Transmission and Distribution Engineering and Technology
Vol.05 No.03(2016), Article ID:18510,9
pages
10.12677/TDET.2016.53004
Design of Wide Area Power System Stabilizer Based on Fuzzy Adaptive PID
Pengpeng Zong, Jianchao Wu, Qinchen Yang, Jihong Yan, Peixiu Wang
School of Electrical Engineering, Southeast University, Nanjing Jiangsu

Received: Aug. 21st, 2016; accepted: Sep. 9th, 2016; published: Sep. 12th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
The design of wide area power system stabilizer is studied in this paper. Firstly, the principle and characteristics of PID control are analyzed, and the fuzzy self-tuning PID controller and its control method based on the characteristics of fuzzy control are presented in order to adapt to the randomness of power network. Based on the traditional PSS, the design flow of the wide area power system stabilizer is analyzed, and the fuzzy control language variables and membership functions are determined, and the fuzzy rules are formulated to control the control measures. Finally, the performance of controller designed is tested by the simulation of Two Area and Four Machine Grid System and a region of East China. Simulation results show that the controller can effectively adapt to the randomness of the power grid, improve the damping of the power system and improve the stability of the interconnected power system.
Keywords:Wide Area Measurement System, Fuzzy Control, PID Control, Low Frequency Oscillation

基于模糊自整定PID的广域电力系统稳定器设计
宗鹏鹏,吴健超,杨钦臣,闫济红,王培秀
东南大学电气工程学院,江苏 南京

收稿日期:2016年8月21日;录用日期:2016年9月9日;发布日期:2016年9月12日

摘 要
本文主要研究广域电力系统稳定器的设计。首先分析了PID控制的原理及特点,结合模糊控制的特点提出了模糊自整定PID控制器及其控制方法,以适应电网的随机性。基于传统的PSS,制定了广域电力系统稳定器的设计流程,确定了模糊控制语言变量和隶属函数,并制定了模糊规则,对控制措施进行具体化。最后通过两区四机系统以及华东地区某电网进行的仿真测试了控制器设计的性能。仿真结果表明,这种控制器能有效适应电网的随机性,改善电力系统的阻尼,提高互联电网的稳定性。
关键词 :广域测量系统,模糊控制,PID控制,低频振荡

1. 引言
随着大区域电网的互联,我国电力系统中低频振荡现象仍时有发生,已经成为影响互联电网安全稳定运行的重要问题之一 [1] 。由于风电等可在生能源的快速发展、需求侧响应等原因,系统实际运行工况的随机性和波动性都日益明显 [2] 。传统PSS参数的设计大多基于确定的系统模型,抗干扰的能力较差,考虑电力系统随机性的情况下往往效果一般 [3] 。模糊控制可以应对以上问题,模糊控制克服了过分依赖系统精确数学模型的缺点,对非线性电力系统具有一定适应能力。
文献 [4] 采用概率特征根分析的方法,比较了含附加阻尼控制器前后主要的概率特征根的变化;文献 [5] [6] 采用蒙特卡洛模拟方法进行概率小干扰稳定性分析,耗时严重,不利于在线计算;文献 [7] 采用伊藤公式判别小干扰稳定性,并用矩稳定性刻画小扰动稳定性;文献 [8] 采用概率特征根的方法研究电力系统稳定器参数设计,使得PSS具有在较宽系统运行方式下的整体合理性。文献 [9] 研究了一种PID型模糊控制器,并证明了这种模糊控制器近似于一种变参数的PID控制器,为设计稳定的模糊PID控制器提供了理论指导。文献 [10] 利用模糊逻辑系统,设计了SVC自适应控制器,可以有效控制系统的暂态稳定性。
本文基于模糊控制和PID控制各自的优势和局限性,把PID控制和模糊控制结合起来,构成模糊自整定PID控制,应用于广域电力系统阻尼控制,能够实现较好的控制效果。给出了励磁控制系统的组成和模糊自整定PID控制器的结构,说明了模糊自整定PID控制器的输入量和输出量以及模糊子集、隶属函数和模糊规则表。然后提出了模糊自整定PID控制器设计步骤,并且以两区四机系统以及某地区电网为例设计了模糊自整定PID控制器。
2. 模糊自整定PID控制
传统PID控制的特点是只需对控制器参数,即比例系数KP、积分系数KI和微分系数KD进行调整,就可获得满意的结果。传统PID控制器结构如图1,PID控制系统由PID控制器和被控对象组成,PID控制器是一种线性控制器。根据设定目标值r(t)与实际输出值y(t)构成的控制偏差e(t),将此偏差的比例,积分和微分通过线性组合构成控制量,对受控对象进行控制。
控制器控制方程为:
 (1)
(1)

Figure 1. Structure of traditional PID controller
图1. 传统PID控制器结构
控制器时域输出u(t)方程为:
 (2)
(2)
PID控制器设计的核心内容就是参数KP、KI和KD的整定,由于PID控制器要求精确的数学模型,当系统参数发生变化时,控制效果将大幅降低。考虑到电力系统的复杂性以及网络参数的时变性,运用PID控制器来调整时,必须合理的调整PID控制器的参数以适应电网的变化。本文采用模糊控制来对PID控制器中的参数进行调整,模糊自整定的PID参数调整结构如图2。
模糊控制的基本思想是,将人为手动控制的经验用语言加以描述,形成一系列条件语句,即控制规则,再利用模糊理论、模糊语言变量和模糊逻辑推理,将模糊的控制规则上升为数值运算,让程序实现控制规则,模拟人进行自动控制。本文模糊控制系统由模糊数据库、规则库、模糊化、模糊推理机和解模糊器组成。模糊控制器的输入一般为控制偏差 及其导数
及其导数 ,通过模糊推理以及由控制经验总结得到的规则库,自整定得到PID参数KP、KI和KD,这样可以使得在不同的网络状态下,自整定得到较为合理的PID参数,以适应网络的随机性,使得系统鲁棒性更强。如果用DSP实现模糊控制器以及PID控制,由于DSP较快的计算速度,模糊自整定PID控制器将不影响系统的实时性 [11] 。
,通过模糊推理以及由控制经验总结得到的规则库,自整定得到PID参数KP、KI和KD,这样可以使得在不同的网络状态下,自整定得到较为合理的PID参数,以适应网络的随机性,使得系统鲁棒性更强。如果用DSP实现模糊控制器以及PID控制,由于DSP较快的计算速度,模糊自整定PID控制器将不影响系统的实时性 [11] 。
3. 广域电力系统稳定器设计
目前大型发电机大多安装了电力系统稳定器PSS (Power System Stabilizer),PSS可以提高电力系统阻尼,从而增强系统动态稳定性。常见的传统PSS模型如图3。
广域测量系统WAMS (Wide Area Measurement System)提供的广域信号用于附加励磁控制可以改善互联电力系统的阻尼。目前广域PSS输入的广域信号有发电机轴转速、转子角和联络线功率等。发电机转速差是抑制电力系统区间低频振荡最有效的广域附加稳定信号之一,所以本文利用发电机转速差作为广域PSS的输入信号。广域PSS采用模糊自整定控制,如图4。广域信号通过PID控制后,经过传统的PSS的移相环节,传递到励磁环节,提供阻尼,使得系统保持动态稳定。模糊控制输入信号一般采用广域PSS的输入信号及其导数,来改变PID控制器的参数,以适应系统的随机性。一般来数,如果PID控制器的增益过大,可能会引起持续的小震荡,不利于系统快速恢复稳定;如果PID的增益过小,则广域控制器的效果不明显。
模糊控制器的输入语言变量误差 及其导数
及其导数 ,PID参数KP、KI和KD为输出语言变量。他们的模糊子集分别为NB (负大)、NS (负小)、Z (零)、PS (正小)、PB (正大)。这种划分适应控制品质一般的场合,在平息低频振荡中,这种划分已经足够。
,PID参数KP、KI和KD为输出语言变量。他们的模糊子集分别为NB (负大)、NS (负小)、Z (零)、PS (正小)、PB (正大)。这种划分适应控制品质一般的场合,在平息低频振荡中,这种划分已经足够。
常见的模糊状态隶属函数有对称三角形、对称梯形、正态型隶属函数。因为三角形隶属函数其形状仅与它的直线斜率有关,运算较简单,所占内存空间也小,因此比较适合于有隶属函数在线调整的模糊控制。在此选三角形为语言变量的隶属函数,如图5。

Figure 2. Structure of Fuzzy controller
图2. 模糊控制器结构图

Figure 3. Transfer function of traditional PSS
图3. 传统PSS的传递函数框图

Figure 4. Transfer function of Fuzzy self-tuning wide-area PSS
图4. 模糊自整定广域PSS结构图

Figure 5. Membership function of fuzzy variables
图5. 模糊变量的隶属函数
控制规则是模糊控制器的核心。根据经验和知觉推理,将人的大量成功的控制策略经整理、加工提炼后,用输入、输出变量的模糊状态给以描述,就得到了控制规则。根据PID控制放大、积分和微分环节的不同作用,制定的模糊控制规则为:
1) 当偏差较大时,为了加快控制器的响应速度,一般KP取较大的值,此时一般略去微分和积分的环节,取较小的KI和KD值;
2) 当偏差较小时,如果此时偏差的变化率也很小,认为系统趋于稳定,此时取较小的KP,为了让系统更加稳定,取适中的KI和KD;
3) 如果此时偏差变化率较大,且二者符号相同时,认为系统正在加速偏离稳定水平,应取较大的KP值以及适中的KI和KD值;
4) 若二者符号相反,认为系统正在趋于稳定的过程,为了避免超调,一般取较小的KP和较大的KD。
根据上述控制规则,制定出的各个模糊变量的控制规则如表1。表1每格里有3个模糊控制规则,从左到右分别为KP、KI和KD的控制规则。

Table 1. Fuzzy inference rule of KP, KI, KD
表1. KP,KI,KD模糊推理规则
4. 算例分析
4.1. 两区四机系统算例
为验证所提方法的准确性与实用性,本文以两区四机系统为例,该系统共有11个节点,4台发电机,采用双回线运行时,负荷功率为分别为(967-j100) MW和(1767-j250) MW,通过潮流计算四台发电机的出力分别为700 MW,700 MW,719 MW和700 MW,区域间的传输功率为400 MW。其系统结构如图6,基本参数见文献 [12] 。
通过频域分析发现,该系统存在三种低频振荡模式,有1个区域振荡模态和2个局部振荡模态,如表2所示,其中区域模式阻尼比最小,严重影响联络线传输功率。
在不考虑随机性的情况下,在仿真0.5 s时系统8号节点受到一个小的干扰,发生接地短路故障,0.1 s后短路故障消除,此时系统将发生低频振荡,如果此时不采取有效措施,系统将逐步失去稳定,发电机1和发电机3间的功角的变化曲线如图7。
下面将从三个场景来验证所提广域电力系统稳定器的有效性。场景一:不考虑系统的随机性,在发电机G3处安装PSS;场景二:在场景一的基础上考虑系统的随机性,控制措施不变;场景三:考虑系统的随机性,安装本文所提的广域PSS,并采取模糊自整定PID控制措施。
场景一:广域PSS输入信号选取发电机G1和发电机G3的转速差ω13,PSS参数采用阻尼转矩分析法确定,具体参考文献 [13] 。设计结果具体为:在发电机3处安装PSS,各个参数分别为 ,
, ,
, ,放大倍数
,放大倍数 取5。通过系统仿真,此时发电机1和发电机3间的功角的变化曲线如图8。
取5。通过系统仿真,此时发电机1和发电机3间的功角的变化曲线如图8。
由图8可以看出,在不考虑随机性的情况下,广域PSS可以有效提高系统阻尼,低频振荡逐渐平息,系统将逐步恢复稳定。这表明在不考虑随机性的基础上,广域PSS可以有效提高系统稳定性。
在场景二:在上一场景中,引入随机性,假设发电节点中1、2为风机接入点,其他发电机为常规机组。为简化考虑,假设风机有功出力服从正态分布N (Pgen, 5% Pgen),其中Pgen为发电机基态有功值。常规机组出力保持恒定。另外,同样的道理假设系统中的负荷服从正态分布N (Pload, 5% Pload),其中Pload为负荷基态有功值 [14] [15] 。广域PSS安装位置及其设计参数不变,对上述系统采用仿真,此时发电机1和发电机3间的功角的变化曲线如图9。
由图9可以看出,考虑系统随机性的影响情况下,采用广域PSS控制且不改变控制参数时,发电机1和发电机3之间的功角依然震荡,不能及时的平息低频振荡,因此可以认为在考虑随机性的情况下,基于确定性场景计算得到的广域PSS不能有效提高系统阻尼。
场景三:在广域PSS的基础上添加模糊自整定PID控制,阻尼比保持在合理的范围之内,此时发电机1和发电机3间的功角的变化曲线如图10,系统低频振荡逐渐平息。
Table 2. Mode of system
表2. 系统存在的模态

Figure 6. The network of 2A4G
图6. 两区四机系统网络图

Figure 7. Simulation diagram of 2A4G
图7. 两区四机仿真图

Figure 8. Simulation diagram of 2A4G without randomness
图8. 不计随机性功角图

Figure 9. Simulation diagram of 2A4G with randomness
图9. 计及随机性原控制功角图

Figure 10. Power angle of LFO after real time correction control considering randomness
图10. 计及随机性的实时修正控制功角图
4.2. 某地区电网算例
以某地区电网进行仿真,该地区电网模型中含有发电机64台,节点294个和线路共计628条。通过频域分析发现,该系统存在63个低频振荡模式,由运行经验可知,其中FJ模态对系统影响较为严重,通过模式辨识,可以确定FJ模态的频率为0.53 Hz。
通过计算FJ模态的左右特征向量,可以得出该模态的相关发电机分别为B23和B45。在0.5 s时在节点Jp12处施加一个扰动,系统发生模式为FJ的低频振荡,系统仿真结果如图11。
图11的曲线分别为三种情况下节点B23和B45处发电机间的功角差,仿真时间为20 s。从图11可以看到,该系统在受到干扰后发生了模式为FJ的低频振荡,在考虑负荷以及风机的随机性的情况下,如果不采取控制措施,系统振荡很快发散,危害系统的安全运行;如果采取常规的确定性控制措施,系统发散的速度减缓,但仍然不能有效的抑制该模态;通过采取自整定PID控制,低频振荡逐渐平息,系统很快进入到稳定状态,符合预期的效果。
综上可知,在确定性的前提下,原有的PSS设计能及时抑制电力系统的低频振荡,但在实际应用中,考虑系统随机性的情况下,原有控制失效了,这种情况下采取自整定PID控制,能够及时平息系统的低频振荡,验证了所提出措施的有效性。
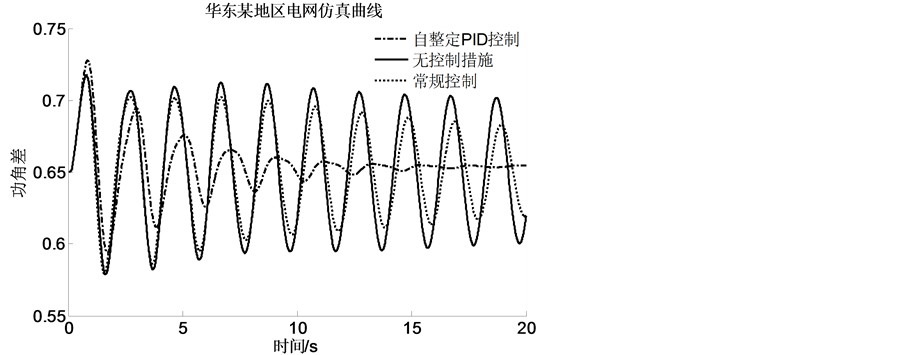
Figure 11. Power Grid Simulation of a certain region in East China
图11. 某地区电网仿真图
4. 结语
本文在分析PID控制原理和特点的基础上,提出了模糊自整定PID控制及控制方法。基于PSS抑制低频振荡的原理上,综合模糊控制方法,计及电网随机性的情况下,确定了模糊隶属函数和模糊规则,对控制措施进行了具体化。最后通过两区四机系统以及华东地区电网进行了仿真,测试了广域PSS控制器以及控制措施的性能。仿真结果表明,这种控制器能有效适应电网的随机性,改善电力系统的阻尼,提高互联电网的稳定性。
基金项目
国家自然科学基金(51277029)。
文章引用
宗鹏鹏,吴健超,杨钦臣,闫济红,王培秀. 基于模糊自整定PID的广域电力系统稳定器设计
Design of Wide Area Power System Stabilizer Based on Fuzzy Adaptive PID[J]. 输配电工程与技术, 2016, 05(03): 24-32. http://dx.doi.org/10.12677/TDET.2016.53004
参考文献 (References)
- 1. 宋墩文, 杨学涛, 丁巧林, 马世英, 李柏青, 王青. 大规模互联电网低频振荡分析与控制方法综述[J]. 电网技术, 2011, 35(10): 22-28.
- 2. 和萍, 文福拴, 薛禹胜, Ledwich GERARD, 吴丹岳, 林因. 风电场并网对互联系统小干扰稳定及低频振荡特性的影响[J]. 电力系统自动化 ,2014, 38(22): 1-10.
- 3. 杨晓静, 赵书强, 马燕峰. 采用广域测量信号的PSS参数优化设计[J]. 电力自动化设备, 2006, 26(3): 47-50.
- 4. 谢志棠, 宗秀红, 钟志勇, 王克文, 张建芬. 计及FACTS装置的概率特征根分析[J]. 电力自动化设备, 2004, 24(8): 13-17.
- 5. Rueda, J.L. and Colome, D.G. (2009) Probabilistic Performance Indexes for Small Signal Stability Enhancement in Weak Wind-Hydro-Thermal Power Systems. IET Generation Transmission and Distribution, 3, 733-747. http://dx.doi.org/10.1049/iet-gtd.2008.0574
- 6. Krause, G. (2011) From Turbine to Wind Farms—Technical Requirements and Spin-Off Products. Technical Requirements InTech, India.
- 7. 周明, 元博, 张小平, 李庚银. 基于SDE的含风电电力系统随机小干扰稳定分析[J]. 中国电机工程学报, 2014(10): 1575-1582.
- 8. 王克文, 谢志棠, 史述红, 杨宛辉. 基于概率特征根分析的电力系统稳定器参数设计[J]. 电力系统自动化, 2001, 25(11): 20-23.
- 9. 赵延东, 于锡纯. 模糊PID控制器的稳定性分析[J]. 控制与决策, 2002, 17(5): 631-634.
- 10. 王涛, 王爱国. SVC对电力系统稳定性的模糊控制[J]. 基础自动化, 1999(2): 28-31.
- 11. 王述彦, 师宇, 冯忠绪. 基于模糊PID控制器的控制方法研究[J]. 机械科学与技术, 2011, 30(1): 166-172.
- 12. 陈中, 杜文娟, 王海风, 等. 基于阻尼转矩分析法的储能系统抑制系统低频振荡[J]. 电力系统自动化, 2009, 33(12): 8-11.
- 13. 陈中, 胡吕龙. 基于阻尼转矩分析法的广域阻尼控制器设计[J]. 电力系统保护与控制, 2013(7): 36-40.
- 14. 张忠会, 谢义苗, 何乐彰. 考虑风机出力随机性的电网静态安全风险评估[J]. 水力发电, 2014(12): 83-85, 89.
- 15. 李武强. 考虑随机性的微电网优化运行研究[D]: [硕士学位论文]. 成都: 西南交通大学, 2014.