Mechanical Engineering and Technology
Vol.
08
No.
04
(
2019
), Article ID:
31763
,
17
pages
10.12677/MET.2019.84036
Design of Elevator Buffer Based on Inverse Screw Mechanism and Dynamic Characteristics Analysis
Tao Li, Shougen Zhao*, Yujin He, Donghai Li
School of Aeronautics and Astronautics, Beijing University of Aeronautics and Astronautics, Beijing

Received: July 28th, 2019; accepted: August 12th, 2019; published: August 19th, 2019

ABSTRACT
The buffer is the key device for ensuring passenger safety when an emergency occurs. In this paper, a new type of elevator buffer with constant-force is designed by using cam-spring constant torque and inverse screw drive mechanism. The working principle of the buffer is studied based on the impact dynamics theory, and the dynamic characteristics analysis and dynamic simulation, the performance curve of the buffer and the performance optimization parameters are obtained. The results show that the buffer has excellent cushioning performance, with the advantage of not taking up the pit space.
Keywords:Buffer, Constant Force Mechanism, Inverse Screw Drive Mechanism
基于逆螺旋机构的电梯缓冲器设计及动力学 特性分析
李 涛,赵寿根*,何玉金,李东海
北京航空航天大学航空科学与工程学院,北京

收稿日期:2019年7月28日;录用日期:2019年8月12日;发布日期:2019年8月19日

摘 要
缓冲器是目前电梯运行发生紧急情况时确保乘客安全的关键装置。本文采用凸轮–弹簧式恒力矩和逆螺旋传动机构设计了一种具有恒定缓冲力的新型缓冲器,基于冲击动力学理论研究了该缓冲器的工作原理,并进行了动力学特性分析和运动仿真,得到了缓冲器的性能曲线及性能优化参数。研究结果表明该缓冲器具有优良的缓冲性能和良好的性能可设计性,且有不占用底坑空间的优点。
关键词 :缓冲器,恒力矩机构,逆螺旋传动机构

Copyright © 2019 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
缓冲器作为保障电梯运行安全的最后一道防线,本质上是一种缓冲吸能装置,在电梯发生撞底或冲顶时能够在规定行程内将轿厢动能消耗或储存起来,使其安全减速直至停止。安全性和经济性是对缓冲器设计评价的两个重要指标。一方面,具有恒定缓冲力的缓冲器能提供有力的安全保障,达到匀减速缓冲的理想效果。另一方面,缓冲器总行程与额定运行速度成正比,随着电梯运行速度的提高,用于安装缓冲器的电梯底坑深度也随之大大加深,造成了建筑空间资源的浪费,因此浅底坑化设计是电梯缓冲器技术发展的新趋势 [1] [2] [3] 。
在电梯发展初期,由于电梯运行速度较小(一般小于1 m/s),多采用弹簧式缓冲器,其缓冲力与缓冲行程为线性关系。随着电梯运行速度的加快,弹簧式缓冲器由于其回弹特性逐渐被油压式缓冲器所取代 [4] 。油压式缓冲器通过液体流动的阻尼效应消耗冲击能量,其缓冲力与行程的关系主要取决于节流孔口的布置形式,梯形凸台式和多孔式的缓冲力–行程曲线最接近于理想曲线,但通用性差只能在冲击速度与质量确定的情况下方可实现。同时,油压式缓冲器安装于电梯底坑底部,在缓冲行程较长的情况下,自身结构尺寸较大,造成了建筑空间资源的极大浪费 [5] [6] [7] [8] 。因此,本文针对高速电梯缓冲器设计要求,提出了一种具有恒定缓冲力、小尺寸的新型缓冲器设计方案。
恒力机构和恒定力矩机构原理上是相通的,国内外均有相应的研究。德国LISEGA公司开发了一种主辅式恒力支吊架,在管道系统由于温度变化发生变形时提供稳定的支持力 [9] ;美国的一篇专利介绍了一种健身器材,其中的恒力机构可以提供行程较长且稳定的拉力,但是体积较大 [10] ;中国兵器工业研究所设计了一种恒力弹性机构,可以平衡火炮发射引起的后坐力,但缓冲行程较小 [11] 。恒定力矩机构通过转筒即可转化为恒力机构,二者在原理上是相通的。为测量无重力条件下的物体质量清华大学设计一种恒定力矩机构,利用特殊设计的凸轮和弹簧机构获得稳定的扭矩,配合卷筒即可输出恒力,输出行程较长 [12] [13] [14] ;台湾国立大学利用簧片变形原理设计了一种恒定力矩机构,用于辅助关节康复,但输出力矩较小且簧片加工复杂 [15] ;哈尔滨工业大学基于现有弹簧拉锁式恒力机构进行了改进,设计了一种串联张紧式恒定力矩机构,但输出角度较小不适用于输出恒定缓冲力 [16] 。
螺旋机构在机械设计中获得了广泛应用,主要用于输入旋转运动输出直线运动,如滚珠丝杆机构;与之相反,能实现输入直线运动输出旋转运动的机构称为逆螺旋机构 [17] 。机械设计中能实现输入直线运动输出旋转运动的机构主要有三类:一是齿轮–齿条机构,主要特征是啮合特性好,传动平稳,但是长行程、高精度的齿条加工困难;二是曲柄滑块机构,主要用于输出摆动;三是逆螺旋机构,如液压螺杆式、逆滚动螺旋式,传动效率高但输出行程较短。梁锡昌等人基于逆螺旋机构设计了一种翼面旋转作动器,可将油缸的直线运动直接转换为旋转运动,具有输出扭矩大、直径小的特点,但不能输出连续转动 [18] ;重庆大学王光建博士基于逆滚动螺旋机构设计了新型机器人旋转关节,具有尺寸小、精度高、可承受较大负载的优点 [19] 。
本文针对具有恒定缓冲力和小尺寸、浅底坑的设计需求提出了一种新型缓冲器设计方案,对动力学特性进行了分析。研究了逆螺旋传动机构动力学参数、外加力矩与缓冲力之间的关系,获得了缓冲性能曲线及性能优化参数。
2. 新型电梯缓冲器方案设计
2.1. 恒力矩机构设计
新型缓冲器主要由弹簧缓冲机构、逆螺旋机构、恒力矩机构和双向棘轮机构组成,逆螺旋机构与弹簧缓冲机构之间通过缓冲平台相连,恒定力矩机构、棘轮机构和逆螺旋机构之间通过齿轮–转轴相连,如图1所示。
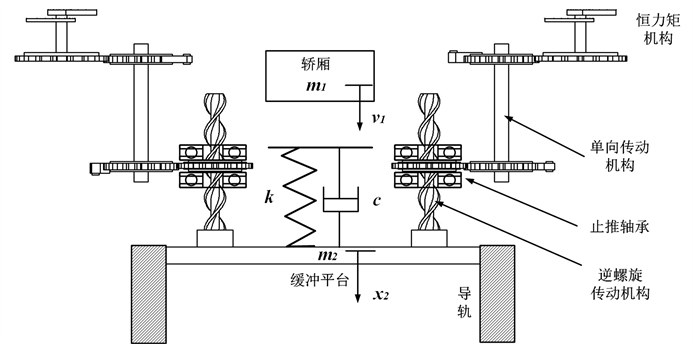
Figure 1. Sketch of a new type of high speed elevator buffer
图1. 新型高速电梯缓冲器结构示意图
如图2所示凸轮-弹簧式恒力矩机构的设计重点在于凸轮轮廓线的合理设计,根据力矩恒定条件可得:
(1)
式中:k——弹簧刚度,单位N/mm;
f——弹簧初始伸长量,单位mm;
——凸轮任意角度对应的弧长,单位mm;
——凸轮任意角度对应的半径,单位mm;
T——恒定力矩值,单位Nm。
在忽略钢丝绳绕过定滑轮后的角度误差且假设钢丝绳在凸轮上纯滚动,则弹簧后续变形量与转过的凸轮轮廓线弧长相等,由变形协调条件可得:
(2)
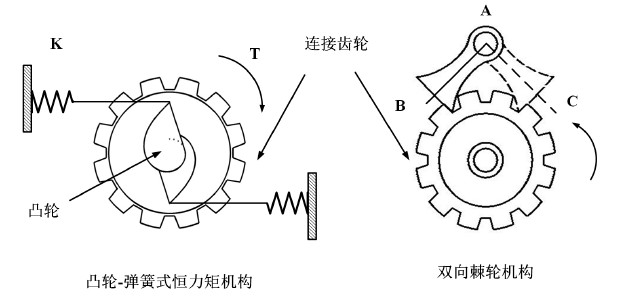
Figure 2. Sketch of Constant torque mechanism and bidirectional
图2. 恒力矩机构与双向棘轮机构
式中: ——凸轮转过的角度,rad;
——凸轮转过角度对应的弧长,mm。
同理,由初始条件可得:
(3)
式中: ——凸轮转过 后对应的弧长,mm;
——凸轮初始半径,mm;
——凸轮转过 后的半径,mm。
2.2. 逆螺旋传动机构设计
逆螺旋机构主要由螺杆、转盘、止推轴承、缓冲平台和导轨组成。如图3所示,螺杆外圈由两条圆柱螺旋线引导生成,内圈为圆柱;转盘外圈为齿轮结构,通过转轴与恒力矩机构和棘轮机构相连,内部有与螺杆圆柱螺旋线相切的圆弧型孔;转盘上下配有止推轴承,螺杆下部与缓冲平台相连,缓冲平台又与导轨相连。
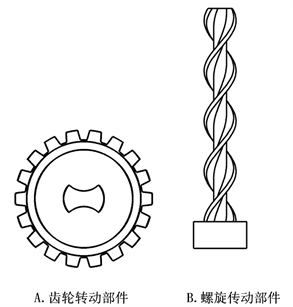
Figure 3. Sketch of reverse screw drive mechanism
图3. 逆螺旋传动机构示意图
2.3. 新型缓冲器工作原理
当电梯运行出现紧急情况时,缓冲平台在电梯轿厢的冲击作用下开始向下运动,通过逆螺旋传动机构将冲击运动转化为转盘的旋转运动,从而带动凸轮转动将冲击能量储存至恒力矩机构中,保证轿厢平稳减速直至停止。在轿厢缓冲过程中所获得的恒定缓冲力来源于螺杆与转盘之间的碰撞接触力。
为避免在缓冲平台和轿厢直接发生刚性碰撞,在平台与轿厢之间加入了弹簧缓冲机构。同时,为了避免缓冲平台反弹造成二次冲击,在逆螺旋机构和恒力矩机构之间加入了双向式棘轮机构,控制齿轮转动的方向。
3. 逆螺旋传动机构受力分析与仿真计算
3.1. 逆螺旋机构受力分析
为更好的指导新型高速电梯缓冲器设计,需要对逆螺旋传动机构进行受力分析和运动分析,研究系统运动状态、结构参数等因素对系统受力情况的影响,结合动力学仿真结果得到缓冲力–行程曲线。
已知在沿螺杆轴向拉力FZ和垂直于转盘平面向上的扭矩TZ作用下,系统达到静平衡状态,对螺杆作受力分析如图4所示。螺杆与转盘在圆弧孔上有两个接触点且关于中心对称,设接触点正压力为P,摩擦力为f,则对逆螺旋机构作受力分析如下:

Figure 4. Sketch of force analysis
图4. 逆螺旋机构受力分析
(4)
式中:α——圆柱螺旋线升角,单位rad;
r——圆柱螺旋线半径,单位m;
μ——滑动摩擦系数;
p——碰撞接触力,单位N;
FP——接触力在Z方向的分力,单位N;
TP——接触力在Z方向的扭矩,单位N·m;
FX——接触力在X方向的分力,单位N;
FZ——Z方向上外力,单位N;
TZ——Z方向上外力矩,单位N·m。
由此可得在逆螺旋机构结构系统参数确定时轴向拉力FZ与扭矩TZ之间的关系如下;
(5)
式中:λ——拉力–扭矩比例系数。
由此可知在滑动摩擦系数和螺杆半径不变的情况下,拉力-扭矩比例系数仅和圆柱螺旋线升角的正切值有关,在 的范围内,λ随着螺旋升角的增大而减小。
同理对螺杆加速度不为零的情况作受力分析。由圆柱螺旋线特性知螺杆轴向位移与转盘旋转角度之间存在线性关系:
(6)
式中:x——螺杆轴向位移,单位m;
θ——转盘旋转角度,单位rad;
h——圆柱螺旋线导程,单位m。
对x进行两次求导可得:
(7)
在恒力矩TZ和轴向拉力FZ作用下,建立系统运动微分方程如下:
 (8)
(8)
式中:m——螺杆质量,单位kg;
J——转盘转动惯量,单位kg·m2。
代入式(5)可得:
(9)
其中TZ是由恒力矩机构提供的,在运动过程中大小相对稳定,通常取500 N·m;J为转盘转动惯量,通常取0.01 kg·m2。扭矩数值远大于转动惯量,因此在加速运动过程中逆螺旋机构产生的轴向接触力大小主要由扭矩决定,保持相对稳定。
3.2. 逆螺旋机构运动仿真分析
为验证逆螺旋机构设计的合理性,分析运动参数和逆螺旋机构结构参数对其传动特性与传力特性的影响,利用ADAMS软件进行运动仿真分析。如图5所示,在ADAMS软件中导入逆螺旋机构的三维实

Figure 5. Dynamic simulation model
图5. 动力学仿真模型
体模型。按照多体动力学仿真分析步骤,依次对其定义材料属性、运动约束、碰撞接触力设置、初始条件设置 [17] 。
螺杆在直线运动过程中通过与转盘之间的接触传递运动,使转盘克服反方向扭矩做匀速转动,因此需要对螺杆与转盘之间的接触参数进行设置。ADAMS中有两种定义碰撞力的方法:一种是补偿法(Restitution);另一种是冲击函数法(Impact)。由于前者参数设置正确较为困难,因此实际应用中多采用冲击函数法来定义碰撞力,其一般表达式为:
(10)
式中: ——两碰撞物体初始距离;
q——碰撞过程中的实际距离;
k——刚度系数,单位穿透深度所产生的力;
e——碰撞过程中非线性刚度力指数;
——接触边界的最大阻尼系数;
d——切入深度。
为使阻尼力连续,采用了STEP函数,其一般形式为 ,可按式(11)进行计算
(11)
式中: ; 。
仿真模型为钢对钢接触,动摩擦系数μ取0.16,刚度k取100,000 N/mm;碰撞指数e取1.5;最大阻尼系数通常设为刚度系数的0.1%~1%,此处取100;切入深度d一般取0.1 mm较为合适。为保证仿真结果精确,提高计算效率,本次计算采用积分器为WSTIFF刚性积分器,其积分格式为SI2。
由式(6)可知逆螺旋机构螺杆直线位移与转盘角位移之间存在线性关系,等式两端同时对时间求导可得螺杆速度、加速度与转盘角速度、角加速度之间也存在线性关系,如式(12)所示。
(12)
已知逆螺旋机构螺旋升角 ,半径 ,扭矩 。对其进行运动仿真,结果如图6所示。
图6(a)螺杆在做匀速直线运动时转盘角位移随时间变化曲线图,从中可知当螺杆做匀速直线运动时转盘也在做匀速旋转运动,且由式(12)可求得不同螺杆运动速度下转盘角速度的理论值,将转盘角速度理论计算结果与仿真结果相比较,如表1所示。
由表1可知逆螺旋机构运动仿真的结果与理论计算值误差很小,证明了螺杆在做匀速直线运动时逆螺旋机构可以输出匀速转动。
图6(b)为螺杆在做匀加速直线运动时转盘角位移随时间变化曲线图,从中可以知当螺杆做匀加速直线运动时转盘也在做匀加速旋转运动,同理得到不同螺杆运动加速度下转盘角加速度的理论结果与仿真结果,二者比较如表2所示。
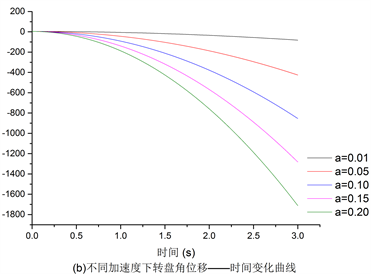
Figure 6. Results of dynamic simulation
图6. 动力学仿真结果

Table 1. Error analysis of angular velocity simulation
表1. 角速度仿真结果误差分析
Table 2. Error analysis of angular acceleration simulation
表2. 角加速度仿真结果误差分析
由表2可知逆螺旋机构运动仿真的结果与理论计算值误差很小,证明了螺杆在做匀加速直线运动时逆螺旋机构可以输出匀加速转动。
综上所述,对逆螺旋机构的仿真结果证明了其可将螺杆的直线运动依照固定比例转化为旋转运动,具有良好的传动特性。
3.3. 逆螺旋机构碰撞接触力仿真分析
已知逆螺旋机构螺旋升角 ,半径 ,扭矩 ,对逆螺旋机构碰撞接触力进行仿真计算,结果如图7所示。如图7(a)~(c)所示,螺杆做匀速直线运动时缓冲力(碰撞接触力在Z方向的上的分力)随时间变化曲线可知,随着螺杆运动速度的增加,缓冲力波动频率也随之增加,但在传动过程中缓冲力最大值、最小值、有效值基本保持不变,最大值稳定在25,000 N左右,最小值稳定在20,000 N左右,有效值稳定在23,140 N左右,证明了缓冲力有效值与螺杆运动速度无关。
由式(5)可得,扭矩 时缓冲力的理论值为23,015 N。理论值与仿真结果的有效值相差很小,其相对误差为0.557%,说明逆螺旋机构具有良好的传力特性。同理,保持其余条件不变,得到在不同螺旋升角条件下缓冲力理论值与仿真结果有效值,作误差分析如表3所示。
 (a) v = 0.01 m/s时缓冲力–时间
(a) v = 0.01 m/s时缓冲力–时间
 (b) v = 0.10 m/s时缓冲力–时间
(b) v = 0.10 m/s时缓冲力–时间
 (c) v = 0.20 m/s时缓冲力–时间
(c) v = 0.20 m/s时缓冲力–时间
 (d) a = 0.01m/s2时缓冲力–时间
(d) a = 0.01m/s2时缓冲力–时间
 (e) a = 0.10 m/s2时缓冲力–时间
(e) a = 0.10 m/s2时缓冲力–时间
 (f) a = 0.20 m/s2时缓冲力–时间
(f) a = 0.20 m/s2时缓冲力–时间
Figure 7. The results of dynamic simulation
图7. 不同运动螺杆运动条件下缓冲力–时间变化曲线
Table 3. Error analysis of buffer force simulation
表3. 缓冲力结果误差分析
由表3可得在不同螺旋升角条件下,缓冲力理论值与仿真结果相比误差很小,证明逆螺旋机构机构具有良好的传力特性。
在螺杆做匀加速直线运动,扭矩 的条件下,对逆螺旋机构碰撞接触力进行仿真计算,结果如图7(d) &图7(f)所示。在匀加速直线运动过程中,缓冲力在起始时有一个快速上升阶段,随后稳定在23,000 N附近波动,且波动的频率随着加速度的提升而逐渐增大。整个过程中,缓冲力最大值、最小值基本保持不变,有效值随着加速度的增大略有增加,与式(9)理论分析结果相吻合。由此可知逆螺旋机构在不同运动条件下均可输出稳定的缓冲力,且缓冲力有效值与理论计算结果相吻合,符合新型缓冲器设计方案的预期目标。
根据仿真结果得到了缓冲力——行程的变化曲线,如图8所示。
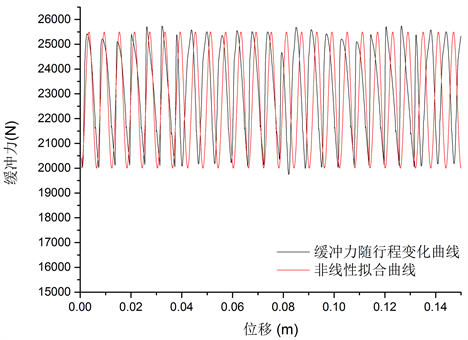
Figure 8. Buffer force versus displacement curve
图8. 缓冲力随行程变化曲线
如图8所示,在逆螺旋机构运动过程中,螺杆与转盘之间存在周期性的接触与分离,因此缓冲力也具有相应的周期特性,可利用非线性函数对其进行拟合。拟合函数为:
(13)
拟合结果如下:
(14)
如图8所示可知,非线性拟合曲线与缓冲力–行程曲线在最大值、最小值、有效值以及波动周期上基本保持一致,拟合结果较好。
4. 冲击响应求解与数值仿真计算
4.1. 冲击响应求解
缓冲器动力学模型如图9所示,则缓冲器运动微分方程如下:

Figure 9. Dynamic model of buffer
图9. 缓冲器动力学模型
(15)
式中: ——电梯轿厢质量,单位kg;
——缓冲器缓冲平台质量,单位kg;
——电梯轿厢位移,单位m;
——缓冲平台位移,单位m;
k——弹簧刚度系数,单位N/m;
c——阻尼系数,单位N·s/m;
n——逆螺旋装置个数。
其中P(x)为单个逆螺旋装置提供的缓冲力,可按式(16)进行计算:
(16)
式中:FZ——Z方向上外力,单位N;
FP——碰撞接触力在Z方向的分力,单位N;
P——缓冲力有效值,单位N。
其中
从式(16)可知:
1) 缓冲初始阶段,在恒力矩机构和单向传动机构的作用下,缓冲平台保持静止直到Z方向外力达到临界值P;
2) 在缓冲运动过程中缓冲力P(x)与加速度有关,相当于增加了缓冲平台的等效质量;
令 整理得到相对运动微分方程:
(17)
其中
解得:
(18)
其中 , , , ,待定系数A,B可由初始条件确定:
(19)
将其代入运动微分方程式(13)得:
(20)
其中
从式(18)可以得出以下结论;
1) m1加速度由两个常数项和一个振幅不断衰减的波动项组成,符合匀减速缓冲的设计目标;
2) 轿厢缓冲过程的平均减速度主要由缓冲力有效值P决定;
3) 在弹簧刚度一定的情况下,轿厢最大减速度随着阻尼系数的增加先减小后增加;在阻尼系数一定的情况下,最大减速度随着刚度的增加而增加。
4.2. Simulink仿真计算
为了一步分析新型缓冲器动力学参数与冲击响应参数之间的关系,结合缓冲力-行程拟合函数进行数值仿真计算。已知电梯轿厢最大质量m1 = 2500 kg,额定运行速度v = 5 m/s,缓冲平台质量m2 = 100 kg,逆螺旋机构螺旋线升角α = 45˚,圆柱螺旋线半径r = 0.03 m,逆螺旋机构个数n = 4,转盘转动惯量J = 0.012 kg·m2 (图10)。

Figure 10. Simulation block diagram
图10. 数值仿真框图
弹簧刚度k取1.50 × 105 N/m,阻尼比ξ取为0.3,扭矩 时,缓冲力有效值为12,750 N,缓冲力-行程拟合函数为:
(21)
如图11所示,基于缓冲力有效值的冲击响应计算结果与理论计算结果相吻合。初始时冲击加速度响应较大,随后逐渐减小并稳定在−9.8 m/s2附近,m2停止运动后,m1在残余速度下做振荡衰减运动直至停止。基于缓冲力拟合值的计算结果与基于有效值的计算结果主要不同在于加速度在达到最小值后逐渐增大并在−9.8 m/s2附近波动。而冲击速度与冲击位移在不同缓冲力条件下变化不大。
 (a) P(X)为有效值时冲击加速度–时间
(a) P(X)为有效值时冲击加速度–时间
 (b) P(X)为有效值时冲击速度–时间
(b) P(X)为有效值时冲击速度–时间
 (c) P(X)为有效值时冲击位移–时间
(c) P(X)为有效值时冲击位移–时间
 (d) P(X)为拟合值时冲击加速度–时间
(d) P(X)为拟合值时冲击加速度–时间
 (e) P(X)为拟合值时冲击速度–时间
(e) P(X)为拟合值时冲击速度–时间
 (f) P(X)为拟合值时冲击位移–时间
(f) P(X)为拟合值时冲击位移–时间
Figure 11. Numerical results of impact response under different buffer force
图11. 不同缓冲力条件下冲击响应数值计算结果
根据缓冲性能要求,将缓冲系数HC和最大反弹速度Vb作为缓冲器缓冲性能评价指标。阻尼比ξ与缓冲系数HC可由式(22)求得:
(22)
式中:amax——m1缓冲过程中最大减速度,单位m/s2;
xmax——m1缓冲过程中最大位移,单位m。
根据《电梯制造与安装安全规范》规定 [1] ,电梯缓冲器工作时反弹速度不得超过1 m/s,因此为分析弹簧刚度与阻尼比对反弹速度和缓冲系数的影响,分别取弹簧刚度k为1.00 × 105 ,1.25 × 105 ,1.50 × 105,1.75 × 105,2.00 × 105 N/m ,阻尼比ξ取值范围为0~1,进行数值仿真计算,结果如图12、图13所示。
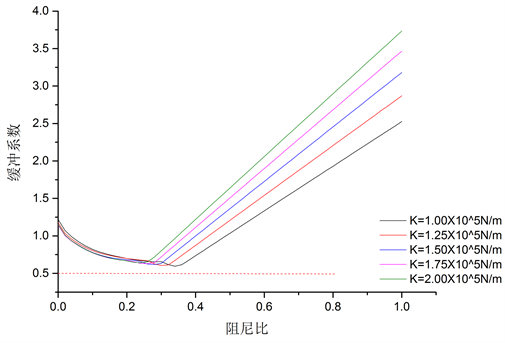
Figure 12. The curves of buffer coefficient versus damping ratio under different stiffness coefficients
图12. 不同刚度下缓冲系数随阻尼比的变化曲线
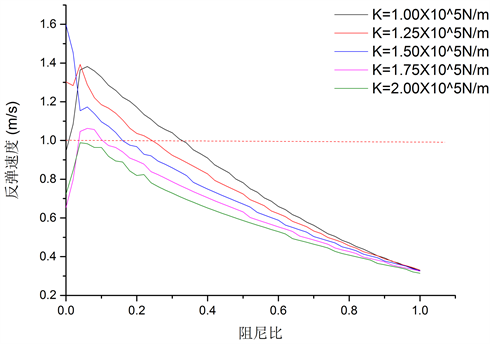
Figure 13. The curves of rebound velocity versus damping ratio under different stiffness coefficients
图13. 不同刚度下反弹速度随阻尼比变化曲线
由仿真结果可以得出以下结论:
1) 缓冲系数随着阻尼比的增加,先减小后增大,存在最优阻尼比使得该刚度下的缓冲系数取得最小值;
2) 反弹速度随着阻尼比的增加,先增大后减小,且随着刚度的增加,反弹速度不断减小;
3) 如表4所示,随着刚度的增加,最优阻尼比与反弹速度不断减小,但最小缓冲系数不断增大。
Table 4. Optimal parameters under different stiffness
表4. 不同刚度下的最优化参数
根据翁雪涛 [20] 等人的计算,传统弹簧式缓冲器缓冲系数一般在1以上,当限位器带有一定阻尼时可以提升缓冲性能,最优值在0.8左右。与之相比,新型缓冲器缓冲系数最小值都在0.6左右,大大提高了缓冲性能。实际设计中,可先根据缓冲器对反弹速度的要求划定弹簧刚度和阻尼比选择范围,再根据不同刚度下的缓冲系数随阻尼比变化曲线,确定最小缓冲系数下的刚度和阻尼比。
5. 结语
本文系统性地研究了新型缓冲器的工作原理,该缓冲器由凸轮–弹簧式恒力矩装置和逆螺旋传动构件组成,缓冲器工作过程中产生不随位移变化而变化的恒力。通过对系统的动力学模型理论和仿真分析,得到了该类型缓冲器的性能曲线;在此基础上,进行了系统冲击响应计算,分析了系统动力学参数对缓冲性能的影响规律,得到了在不同刚度下缓冲系数、反弹速度随阻尼比的变化曲线,可为相关工程设计提供参考。本文算例也表明与传统弹簧式缓冲器相比新型缓冲器具有更加优良的缓冲性能,与应用最广泛的油压式缓冲器相比,本类型缓冲器具有良好的性能可设计性和不占用底坑空间的优点,可应用于高速电梯缓冲器设计领域。
文章引用
李 涛,赵寿根,何玉金,李东海. 基于逆螺旋机构的电梯缓冲器设计及动力学特性分析
Design of Elevator Buffer Based on Inverse Screw Mechanism and Dynamic Characteristics Analysis[J]. 机械工程与技术, 2019, 08(04): 286-302. https://doi.org/10.12677/MET.2019.84036
参考文献
- 1. GB7588-2003. 电梯制造与安装安全规范[S].
- 2. 黄旭, 王德山. 试论侧压式电梯底坑缓冲装置设计[J]. 中国设备工程, 2018(2): 132-133.
- 3. 姜青松. 电梯安全部件试验系统动力学及试验研究[D]: [硕士学位论文]. 武汉: 武汉轻工大学, 2016.
- 4. 张利平. 缓冲器原理与应用[J]. 现代机械, 1999(1): 49-51.
- 5. 陈占清. 活塞复位式液压缓冲器的研究[D]: [硕士学位论文]. 上海: 上海交通大学, 2007.
- 6. 姚荣康, 朱昌明, 詹永麒, 周琼. 带气囊式蓄能器的油压缓冲器的冲击研究[J], 振动与冲击, 2006, 25(1): 153-155.
- 7. 马培忠. 电梯用油压缓冲器原理与性能分析[J]. 中国电梯, 1995(2): 6-8.
- 8. 王敏, 朱昌明, 詹永麒, 姚荣康. 一种带气囊式蓄能器的新型缓冲器的动态特性研究[J]. 机械设计与研究, 2004, 20(3): 84-85.
- 9. 冯维明, 李辉. 恒力弹簧支吊架凸轮曲线方程推导[J]. 现代制造工程. 2006(8): 95-97.
- 10. Riley, R.Q. and Carey, D.L. (1979) Exercise Machine with Spring-Cam Arrangement for Equalizing the Force Required through the Exercise Stroke. US4231568, 1979-01-29.
- 11. 陈建, 邓利娟. 恒力弹性机构的设计[J]. 中国机械工程, 2010, 21(16): 1944-1946.
- 12. Yan, H., Li, L.M., Hu, C.H., et al. (2011) Astronaut Mass Measurement Using Linear Acceleration Method and the Effect of Body Non-Rigidity. Science China: Physics, Mechanics & Astronomy, 54, 777-782. https://doi.org/10.1007/s11433-011-4296-y
- 13. Fujii, Y., Fujimoto, H. and Namioka, S. (1999) Mass Measurement under Weight-Less Conditions. Review of Scientific Instruments, 70, 111-113. https://doi.org/10.1063/1.1149550
- 14. Shimada, K. and Fujii, Y. (2010) Issues with Body Mass Measurement on the International Space Station (ISS). Applied Mechanics and Materials, 36, 9-20. https://doi.org/10.4028/www.scientific.net/AMM.36.9
- 15. Hou, C.W. and Lan, C.C. (2013) Functional Joint Mechanisms with Constant-Torque Outputs. Mechanism and Machine Theory, 62, 166-181. https://doi.org/10.1016/j.mechmachtheory.2012.12.002
- 16. 牛福亮, 高海波, 刘振, 等. 一种串联张紧式恒力矩机构设计及实验研究[J]. 机器人, 2016, 38(4): 475-485.
- 17. 梁锡昌, 蒋建东, 李润方, 陈小安. 特种螺旋传动机构的研究[J]. 机械工程学报, 2003, 39(10): 106-110.
- 18. 梁锡昌, 王光建, 郑小光. 基于螺旋机构的旋转作动器研究[J]. 航空学报, 2003, 24(3): 282-285.
- 19. 王光建. 基于逆滚动螺旋的机器人关节的研究[D]: [博士学位论文]. 重庆: 重庆大学, 2005.
- 20. 翁雪涛, 朱石坚, 何琳. 限位器抗冲击计算[J]. 中国造船, 2002, 43(2): 85-89.
NOTES
*通讯作者。