Geomatics Science and Technology
Vol.03 No.02(2015), Article ID:15077,5
pages
10.12677/GST.2015.32004
Research of Model on the Horizontal Angle Accuracy of 3D-Laser Scanner
Shiyi Cai, Min Cai, Min Wang, Qi Zhang, Chen Dong
Tianjin Institute of Surveying and Mapping, Tianjin
Email: cai_shiyi@126.com
Received: Mar. 23rd, 2015; accepted: Apr. 8th, 2015; published: Apr. 15th, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Nowadays, the applications of 3D-Laser Scanning Technology are widespread, so the examination and assessment of 3D-Laser Scanner’s accuracy become more and more important. This paper introduces a method of 3D-Laser Scanner’s horizontal angle accuracy examination and assessment, by using high-accuracy total station as reference, then setting up calibration mode and compiling computer program. In the examination field, using the target angle surveying result of high-accu- racy total station Leica TCA 2003 as reference, the target angle scanning result of 3D-Laser Scanner Leica ScanStation C10 can be examined. Then, the assessment and correction of the 3D-Laser Scanner’s horizontal angle accuracy can calculate by the computer program.
Keywords:3D-Laser Scanning, Angle Accuracy, Calibration Field, Calibration Mode, Assess Accuracy
三维激光扫描仪水平角检校模型研究
蔡士毅,蔡敏,汪闽,张奇,董晨
天津市测绘院,天津
Email: cai_shiyi@126.com
收稿日期:2015年3月23日;录用日期:2015年4月8日;发布日期:2015年4月15日

摘 要
随着三维激光扫描技术的广泛应用,三维激光扫描仪的精度检测、评估也更加重要。本文提出了一种以高精度全站仪为基准对三维激光扫描仪水平角测角精度进行检测和改正方法,建立平差模型,并编写计算程序。在检校场中,以Leica TCA2003高精度全站仪的标靶角度测量结果作为基准,对Leica ScanStation C10三维激光扫描仪经过扫描、反算得到标靶角度进行检校。通过程序计算对三维激光扫描仪的水平角测量精度进行评定和改正。
关键词 :三维激光扫描,测角精度,检校场,平差模型,精度评定

1. 概述
三维激光扫描技术,主要通过三维激光扫描仪获取大量三维观测数据,然后通过一定的算法软件对观测数据进行处理,从而得到需要的三维立体模型等成果 [1] 。三维激光扫描技术能够快速、方便、准确地获取近距离静态物体的空间三维模型,以便对模型进行分析和处理。激光扫描仪所获得的数据是由离散的三维点构成的点云。三维激光扫描技术获取的点云数据,可以达到毫米级的采样间隔,从而激光扫描技术可以应用于工程测量、古建筑和文物保护、数字城市等领域,并已有许多成功例子[2] [3] 。
然而,三维激光扫描仪在使用过程中,对于仪器的精度和指标都有严格的研究。事实上,三维激光扫描仪的分辨率、回波、时间和大气影响等都是影响点云精度的误差来源 [4] 。通常情况,仪器与被测点的距离越近,激光光斑越小,分辨率越高,回波信号越强,相应的测量精度就越高,反之,则测量精度越低。此外,回波还受目标材质的反射率和边缘效应影响。
现有关于三维激光扫描技术的研究较多集中在逆向工程中的应用及数据处理,然而三维激光扫描仪作为三维激光扫描技术的硬件核心,仪器的精度检校是实际工程中需要面对的重要问题,激光扫描测量仪器的精度也影响三维点云模型的建立和应用,因此三维激光扫描仪的检校与精度评估对于三维激光扫描仪的有效应用是十分必要的、重要的。
本文以Leica ScanStation C10三维激光扫描仪作为待检仪器,该仪器标称角度精度(水平/垂直)为12 [5] 。采用Leica TCA2003测量机器人作为基准仪器,其标称测角精度为0.5。
2. 水平角角度检校模型
三维激光扫描仪和电子全站仪同样是在固定位置获取观测值的仪器,本文假设三维激光扫描仪与电子全站仪有类似的误差来源,并借鉴了全站仪的轴系误差校正方法 [6] ,布设一定的控制点进行检校。
本文所采用的激光扫描仪的工作原理与传统测角仪器不同,不能通过盘左、盘右来消除视准轴误差提高精度。可认为该扫描仪存在如下的轴系误差:
1) 激光光束不垂直于扫描棱镜旋转轴的误差c,它对水平角的影响为ccosα;
2) 棱镜旋转轴倾斜误差k,它对水平角的影响为ktanα。其中α为扫描目标的垂直角。
因此,三维激光扫描仪的第i个水平角观测值 可表示为:
可表示为:
 (2-1)
(2-1)
其中 ,
, ,
, 表示基准仪器第i个水平角观测值。相应的误差值可表示为:
表示基准仪器第i个水平角观测值。相应的误差值可表示为:
 (2-2)
(2-2)
故,列立误差方程式为:
 (2-3)
(2-3)
其中, ,
, ,
, ,
, 。
。
根据最小二乘原理,得到法方程为:
 (2-4)
(2-4)
利用间接平差解算得到轴系误差估值 及
及 ,同时计算出角度观测值改正数vi。
,同时计算出角度观测值改正数vi。
并计算出水平角观测中误差估值 :
:
 (2-5)
(2-5)
其中,n为观测值个数,t为待估参数个数,这里取t = 2。
水平角内符合精度m可按照公式计算。
 (2-6)
(2-6)
本文所做实验取n = 8,即每个水平角重复测量8次。
根据上述平差模型,编写Matlab程序[7] ,解算待估参数。
3. 检校方案设计
3.1. 建立角度检校场
水平角的检校场为如图1所示,在离墙壁一定距离处的地面上确定一设站点,在墙上沿水平方向布设A~H,共8个平面黑白靶标。每个黑白标靶均与仪器间隔30~40 m,其平均间距约为35 m,待检三维激光扫描仪的理想工作距离为50 m以内。
3.2. 基准角度测量
如图3所示,将Leica TCA 2003全站仪置于仪器位上对中整平,按照国家四等导线限差标准[8] ,采用一测回全圆测回法,分别测设墙上8个平面靶标的方向值,并计算测站与各平面靶标间的水平角。记录每个测站观测时间、温度和气压,以便对数据进行误差分析。因该全站仪标称测角精度为0.5,而待检三维激光扫描仪的标称测角精度为12,故可将该全站仪测量得到的水平角观测值作为基准值。
3.3. 三维激光扫描仪角度扫描
为了避免对中整平误差,固定三脚架与对中器不变,将Leica ScanStation C10三维激光扫描仪置于设站点,分别对8个墙上平面黑白靶标进行扫描,记录测站扫描时间、温度和气压,以便对数据进行误差
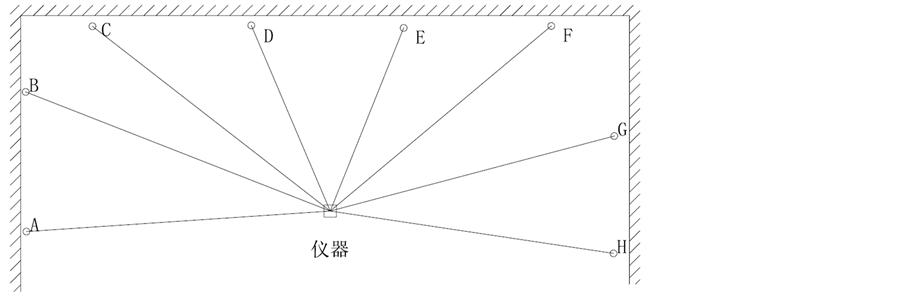
Figure 1. Network of 3D scanner’s horizontal angle accuracy examination
图1. 扫描仪水平角检校网图
分析。每个平面标靶测量8次,根据8次扫描结果分别进行标靶拟合,并反算出水平角值,可以分析出三维扫描仪测角内符合精度对其水平角测角精度的影响。图2为黑白标靶及其点云模型。
然后由Leica Cyclone后处理软件,计算各个标靶三维坐标 ,然后反算出各个水平角
,然后反算出各个水平角 ,以全站仪水平角观测结果为基准,并由公式(2-4)计算出激光光束不垂直于扫描棱镜旋转轴的误差估值
,以全站仪水平角观测结果为基准,并由公式(2-4)计算出激光光束不垂直于扫描棱镜旋转轴的误差估值 和棱镜旋转轴倾斜误差估值
和棱镜旋转轴倾斜误差估值 ,同时计算出角度观测值改正数vi。并由公式(2-5)计算出水平角观测值的中误差估值
,同时计算出角度观测值改正数vi。并由公式(2-5)计算出水平角观测值的中误差估值 。
。
4. 数据处理与分析
根据设计方案,建立水平角检校场。首先,按照四等导线精度要求,利用Leica TCA2003全站仪测量8个平面黑白标靶间水平角值,测站平差后得到的基准角度,如表1所示。
应用待检三维激光扫描仪Leica ScanStation C10对8个平面黑白标靶进行扫描均扫描8次,应用式(2-6)计算,分别得到8个水平角的内符合精度如图3所示。
内符合精度均值为0.56,与基准仪器标称精度相当,与待检三维激光扫描仪标称精度12相比,本文认为其影响可以忽略,故采用每个水平角度8个重复扫描结果的均值作为其水平角度。
按照本文提出的水平角平差模型,可由式(2-5)计算,改正前的水平角中误差为9.0。由公式(2-3)列立误差方程。计算得到: ;
; ;同理由式(2-5)可知,改正后的水平角中误差为2.8。
;同理由式(2-5)可知,改正后的水平角中误差为2.8。
本仪器采用纸质黑白标靶进行角度检测时,得到的激光光束不垂直于扫描棱镜旋转轴的误差为9.5;棱镜旋转轴倾斜误差4'42.4。
由图4可知,在忽略基准仪器误差和标靶获取误差的情况下,该三维激光扫描仪在室外工作条件下,部分标靶水平角扫描精度略低于标称精度。经过测角常数改正后,该仪器水平角扫描精度明显提升,且符合标称精度要求。
5. 结论
本文通过建立三维激光扫描仪水平角检校平差模型、建立检校场和检校实验,以Leica TCA2003高精度全站仪为基准,对Leica ScanStation C10三维激光扫描仪的水平角进行了检校,得到其测角精度和改正参数。通过实测结果,可得到以下结论:
1) 在30~40 m的测量范围内,待检三维激光扫描仪,水平角测角内符合精度可以达到0.56;
2) 待检三维激光扫描仪在野外工作环境下,未经测角常数改正时,水平角测角精度部分超限,基本满足标称精度要求;

Figure 2. Black & white target and its point cloud model
图2. 黑白标靶及其点云模型

Figure 3. The internal Accuracy of 3D Scanner’s Horizontal Angle
图3. 扫描仪水平角内符合精度

Figure 4. The effect of 3D scanner’s horizontal angle correction
图4. 扫描仪测角改正前后水平角差

Table 1. The reference horizontal angle of total station
表1. 全站仪基准角度值
3) 根据本文提出的水平角检校模型,可以得出待检三维激光扫描仪的激光光束不垂直于扫描棱镜旋转轴的误差为9.5;棱镜旋转轴倾斜误差为4'42.4;
4) 待检三维激光扫描仪经过测角常数改正后,水平角测角精度明显提高,完全满足标称精度要求。
文章引用
蔡士毅,蔡 敏,汪 闽,张 奇,董 晨, (2015) 三维激光扫描仪水平角检校模型研究
Research of Model on the Horizontal Angle Accuracy of 3D-Laser Scanner. 测绘科学技术,02,21-26. doi: 10.12677/GST.2015.32004
参考文献 (References)
- 1. 郑德华, 雷伟刚 (2003) 地面3维激光影像扫描测量技术. 铁路航测, 2, 26-28.
- 2. 刘建坡, 李军杰, 黄继永 (2008) 三维激光扫描技术在露天矿测量中的应用. 科技信息, 22, 647-648.
- 3. 谢雄耀等 (2013) 基于地面三维激光扫描技术的隧道全断面变形测量方法. 岩石力学及工程学报, 32, 2214- 2224.
- 4. 郑德华, 沈云中, 刘春 (2005) 3维激光扫描仪及其测量误差影响因素分析. 测绘工程, 6, 33-34.
- 5. 徕卡测量系统 (2015) 徕卡ScanStation C10 All-in-one一体化高效扫描仪. www.leica-geosystems.com.cn
- 6. 徐忠阳 (2003) 全站仪原理与应用. 解放军出版社, 北京.
- 7. 刘保柱, 苏彦华, 张宏林 (2010) MATLAB 7.0从入门到精通. 人民邮电出版社, 北京.
- 8. (2011) 中华人民共和国住房与城乡建设部: 城市测量规范. 中国建筑工业出版社, 北京.