Mechanical Engineering and Technology
Vol.06 No.01(2017), Article ID:19920,6
pages
10.12677/MET.2017.61002
Research on Space Moving Trajectory Planning of the Industrial Robot
Xiaoxiao Wang*, Lianjin Li*, Min Guo, Zhen Li, Xiaoli Liu, Jingjing Zhao
School of Mechanical Engineering, Tianjin University of Commerce, Tianjin

Received: Feb. 26th, 2017; accepted: Mar. 14th, 2017; published: Mar. 20th, 2017

ABSTRACT
An optimization method is proposed aiming at the problem that it is often inefficient and easy to interfere with production since the domestic enterprises mainly rely on the technicians to carry out the trajectory planning of the robot. For this kind of situation, based on the analysis of the structure features of the robot and process analysis, using the finite element method to establish the virtual prototype model of the robot, the simulation calculates the end of the model and the moving trajectory of each joint, and compared with the mathematical solution results of special points, the reliability of the virtual prototype model is verified, the optimal moving trajectory of the robot is determined and the basis for the design, manufacture and use of the robot is provided.
Keywords:Robot, Trajectory Planning, Motion Simulation, Computational Model
工业机器人的空间运行轨迹规划研究
王肖潇*,李连进*,郭珉,李珍,刘晓丽,赵静静
天津商业大学机械工程学院,天津

收稿日期:2017年2月26日;录用日期:2017年3月14日;发布日期:2017年3月20日

摘 要
针对国内企业目前主要依靠技术人员进行机器人运行轨迹规划时,常出现效率低和容易发生干涉而影响生产的问题,提出了一种优化计算方法。在对机器人的结构特点和工艺分析的基础上,运用有限元方法建立机器人的虚拟样机模型,仿真计算出模型的末端和各关节的运行轨迹,并与特殊点的数学求解结果进行对比,验证了虚拟样机模型的可靠性,确定机器人的最优运行轨迹,为机器人的设计制造及使用提供依据。
关键词 :机器人,路径规划,运动仿真,计算模型

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着工业自动化技术的发展,具有较高的智能水平的工业机器人逐渐成为工业生产线中的重要组成部分,促进了生产线向着高节拍、高柔性化的方向发展 [1] 。当然,利用工业机器人代替人工作业,可减轻工人的劳动强度,提高劳动率。但机器代替人工作业,需要进行运行轨迹设计和运动学分析,即进行机械人各关节的运行轨迹和速度及加速度分析,而多连杆机构组成的机器人是多自由度的串联空间机构,其运动学和动力学问题分析难度很大 [2] [3] 。
目前,生产企业技术人员普遍根据生产经验,参考产品图纸和工艺卡及车间设备布局,规划出运行轨迹,并编制程序写入相应的设备中,现场技术人员根据规划运行轨迹实时调试机器人,最终根据生产现场实制订一条无碰撞的运行轨迹 [4] 。这种依赖技术人员经验的运行轨迹方法缺乏严格的理论依据,会因人而异,难于保证所规划的运行轨迹是最优的,也有可能导致设备之间发生干涉的现象 [5] 。
2. 工业机器人的运动分析
工业机器人一般采用关节式结构,由一系列连杆通过铰接组成的开环串联系统,用电动机驱动关节转动,即底座与躯干、躯干与肩、肩与手臂、手臂与手腕、手腕与操作手都通过转动副相连,而操作手可以操纵各种工具完成所需的作业 [6] 。
因此,机器人的运动是由机器人各关节角(![]() )和连杆长度,计算机械人上某一点的位置和方向,建立机器人的运动学方程和解决姿态求解问题。简单的方法就是对每个连杆都沿关节轴建立一个附体坐标系,然后求解附体坐标系相对于参考坐标系的转动和移动,获得其运动的姿态(图1)。
)和连杆长度,计算机械人上某一点的位置和方向,建立机器人的运动学方程和解决姿态求解问题。简单的方法就是对每个连杆都沿关节轴建立一个附体坐标系,然后求解附体坐标系相对于参考坐标系的转动和移动,获得其运动的姿态(图1)。
在实际工作过程中,机器人的操作执行部(操作手)要与工件保持一定角度,并沿着规划运行轨迹的方向移动。因此,生成机器人作业文件需要确定操作手的位置坐标和旋转角度。
3. 工业机器人的仿真模型
数字模拟计算常用的应用软件为美国MSC公司的ADAMS,这是一种用有限元方法建立机械系统的计算模型,通过运动学和动力学分析,能够输出载荷、速度、加速度及位移曲线,检测机械系统的运行轨迹和干涉,预测机械系统的性能。
本机器人由底座、躯干、肩、手臂及手构成,除在机座与地基联接处为固定约束外,其它各关节均为转动关节,所以底座与躯干、躯干与肩、肩与手臂、手臂与手腕、手腕与操作手处均施加驱动,控制转动副的运动。
![]()
Figure 1. Coordinate system of industrial robot
图1. 工业机器人的坐标系
3.1. 避免运动干涉的方法
机器人实际使用工位一般都处于设备密集的场所,因此在实际执行任务时极有可能与附近工位的其他设备发生运动干涉,这种干涉主要都是动态干涉。
解决这种干涉的方法一是在机器人运行路径中设置障碍点,用于改变机器人的运行路径,使其绕开障碍物;二是定义机器人的运行优先权,优先权高的机器人先运行,优先权低的等待;三是延迟机器人或某台相干涉设备的启动时间,即使相互干涉的机器人或设备不同时启动。
3.2. 运行的节拍分析
机器人的运行节拍是机械结构运动学仿真分析的关键步骤之一。通过运行节拍分析能够估算运行的极点位置和工位节拍,将理论计算分析结果与生产实践效果进行对比,可以提高机器人运行轨迹的正确性及调试工作的效率。
4. 机器人的运动仿真与分析
机械手各关节角的位移、速度、加速度保证运行不发生干涉和位置精度的重要参数,也是研究机器人运动学和动力学的重要参数。本文基于工业机器人的运动仿真模型采用ADAMS软件计算结果,绘制机械手的运动过程轨迹,计算这些参数在机器人运行过程中的变化情况,获得机器人各关节在运行周期内的运动特性曲线,以便在设计阶段及时发现设计中存在的不合理问题。
根据仿真计算结果,绘制的机械手空间运动的位移、速度及加速度曲线,如图2~图4所示。由图2可见,机械手在![]() 、
、![]() 及
及![]() 三个方向的位移曲线光滑连续,没有出现突变点,表明机器人在工作过程中的运行轨迹连续,不会出现运行停顿现象,符合机器人的运动要求;由图3可见,机械手在
三个方向的位移曲线光滑连续,没有出现突变点,表明机器人在工作过程中的运行轨迹连续,不会出现运行停顿现象,符合机器人的运动要求;由图3可见,机械手在![]() 、
、![]() 及
及![]() 三个方向的的运行速度曲线光滑连续,没有出现突变点,表明机械人在工作过程中的运行平稳,不会出现较大的抖动现象,能够保证运行平稳光滑;由图4可见,机械手在
三个方向的的运行速度曲线光滑连续,没有出现突变点,表明机械人在工作过程中的运行平稳,不会出现较大的抖动现象,能够保证运行平稳光滑;由图4可见,机械手在![]() 、
、![]() 及
及 三个方向的加速度曲线光滑连续,没有出现突变点,表明机械人在工作过程中的运行平稳,不会出现较大的振动冲击,能够保证运行质量。
三个方向的加速度曲线光滑连续,没有出现突变点,表明机械人在工作过程中的运行平稳,不会出现较大的振动冲击,能够保证运行质量。
通过ADAMS软件计算结果,分析各关节角的位移、速度及加速度,结果表明在机器人的整个运行过程中,机器人的底座与躯干、躯干与肩、肩与手臂、手臂与手腕、手腕与操作手都运动平稳,无突变
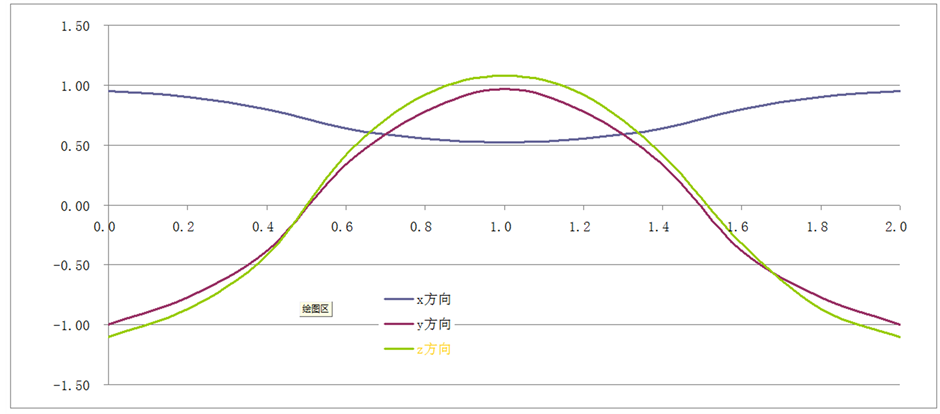
Figure 2. The displacement curve of industrial robot in x, y and z direction
图2. 机器人的x和y及z方向的位移曲线

Figure 3. The speed curve of industrial robot in x, y and z direction
图3. 机器人的x和y及z方向的速度曲线
点和剧烈抖动现象,表明运行平稳、无较大振动冲击。
由躯干绕底座转动的角位移曲线图5可见,躯干转动的角位移正、负峰值均为180˚,说明躯干绕底座的转动正好为一周,斜直线的曲线说明躯干的转动为匀速转动,符合实际情况。
5. 理论计算与运动仿真结果的对比
将建立仿真模型时的数据, 、
、 、
、 、
、 、
、 ,其它角度数据值为零,当机器人在
,其它角度数据值为零,当机器人在 平面内运行时,代入理论计算式,得:
平面内运行时,代入理论计算式,得:


这一理论计算与运动仿真值非常接近,两者结果一致就说明运动仿真结果正确。
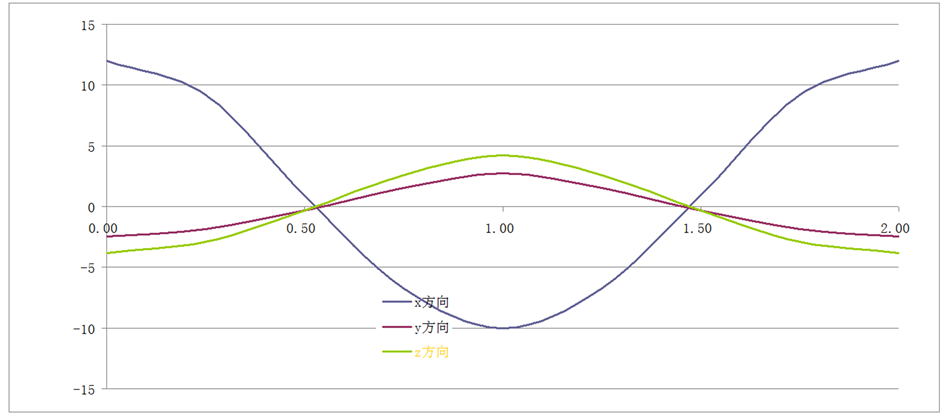
Figure 4. The acceleration curve of industrial robot in x, y and z direction
图4. 机器人的x和y及z方向的加速度曲线
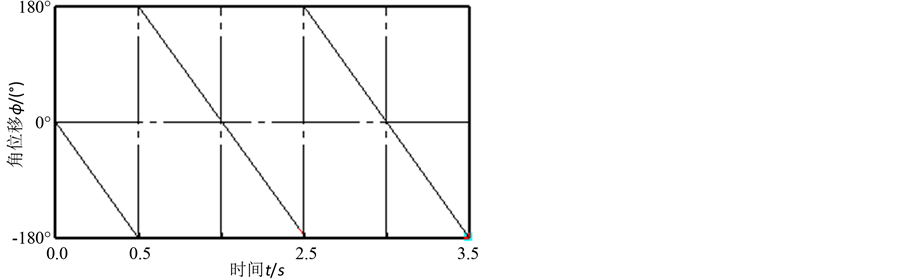
Figure 5. Angular displacement for trunk and base joint
图5. 躯干绕底座转动的角位移曲线
6. 结论
(1) 运用有限元软件生成三维仿真模型,模拟计算机器人的运行轨迹、速度及加速度,检查运动干涉和节拍分析,可有效避免工作过程中出现的问题,面向空间机器人的路径规划具有较大的实用价值。
(2) 通过理论计算和运动仿真结果的对比,确认了机器人能够按照预定的轨迹运行,各关节的位移、速度及加速度曲线连续、平稳、运动性能良好,无干涉现象发生。
(3) 结合具体工艺要求的机器人运行轨迹自动规划是确认机器人的末端姿态是否到位、运行是否平稳及是否发生干涉等的关键,本文提出的机器人运行轨迹计算方法能为机器人的智能化应用和最优运行轨迹的设计提供依据。
基金项目
国家级大学生创新创业训练计划项目(201510069031)。
文章引用
王肖潇,李连进,郭珉,李珍,刘晓丽,赵静静. 工业机器人的空间运行轨迹规划研究
Research on Space Moving Trajectory Planning of the Industrial Robot[J]. 机械工程与技术, 2017, 06(01): 11-16. http://dx.doi.org/10.12677/MET.2017.61002
参考文献 (References)
- 1. 崔鲲, 戴明. 冗余自由度弧焊机器人路径自主规划的优化控制[J]. 焊接学报, 1998, 19(3): 190-196.
- 2. 赵娜, 岳建锋, 李亮玉. 双机器人主从协调焊接的路径规划算法[J]. 焊接学报, 2015, 36(3): 67-70.
- 3. 闫华, 刘极峰, 邱胜海, 王孜凌. 空间焊缝弧焊机器人焊接路径自动规划研究[J]. 机械设计与制造, 2005(8): 106-107.
- 4. 姜宇, 张丽. 基于GA及ROBCAD的机器人路径规划与仿真研究[J]. 组合机床与自动化加工技术, 2015(6): 105-108.
- 5. 王玉, 王旗华, 赵建光, 张兆隆. 焊接机器人虚拟样机轨迹模拟和运动仿真分析[J]. 焊接学报, 2012, 33(4): 109-112.
- 6. 胡绳荪, 王明建, 申俊琦, 等. J形坡口焊接机器人运动控制系统设计[J]. 天津大学学报(自然科学与工程技术版), 2014, 47(4): 371-376.