Software Engineering and Applications
Vol.
12
No.
01
(
2023
), Article ID:
61400
,
11
pages
10.12677/SEA.2023.121002
静脉穿刺机器人系统的应用与发展
徐欣茹1,丁皓2,夏冬阳1,丁思吉1,盛诗梦1
1上海理工大学健康科学与工程学院,上海
2上海健康医学院医疗器械学院,上海
收稿日期:2023年1月9日;录用日期:2023年2月8日;发布日期:2023年2月15日

摘要
静脉穿刺机器人系统是一种代替人工实行静脉穿刺的医疗辅助系统,在医疗自动化领域具有很重要的实际应用价值。该文结合国内外穿刺机器人系统研究进展,根据功能对整个系统进行了模块化分类,包括静脉成像模块、穿刺执行模块及穿刺反馈模块。然后对各模块分别进行介绍,梳理了各模块的相关研究与应用。最后总结了静脉穿刺机器人系统的优势和存在的问题,并对未来的发展方向提出了展望。
关键词
静脉穿刺系统,医疗机器人,静脉成像技术

Application and Development of Venipuncture Robot Systems
Xinru Xu1, Hao Ding2, Dongyang Xia1, Siji Ding1, Shimeng Sheng1
1School of Health Science and Engineering, University of Shanghai for Science and Technology, Shanghai
2School of Medical Instruments, Shanghai University of Medicine & Health Sciences, Shanghai
Received: Jan. 9th, 2023; accepted: Feb. 8th, 2023; published: Feb. 15th, 2023

ABSTRACT
The venipuncture robot system is a medical assistance system that replaces manual venipuncture and has important practical applications in the field of medical automation. This paper combines the research progress of research on puncture robotic systems at home and abroad, classifies the whole system according to its function in a modular way, including the venous imaging module, the puncture execution module and the puncture feedback module, then briefly introduces each module and composes the relevant research and applications of each module. Finally, the advantages and problems of venipuncture robotic systems are summarized, and an outlook on future development directions is presented.
Keywords:Venipuncture System, Medical Robot, Venous Imaging

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
静脉穿刺是一种重要且常用的入侵性医学手段,其主要目的为建立静脉通路,用于输液、输血、用药等治疗。当前临床上静脉穿刺主要依靠医护人员进行,这种穿刺流程的成功率极大依赖医护人员的经验和熟练度,对于肤色较深、静脉较深的病人,尤其是婴幼儿、老年人及肥胖病人等,想要准确地进行静脉穿刺十分困难。此外,在野外救援、战场救治等一些不满足完善的医院临床条件的特殊场景下;或是重大疫情期间为了保证医护人员的安全,医护人员不便直接接触患者的情况下,人为直接操作并需保证一定的穿刺成功率便成为了难题。
为了解决当前临床静脉穿刺存在的问题,研究人员开始考虑采用机器人辅助或替代人工执行静脉穿刺。静脉穿刺系统将机器人技术应用到医疗行业,相比于人工穿刺能有效提高静脉穿刺精度和成功率,减少医护人员的工作量。特别是重大疫情期间,由于可以有效避免医护人员和患者直接接触,保护医护安全,静脉穿刺机器人系统显得尤为重要,在远程医疗及医疗自动化领域,拥有广阔的应用前景。然而,要想让机器完成静脉穿刺,还必须攻克以下几个难点:对静脉进行较为清晰的成像;高精度完成穿刺动作;明显的穿刺反馈等。针对以上难点,国内外的研究团队对静脉穿刺机器人系统展开了相关研究,并在静脉成像技术、穿刺执行机构设计以及穿刺数据反馈方式等方面取得了丰富的研究成果。
本研究结合静脉穿刺的难点,将静脉穿刺系统按功能大致分成三个模块:静脉成像模块、穿刺执行模块和穿刺反馈模块,对各模块的国内外相关研究进展分别进行了简单的梳理。
2. 静脉成像模块
静脉穿刺的首要条件是能够观察到较为清晰的静脉血管。传统的静脉血管穿刺方法通过扎止血带,并让病人握拳的方式突出显示静脉血管,以方便选择穿刺点。相应地,穿刺机器人系统中必须具备基于某种成像技术的静脉成像模块,才能使人体皮肤下的静脉血管能够较为清晰的显示出来。目前的静脉成像技术主要有超声成像、近红外成像和可见光成像等,国内外研究机构基于这些静脉成像技术开发了各种装置或系统。
2.1. 基于可见光成像技术的静脉成像
使用可见光对静脉进行成像的设备包括Translite公司的Veinlite LEDX透照仪 [1] 。这种透照仪由一个具有可变强度控制的卤素光源和一根连接到C形环上的光缆组成,采用侧向透照法实现静脉成像。在侧透技术中,需要将该仪器放置在皮肤上,光纤光以一定角度射入皮肤并集中在皮肤下,如图1所示。该设备可以对静脉进行无阴影成像,然而鉴于可见光穿透皮肤的能力有限,此类设备更多的是用于静脉硬化治疗,具有较大的局限性。
中国矿业大学李承东等人研制的静脉成像仪 [2] 采用了一种特殊的可见光光源,它是一种由单片机控制的红橙混合光源。该仪器对于多年龄阶段的静脉显示都具有适用性。这项技术已经申请了国家专利,并与徐州康福尔电子技术有限公司合作推出了KFR-JM1型静脉监护仪,如图2所示。但这种仪器在使用时必须通过外力使其与皮肤贴合,从而导致静脉血管产生一定的变形,影响医务人员进行静脉穿刺。另外,由于该设备没有使用红外线成像技术,所以对于静脉血管的显示不是很清晰,尤其是对脂肪层较厚的肥胖患者来说,显示效果不理想。

Figure 1. Veinlite transillumination technology
图1. Veinlite静脉侧透技术

Figure 2. Intravenous display instruments
图2. 静脉显示仪
2.2. 基于超声成像技术的静脉成像
超声成像利用声波反射的原理,对待检测组织发射超声波,并通过接受装置将人体内部不同的组织反射回来的声波进行处理,从而获得人体内部的图像。
国外研究人员曾尝试采用一种超声成像装置来引导静脉穿刺 [3] 。由于该设备将图像显示在外接的屏幕上,不仅导致设备体积较大,而且需要医护人员在执行静脉穿刺的同时观察屏幕,这对医护人员的技术水平和专注度要求较高。此外,该设备对金属针头的成像效果比较差,很难准确识别到针尖位置,因此,该设备对于高精度的静脉穿刺场景并不适用。
也有一些研究机构研发了便携式超声成像装置。美国研究机构研制了一种声波手电筒 [4] ,如图3,该装置无外接的屏幕,体积小巧,方便携带。该装置直接将成像图像投影到穿刺部位的上方,因此在执行穿刺的过程中,医护人员只需要专注于眼前被穿刺的部位。但是该装置显示的图像仅有一个截面,针尖易超出视野范围。另外,该装置在使用时必须压于皮肤表面,这会导致静脉血管产生一定的变形,影响医务人员进行静脉穿刺。类似的手持式装置还有 Sonic Window [5] 。如图4所示,该仪器等比例地将真实静脉影像通过一个界面进行显示。但是该装置检测精度较低,对于直径小于5 mm的静脉无法进行识别。
通过以上调研可知,超声成像具有技术成熟、安全的特点,但是基于该成像技术的静脉成像一般成本较高,且成像范围有限。此外,超声成像时需要使用耦合剂,容易在穿刺过程中造成污染。因此,该成像方式在静脉穿刺的应用上具有一定局限性。

Figure 3. Sonic flashlight
图3. 声波手电筒

Figure 4. Sonic Window ultrasound imaging device
图4. Sonic Window 超声成像装置
2.3. 基于近红外光成像技术的静脉成像
近红外光成像技术基于不同人体组织对于红外光吸收程度不同的原理,将人体血管中的血红蛋白和周围其他组织区分开来,进而可以实现静脉成像。国外的研究机构对近红外静脉成像装置的研究起步很早,用于近红外成像的技术也相对成熟,并推出了一系列的产品。Belson公司生产了一款BS1000型静脉成像仪,如图5所示,该静脉成像仪采用液晶屏幕显示方式,将红外敏感的摄像机采集到的静脉图像直接显示到液晶屏上,以便给医护人员执行穿刺时提供参考。该公司进一步开发的BS2000+型静脉成像仪采用了图像投影的方式,将采集的静脉图像投影回原皮肤位置处,如图6所示。类似的产品还有Christie Medical公司与Tennessee大学的学者合作推出的一款静脉成像装置Vein Viewer [6] 。如图7所示,该装置采用近红外光源进行成像,并利用投影装置将静脉图像投影到皮肤上,方便医护人员执行静脉穿刺。该装置的静脉检测精度和图像投影精度较高,且可以通过对采集到的图像进行计算机处理,获得静脉的皮下位置信息。此外,美国的Luminetx公司还推出了一款静脉显像仪,同样可以获取皮下静脉的位置。该仪器向检测部位投射红外光,然后用摄像头捕获反射光并进行成像。在近红外图像中,静脉的颜色深浅包含了其深度信息,处于较深皮下位置的血管会在图像中呈现出较暗的颜色,基于这一性质对成像图像进行处理,即可得到静脉的皮下深度。但由于当时的技术还不是很成熟,所以成像效果不佳,且价格昂贵。
国内对于近红外静脉成像装置的研究起步较晚,但发展极其迅速。浙江大学刘向东团队研发了一种双波长激光扫描式静脉成像装置 [7] 。该装置采用可见光和红外光两种激光器作为光源,并利用一个红外光探测器捕获反射光进行成像。但是该装置结构复杂、成本过高,难以普及和推广。西安交通大学的王庆源发明的投影式红外静脉血管成像设备由红外相机和投影仪器组成 [8] ,该装置可以同比例显示皮下静脉血管,但是由于采集的静脉图像未经过图像处理就直接投影到了皮肤上,导致得到的静脉图像边缘不清晰,增大了静脉穿刺的难度。国内最新的研究是由罗婧提出的一种近红外血管显像系统 [9] 。该系统利用近红外检测技术采集手背静脉图像后,先后采用图像增强、图像分割及投影校正算法使静脉边缘图像按原始比例投影在被测部位。不同于市面上的大多数产品采用分光镜来实现静脉图像的投影,该系统直接采用投影校正算法对投影图像进行调整,不仅简化了系统结构,还降低了成本。但该系统仅适用于手背部位的血管显像,在静脉穿刺领域,不具有普遍适用性。类似的还有王国徽等人研制的一种基于树莓派的便携式静脉投影仪 [10] ,该仪器由树莓派、微机电系统以及红外摄像头等组成。该静脉投影仪可实现静脉的原位置投影,具有成本低、体积小的优点。但由于研究不成熟,该系统无法实现复杂算法。
静脉穿刺系统中的静脉成像装置可以有效提高穿刺的成功率,尤其是对于静脉血管显示不佳的穿刺困难患者,减轻了穿刺的风险和痛苦。通过以上调研可知,可见光的穿透能力有限,因此对于静脉的成像效果不佳,未能在静脉穿刺领域得到广泛使用。目前主流的静脉成像装置主要基于超声成像和近红外成像技术,它们各有利弊:超声波易穿透人体组织,因此超声成像对于脂肪组织层较厚的人群也具有适用性,适用范围广泛。但是其成像范围小,且对操作人员的专业水平要求较高。相比于超声成像,近红外成像范围广,但劣势在于难以提供精确的静脉深度信息。这些基于不同成像技术的静脉成像装置静根据显示方式的不同,又可以大致分为液晶屏幕显示和图像投影方式两种。其中图像投影方式是在传统液晶屏幕显示方式基础上的进一步发展,相比于液晶屏幕显示方式,该方式下医护人员可以专注于投影部位,也即待穿刺区域,而无需观察另外的屏幕,能有效提高穿刺效率。

Figure 5. BS1000 venous imaging instruments
图5. BS1000型静脉成像仪

Figure 6. BS2000+ venous imaging instruments
图6. BS2000+型静脉成像仪

Figure 7. Vein Viewer NIR projector
图7. Vein Viewer近红外投影仪
3. 穿刺执行模块
由于静脉成像装置主要实现的是静脉显影的功能,不能直接协助插针,穿刺的成功仍然取决于医护人员准确插针的能力。随着机器人技术的发展,研究人员逐渐开始尝试在静脉穿刺辅助系统中加入穿刺执行机构,使用机器人去自动执行静脉穿刺,在保证高精度、平稳地完成穿刺动作的前提下完全将医护人员解放出来。
国外的研究团队很早就对穿刺执行机构的设计展开过研究,穿刺执行机构的本体大多为工业机械臂。早期的穿刺机器人自由度较少,最初由Okuno等人开发出了一种单自由度穿刺机器人 [11] ,如图8所示。但是由于受到自由度的限制,该穿刺机器人只能作为实验平台使用。
为了能让穿刺机器人实现精度更高、更平稳的穿刺动作,完成复杂性更高的任务,必须使其在结构上具有更多的自由度。伍斯特理工学院Paul等人研制的静脉穿刺辅助设备 [12] 利用四自由度机械臂操作针头完成扎针动作,如图9所示。罗格斯大学Chen等人 [13] 设计了一款便携式静脉穿刺机器人,如图10所示,该机器人结构上采用五自由度直角坐标式组合机械臂,但是没有上下垂直方向的运动自由度。Balter等人 [14] 开发的台式机器人静脉穿刺机器人共具有七个自由度,该机器人包含一个三自由度的机架和一个四自由度的机械臂。由于该机器人的自由度有冗余,且控制方案复杂,操作困难度较高。该团队后续对该穿刺机器人的末端执行器进行了改进 [15] 。如图11所示,该机器人系统的末端执行器包含一个三自由度的机动针头操纵器,通过增加的两个自由度实现了更灵活的针姿调节,但其大尺寸需要将其固定在手术台上,限制了其实际使用场景。为了降低设备复杂性,该团队最新开发了一种小型化的手持式嵌入式设备VeniBot [16] 。如图12所示,操作员只需手持该设备放置并保持在穿刺部位区域,设备就能识别合适的血管超声成像并插入连接的针头。
在国内,郭克友等人 [17] 设计并提出了一种的智能穿刺系统,此系统的穿刺执行部分是五自由度混联机械臂机构,具有体积小、便携带、刚度大且无积累误差的优点。

Figure 8. A single DOF automatic venipuncture platform
图8. 单自由度自动穿刺平台

Figure 9. Assistive devices developed by Paulo
图9. Paulo研制的辅助设备
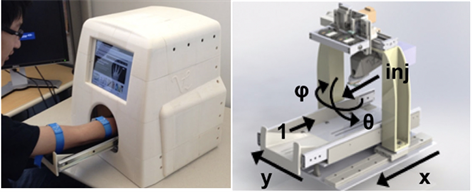
Figure 10. Portable robot for autonomous venipuncture developed by Chen
图10. Chen的便携式自动穿刺机器人

Figure 11. A 9-DOF venipuncture robot
图11. 一种九自由度穿刺机器人
4. 穿刺反馈模块
在静脉穿刺机器人系统中,机器人控制稍有不慎就会对患者造成伤害。在传统人工静脉穿刺中,医护人员往往根据以往经验,凭借手部感受到的穿刺力来大概的感知针尖位置,当感受到明显的阻力减小,也就是通常所说的“落空感”,并且看到回血时,表明针尖进入血管。因此,为了让机器人自主完成

Figure 12. VeniBot-Handheld device for peripheral catheterization
图12. 外周导管插入术的手持设备VeniBot
静脉穿刺动作,静脉穿刺机器人还必须具备一定的感知系统,也即穿刺反馈模块以提供实时的反馈信息。静脉穿刺系统的穿刺反馈模块一般由成像设备、传感器等作为数据采集装置,将采集到的图像信息、穿刺力等数据通过模数转换电路,反馈给控制器,从而对穿刺进行引导。最初的静脉穿刺机器人系统大多基于视觉反馈方法,利用静脉成像装置实现穿刺过程中的视觉引导。为了对穿刺机器人实现更精准的控制,研究人员开始在穿刺系统的反馈模块中增加用于实时检测穿刺反馈力或针尖周围组织的电阻抗的传感器,并探索多种反馈结合的方法引导穿刺,以提高控制效果。
4.1. 基于视觉反馈的静脉穿刺引导
根据静脉的成像方式可以将视觉反馈分为超声图像反馈和近红外图像反馈方式。近红外图像反馈的优点是成像范围广,整个运动过程都在相机的视野范围内,缺点是难以获得精确的静脉深度信息,容易导致穿刺失败。超声引导的优点是能够获得准确的深度信息,但成像范围较窄,针头易偏离视野。Chen等人 [13] 开发的便携式静脉穿刺机器人采用双目近红外相机进行静脉成像,然后通过立体视觉算法进行三维重构,利用获得的静脉三维图像实现穿刺过程中的视觉引导。该装置完全基于反馈的三维近红外图像来执行静脉穿刺,因此穿刺成功率依赖于立体匹配算法的精度。为了进一步提高穿刺的精确度,该团队研发了静脉穿刺机器人VenousPro [14] 。该机器人的数据采集部分由近红外相机和超声探头两部分组成,采用两种视觉反馈结合的方式,根据相机采集的近红外图像选择穿刺点,再由超声引导执行穿刺。这种反馈模式结合了两种视觉反馈的优势,但是整个过程需要进行两种视觉反馈模式的切换。类似的还有Max等人 [18] 研制的静脉穿刺机器人,结合了三维近红外成像和超声图像跟踪针头位置,以15˚的角度将针插入静脉,误差可以达到0.3 mm。
4.2. 基于生物组织特性的静脉穿刺引导
在传统静脉穿刺中,医护人员需要根据感受到的穿刺反馈力判断针尖是否进入血管,从而对进针角度与速度进行相应的调整。目前己有的静脉穿刺机器人系统,很多只有视觉反馈而没有力反馈。因此,在静脉穿刺系统的穿刺数据反馈模块中,一些学者开始引入相关传感器,以便获得除了视觉信息以外的关于进针过程的更多信息,从而更精确地引导机器人执行静脉穿刺针插入。基于生物组织特性的静脉穿刺引导方法主要包括进针过程中对组织反馈力和组织电阻抗的测量。国外对很早就对穿刺力实验平台展开过研究。Daisaku [19] 等人设计的一种穿刺机器人,采用力传感器实时检测穿刺过程中的力反馈值。该团队通过活兔耳静脉穿刺实验观察穿刺过程中力的峰值变化,为自动控制进针提供了理论基础。BOER等人 [20] 研发的静脉穿刺机器人可以通过末端执行器的力传感器实时检测穿刺力,如图13所示。该团队设计了人体组织模型,用泵模拟血液流动,并对不同穿刺角度和速度下的穿刺力进行实验,讨论了穿刺角度和速度对产生的穿刺力的影响。He等人 [21] 提出了一种生物力学模型,该模型考虑了人体组织的弹性变形、切割和摩擦,可适用于不同的静脉穿刺条件,穿刺成功率可以达到90%。哈尔滨工业大学的团队设计了一款六自由度穿刺手术辅助机器人,该机器人加装的力传感器用于采集穿刺力数据。研究团队基于此实验平台展开肝组织穿刺实验,建立了肝组织穿刺力模型。为了进一步提升控制效果,任浩等人 [22] 后续在该静脉穿刺机器人的原理样机的基础上,设计了视觉引导与力反馈结合的控制策略。类似的研究还有Chen等人 [15] 对静脉穿刺机器人VenousPro进行的改进,在其末端执行器上安装了力传感器,用于穿刺过程的力反馈。根据反馈回来的力,来感知针尖是否刺破血管,进而对针的位姿进行调整。使该机器人在视觉引导穿刺的基础上,增加了穿刺力反馈,实现了更多样的引导模式。
基于生物组织电阻抗的静脉穿刺引导方法是根据不同组织的导电性不同这一原理,通过测量电阻抗判断进针进程。由于生物组织的电特性随其含水量、细胞类型和成分而变化,因此可以基于电导率的变化区分不同的组织类型。LIU等人 [23] 基于此,进行了用于阻抗传感技术研究的组织模拟模型的评估,用三种不同的组织模拟模型来代表血液、脂肪和皮肤,并通过电极探针评估电性能。该分层组织结构的测试证明了基于阻抗的静脉穿刺引导方法的可行性。此外,He等人 [24] 提出了一种基于生物组织电特性的机器人静脉穿刺决策方法,并介绍了一种可以测量电阻抗的改进型穿刺针。该方法通过测量针尖周围组织的电阻抗来识别针插入过程中进入的不同组织类型,并能够检测到血液来快速和可靠地表征已经进入静脉。

Figure 13. A 6-DOF Venipuncture Robot
图13. 一种六自由度静脉穿刺机器人
5. 展望
随着医用机器人技术的不断发展与进步,静脉穿刺系统越来越贴合日常医院环境的使用需求,如今已经发展到一个新高度。尤其是在此次疫情背景下,静脉穿刺系统作为一种无接触式的医用机器人,具有广泛的应用前景。但是现有的静脉穿刺机器人系统由于价格昂贵、结构和控制过于复杂、静脉成像不够清晰、血管深度不能测量等问题,大都处在实验室阶段,应用到临床还需要大量安全论证与实验论证。结合国内外的发展现状,静脉穿刺机器人系统的发展还需从以下几个方面进行突破。
1) 完善的静脉图像增强方法
对静脉进行较为清晰的呈现是穿刺成功的前提。静脉图像的清晰度不仅依赖于成像系统,还取决于后续的图像处理处理操作。图像降噪、畸形校正等是常用的静脉图像增强方法,可以有效改善图像质量,提高后期静脉定位的精确度。现有的静脉图像增强算法较为单一,系统性不够强,缺少较完整的静脉图像处理算法。因此,研究成像更清晰的静脉成像系统和更完善的静脉图像处理算法对提高穿刺成功率有重要意义。
2) 静脉三维定位技术
静脉血管的深度信息在医护人员进行静脉穿刺时具有重要的参考价值,也是最难测量的参数。然而,静脉成像装置采集的图像难以直接提供精确的静脉深度信息,采用超声成像是解决该问题的方法之一,但是超声成像的成本较高。基于近红外成像得到的静脉图像要想获得准确的静脉皮下深度值,则必须先进行一系列的图像处理算法,才能最终实现血管的三维定位。目前主流的静脉定位技术是立体视觉方法,通过立体匹配算法进行三维重构。但是即使采用立体匹配算法得到的静脉深度仍然存在一定误差。因此,对静脉定位技术进行更深入的研究,并应用到静脉穿刺系统中为其提供血管位置信息是非常有必要的。
3) 功能一体化
现有的静脉穿刺机器人系统大多只包括静脉图像采集和穿刺执行机构部分,只能实现整个静脉穿刺流程中最核心的功能,即静脉定位和穿刺功能,对于包含穿刺前后附加功能的整套系统的研究较少,比如穿刺前的穿刺对象确认、导入电子病历、消毒,以及穿刺完毕后的注射或采血动作、退针后的按压止血动作等等。因此,实现功能一体化是静脉穿刺系统发展的主要方向。
文章引用
徐欣茹,丁 皓,夏冬阳,丁思吉,盛诗梦. 静脉穿刺机器人系统的应用与发展
Application and Development of Venipuncture Robot Systems[J]. 软件工程与应用, 2023, 12(01): 8-18. https://doi.org/10.12677/SEA.2023.121002
参考文献
- 1. Gümüs, M. and Basbakkal, Z. (2021) Efficacy of Veinlite PEDI in Pediatric Peripheral Intravenous Access A Randomized Controlled Trial. Pediatric Emergency Care, 37, 145-149.
- 2. 李承冬, 何小永, 马振刚. 简易式静脉显影仪[P]. 中国专利, CN302203990S. 2012-11-28.
- 3. Brunette, W., Gerard, W., Hicks, M.A., et al. (2010) Portable Antenatal Ultrasound Platform for Village Midwives. Proceedings of the First ACM Symposium on Computing for Development, London, 17-18 December 2010. https://doi.org/10.1145/1926180.1926209
- 4. Zheng, Y., Zhou, H.J., Tao, N.A., et al. (2022) Prevention of Catheter Tip Malposition with an Ultrasound-Guided Finger-Pressure Method to Block the Internal Jugular Vein during PICC Placement: A Meta-Analysis. Videosurgery and Other Miniinvasive Techniques, 17, 289-298. https://doi.org/10.5114/wiitm.2022.115198
- 5. Wang, S.Y., Hossack, J.A. and Klibanov, A.L. (2020) From Anatomy to Functional and Molecular Biomarker Imaging and Therapy: Ultrasound Is Safe, Ultrafast, Portable, and Inexpensive. Investigative Radiology, 55, 559-572. https://doi.org/10.1097/RLI.0000000000000675
- 6. VT, G. (2021) A Novel Design Proposal for Low-Cost Vein-Viewer for Medical and Non-Contact Biometric Applications Using NIR Imaging. Journal of Medical Engineering & Technology, 45, 303-312. https://doi.org/10.1080/03091902.2021.1895898
- 7. 张帆, 刘向东. 基于双波长激光扫描的皮下静脉显示装置[J]. 浙江大学学报(工学版), 2010, 44(2): 294-299.
- 8. 王庆源. 一种红外静脉血管显像装置[P]. 中国专利, CN202821303U. 2013-03-27.
- 9. 罗婧. 近红外血管显像系统设计及图像处理算法研究[D]: [硕士学位论文]. 重庆: 重庆大学, 2021.
- 10. 王国徽, 马竞, 卫洪涛. 基于树莓派的便携式静脉投影仪的研制[J]. 医疗卫生装备, 2022, 43(1): 36-39+57.
- 11. Okuno, N., Hara, K., Mizuno, N., et al. (2022) B2 Puncture with Forward-Viewing EUS Simplifies EUS-Guided Hepaticogastrostomy (with Video). Endoscopic Ultrasound, 11, 319-324. https://doi.org/10.4103/EUS-D-21-00154
- 12. Carvalho, P., Kesari, A., Weaver, S., Flaherty, P. and Fischer, G.S. (2015) Robotic Assistive Device for Phlebotomy. Proceedings of the ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, 2-5 August 2015. https://doi.org/10.1115/DETC2015-47620
- 13. Chen, S., Lin, Y., Li, Z., Wang, F. and Cao, Q. (2022) Automatic and Accurate Needle Detection in 2D Ultrasound during Robot-Assisted Needle Insertion Process. International Journal of Computer Assisted Radiology and Surgery, 17, 295-303. https://doi.org/10.1007/s11548-021-02519-6
- 14. Balter, M.L., Chen, A.I., Maguire, T.J. and Yarmush, M.L. (2015) The System Design and Evaluation of a 7-DOF Image-Guided Venipuncture Robot. IEEE Transactions on Robotics, 31, 1044-1053. https://doi.org/10.1109/TRO.2015.2452776
- 15. Chen, A.I., Balter, M.L., Maguire, T.J. and Yarmush, M.L. (2020) Deep Learning Robotic Guidance for Autonomous Vascular Access. Nature Machine Intelligence, 2, 104-115. https://doi.org/10.1038/s42256-020-0148-7
- 16. Leipheimer, J., Balter, M., Chen, A., and Yarmush, M. (2022) Design and Evaluation of a Handheld Robotic Device for Peripheral Catheterization. Journal of Medical Devices, 16, Article ID: 021015. https://doi.org/10.1115/1.4053688
- 17. 王凯迪, 郭克友, 谭梦玲. 五自由度PICC精密细微静脉穿刺机械臂的运动分析与控制策略[J]. 机械设计与研究, 2020, 36(1): 102-106+110.
- 18. Balter, M.L., Chen, A.I., Fromholtz, A., et al. (2016) System Design and Development of a Robotic Device for Automated Venipuncture and Diagnostic Blood Cell Analysis. Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, 9-14 October 2016, 514-520. https://doi.org/10.1109/IROS.2016.7759102
- 19. Okuno, D., Togawa, T., Saito, H. and Tsuchiya, K. (1998) Development of an Automatic Blood Sampling System: Control of the Puncturing Needle by Measuring Forces. Proceedings of the 20th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vol. 20 Biomedical Engineering towards the Year 2000 and Beyond, Hong Kong, 1 November 1998, 1811-1812. https://doi.org/10.1109/IEMBS.1998.746941
- 20. De Boer, T., Steinbuch, M., Neerken, S. and Kharin, A. (2007) Laboratory Study on Needle-Tissue Interaction: Towards the Development of an Instrument for Automatic Venipuncture. Journal of Mechanics in Medicine and Biology, 7, 325-335. https://doi.org/10.1142/S0219519407002297
- 21. He, T., Guo, C., Liu, H. and Jiang, L. (2022) Research on Robotic Humanoid Venipuncture Method Based on Biomechanical Model. Journal of Intelligent & Robotic Systems, 106, Article No. 31. https://doi.org/10.1007/s10846-022-01738-6
- 22. 任浩. 全自动静脉穿刺机器人感知与控制的研究[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2020.
- 23. Liu, J., Goehring, C., Schiele, F., Moeller, K. and Pott, P.P. (2021) Fabrication and Experimental Evaluation of Simple Tissue-Mimicking Phantoms with Realistic Electrical Properties for Impedance-Based Sensing. International Journal of Integrated Engineering, 13, 127-136. https://doi.org/10.30880/ijie.2021.13.05.014
- 24. He, T., Guo, C., Liu, H. and Jiang, L. (2022) Research on Puncture Status Perception of Venipuncture Robot Based on Electrical Impedance. In: Liu, H., Yin, Z., et al., Eds., Intelligent Robotics and Applications. ICIRA 2022. Lectu