Modeling and Simulation
Vol.07 No.02(2018), Article ID:24945,8
pages
10.12677/MOS.2018.72006
Research on Bionic Drag Reduction of Flexible Surface Based on Bi-Directional Fluid Solid Coupling
Luting Hao, Zhong Xu
School of Mechanical Engineering, Dalian University of Technology, Dalian Liaoning
![]()
Received: May 1st, 2018; accepted: May 13th, 2018; published: May 18th, 2018

ABSTRACT
With the development of science and technology, the concept of low carbon and environmental protection has been deeply rooted among the people. The problem of drag reduction is very important for the energy consumption of mechanical transportation. In this paper, the epidermis of a dolphin is used as a biological prototype, and the structural features of the dermis ridge of the epidermis are extracted as: research on the drag reduction effect of flexible polyurethane elastomer at different velocities. With WORKBENCH as the background, a turbulent model of Transition SST is used to simulate the bi-directional fluid solid coupling for surface of flexible polyurethane elastomer flat. The simulation results show that compared with rigid plate, the flexible polyurethane elastomer plate has drag reduction effect in the flow rate range of 3 - 20 m/s, and when the flow rate is higher than 10 m/s, the drag reduction rate can reach more than 10%. The polyurethane elastomer plate greatly shortens the section of the larger shear stress, which reduces the friction resistance of the flexible polyurethane elastomer.
Keywords:Drag Reduction, Flexible, Bi-Directional Fluid Solid Coupling
基于双向流固耦合的柔性表面仿生减阻研究
郝路亭,徐中
大连理工大学机械工程学院,辽宁 大连
![]()
收稿日期:2018年5月1日;录用日期:2018年5月13日;发布日期:2018年5月18日

摘 要
随着科学技术的发展,低碳环保的理念已深入人心,减阻问题对于机械交通工具的能源消耗具有非常重要的意义。本文以海豚表皮为生物原型,将海豚表皮的真皮嵴结构特征提取为:不同流速下,研究柔性聚氨酯弹性体的减阻效果。以Workbench为背景,采用Transition SST的湍流模型,对柔性聚氨酯弹性体平板表面进行双向流固耦合算法的仿真计算。仿真结果表明:与刚性平板相比,柔性聚氨酯弹性体平板在3~20 m/s的流速范围内均具有减阻效果,且流速高于10 m/s时,减阻率可达到10%以上;聚氨酯弹性体平板极大地缩短了较大的剪切应力段,从而降低了柔性聚氨酯弹性体表面的摩擦阻力。
关键词 :减阻,柔性,双向流固耦合

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在航海与航空领域,减阻问题已成为其亟待解决的问题之一。船舶在低速航行时,摩擦阻力约占总阻力的70%~80%,在高速航行时,约占40%~50%。按边界层中与流体介质接触表面的弹性大小,减阻技术可分为刚性表面减阻技术和柔性表面减阻技术。刚性表面减阻技术的特点是与流体介质接触的表面具有一定的形状,且随流体介质的加入形状基本不发生变化,常见的主要有沟槽法 [1] ,低表面能法 [2] 。而柔性表面减阻技术的特点是与流体介质接触的表面是柔性的,且具有较小的弹性模量和较大的形变能力。除了有减阻作用,柔性表面还具有降噪的效果,且不需要额外的能量输入等优点,对能源消耗的减少具有很重要的意义。
自1960年Kramer [3] 的柔顺壁减阻实验获得60%的减阻效果以来,仿生柔顺壁减阻引起了许多科学家的兴趣。根据文献 [4] ,柔性材料作为减阻材料,应满足剪切模量与水动压力同量级、密度与水接近、较小的阻尼以及较好的防水性的条件,因此,本文选择聚氨酯弹性体作为仿真对象。
本文以海豚表皮为生物原型,将海豚表皮的真皮嵴结构形状特征提取为:不同雷诺数流场条件下,以聚氨酯弹性体为材料原型,研究其在相对较广的速度域流场内的减阻效果。与此同时,为智能化仿生减阻的探究奠定基础。
2. 模型建立
ANSYS的双向流固耦合是一种隐式耦合算法。这种算法不同于其他软件的显式算法。因为耦合算法时间步长可以取的很大,软件会通过耦合时间步内的交错循环来保证每个时间步都是真实的收敛解;而显式耦合算法耦合时间步长要求很小才行,耦合时间步长太大会不收敛,另外每个耦合时间步内没有交错循环,所以在任何情况下,每个耦合时间步内只计算一次就进行到下一个耦合计算时间步计算,如果时间步长不是足够的小,可能会导致非定常计算结果的不真实。因此,本文选择双向流固耦合算法。
本文在耦合计算中采用流场先行的计算顺序、压力基-瞬态分离求解的方式,即先求解流场控制方程,得到流场的载荷作用力,再将这个结果代入动力耦合边界条件并联立结构计算基本控制方程对固体部分进行求解,求解完成后得到结构形变或位移,再将这个结果代入网格运动方程并对流场网格进行更新,更新完成后再进行流场控制方程的求解,如此反复直到收敛。仿真计算以ANSYS Workbench作为计算背景,流场计算采用Fluent,结构计算采用Mechanical,两者之间的数据通过System Coupling进行双向流固耦合分析。
2.1. 流场运动基本控制方程
考虑到基于Naiver-Stokes方程的直接数值模拟(DNS, Direct Numerical Simulation)计算量太大,本文采用Transition SST四方程数值模拟方法,该方法是基于SST k-ω模型开发的,额外添加了两个用于求解转捩过程的方程,有计算周期短,计算要求较低的优点 [5] 。取20℃水作为流体介质,将其视作不可压缩的粘性流体,且必须满足的基本定律:质量守恒定律、动量守恒定律、能量守恒定律(热力学第一定律) [6] 。控制方程如下:
任何流动问题都必须满足质量守恒定律。定律可表述为:单位时间内流体微元体中质量的增加等于同一时间间隔内流入该微元体的净质量。按照这一定律,可以得出质量守恒方程或连续性方程,即
(1)
引入矢量符号 ,则式(1)写成:
(2)
其中,ρ是密度,t是时间,u、v和w是速度矢量u在x、y和z方向上的分量。
动量守恒定律也是任何流动系统都必须满足的基本定律。该定律可表述为:微元体流体的动量对时间的变化率等于外界作用在该微元体上的各种力之和。该定律实际上牛顿第二定律。按照这一定律,可导出x、y和z三个方向的动量守恒方程,即
(3)
(4)
(5)
式中,p是流体微元体上的瞬时压强,τxx、τxy和τxz等是因分子粘性作用而产生的作用在微元体表面上的粘性应力的分量,fx、fy和fz分别表示x、y和z三个方向的单位质量力,单位为m/s2。
能量守恒定律是包含有热交换的流动系统必须满足的基本定律。该定律可表述为微元体中能量的增加率等于进入微元体的净热流量加上体力与面力对微元体所做的功。该定律实际是热力学第一定律。利用利用内能i与温度T、比热容cp关系式i = cpT,得出以温度T为变量的能量守恒方程,即
(6)
其中,cp是比热容,T为温度,k为流体的传热系数,ST为流体的内热源及由于粘性作用流体机械能转换为热能的部分,有时简称ST为粘性耗散项。
2.2. 湍流控制方程
湍流模型中,SST k-ω模型 [7] 综合了k-ω模型在近壁区计算和k-ε在远场独立性计算的优点。其湍动能k和比耗散率ω的输运方程以张量的形式表达,即
(7)
(8)
其中,Gk和Gω分别表示湍动能和比耗散率的速度梯度,Γk和Γω分别表示湍动能和比耗散率的有效扩散系数,Yk和Yω分别表示关于湍动能和比耗散率的湍流扩散项,ρ为流体介质密度。
2.3. 转捩模型控制方程
关于间歇因子γ的输运方程 [8] ,即
(9)
关于动量厚度雷诺数 的输运方程 [8] ,即
(10)
2.4. 模型建立与主要参数设计
本文采用ANSYS Workbench 18.0进行数值模拟计算。固体域和流体域的尺寸参数根据计算需要及临界雷诺数等进行设定,固体域取为0.2 × 0.01 × 0.003 m,流体域取0.5 × 0.01 × 0.06 m。速度入口距离聚氨酯弹性体前端0.15 m,近壁区网格需要进行加密处理,流体域网格数约为100万。并且在流固耦合面处,流体域和固体域的网格节点一一对应,模型建立与网格划分如图1和图2所示。
在数值模拟中,流体域采用速度入口和自由出口的边界条件,其余均设置为壁面边界,流体域与固体域交界面为流固耦合面,且流固耦合面和侧面均设置为动网格属性。固体域中,取与流体域想接触的面为流固耦合面,其所对的下底面为固定壁面。为保证仿真结果的收敛性,设定模拟总时间为1.8 s,时间步长为0.01 s。
在流体域设置中,流体介质采用20℃的水,密度ρ = 998.2 kg/m3,动力黏度系数γ = 1.005 × 10−3 Pa·s,入口速度取3 m/s、5 m/s、8 m/s、10 m/s、12 m/s、15 m/s、18 m/s、20 m/s。入口速度初始值选定v = 3 m/s,平板长度L = 0.2 m,此时平板的雷诺数ReL = vL/γ = 5.96 × 105。
2.5. 仿真计算的可行性验证
为保证仿真计算的准确性,将刚性材料结构钢作为参考对象,结构钢与聚氨酯弹性体的材料参数如表1所示。
刚性平板的理论摩擦阻力系数Cf参考休斯公式 [9] ,即
(11)
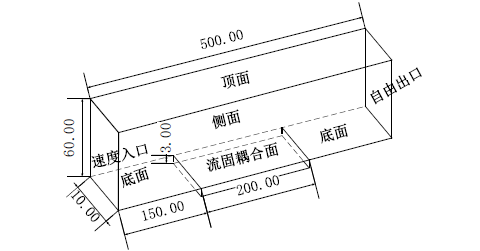
Figure 1. Model establishment (unit: mm)
图1. 模型建立(单位:mm)
 (a) (b)
(a) (b)
Figure 2. (a) Meshing of fluid domain; (b) Meshing of solid domain
图2. (a) 流体域网格划分;(b) 固体域网格划分

Table 1. Material parameters of structural steel and polyurethane elastomer
表1. 结构钢与聚氨酯弹性体的材料参数
摩擦阻力通过式(12)求解,即
(12)
其中,ρ = 998.2 kg/m3,为流体介质在20℃的密度,v为水流速度,S为流固耦合面的面积,且S = 0.2 × 0.01 = 0.002 m2。
刚性平板理论摩擦阻力与结构钢仿真摩擦阻力对比如表2所示。
相对误差均在5%以内,可视为在误差允许范围以内,因此该仿真方式可取,聚氨酯弹性体的仿真也采用此方式。
3. 仿真计算与结果分析
为表明聚氨酯弹性体的减阻效果,用减阻率η来表征,即
(13)
其中,Fs表示结构钢平板的仿真摩擦阻力,Fr表示聚氨酯弹性体平板的仿真摩擦阻力。
通过仿真计算,水流速度分别在3 m/s、5 m/s、8 m/s、10 m/s、12 m/s、15 m/s、18 m/s、20 m/s时,结构钢平板与聚氨酯弹性体平板的仿真摩擦阻力以及聚氨酯弹性体平板的减阻率如表3所示。为了更清晰地表现出减阻效果,减阻率随流速变化如图3所示。
综合表3和图3可以看出,流速在3~20 m/s时,均具有减阻效果,且在高速流场(高于10 m/s的流速)减阻效果较好,流速在8 m/s左右时,减阻效果相对较差。
Table 2. Comparison of theoretical and simulation friction resistance
表2. 理论摩擦阻力与仿真摩擦阻力的对比
Table 3. Drag reduction effect of structural steel plate and polyurethane elastomer plate at different velocity
表3. 不同流速下结构钢平板与聚氨酯弹性体平板的减阻效果
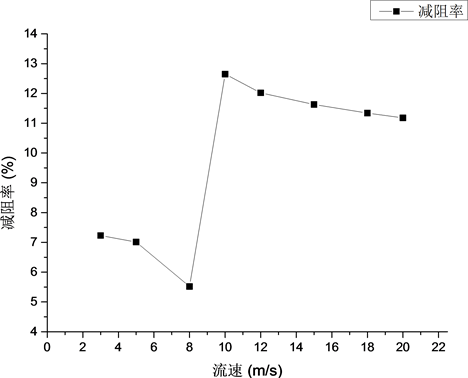
Figure 3. The change of drag reduction with velocity
图3. 减阻率随流速变化
 (a) (b)
(a) (b)
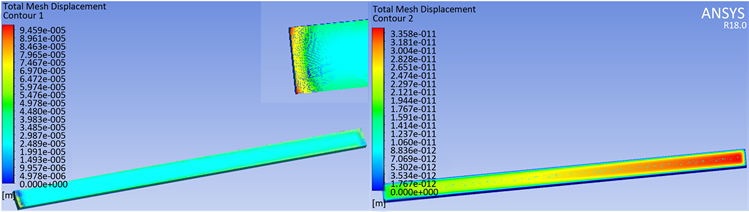
Figure 4. Total displacement contour of polyurethane elastomer plate and structural steel plate; (a) Total displacement contour of polyurethane elastomer plate; (b) Total displacement contour of structural steel plate
图4. 聚氨酯弹性体平板与结构钢平板的总位移云图;(a) 聚氨酯弹性体平板的总位移云图;(b) 结构钢平板的总位移云图
 (a) (b)
(a) (b)
Figure 5. Shear stress contour of polyurethane elastomer plate and structural steel plate; (a) Shear stress contour of polyurethane elastomer plate; (b) Shear stress contour of structural steel plate
图5. 聚氨酯弹性体平板与结构钢平板的剪切应力云图;(a) 聚氨酯弹性体平板的剪切应力云图;(b) 结构钢平板的剪切应力云图
如图4所示,在t = 1.8 s,v = 10 m/s时,结构钢平板和聚氨酯弹性体平板对应的总位移云图。从总位移云图可以看出,聚氨酯弹性体平板发生较大位移变化主要在平板的前端和尾端。
如图5所示,在v = 10 m/s时,聚氨酯弹性体平板和结构钢平板对应的剪切应力云图。从剪切应力云图可以看出,两者的较大剪切应力均发生在流固耦合面的最前端,且前者的剪切应力较大段明显短于后者。由于剪切应力正比于切应力速度,因此也验证了聚氨酯弹性体平板相对于结构钢平板确实有减阻效果。
4. 结论
1) 相比于结构钢平板,聚氨酯弹性体平板在3~20 m/s均具有减阻效果,且在高速流场中,减阻效果较好,在流速为8 m/s左右,减阻效果相对较差。
2) 在数值模拟中,聚氨酯弹性体平板和结构钢平板对应的流场域中,较大剪切应力均发生在流固耦合面的最前端,且前者的剪切应力较大段明显短于后者,即聚氨酯弹性体平板极大地缩短了较大的剪切应力段,从而降低了柔性聚氨酯弹性体表面的摩擦阻力。
致谢
本文是在我的导师徐中老师的指导下完成,感谢徐老师的悉心教导,同时也感谢专注CFD的胡坤老师热心分享的学习视频、博客以及ANSYS公司郭晓东先生的讲座和后期解答。在此之前我并未涉足仿生减阻领域,通过多方面的学习以及这些帮助,我对仿生减阻有了深刻的理解。
文章引用
郝路亭,徐 中. 基于双向流固耦合的柔性表面仿生减阻研究
Research on Bionic Drag Reduction of Flexible Surface Based on Bi-Directional Fluid Solid Coupling[J]. 建模与仿真, 2018, 07(02): 39-46. https://doi.org/10.12677/MOS.2018.72006
参考文献
- 1. Walsh, M.J. (1990) Riblets Viscous Drag Reduction in Boundary Layers. NASA Technical Report, Virginia.
- 2. 禹营, 汪家道, 陈大融. 超疏水表面在减阻中的应用[J]. 哈尔滨工业大学学报, 2006, 38: 68-70.
- 3. Kramer, M.O. (1960) Boundary Layer Stabilization by Distributed Damping. Naval Engineers Journal, 72, 25-34. https://doi.org/10.1111/j.1559-3584.1960.tb02356.x
- 4. 高军, 谷云庆, 牟介刚, 等. 柔性表面减阻技术研究进展[J]. 化工新型材料, 2013, 43(9): 15-20.
- 5. 雷娟棉, 谭朝明. 基于Transition SST模型的高雷诺数圆柱绕流数值模拟[J]. 北京航空航天大学学报, 2017, 43(2): 207-217.
- 6. Versteeg, H.K. and Malalasekera, W. (1995) An Introduction to Computation Fluid Dynamics: The Finite Volume Method. Wiley, New York.
- 7. Menter, F.R. (1994) Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA Journal, 32, 1958-1605. https://doi.org/10.2514/3.12149
- 8. Menter, F.R., Langtry, R. and Vliker, S. (2005) Transition Modeling for General CFD Applications in Aeronautics. 43rd AIAA Aerospace Sciences Meeting and Exhibition, Reno, Nevada, 10-13 January 2005. https://doi.org/10.2514/6.2005-522
- 9. 盛振邦. 船舶原理(上册) [M]. 上海: 上海交通大学出版社, 2003: 160-184.