Hans Journal of Wireless Communications
Vol.06 No.02(2016), Article ID:17338,7
pages
10.12677/HJWC.2016.62006
Application of GPS RTK Positioning Technology in the Driving Test System
Yuehong Xie, Dingjiang Yao
Xi’an Huazhong Electronic Technology Co., Ltd., Xi’an Shannxi

Received: Mar. 22nd, 2016; accepted: Apr. 9th, 2016; published: Apr. 12th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Global positioning system (GPS) has been widely used in precision engineering measurement because of its high precision three dimensional positioning velocity test and timing function. Using the characteristics of high precision GPS real-time kinematic (RTK) positioning technology in the motor vehicle driving skills test can accurately calculate the contour points of the test vehicle, this solves the problem of distance measurement in the course of test vehicle. Based on RTK Technology in the test vehicle mounted dual GPS antenna and the detection method of the distance between the test vehicle and the line in the examination of specific project, and combined with the examination of electronic map the feature points and the purposes of evaluation rules, Huazhong design the automatic intelligence of the driving test system , which can realize accurate judgment.
Keywords:GPS Positioning, Driving Test System, Real Time Kinematic (RTK), Vehicle Judge System, HZ9050-GPS

GPS RTK定位技术在驾考系统中的应用
谢月红,姚定江
西安华众电子科技股份有限公司,陕西 西安

收稿日期:2016年3月22日;录用日期:2016年4月9日;发布日期:2016年4月12日

摘 要
全球定位系统(GPS)因其高精度三维定位测速及定时的功能在精密工程测量中得到迅速广泛的应用。利用高精度GPS载波相位实时动态差分(RTK)定位技术的特点,在机动车驾驶技能考试中,可精确地计算考车的轮廓位置点,解决了考车行驶过程中的距离测量问题。根据RTK技术在考车上架设的双GPS天线和具体考试项目里车线之间距离的检测方法,并结合考场电子地图各项目的特征点和各项目的评判规则,华众设计的全自动智能驾考系统,可实现精确评判。
关键词 :GPS定位,驾考系统,载波相位差分,车载评判系统,HZ9050-GPS

1. 引言
我国驾考系统行业的发展与汽车产业发展、道路交通安全管理工作发展密切相关 [1] 。随着近年来汽车保有量的提高和社会对道路安全重视程度的提高,驾考系统行业也在快速发展中。
由于科学技术的快速进步,驾考的评判方法也不断在发展和进步当中。传统的科目二和科目三考试方法是由现场的考官依靠人眼或感觉来判断考车边缘是否触碰设置在考试场地内的地面标志或边界标杆等标志物,进而人为判定考试结果 [2] 。然而,这种传统的考试方式随着考生数量的日益增长以及考试标准的不断修订早已不能够满足需求。后来研究的红外探测设备应用于驾考系统的评判中 [3] ,但这种设备属于被动接触,其主要功能的实现需要通过车辆的违规触碰来得到,并且没法完成考车行驶轨迹的记录,不能提供考车事后行驶轨迹的查询。采用这种设备进行长期的室外作业受到的干扰比较多,而且对于考核区域前期的施工以及后期使用维护的工作量较大,在驾考评判中也存在许多不公行为。
因此,这就需要更为方便和精确的测定方法改进以上的不足,使得驾考系统的建设和使用能够更科学便利。为了消除和杜绝上述所述因为人为因素在驾考评判中带来的影响,根据公安部发布修订后的《机动车驾驶证申领和使用规定》(部第139号令) [4] 和《机动车驾驶人内容和方法》(GA/T 1026-2012) [5] ,西安华众电子科技股份有限公司利用高精度GPS (Global Positioning System) [6] 载波相位动态差分(RTK) [7] 定位技术设计的HZ9050-GPS联网型机动车驾驶人场地驾驶技能(科目二)考试系统和HZ9050-KM3联网型机动车驾驶人实际道路驾驶技能(科目三)考试系统 [8] ,能够实现考试过程的自动化和智能化,从而减少误判率,体现公平、公正的原则。
2. GPS定位技术
近年来,随着卫星导航定位系统的不断发展和完善,其应用领域也进一步开拓,人们对利用卫星导航差分技术来改善定位性能变得越来越重视。
GPS定位的实质是:GPS卫星发射测距信号和导航电文,导航电文中含有卫星的位置信息,由GPS接收机在某一时刻,同时接收四颗以上的GPS卫星信号,测量出GPS接收机到GPS卫星的距离,根据空间距离后方交会的方法求测站点的位置 [9] [10] 。观测方程为:
 (1)
(1)
式(1)中: 为卫星的坐标;
为卫星的坐标; 为测站的坐标;
为测站的坐标; 为接收机钟差;
为接收机钟差; 为伪距;
为伪距; 为电离层改正项;
为电离层改正项; 为对流层改正;
为对流层改正; 为卫星钟差。由于接收机钟差
为卫星钟差。由于接收机钟差 未知,则观测方程中含有四个未知数,需一并求解。通过解算方程式则可得到测站点的三维坐标位置。
未知,则观测方程中含有四个未知数,需一并求解。通过解算方程式则可得到测站点的三维坐标位置。
2.1. GPS载波相位差分(RTK)定位原理
载波相位差分(RTK)定位技术其基本思想是:将一台GPS接收机安置在基准站上,对卫星进行连续观测,然后通过无线电传输设备实时地将基准站观测数据以及基准站已知的精密坐标信息传送给移动站;移动站一方面通过接收机接收GPS卫星信号,同时,另一方面还通过无线电接收设备接收来自基准站的观测数据,最后,根据相对定位原理解算两站间的基线,实时地处理数据,并能实时地提供厘米级精度的移动站三维坐标。GPS RTK定位系统数据流程如图1所示,这里转换参数是指利用最小二乘法,选三个已知点且分别有WGS-84地心坐标、国家坐标(或工程坐标)通过计算求解得到的。坐标转换参数直接关系到测量结果的准确性,因此,必须准确输入测区的坐标转换参数。移动站参数是用户用于功能性测量输入的数据。
也就是说,RTK技术是全球卫星导航定位技术与数据通讯技术相互结合的载波相位实时动态差分定位技术,它能够实时地给出测站点在指定坐标系统中的三维定位结果。
RTK可使定位精度达到厘米级或毫米级,该方法大量应用于移动物体需要高精度位置的领域 [3] 。如此高精度的定位技术恰好满足现今驾考科目要求精确定位内容的需求,因此被应用于驾考系统中 [11] 。在驾考系统中,需要通过三维坐标转换将解算得到的WGS-84坐标系下的值换算到所采用的坐标系中,这里的坐标转换是采用高程拟合的方法得到的 [12] 。GPS得到的是在WGS-84坐标系下的大地高高程,然而,一般所用的高程数据是正常高高程,这两者之间存在高程异常,因此可以通过拟合的方式进行高程

Figure 1. Data process of GPS RTK positioning system
图1. GPS RTK定位系统数据流程
异常的结算,从而用大地高取代正常高进行使用。用户指的是运行中的考车,即得到的是考车在相应坐标系的三维位置。
2.2. 载波相位测量的观测量
作载波相位测量时,载波相位实际观测方法是:在信号接收时刻,GPS信号接收机既要接收和解释GPS卫星发送的载波信号,又要模拟或者复制一个与卫星端卫星载波信号相位相同的载波信号,前者称为被测载波信号,后者称为基准载波信号。载波相位测量值的观测量就是基准载波相位与被测载波相位之差。
设 为接收机在时刻
为接收机在时刻 的基准载波相位,
的基准载波相位, 为
为 时刻j号卫星的被测载波相位,则载波相位观测量为
时刻j号卫星的被测载波相位,则载波相位观测量为
 (2)
(2)
式(2)中: 是整波长的相位尾数,可由接收机测得;N为整周未知数,不能直接由接收机测得,可采用三差法进行确定 [13] 。所谓三差法是在接收机、卫星和历元之间求三次差,这里不对算法做过多介绍。
是整波长的相位尾数,可由接收机测得;N为整周未知数,不能直接由接收机测得,可采用三差法进行确定 [13] 。所谓三差法是在接收机、卫星和历元之间求三次差,这里不对算法做过多介绍。
载波相位观测距离,即卫星至接收机间的伪距为
 (3)
(3)
式(3)中: 为光速;
为光速; 为载波频率;
为载波频率; 为载波波长。这里的载波是L1、L2载波或它们的某种线性组合,其中L1载波的频率和波长为
为载波波长。这里的载波是L1、L2载波或它们的某种线性组合,其中L1载波的频率和波长为 和
和 ;L2载波的频率和波长是
;L2载波的频率和波长是 和
和 ,然后利用解算的载波相位伪距代入式(1)可测定出观测站的位置坐标。载波相位观测因其波长比C/A码波长(C/A = 293 m)短得多,所以GPS测量采用载波相位观测值具有比伪距(C/A码或P码)精度高得多的优点,一般可以达到一个波长的1/100以上,即零点几个毫米,这将能够应用在需要精密测量的地方。
,然后利用解算的载波相位伪距代入式(1)可测定出观测站的位置坐标。载波相位观测因其波长比C/A码波长(C/A = 293 m)短得多,所以GPS测量采用载波相位观测值具有比伪距(C/A码或P码)精度高得多的优点,一般可以达到一个波长的1/100以上,即零点几个毫米,这将能够应用在需要精密测量的地方。
3. RTK技术在驾考系统中的应用
华众机动车驾驶人考试系统包含HZ9050-GPS型场考系统和HZ9050-KM3型路考系统。两种系统其考车的定位原理是相同的,都是采用RTK定位技术来确定考车的状态。
3.1. 基于RTK的双天线定位
GPS动态定位测量是利用GPS信号测定相对于地球运动的用户天线的状态参数,这些状态参数包括三维坐标、三维速度和时间共七个参数。
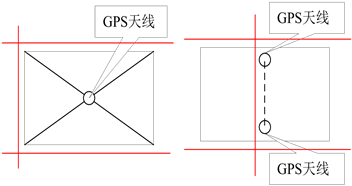
在实际应用中,基站和车载移动站上的GPS接收机同时接收来自卫星的信号 [14] ,用于差分定位考车的位置和方向。得到的考车高精度位置信息是考车GPS天线的位置,考车可采用一个立方体来近似模拟,并将其投影到平面作为长方形来处理 [15] 。GPS天线安装如图2(a)所示,在对位置信息进行定位评判时,有两种实现方式。第一种是在考试路段的电子地图上设置GPS天线所在位置的评判边界线,如图2(b)所示,如果车载GPS移动站输出的位置越界即判该考试项目为不合格;第二种是通过GPS天线安装的具体位置及距前后左右的距离,可以反算考车边缘或轮胎的精确位置,在考试路段电子地图上设置考车边界或轮胎位置的评判边界线用于考试项目的评判,考车边缘位置越界即判该考试项目为不合格,如图2(c)所示。
然而,采用第二种评判方法,为了得到考车在任意时刻更精确的位置和方向,需使用双GPS天线定
 (a) GPS天线安装示意图 (b) 评判方案1
(a) GPS天线安装示意图 (b) 评判方案1
 (c) 评判方案2 (d) 双GPS定位方案
(c) 评判方案2 (d) 双GPS定位方案
Figure 2. GPS vehicle antenna installation and evaluation scheme (the red line for the evaluation of the boundary line)
图2. GPS天线车辆安装和评判方案(红线为评判边界线)
位,如图2(d)所示,利用双GPS天线获得考车的实时坐标确定车辆的准确方位。
HZ9050-GPS800双天线定位定向GPS接收机是西安华众电子科技股份有限公司专为高精度定位定向驾考系统而设计,该接收机拥有基于220信道的Maxwell 6芯片的定位天线和矢量天线,可以实现在恶劣环境和高动态情况下的高精度快速定位和定向 [16] 。一般情况下,GPS接收机的两个天线在安装好后,其相对位置基本不发生改变,因此,两天线在载体坐标系中的相对坐标位置是确定的。两个GPS天线组成一条基线,可以确定考车的三维姿态角,两天线延考车的主轴方向配置,通过融合算法,可以确定出考车的偏航向角、横滚角和俯仰角等姿态信息。
3.2. 基于RTK的考车评判
考场电子地图的精确测绘非常重要,它是评判的标杆。根据科目内容各项目的实际安排,利用RTK技术按要求对相对固定的场地进行精确测绘,将整个考试区域进行数字化处理,由场地测绘结果数据生成虚拟传感器文件 [17] ,以代替传统物理传感器来判断考车的具体位置坐标,并将每个路段所属的基本考试项目准确的在地图上标识出来。华众设计的驾考系统中的车载评判系统是基于RTK技术 [18] ,实时获取考车运行中的准确位置和考车状态传感器数据,通过无线数据传输测得的考车坐标,结合考场电子地图与虚拟传感器进行对比,快速、准确进行各项目的检测并实时输出各项目的评判结果,实现考车在驾考中的实时评判。该系统使考场摆脱了对大量模拟传感器设备的依赖,简化了系统硬件设施的同时提高了稳定性和可靠性,并且精度可以达到±1 cm,为精确评判提供保证。
这里以科二中的“坡道定点停车”考试项目为例,其它考试项目采用相类似的方法进行检测评判。如图3所示,为检测“坡道定点停车”项目考试软件流程。当驾驶员驾驶考车进行坡道定点停车项目时,需检测的内容是车载GPS客户端自动识别进入项目,进入相应的区域则表示本项目的开始或者结束。在程序的控制下,根据考试进程判断,评判标准是1) 考车停止后,考车的前端距桩杆线的距离前后不得超出50 cm,否则按评判标准进行扣分或判为不合格;2) 考车停止后,车身距离路边缘线不得超出30 cm,否则按评判标准进行扣分或判为不合格。
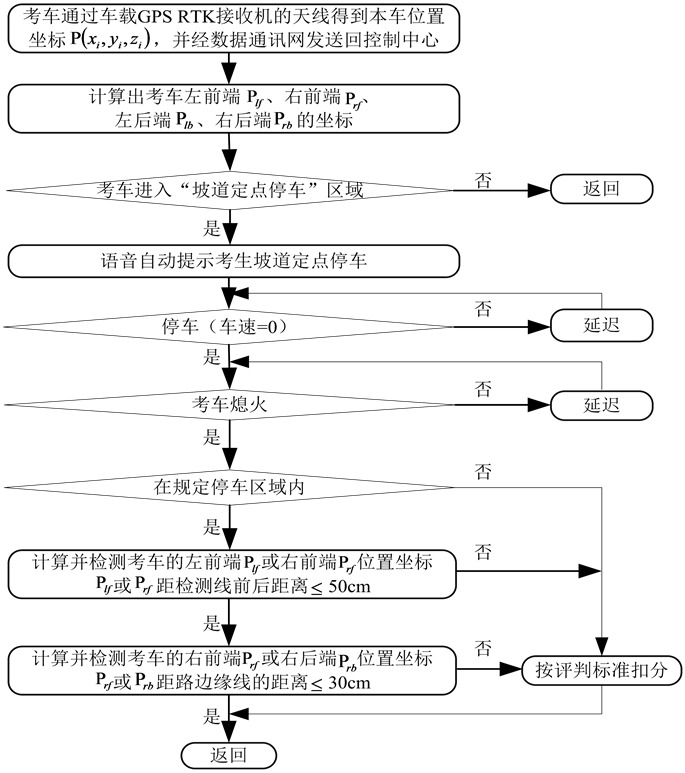
Figure 3. The software process of exam project to test “designated parking ramp”
图3. 检测“坡道定点停车”考试项目软件流程
车载评判软件是以车载GPS RTK接收机的天线得到的本车实时位置坐标 为基础的,然后,由考车端点到接收机天线的距离是确定的,经过计算求得考车左前端
为基础的,然后,由考车端点到接收机天线的距离是确定的,经过计算求得考车左前端 、右前端
、右前端 、左后端
、左后端 和右后端
和右后端 的坐标,当考车进入坡道定点停车区域后,按照评判标准进行检测。
的坐标,当考车进入坡道定点停车区域后,按照评判标准进行检测。
在检测考车与桩杆线之间的距离时,实际上检测的是考车左前端和右前端距桩杆线的距离,取其大者作为考车与桩杆线的距离。同样,检测考车与路边缘线之间的距离时,检测的是考车右前端和右后端距路边缘线的距离,取其大者作为评判距离。
华众的车载评判系统可直接输出各项目的判定结果,如考车是否压线、车身是否出线、考车是否溜车或中途停车等信息,非常适用于机动车驾驶人科目二、科目三或培训。
4. 结语
GPS RTK定位技术为驾驶人在驾考中对高精度、实时测量考车位置提供了较好的解决方案,在公安部139号令规定的机动车驾驶人考试检测项目中,利用GPS RTK定位技术可实现多数项目的自动检测,这极大的提高了整个驾考系统的自动化考试程度,并且能够保证驾考提出的高检测精度和实时性的要求。华众研究的驾考系统采用高精度实时定位技术和GPS设备,可准确进行压线判断,确定各考试项目是否合格,减少驾考过程中因人为因素对考试结果造成的影响,提高了驾考评判的准确性和客观性,体现出驾考过程的公正和公平。
文章引用
谢月红,姚定江. GPS RTK定位技术在驾考系统中的应用
Application of GPS RTK Positioning Technology in the Driving Test System[J]. 无线通信, 2016, 06(02): 39-45. http://dx.doi.org/10.12677/HJWC.2016.62006
参考文献 (References)
- 1. 赵晓林. 智能驾驶培训和考试服务系统[J]. 地理信息世界, 2014, 21(1): 91-96.
- 2. 武军. 智能化驾驶员场考系统研究与设计[D]. 西安: 西安科技大学, 2010.
- 3. 王文松, 蓝常源, 陈涛. 基于北斗系统驾校考试终端设计研究[J]. 卫星与网络, 2013(5): 68-71.
- 4. 中华人民共和国公安部.公安部关于修改《机动车驾驶证申领和使用规定》的决定[EB/OL]. 2016-03-21. http://baike.so.com/doc/5414487-5652629.html
- 5. GA1026-2012. 机动车驾驶人考试内容和方法[S]. 2013.
- 6. 徐绍铨. GPS测量原理及应用[M]. 武汉: 武汉大学出版社, 2008.
- 7. 王帅, 高井祥. 浅谈RTK技术[J]. 勘察科学技术, 2011(3): 23-25.
- 8. 谢月红, 姚定江. 基于高精度GPS定位技术的驾考系统[J]. 计算机科学与应用, 2016, 6(3): 103-109.
- 9. 何希纯, 李彦鹏. GPS在工程测量中的应用[J]. 中外企业家, 2015(30): 103.
- 10. 焦海松, 李锋, 张松, 李颖. 单基站差分GPS定位精度的分析与检验[J]. 全球定位系统, 2009(1): 5-9.
- 11. 迟家升. 基于北斗高精度定位的驾考系统[J]. 卫星应用, 2013(6): 15-18.
- 12. 奉光泽. GPS高程拟合精度的研究[J]. 测绘学报, 2008, 31(6): 260-264.
- 13. 潘树国, 王庆, 赵毅. GPS差分定位数据预处理关键技术的研究与实现[J]. 测控技术, 2006, 25(9): 25-28.
- 14. 张婷, 魏钢, 李洪力. GNSS接收机的发展概况[J]. 电子世界, 2013(23): 15.
- 15. 赵峰. RTK GPS定位技术在驾驶员道路考试中的应用[J]. 现代电子技术, 2012(15): 37-39.
- 16. 颜国军. 基于双天线的GPS姿态测定研究与实现[D]. 南京航空航天大学硕士论文, 2005.
- 17. 段曙光. GPS-RTK技术在地籍测量中的应用[J]. 测绘与空间地理信息, 2010, 33(1): 107-109.
- 18. 宋华明. 驾驶人科目二考试自动评判系统设计[J]. 山西科技, 2014, 29(6): 126-128.