络,体现出了通信速度快、网络频谱宽、通信灵活、智能效率高的特点。在本文的网络架构中,主要运用公网/专网进行图像及视频数据的传输,并实现专网/公网无缝切换,达到通信无盲区的效果。
4.3. 加密技术
加密技术 [8] 是一种常用的安全保密手段,将数据变为乱码后进行传输,并在接收到数据后再通过一定的手段解密出原始数剧。在本文的网络架构中,主要是对加密算法和密钥的管理进行研究,保证信息传输的安全性。
5. 技术需求
城市空地协同反恐网络的主要研究内容集中在任务载荷、4G通信链路与设备以及应急处突指挥车三个方面。整个反恐网络的技术需求分解到这三个方面可概述如下。
5.1. 任务载荷
无人侦察机通过高灵敏度摄像机等任务载荷,实现画面拍摄、目标识别、目标跟踪、图像传输等功能 [3] 。在可能的低照度环境下,需为无人侦察机研究提供一种实时视觉引导、侦察监控任务系统,其关键技术包括光学系统设计、图像压缩和加密、高速数字图传等。光学系统设计可通过采用多传感器相机实现多波段的光学探测,使其达到优于单一传感器的成像效果,经多源图像融合后实现视景增强,解决低照度下成像的技术难点。图像压缩和加密可通过高性能的FPGA实现高分辨率的图像压缩,在不降低画面质量的前提下减小码流以实现图像数据实时传输,并对图像数据进行加密处理。高速数字图传将高速图像数据实时传输给4G网络,使得地面监控设备及警员能够实时播放监控画面。
5.2. 4G通信链路与设备
无人侦察机、地面警员及应急处突指挥车可通过LTE模块进行LTE专网通信,同时可将所接收的音视频数据转化为4G信号再通过运营商4G基站,经过公用通路传输到监控中心。4G模块可以外接天线,提升接收信号灵敏度,这样在基站信号覆盖微弱的地方也能保证信号质量。需针对4G通信链路与设备特性开展复杂电磁环境下的抗干扰、动态资源分配、OFDMA高效率调制技术等增强特性的应用开发,以取得良好的应用效果。
5.3. 应急处突指挥车
在基于4G链路的车载警用无人侦察机系统中,地面应急处突指挥车技术需求主要聚焦在任务规划、情报处理和信息安全等方面。任务规划除载荷规划外的核心就是航路规划。本系统载荷使用简单,仅需要考虑在接近任务区域时打开载荷,以及在侦察任务结束后关闭载荷时的情况,可以更好的降低功耗、延长无人侦察机任务时间。无人侦察机执行城市反恐任务空间构造复杂,对侦无人察机的航路规划难点就是地面回避、障碍规避等 [7] 。威胁规避主要是根据城市地图和侦察图像,实时判断障碍物、威胁区以对无人侦察机航路进行实时调整,该技术一方面对城市地图、侦察图像处理速度、识别精度等要求较高,另一方面要求通信链路时延低,此外还需要考虑在线重规划算法的智能程度。人工控制的威胁规避可通过采用基于地形跟随、地形回避、威胁回避等技术的航迹规划方法,空间某航迹的威胁分析需综合考虑地形遮蔽、区域通视性,具体威胁值由综合威胁评估模型给出。人工控制的威胁规避的时间要求往往不能完全满足无人侦察侦察机的实时飞行要求,因此需要考虑人工智能的威胁规避方法,以无人侦察机具备智能的自动规避能力。
情报处理主要基于图像的几何修正、图像增强、图像匹配、跟踪等算法,实现目标的识别、跟踪,最终将分析结果实时输出给任务合成软件。同时,基于4G网络的城市空地协同反恐系统采用的共用和专用4G通信网络,这也对信息安全措施提出了更高的要求,以防止通信网络被截获。加密技术 [8] 是最常用的信息安全手段之一,在加密技术研究方面,重点研究内容是加密算法和密钥的管理。目前市场已有成熟的加密设备,从经济性方面来考虑选取货架商品更为适用。
6. 结束语
本文概要分析城市环境下反恐处突能力需求,并给出一种基于无人机基本城市空地协同反恐网络系统构建架构。本网络架构融合宽带LTE等技术手段,为反恐处突提供全天候、全时空的信息共享及指挥调度框架,可将以往反恐处突单一、分离的通信手段调度方式转化为面向现场统一态势的协同调度指挥,为无线信息化与公安反恐业务模式高度融合提供了解决思路。
文章引用
丁泽宇,刘伟汉. 基于无人机空地协同城市反恐网络需求初探
Analysis on Requirement of Air-Ground Cooperative Urban Anti-Terrorism Network Based on Unmanned Aerial Vehicle[J]. 计算机科学与应用, 2016, 06(12): 772-777. http://dx.doi.org/10.12677/CSA.2016.612092
参考文献 (References)
- 1. 高珍, 邓甲昊, 孙骥, 等. 微型无人机图像无线传输系统的发展现状及其关键技术[J]. 科技导报, 2007, 25(16): 68-72.
- 2. 李本先, 梅建明, 李孟军. 我国反恐情报及预警系统框架设计[J]. 中国人民公安大学学报(社会科学版), 2012, 28(4): 117-125.
- 3. 毛振军. 分析“暴恐”新特点探究防控新对策[J]. 新疆警官高等专科学校学报, 2013(3): 17-21.
- 4. 甄云卉, 路平. 无人机相关技术与发展趋势[J]. 兵工自动化, 2009, 28(1): 14-16.
- 5. 柳长安. 无人机航路规划方法研究[D]: [博士学位论文]. 西安: 西北工业大学, 2003.
- 6. 陈晓东. 4G/LTE在无人机直播4K超高清电视新闻中的应用[J]. 广播与电视技术, 2015, 42(10): 44-47.
- 7. 官微, 段红光. LTE关键技术及其发展趋势分析[J]. 电子测试, .2009(5): 5-8.
- 8. 商艳红. 数字图像加密技术的研究[D]: [硕士学位论文]. 北京: 北方工业大学, 2005.