Computer Science and Application
Vol.07 No.02(2017), Article ID:19742,7
pages
10.12677/CSA.2017.72014
Requirement Analysis of Collision Avoidance for Unmanned Aerial Vehicle in Non-Isolated Airspace
Ye Zhi1, Zeyu Ding2, Yuting Zhu3
1Shanghai Bao Tong Fan Qiu Electronics Co., Ltd., Shanghai
2No. 2 Secondary School Attached to East China Normal University, Shanghai
3School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, Shanghai

Received: Jan. 28th, 2017; accepted: Feb. 17th, 2017; published: Feb. 20th, 2017

ABSTRACT
The increasing number of unmanned aerial vehicles is urgently needed to share non-isolated airspace resources with ordinary aircrafts, which poses a potential safety hazard to already busy air traffic. UAVs have not yet reached the same level of safety as manned aircraft in terms of regulations, communications, surveillance, reliability and perceptual collision avoidance, making UAVs effectively integrated into non-segregated airspace and becoming an urgent problem to be addressed by national air traffic control organizations. Based on the principles of unmanned aerial vehicles collision avoidance and the types of non-isolated airspace, this paper takes the airspace threat target attribute into consideration, and establishes the anti-collision requirement standard for unmanned aerial vehicles and provides basis for the development of unmanned aerial vehicle collision avoidance system and relevant air traffic control standards.
Keywords:Non-Isolation, Unmanned Aerial Vehicle, Collision Avoidance, Requirement
非隔离空域无人机防撞需求初探
支叶1,丁泽宇2,朱雨婷3
1上海宝通汎球电子有限公司,上海
2华东师范大学第二附属中学,上海
3上海交通大学电子信息与电气工程学院,上海
收稿日期:2017年1月28日;录用日期:2017年2月17日;发布日期:2017年2月20日

摘 要
数量剧增的无人机迫切需要与普通航空器共享非隔离空域资源,给本已十分繁忙的空中交通带来了安全隐患。由于在法规、通信、监视、可靠性和感知防撞方面,无人机尚未达到与有人机同样的安全水平,使无人机系统被有效整合进非隔离空域,成为各国航管组织亟待解决的重要问题。基于无人机防撞原理及非隔离空域类型,充分考虑空域威胁目标属性,制定无人机防撞需求标准,为无人机防撞系统的研制及相关空管标准规范的制定提供依据。
关键词 :非隔离,无人机,防撞,需求

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着无人机技术的快速发展,其使用范围已经从军事领域拓展到公安、交通、农业、地质等多个行业,其飞行高度能力覆盖了近地面的几十米到几万米高空 [1] 。
为了将无人机系统整合进现有的空管规则,无人机的防撞能力需要建立在与有人飞机对等和透明的基础上,并融入到现有的飞行防撞框架下 [2] 。目前针对非隔离空域下无人机防撞问题的研究主要集中在六个方面:无人机对入侵飞机的探测能力、无人机对有威胁的入侵机执行防撞机动的能力、装备机载防撞系统(ACAS)的有人飞机对入侵无人机的探测能力、无人机与装备ACAS的有人机之间的互操作性、无人机感知防撞能力的评估标准、无人机自动驾驶模式与远程人在回路遥控驾驶模式中防撞性能的差异。
无人机防撞技术的研究是提高无人机自主性和安全性的关键技术之一。目前国内外对无人机防撞技术的研究比较广泛。对于实现无人机防撞决策,已实现了多种方法,比如基于马尔科夫决策过程的原理、基于最优控制理论、结合姿态角变化的优化多约束变性规划模型的方法以及基于概念圆的概念建立相关模型与算法框架等。
本文首先介绍了目前无人机防撞的研究背景以及目前国内外已有的研究成果,并结合现状引出本文主要研究的课题:针对非隔离空域下的无人机防撞需求的探究。
文章第二节阐述了无人机防撞的概念及原则,提出了无人机防撞的模型和防撞需要遵循的原则。
文章第三节主要针对非隔离空域的环境下对非隔离空域所遭遇的目标进行分类介绍,其中包括遭遇目标属性、空中目标分类、无人机空中防撞标准。
文章第四节结合本文前几节的介绍,将无人机防撞需求进行了分类,并将无人机进入非隔离空域对可能遭遇的不同种类威胁目标的防撞需求分为五类,本节对这五类的具体防撞需求、要求进行了详细的阐述。
最后对整篇文章的内容进行了总结与感悟。本文设计无人机防撞原则,并不设定某一单独的系统为所有的无人机提供防撞功能,针对非隔离空域下无人机的不同类型及空域需求,结合飞行准入标准和空管运行规范,提出无人机系统防撞功能性能需求。
2. 无人机防撞及原则
无人机在非空隔离空域飞行过程中需要防撞原则以协调各飞机的飞行模式,确保无人机飞行的安全,不影响其他军民航飞机的正常飞行。本文设计了无人机遭遇防撞模型,包括他机跟踪、冲突探测和冲突解决。
2.1. 无人机防撞模型
两架飞机遭遇过程中的防撞模型如图1所述,该模型将防撞过程概括为他机跟踪、冲突探测和冲突解决三个步骤。当两架飞机存在协调能力时,可以通过协商来进一步提高防撞可靠性。在系统层面,基于冲突管理模型的无人机的防撞能力需要包含空中交通管理和无人机感知防撞两大要素,它们均涉及到人员、设备、标准规范等内容。在功能层面,无人机防撞包含了冲突管理、间隔设定、防撞机动等要素 [3] 。
当无人机自主飞行时,具备自主防撞的无人机能够对它一定视角范围内的领域进行障碍物判断,即障碍物冲突检测,理想状态下,无人机对所探测到的障碍物进行判断,并根据其特征进行分类,本文下节将对所遭遇目标进行详细的分类,根据遭遇障碍物的特征与特点,做出最优化的躲避障碍物的决策,实现了无人机的防撞,原理图如下图2所示。
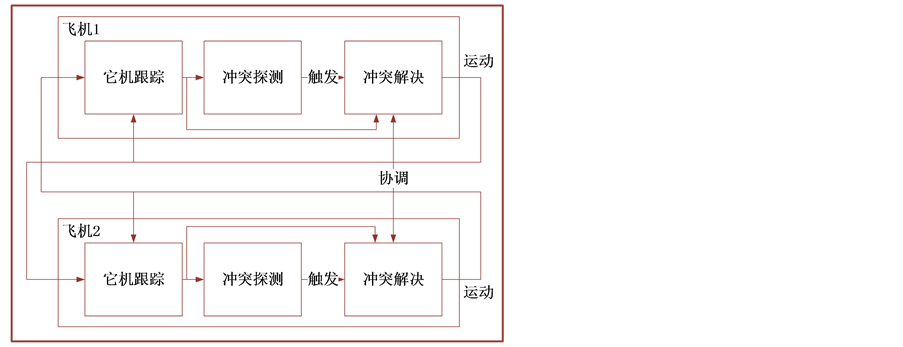
Figure 1. Collision avoidance pattern of two airplanes
图1. 两架飞机遭遇防撞模型

Figure 2. The principle of autonomous collision avoidance
图2. 自主防撞系统原理
2.2. 防撞遵循原则
无人机防撞机动的时机与特性遵循所规定的宗旨能有效增加防撞性能,包括无人机防撞的安全性宗旨和可行性宗旨,最大限度的增加防撞性能。
安全性宗旨指无人机防撞能力的目的在于降低冲突危险性。需要允许无人机有足够时间进行潜在冲突探测、冲突避免规划和防撞机动执行,同时能够兼容小机身尺寸的无人机。安全性宗旨要求无人机防撞需要同时考虑其自动驾驶与飞行员远程操作的情况,适应无人机自动响应和远程飞行员进行相应的告警时间。可行性宗旨要求能够最小化因防撞机动引起的航路偏离造成后期对其它飞机和空中交通管理一系列影响,同时尽可能最小化繁琐的虚假告警。
为了满足安全性宗旨和可行性宗旨,无人机防撞需要遵循以下原则:
1) 无人机防撞初期采用相对温和的控制动作,在后期以保证在容忍程度内有效防撞为宗旨但要尽量减少不必要的机动。
2) 若无人机系统不是全自动驾驶,防撞控制动作应该允许飞行员可变化的操作。
3) 无人机防撞机动在冲突解决过程中可以随冲突情况更改。
3. 非隔离空域遭遇目标分类
无人机防撞需求的制定首先需要定义无人机系统可能遭遇的目标类型。不同目标类型具备不同尺寸、质量、速度和飞行高度范围等属性,无人机可针对自身类型及飞行条件和高度范围来应对可能遭遇的空域目标产生的冲突风险。无人机可能遭遇的所有飞行目标属性包括物理属性、防撞能力、空域、气象条件、机载能力。
3.1. 遭遇目标属性
无人机的物理属性包括入侵遭遇目标的外观尺寸、质量与速度、雷达有效截面等。无人机需要根据威胁尺寸大小预判威胁飞行物的类型;质量与速度决定了发生碰撞时产生的动能,从而影响冲突探测的最优时间;目标的雷达有效截面决定了其被探测到的难易程度。
防撞能力不是所有类型的空域目标都具备采取防撞机动的能力,在国际民航组织空域规则下,某些类型飞机具有优先权。与此同时,在包括空域、气象条件、机载设备等诸多外部环境的影响下,也使得入侵遭遇目标属性产生一定的差异。
空域。无人机所在的空域不同会对无人机防撞能力产生不同需求。空域代表了无人机在飞行过程中可能遭遇的空中目标类型。若某空域中所有飞机均能够被空中交通管理所知悉,则该空域为已知空域,否则为未知空域。无人机装备二次雷达等空管装备能够在有效地探测到已知空域中超出视距的碰撞威胁。
气象条件。在所有飞行阶段中,气象条件可以分类为视距气象条件和仪表气象条件。当可见气象条件无法维持时,飞行进入仪表气象条件。许多小型飞机仅允许进行视距飞行从而限制其进入A类空域。
机载设备。指飞机可以搭载的防撞设备包括无线电、二次雷达、ACAS等,飞机载荷能力不同也使得机载设备存在差异,性能参差不齐,防撞能力也受到影响。
3.2. 空中目标分类
根据遭遇目标分类属性,对无人机飞行中空中遭遇目标类型进行分类,便于对无人机对该入侵类型的防撞能力需求研究。
第一种类型为只能被光学方式探测的非空中交通管制协调对象,不具备防撞机动能力。包括鸟类、风筝和气球、热气球、降落伞和一些无动力空中交通工具。
第二种类型为只能被光学方式探测的非空中交通管制对象,具备防撞机动能力。包括模型飞机、滑翔机等。
第三种类型为可以被非光学方式探测的空中交通管制对象,但不具备防撞机动能力,如飞艇等。
第四种类型可以被非光学方式探测的空中交通管制对象,在交通管制的介入下可以在各种气象条件中发起防撞机动。包括直升机、军用战斗机、商用运输机和无人机 [4] 。
第五种类型可以被非光学方式探测的空中交通管制对象,不需要空中交通管制的介入也能够在各种气象条件中发起防撞机动。包括装备ACAS的飞机、装备相关机载设备的战斗机和无人机。
3.3. 无人机防撞需求标准
不同空域目标各自的属性将对无人机防撞能力需求将产生直接影响。本文根据目标属性总结主要影响无人机防撞能力需求的三个标准。
1) 与ATC交互标准。目标可以分为空中交通管制协调对象与非空中交通管制协调对象。
2) 可探测性标准。对目标的探测可以只利用光学技和非光学技术进行。光学探测技术基于可见光或近可见光谱电子雷达,包括视频成像探测、激光测距探测和终端成像技术等。当进入仪表气象条件光学探测技术通常会失效,此时需要利用主雷达、二次雷达、ADS-B等非光学探测技术。
3) 防撞机动能力标准。防撞机动能力是指当无人机探测到碰撞威胁时,目标可能具备采取防撞措施的能力,有可能不具备防撞机动能力。
4. 无人机防撞能力需求
无人机进入非隔离空域对可能遭遇的不同种类威胁目标的防撞需求分为五类。根据目标的可探测性能与防撞机动能力,无人机冲突探测能力及防撞需求如下所述 [5] 。
4.1. 防撞需求1
防撞需求1所包含的空中目标运动速度较慢,在冲突场景中不会从后方接近无人机系统。对这些目标的防撞需求要求使用光学探测手段并导出如下防撞策略,光学探测需求要考虑到很多方面:与视觉相当的灵敏度、前方水平扇区探测覆盖、与有人机相当的垂直方向探测覆盖、与视觉相当的慢速运动物体感知能力、可靠性等级要等于或超越有人飞机对慢速物体的探测可靠性 [6] [7] [8] 。
对其防撞能力需求是要求减小与低速运动目标发生碰撞冲突概率,且性能不低于有人机使用视距防撞的探测性能。
4.2. 防撞需求2
防撞需求2这些目标运动速度比防撞需求1要快,在冲突场景中,如果其最大速度大于无人机最低速度,该目标有可能从后方赶超无人机。对这些目标的防撞需求要求使用光学探测手段并导出如下防撞策略,光学探测需求包括:与视觉相当的灵敏度、充分考虑无人机最低飞行速度的水平探测区域覆盖、有人机相当的垂直方向探测覆盖、视觉相当的快速物体感知能力、可靠性等级要等于或超越有人飞机的探测可靠性。
对其防撞能力需求是减小与高速运动目标发生碰撞冲突概率,且性能不低于有人机使用视距防撞的探测性能。
4.3. 防撞需求3
对这类目标的防撞需求可以使用非光学探测手段并导出如下防撞策略,非光学探测需求包括:监视并跟踪二次雷达应答信号、具备根据可能的最大接近速率匹配的探测距离,并能够计算并执行有效的防撞机动、可靠性等级要等于或超越有人机装备ACAS的探测性能。
对其防撞能力需求对于ACAS防撞性能相当的无人机,要求减小与装备二次雷达飞机碰撞冲突概率,性能不低于正确响应ACAS决策告警的防撞性能。其他无人机则要求减小与高速运动目标发生碰撞冲突概率,性能不低于有人机使用视距防撞的探测性能。
4.4. 防撞需求4
对这类目标的防撞需求可以使用非光学探测手段并导出如下防撞策略,非光学探测需求包括:监视并跟踪二次雷达应答信号(必要时激活询问)、具备根据可能的最大接近速率匹配的探测距离,并能够计算并执行有效的防撞机动、可靠性等级要等于或超越有人机装备ACAS的探测性能。
其防撞能力需求对于与ACAS防撞性能相当的无人机,要求减小与装备二次雷达飞机的碰撞冲突概率,性能不低于正确响应ACAS决策告警的防撞性能。其他无人机则要求减小与高速运动目标发生碰撞冲突概率,性能不低于有人机使用视距防撞的探测性能。
4.5. 防撞需求5
非光学探测需求包括:监视并跟踪二次雷达应答信号(必要时激活询问)、具备根据可能的最大接近速率匹配的探测距离,并能够计算并执行有效的防撞机动、与ACAS飞机和具备无人机防撞功能的飞机相兼容、可靠性等级(即时探测到威胁的正确概率)要等于或超越有人机装备ACAS的探测性能。
其防撞能力需求对于与ACAS防撞性能相当的无人机要求减小与装备二次雷达飞机的碰撞冲突概率,性能不低于正确响应ACAS决策告警的防撞性能。对于其他无人机则要求减小与高速运动目标发生碰撞冲突概率,性能不低于有人机使用视距防撞的探测性能。
4.6. 不同空域无人机防撞需求
某一特定型号无人机系统将在特定空域飞行,在该空域中可能遭遇多种类型的入侵目标从而对无人机防撞能力提出多重需求。根据空域管理体制,非隔离空域可根据两类交通环境(已知空域和未知空域)和两类气象条件(视距气象条件和仪表气象条件)划分为四类空域。
在不同类型空域下无人机可能遭遇的目标分类如表1所示。

Table 1. UAV encounter objects in different airspace
表1. 不同空域无人机遭遇目标类型
表中不可能遭遇的空中目标类型用“×”表示,有可能遭遇的类型用“√”表示,在仪器气象条件低于FL100的栏目中用“√*”表示在500英尺以下该类型为唯一可能遭遇的目标类型。
所以在视距气象条件下低于FL100时,无论目标是否能与空中交通管制交互,都需对该目标具备防撞能力;在仪器气象条件下低于FL100时,需要对近地目标及具备与空中交通管制交互能力的目标具备防撞能力;在高于FL100时,需要对具备与空中交通管制交互能力的目标具备防撞能力。
5. 结论
随着无人机民用化的不断增长,无人机在非隔离空域与有人机一起飞行成为可能,在该空域下所有飞机的防撞能力都建立在对等与透明的基础上。无人机要融入现有空管规则,必须有效控制其与其它飞机之间的碰撞风险,对空中交通管制而言,无人机的表现需要如同有人飞机一样,这也正是本文对无人机防撞需求进行探索的出发点。在非隔离空域中,无人机与有人机都在行驶,要想做好无人机的防撞解决方案,前提就要充分了解会出现碰撞的所有情况,然后针对可能出现的所有情况进行实际情况的分析,这也是本文重点进行分析探究的地方,也是本文所提出的具有创新性的地方。本文根据无人机进入非隔离空域可能遭遇的不同种类威胁目标为分类依据,将实际情况做出了分类讨论,对于每种情况进行了可能出现碰撞的场景模拟分析、出现碰撞的原因、防撞的需求分析等,并且对可能遭遇多种类型的碰撞做分类讨论,最后总结出面对非隔离空域无人机防撞功能的需求总结。
本文对于非隔离空域下的无人机防撞需求进行了较为详尽的讨论,为后续每一种需求的决策方案的算法研究奠定了一定程度上的理论基础。目前已有基于信息融合的决策算法、最有逃避机动的算法研究等,无人机与有人机仍存在着较大差距,今后的研究方向应拓展到面向多种情况自主智能化选择最优化处理决策方案的无人机防撞机制。
文章引用
支 叶,丁泽宇,朱雨婷. 非隔离空域无人机防撞需求初探
Requirement Analysis of Collision Avoidance for Unmanned Aerial Vehicle in Non-Isolated Airspace[J]. 计算机科学与应用, 2017, 07(02): 117-123. http://dx.doi.org/10.12677/CSA.2017.72014
参考文献 (References)
- 1. 许云红, 周锐, 夏洁, 陈哨东. 无人机自动防撞冲突检测与优化控制方法[J]. 电光与控制, 2014(1): 1-6.
- 2. 刘慧颖, 白存儒, 杨广珺. 无人机自主防撞关键技术与应用分析[J]. 航空工程进展, 2014(2): 141-147.
- 3. 李洋. 自主防撞无人机传感器的信息融合算法研究[D]: [硕士学位论文]. 沈阳航空航天大学, 2014.
- 4. 郭兴. 诺•格公司研制无人机防撞技术[N]. 中国航空报, 2004-08-24003.
- 5. Conde, R., Alejo, D., Cobano, J.A., et al. (2012) Conflict Detection and Resolution Method for Cooperating Unmanned Aerial Vehicles. Journal of Intelligent & Robotic Systems, 65, 495-505.
- 6. 李霞, 张际海, 谢文俊, 等. 无人机自主防碰撞方法研究[J]. 飞行力学, 2011, 29(6): 48-51.
- 7. 彭良福, 林云松. 空中自动防撞系统最优逃避机动的确定[J]. 控制理论与应用, 2010, 27(11): 1575-1579.
- 8. 周航, 戴苏榕. 无人机低空域安全飞行管理概述[J]. 航空电子技术, 2015(2): 21-25, 35.