Journal of Antennas
Vol.
09
No.
02
(
2020
), Article ID:
35883
,
11
pages
10.12677/JA.2020.92003
Compressed Sensing 2-D DOA Estimation for the Uniform Circular Array
Xiaoyou Yu*, Yalin Jiang, Miao Yu, Qi Yang
College of Information Science and Engineering, Hunan University, Changsha Hunan

Received: May 10th, 2020; accepted: May 25th, 2020; published: Jun. 1st, 2020

ABSTRACT
Combining the particularity of the uniform circular array structure, this paper proposes a 2-D DOA estimation method based on CS theory. This method first uses the pattern space transformation to convert the uniform circular array of array element space into the virtual linear array of pattern space; secondly, the SVD processing is used to reduce the dimension to obtain a low-dimensional data matrix; finally, utilizes the OMP algorithm to solve the problem to obtain the 2-D angle estimation value. Theoretical derivation and experimental simulations show that this method does not require spectral peak search and has a small amount of calculation. It also has good estimation performance for two-dimensional coherent and non-coherent signals. Compared with the classic algorithm, this method also has certain advantages for 2-D DOA estimation under different conditions.
Keywords:Uniform Circular Array Structure, Compressed Sensing (CS), Pattern Space Transformation, Singular Value Decomposition (SVD), Orthogonal Matching Pursuit (OMP)

均匀圆形阵列天线的压缩 感知二维DOA估计方法
余小游*,蒋娅林,余苗,杨琦
湖南大学信息科学与工程学院,湖南 长沙

收稿日期:2020年5月10日;录用日期:2020年5月25日;发布日期:2020年6月1日

摘 要
结合均匀圆型阵列结构的特殊性,论文提出了一种基于压缩感知的二维波达方向估计方法。该方法首先利用模式空间转换将阵元空间的均匀圆阵转换成模式空间的虚拟线阵;其次采用奇异值分解的方法进行降维,得到低维数据矩阵;最后借助正交匹配追踪算法进行求解,获得二维角度估计值。通过理论推导和实验仿真表明该方法无须谱峰搜索,计算量较小,对于二维相干信号和非相干信号也都具有良好的估计性能。相比于经典算法,对于不同条件下的二维DOA估计该方法也具有一定的优越性。
关键词 :均匀圆型阵列,压缩感知,模式空间转换,奇异值分解,正交匹配追踪

Copyright © 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
阵列信号波达方向估计(Direction of Arrival, DOA) [1] 侧重于对感兴趣的空域信号进行处理计算,以实现信号参数的准确估计,从而定位信号源的位置。根据估计参数的个数不同,波达方向估计分为单参数估计和多参数估计。单参数估计指的是阵元位于同一个平面内,属于一维参数估计。实际上,大多信号位于立体空间,解决的是方位角与俯仰角的联合估计 [2]、频率和角度联合估计 [3]、时延和角度联合估计 [4]、极化参数和角度联合估计 [5] 等二维参数问题。其中,二维DOA估计是对三维空间的俯仰角和方位角进行估计,能够充分表示出信号的空间特征,而非平面特征,相比之下难度也会增加。因此,研究二维阵列信号波达方向角估计更具有实际意义。
目前大多二维DOA估计都是基于L型阵列结构 [6],即由两个相互垂直的均匀线性阵列(Uniform Linear Array, ULA)组成。空间谱估计算法可以利用L型阵列的特殊性,将二维DOA角度解耦并转变为两个一维DOA估计的问题。与此同时,均匀线阵的阵列结构符合范德蒙(Vandermonde)矩阵的特点,可以直接运用很多优良的一维DOA估计算法进行求解。所以L型阵列的二维角估计值相对来说更易得到。而今基于均匀圆阵的研究较少,原因是其阵列流形不符合范德蒙结构。但均匀圆阵具有圆对称性,能同时对方位角和俯仰角进行估计,覆盖了360˚全方位角度信息,更符合实际应用。针对此,文献 [7] [8] [9] 所提的模式转换,将均匀圆阵转换为虚拟线阵,转换后的阵列流形类似于均匀线阵,符合范德蒙结构,所以适用于均匀线阵的算法也可以应用于均匀圆阵。虽然解决了阵列流型矩阵的基本形式问题,但现下基于圆阵的二维估计方法大多都是波束形成算法和子空间分解算法,压缩感知(Compressive Sensing, CS) [10] 类算法甚少。事实上,对比于传统算法,压缩感知和稀疏表示理论 [11] 为波达方向估计提供了一种崭新的思路。该理论表示,若信号能表示出稀疏特性,就能运用重构算法恢复原始信号。而信号数通常都是有限的,采用某种空间划分方法就能满足稀疏条件,而且无需任何预处理即可对相干信源实现估计 [12]。
鉴于此,论文提出了一种均匀圆阵下基于压缩感知的二维DOA估计算法。该算法首先利用模式空间转换将阵元空间的均匀圆阵转换成模式空间的虚拟线阵,该线阵与普通线阵一样,符合范德蒙矩阵结构;再基于阵列流型矩阵的形式构造稀疏表示基矩阵,以此建立DOA估计模型;为降低运算量,论文将阵列接收数据列数采用奇异值分解的方法进行降维,得到低维的信号子空间;最后利用OMP算法求解空间目标的角度参数。理论分析和实验仿真结果表明,相比于其他算法,论文提出的二维DOA估计算法计算量小,相干情况下也无须进行平滑处理即可求解,不同条件下的二维DOA估计也都具有较好的估计效果。
2. 压缩感知理论
压缩感知理论是一种新兴的基于信号稀疏的观测理论,其基本处理过程如图1所示。首先将原始信号经过稀疏变换使其非零元素甚少,显示稀疏特性;再通过合适的测量矩阵得到低维数据矩阵以完成压缩采样,尽管降维后的数据不是信号本身,但却包含其所有信息,大大节省了存储和传输成本。而信号的稀疏特性,使得借助稀疏重构算法能实现信号的重构。接下来着重阐述下压缩感知的数学模型。

Figure 1. Compressed sensing process
图1. 压缩感知处理过程
假定空域存在一个有限长离散 的原始信号 ,和一个由N个 维基向量 ( )构成的 维基矩阵 ,在 投影下, 为:
(1)
式中, 是 的系数向量,且 中仅有K个非零元素,因此, 满足一定的稀疏性,也即具有可压缩性。当使用满足要求的测量矩阵 对 进行测量,且 与 独立不相关,可得 的观测数据向量。
(2)
式中, 表示观测数据向量,由于 ,式(2) 形成的方程组有无穷多个解,如果直接求解,很难从 中恢复出 。将式(1) 代入式(2) 中,可以得到:
(3)
式中, 称为感知矩阵(Sensing Matrix),为 和 相乘所得。由式(3) 可知, 是由 在 上投影得到的,则利用重构算法通过 可以恢复出 ,进而获得 。文献 [13] 提出:当 满足稀疏性, 满足任意2K列非线性相关时,则式(3) 可以通过求解 范数最小化问题精确重构:
(4)
式(4)是一个NP-hard问题, 求解该式很困难。但文献 [14] 指出:在一定条件下, 范数和 范数等价。即式(4)可转为 优化问题求解:
(5)
当信号含有加性高斯白噪声 时,式(3)重写为:
(6)
式中, 为 维噪声矢量。对式(5)中 估计的优化模型为:
(7)
式中, 是与噪声有关的常量,通常为一很小的常量。
3. 基于压缩感知的二维DOA估计
3.1. 阵列结构和信号模型
阵列信号波达方向估计侧重于通过对感兴趣的空域信号进行处理计算,实现对信号参数的准确估计,从而获得信号源的位置信息。一般来说,整个估计过程分为三部分 [1]:目标空间、观察空间和估计空间,如图2所示。
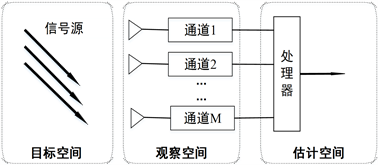
Figure 2. The spatial spectrum estimation process
图2. 空间谱估计过程
目标空间是由复杂环境和信号源参数组成,也就是我们通过特定的算法对信号参数进行估计的目的;观察空间主要由天线阵元和多个通道组成,其目的是接收目标空间发射过来的信号,环境的复杂性使得其信号信息可能包括噪声干扰信息;估计空间是利用相关的估计算法对信号的各参数进行计算。重构性能的好坏与很多因素有关,比如阵元间的互耦、通道之间的不一致性等。为了利于研究,通常假设:
1) 目标信号为远场窄带信号,阵列接收到的信号可视为平面波;
2) 天线阵列为全向天线,入射平面波的波长远,接收阵列阵元间距大于其几何尺寸,且各个阵元间的相互影响可忽略不计;
3) 信号在信道中的传输介质均匀、线性、同向性及非扩散的。
论文采用如图3所示的均匀圆形阵列接收信号,半径为r,均匀分布M个阵元,并以圆阵天线的圆心作为参考点。
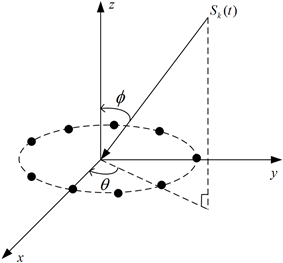
Figure 3. The uniform circular array structure
图3. 均匀圆形阵列结构
假设有K个远场窄带信号源 ,,分别由方向 入射到阵列上,其中方位角 定义为第k个入射信号在xoy平面投影与坐标系x轴的夹角: ;俯仰角 定义为第k个入射信号与坐标系z轴的夹角: ,则t时刻第m个阵元接收到的单快拍信号为:
(8)
式中, , 表示各阵元上的高斯白噪声, 表示第k个信号的导向矢量,即:
(9)
则t时刻,M个阵元接收的信号可表示为:
(10)
式中, 为阵元接收的 维数据矢量,信号源 ,阵列导向矢量矩阵 。为简便起见,式(9)改写为:
(11)
式中, ,,, 为载波波长。
假设采样数为L,即考虑多快拍数模型下,阵列的接收数据的矢量 为: ,空域信号源矢量变为: ,对应地,噪声矢量为: 。因此,接收端阵列接收到的数据矢量表达式如下:
(12)
3.2. 模式空间转换
均匀圆阵的天线模型有着巨大的优势,但其阵列流型矩阵却不符合Vandermonde结构,限制了很多优良算法的直接应用。由此,运用文献 [7] [8] [9] 所提的模式空间转换。
假设全阵元互不相耦,构造加权矩阵:
(13)
式中, ,h表示模式数。相应的模式空间阵列流形为:
(14)
式中, 表示第i阶相位模式, 表示第i阶第一类贝塞尔函数。式(14)的第一项为主项,其他项为残余项。文献 [7] 证明:当 时, 的模值可以忽略。因此,当满足 时,即阵元间距小于 的均匀圆阵,残余项可以忽略,即:
(15)
有:
(16)
则阵列输出信号变换为:
(17)
其中,
(18)
显然,此时的阵列流型矩阵满足Vandermonde结构, ,可以直接运用一维DOA估计算法进行求解。
3.3. SVD处理方法
对于实际情况,接收到的信号可能含有大量快拍数L,可能会造成计算量过高。由此论文将接收到的信号进行奇异值分解(Singular Value Decomposition, SVD),得到信号子空间和噪声子空间 [15],将高维接收信号矩阵映射到低维子空间,以减少计算量。即:
(19)
式中, ,h表示模式数。相应的模式空间阵列流形为:
(20)
式中, , 为 维单位矩阵, 为 维零矩阵。由于右乘矩阵为矩阵初等列变换,故 与 具有相同的稀疏特征,且 包含了信号大部分的能量。式(20)中无论信号源是否相干,大奇异值对应的奇异矢量都是各信号源阵列导向矢量的一个线性组合,从上述分析可知SVD分解本质是一个信号分量累积的过程,使得在低信噪比条件下能够进行信号处理。对比式(12)和式(20)可知,接收数据矩阵 由 维降至 维,对于实际情况,快拍数L很大,而信源数目K通常很小,即有: ,因此求解式(20)显著降低了运算量。下面对式(20)所示的降维CS信号模型进行优化求解。
3.4. 稀疏信号求解
由CS理论可知,信号满足稀疏特性,则可借助稀疏分解求解原始信号。论文采用正交匹配追踪算法 [16] 进行求解,进而根据非零元素的位置得到信源对应的方位角估计值。再根据式(16)反推得到俯仰角估计值。
综合以上分析,该算法的基本实现步骤如表1:

Table 1. 2-D DOA estimation algorithm steps
表1. 二维DOA估计算法步骤
4. 实验仿真与分析
实验仿真环境:1) 硬件:PC机(CPU Intel(R) Pentium CPU G630 @2.70 GHZ;主频2.70 GHZ;内存2 GB);2) 软件:MATLAB R2016b版本。
仿真1:验证算法的角度估计。假设有两个远场非相干信号源分别从 和 方向入射到阵列中,其中,天线阵为均匀圆阵,阵元数 ,最大模式数 ,快拍数 ,信噪比 ;图4分别以立体图和扇形图的形式显示了论文算法和信号源真实情况下的二维DOA值。
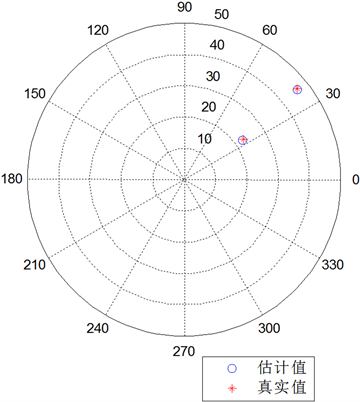
Figure 4. Two-dimensional DOA estimation of two signal sources
图4. 两个信号源的二维DOA估计
从图4可以看出,论文所提算法对两个信号源的方位角和俯仰角均能得到较高精度的估计结果,其二维估计值分别为 和 。显然,估计值和真实值基本重合,均方根误差在在1˚以内,但同时都有一定的误差。
为进一步分析该算法的DOA估计性能,下面采用与仿真1相同的阵列参数,通过蒙特卡洛仿真进行实验,统计算法的成功概率和均方根误差以分析其性能,并与现有的经典算法(UCA-ESPRIT, UCA-MUSIC)进行比较。
仿真 2:评估各算法角度估计的成功概率。定义成功估计概率p为:
(21)
式中, 为Monte Carlo实验总次数, 为成功实验次数。论文认为二维DOA估计值与真实值之差在1˚以内认为估计成功,在−10 dB到20 dB信噪比条件下进行各算法的成功概率比较,结果如图5所示。经典算法在低信噪比(SNR < −5 dB)情况下,几乎不能估计,而论文所提算法相对可行。信噪比−5 dB以后,各算法的成功概率逐渐增大。直至SNR = 12 dB,各算法都能保证准确估计出信号的角度值。也进一步体现压缩感知类算法对低信噪比估计的优越性。

Figure 5. Comparison of the success probabilities of several algorithms under different SNR
图5. 不同信噪比下各算法的成功概率比较
仿真3:评估各算法的角度估计精度。由图5可知,经典算法不适用于低信噪比估计,因而论文对信噪比在−5 dB到15 dB条件下进行各算法的均方根误差比较,定义二维DOA估计的RMSE为:
(22)
那么,在二维联合估计中,二维角度的总均方根误差表示为:
(23)
式中,N为Monte Carlo实验次数,K为信号源数目, 、 分别为第n次Monte Carlo实验估计的第k个信号源方位角的估计值和真实值, 、 分别为第n次Monte Carlo实验估计的第k个信号源俯仰角的估计值和真实值。结果如图6所示。
从图6可以看出,随着信噪比的提高,UCA-ESPRIT、UCA-MUSIC以及论文所提算法的RMSE均随之减小,但UCA-MUSIC算法相对下降得较缓慢,换言之,二维MUSIC算法需要较高的信噪比去实现二维DOA的准确估计。而论文所提算法在低信噪比下,相比其它算法,有更好的分辨率。
仿真4:评估所提算法的相干性能。经典的二维ESPRIT算法和二维MUSIC算法都不能直接对相干信号进行估计,都需要对算法进行一定的处理。而论文所提算法基于压缩感知稀疏理论,对相干信号同样具有优越的性能。故对论文所提算法进行二维相干估计的RMSE-SNR仿真实验,信噪比SNR:−10~20 dB,结果如图7可见,信噪比越高算法估计性能越高,即以较高概率实现精确的角度估计需要较高的信噪比。信噪比SNR < 12 dB之前,论文所提算法的均方根误差逐渐降低,信噪比12 dB以后,论文所提算法的RMSE基本保持不变。
5. 结论
将压缩感知理论应用于二维DOA估计中,可以用较少的快拍数达到较高的精度,而且无需任何预处
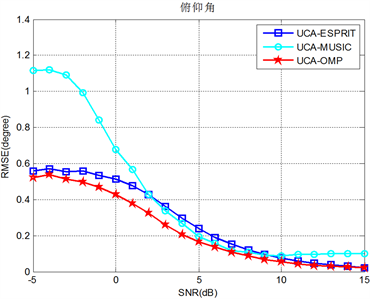
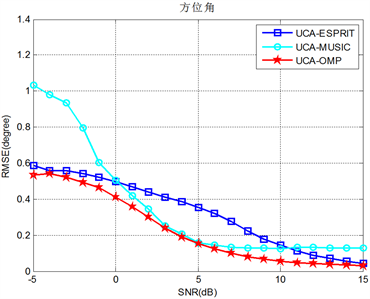
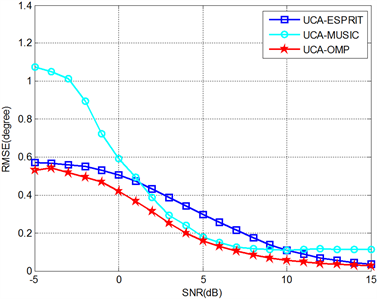
Figure 6. The RMSE comparison of several algorithms under different SNR
图6. 不同信噪比下各算法的RMSE比较
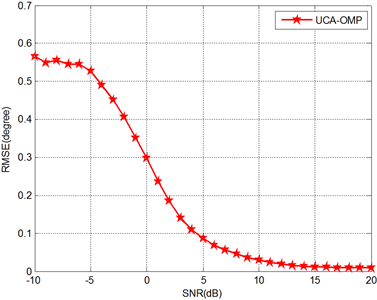
Figure 7. The RMSE-SNR plot of the algorithm under coherent sources
图7. 相干信源下该算法的RMSE-SNR图
理即可对相干信源进行估计。但目前基于均匀圆阵的压缩感知研究甚少,主要原因是其阵列流型矩阵不符合范德蒙矩阵结构。针对此,论文提出了一种均匀圆阵下基于压缩感知理论的估计算法。该算法首先利用模式空间转换将阵元空间的均匀圆阵转换成模式空间的虚拟线阵,使其符合Vandermonde结构;其次基于阵列流型矩阵建立DOA估计模型,将获得的阵列接收数据列数采用奇异值分解的方法进行降维;然后将接收数据矢量转化为稀疏表示问题,进而利用正交匹配追踪算法对方位角进行稀疏求解;最后根据求得的方位角估计值反推得到俯仰角估计值。综上所述,论文的优势主要体现在以下三个方面:
1) 无需空间平滑等预处理即可实现相干信源的DOA估计;
2) 利用模式转换,使得阵列流型矩阵满足范德蒙矩阵要求;
3) 通过奇异值分解将阵列接收数据进行降维,得到低维的信号子空间,降低了运算的复杂度,提高了算法的抗噪性能。
通过理论分析和实验证明,该算法同时适用于相干和非相干情况,对于不同条件下的二维DOA估计相较于其他经典算法也具有一定的优势。
文章引用
余小游,蒋娅林,余 苗,杨 琦. 均匀圆形阵列天线的压缩感知二维DOA估计方法
Compressed Sensing 2-D DOA Estimation for the Uniform Circular Array[J]. 天线学报, 2020, 09(02): 19-29. https://doi.org/10.12677/JA.2020.92003
参考文献
- 1. 王永良, 陈辉, 彭应宁, 万群. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2004.
- 2. Wang, L. and Fei, W. (2012) A Joint Estimation Method of Azimuth, Elevation, Range and Polarization for Near Field Sources Based on Second Order Statistics. Proceedings of 2011 International Conference on Computer Science and Network Technology, Harbin, 24-26 December 2011, 771-775.
- 3. Fu, T., Chen, J. and Gao, X. (2006) Joint Angle and Frequency Estima-tion with Uniform Eigenvalue Weighting. First International Conference on Communications and Networking in China, Beijing, 25-27 October 2006, 25-27. https://doi.org/10.1109/CHINACOM.2006.344657
- 4. Chen, Y.F. and Yen, S.L. (2002) Smart Antenna with Joint Angle and Delay Estimation for the Geolocation,SMART Uplink and Downlink Beamforming. 6th International Conference on Signal Processing, Beijing, 26-30 August 2002, 393-397.
- 5. Tohanean, C. and Picheral, J. (2007) BER Performance Improvement with Joint Angle-Delay-Polarization Estimation of Multipath Channel Parameters. IEEE Vehicular Technology Conference, Montreal, 25-28 September 2006, 1-5. https://doi.org/10.1109/VTCF.2006.31
- 6. Hu, Z.H., He, F. and Zhu, J.B. (2011) L-Shaped 2-D DOA Estimation Using Blind Source Separation. Proceedings of SPIE: The International Society for Optical Engineering, Cairo, Egypt, 1-2 October 2011, 8285.
- 7. Mathews, C.P. and Zoltowski, M.D. (1994) Eigenstructure Techniques for 2-D Angle Estimation with Uniform Circular Arrays. IEEE Transactions on Signal Processing, 42, 2395-2407. https://doi.org/10.1109/78.317861
- 8. Askari, M. and Karimi, M. (2013) Sector Beamforming with Uniform Circular Array Antennas Using Phase Mode Transformation. 21st Iranian Conference on Electrical Engineering, Mashhad, 14-16 May 2013, 1-6. https://doi.org/10.1109/IranianCEE.2013.6599708
- 9. 潘捷, 周建江, 汪飞. 非均匀噪声稀疏均匀圆阵的二维DOA估计[J]. 航空学报, 2011(3): 75-83.
- 10. Roos, F. et al. (2019) Compressed Sensing Based Single Snapshot DoA Estimation for Sparse MIMO Radar Arrays. 12th German Microwave Conference, Stuttgart, 75-78. https://doi.org/10.23919/GEMIC.2019.8698136
- 11. Xue, H.X. and Zhao, Y.J. (2013) DOA Estimation Based on Compressive Sampling Array. Journal of Electronic Measurement & Instrument, 26, 208-214. https://doi.org/10.3724/SP.J.1187.2012.00208
- 12. Du, Z.-M., Ye, F.-Y., Shi, H., et al. (2015) A Fast Recovery Method of 2D Geometric Compressed Sensing Signal. Circuits Systems & Signal Processing, 34, 1711-1724. https://doi.org/10.1007/s00034-014-9913-3
- 13. Candes, E.J., Romberg, J. and Tao, T. (2004) Robust Uncertainty Principles: Exact Signal Reconstruction from Highly Incomplete Frequency Information. IEEE Transactions on In-formation Theory, 52, 489-509. https://doi.org/10.1109/TIT.2005.862083
- 14. Asif, M.S. and Romberg, J. (2012) Fast and Accurate Algorithms for Re-Weighted L1-Norm Minimization. IEEE Transactions on Signal Processing, 61, 5905-5916. https://doi.org/10.1109/TSP.2013.2279362
- 15. Malioutov, D.M., Müjdat, Ç. and Willsky, A.S. (2005) Sparse Signal Reconstruction Perspective for Source Localization with Sensor Arrays. IEEE Transactions on Signal Processing, 53, 3010-3022. https://doi.org/10.1109/TSP.2005.850882
- 16. Xu, Z. (2012) The Performance of Orthogonal Multi-Matching Pursuit under RIP.
NOTES
*通讯作者。