Mine Engineering
Vol.05 No.04(2017), Article ID:21936,9
pages
10.12677/ME.2017.54017
Research Progress and Application Field of Magnetic Particle Motion Mechanism in Magnetic Field
Xin Sun, Libin Zhang, Haokai Sun, Wenxuan Huang, Jiangang Ku
Zijin Mining College, Fuzhou University, Fuzhou Fujian

Received: Aug. 14th, 2017; accepted: Aug. 26th, 2017; published: Sep. 5th, 2017

ABSTRACT
In this paper, the progress of the motion mechanism of magnetic particles in magnetic field is reviewed by the aspects of magnetism, DLVO, equivalent surface current principle and magnetic dipole theory. The scientificity and limitations of these progresses are reviewed. The progress of these studies mainly includes the calculation of the interaction between the magnetic particles in the magnetic field under different theories, and the calculation of the magnetic energy between the magnetized magnetic particles. Focusing on the current hot issues, the use of magnetic substances to reduce drug side effects, drive microrobot, make magnetic grinding media, solve the problem of magnetic reunification was introduced and discussed. This article provides an overview and induction of the progress and achievements of the field in recent years, hoping to provide certain reference for future in-depth research.
Keywords:Magnetic Particles, Rotating, Magnetic, Field Mechanism, Application
磁场中磁性颗粒运动机理的研究进展及 应用领域
孙欣,章礼斌,孙浩楷,黄文萱,库建刚
福州大学紫金矿业学院,福建 福州
收稿日期:2017年8月14日;录用日期:2017年8月26日;发布日期:2017年9月5日

摘 要
本文从磁学理论、DLVO理论、地磁作用和等效表面电流原理、磁偶极子理论等方面综述了磁性颗粒在磁场中的运动机理的研究进展,评述了这些进展的科学性与局限性。这些研究进展主要包括在不同理论下磁场中磁性颗粒之间相互作用力的计算、被磁化的磁性颗粒间磁能的计算。重点围绕目前的热点问题,包括利用磁性物质减少药物副作用、驱动微型机器人、制作磁研磨介质、解决磁团聚问题等研究进行了介绍和讨论,旨在对近年来该领域的进展及获得的成果做一个概述和归纳,期望对将来的深入研究提供有一定借鉴。
关键词 :磁性颗粒,旋转,磁场,机理,应用

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
在交变的磁场中磁性颗粒之间会产生变化的力的作用,对其作用机理进行深入研究,可实现通过控制磁场变化而间接控制磁性颗粒的运动。基于磁性颗粒的这种特性,其在生物医疗领域减弱药物副作用,机械领域的磁致微型机器人和磁研磨技术以及矿业领域解决次团聚问题等有着巨大的应用潜力。
2. 磁场中磁性颗粒的运动机理研究进展
国内外学者对磁场中磁性颗粒间的作用力及运动机理进行了相关的研究,以库仑的磁荷假说和安培的环形电流假说为基础 [1] ,对磁场中两个磁性球形颗粒间的磁作用力(能)的计算进行了大量而有益的探索并给出了很多数学表达式。
Eyssa和Boom [2] 从磁学理论出发,给出了外加磁场中两个铁磁性颗粒之间的相互吸引力:
 (1)
(1)
式中: 为空穴和颗粒的退磁系数;
为空穴和颗粒的退磁系数; 为悬浮体的孔隙度,
为悬浮体的孔隙度, ,
, 为体积浓度;
为体积浓度; 为颗粒的磁化
为颗粒的磁化
强度, ;
; 为颗粒半径。
为颗粒半径。
J. Scvobda [3] (1981)在外磁场的作用下根据DLVO理论对矿物的顺磁性和抗磁性的相互作用能进行了系统计算,提出了两个被磁化的弱磁性粒子间的磁能计算式:
 (2)
(2)
式中: 为真空磁导率,
为真空磁导率, 分别为颗粒磁矩,
分别为颗粒磁矩, 为两颗粒之间距离。
为两颗粒之间距离。
Y. M. Eyssa [4] 等(1982)推导的外场中弱磁性颗粒间相互作用磁力(能)表达式:
 (3)
(3)
式中: 为颗粒磁化率;
为颗粒磁化率; 为磁感应强度;
为磁感应强度; 分别为两颗粒半径;
分别为两颗粒半径; 为两颗粒间距;
为两颗粒间距; 为作用方向与磁场方向间夹角。
为作用方向与磁场方向间夹角。
徐群 [5] (1984)根据地磁作用和等效表面电流原理对磁铁矿颗粒与赤铁矿颗粒之间的比磁力进行了探讨和推导,其数学表达式为:
 (4)
(4)
式中: 为铁磁性颗粒的剩磁;
为铁磁性颗粒的剩磁; 为颗粒中心到作用点的距离。
为颗粒中心到作用点的距离。
库建刚等 [6] 根据磁偶极子理论计算了在较均匀磁场背景下两磁性矿粒间的磁能:
 (5)
(5)
式中: 和
和 为两个矿粒的磁矩;
为两个矿粒的磁矩; 和
和 分别为真空磁导率和介质的相对磁导率;
分别为真空磁导率和介质的相对磁导率; 为两个点偶极子中心连线的单位矢量;
为两个点偶极子中心连线的单位矢量; 为两矿粒的间距矢量。
为两矿粒的间距矢量。
设两矿粒的磁偶极矩均为m时计算所得的磁力作用大小:
 (6)
(6)
式中: 为两矿粒中心连线与外磁场方向的夹角;
为两矿粒中心连线与外磁场方向的夹角; 和
和 分别为真空磁导率和介质的相对磁导率;
分别为真空磁导率和介质的相对磁导率; 为两矿粒的间距矢量。
为两矿粒的间距矢量。
关于磁的应用长期依靠经验,研究者从库仑的磁荷假说和安培的环形电流假说出发进行大量研究,使磁应用有理论依据。但是磁场中磁性颗粒相互作用的研究都是基于静态磁场中颗粒磁矩的唯一性进行的,而在旋转磁场中,颗粒的磁矩无论大小还是方向都是动态变化的,因此,上述研究对动态磁场中磁性颗粒的分析具有局限性。
3. 旋转磁场中磁性颗粒的运动机理研究进展
3.1. 生物医疗领域
药物是最常见的治疗方法之一,但是药物通过血液循环在除目标部位之外的正常组织中扩散就会产生药物的副作用,特别是药效剧烈的药物如抗癌药物等。解决这个问题的关键一方面是如何将药物准确送达病发处,另一方面是药物的准确释放,减少对健康组织的影响。
由于磁性颗粒的运动可以被磁场精确的控制,并且在磁场下可以进行能量转换,所以在医疗领域磁性药物或磁性药物载体的研究就显得非常重要了。Mishima等对在旋转磁场条件下的粒子在毛细管血管中运动轨迹进行动力学模拟,并进一步研究了铁磁颗粒在血管模型中的积累实验 [7] 。M. Chuzawa, F. Mishima更进一步研究了在旋转磁场下磁性颗粒在的器官模型中的累积 [8] ,实验原理图如图1所示。
利用药物载体准确释放药物主要思路是采用磁性水凝胶作为药物载体,通过磁场将药物送达病发处,之后改变外加磁场强度和旋转频率,使磁能转化为动能进而转化为热能使水凝胶熔化释放出药物。Ke Hu制作了一种磁颗粒均匀分布的磁性水凝胶,并验证其在交变磁场下的磁热效应是可控的 [9] 。实验过程示意图以及实验结果如图2所示。
Yu Chengbc1等发现了在低频旋转磁场下,盘形坡莫合金磁性粒子可实现自旋的现象,并研究了这种现象在体外和体内破坏胶质瘤细胞的可能性 [10] 。由于磁力作用,细胞内的纳米磁体存在与旋转磁场磁极对准的作用趋势并产生强机械力,这种机械力可以破坏癌细胞的结构诱导细胞程序性死亡。实验结果

Figure 1. (a) A schematic view of the experiment of a model organ on the high-temperature superconducting bulk magnet; (b) A photograph of the experiment of a model organ on the high-temperature superconducting bulk magnet
图1. (a) 模拟器官在旋转高温超导磁块下的药物积累;(b) 模拟器管和高温超导磁块的实物图片
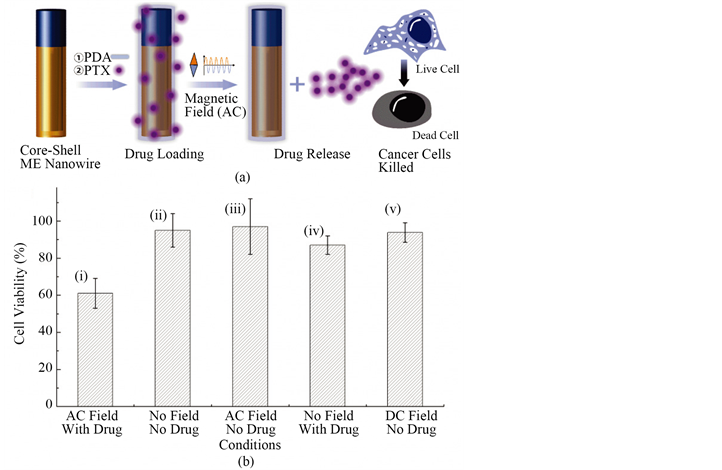
Figure 2. (a) Schematic diagram of precise release of the drug in the magnetic hydrogel. (b) Experimental results of alternating magnetic field controlled delivery drug release, compared with control experiments
图2. (a) 图显示水凝胶中药物的精确释放;(b) 交变磁场控制递送药物释放的实验结果,与对照实验的对比
显示,磁场治疗成功减少小鼠脑肿瘤大小,并增加小鼠携带颅内胶质瘤异种移植物的生存率,并且没有不良的副作用。
所有的试验结果都验证了磁性药物或磁性药物载体在药物方面应用的可能性。
3.2. 机械领域
由于在磁场中磁性颗粒可受到非接触作用力,所以其原理在磁致动式微型机器人和磁研磨技术都得到一定的应用。
磁致动式微型机器人由于可以采用非接触式驱动,所以结构尺寸可微小化,器件精密,可进行微细操作,而且可以进入人类无法进入的危险或狭窄区域,磁致动式微型机器人已经被用于各种应用领域。所以磁制动原理研究也就显得尤为重要了。
Jang等设计了一种有由旋转磁场制动的钻状螺旋磁粒机器人,并利用这种机器人来清理人的血管 [11] 。
Qiang Fu等设计了一种具有由电磁致动系统驱动的混合运动的新型磁致动混合微机器人 [12] 。环型永磁体嵌入在混合微型机器人中作为由3轴亥姆霍兹线圈产生的旋转磁场驱动的致动器。它由两个运动机制组成。一种是通过旋转其本体使螺旋片产生向前的动力。另一个是通过振动它身体尾部的翅片进行运动,结构见图3。由于在混合微型机器人内部仅使用一个永磁体,可以分别控制两个运动而没有任何干扰。混合微机器人可以改变其两个运动,实现多自由度运动,实验中控制机器人原理如图4所示。在管中进行的验证实验结果表明,可以通过调整磁场变化频率来控制移动速度,并且可以通过改变磁场方向来控制运动方向。
Kathrin E.仿照细菌的鞭毛制作了一个带螺旋装置的磁性颗粒,结构如图5所示。这样使得颗粒在旋转磁场下会得到推进的动力,颗粒实现在组织和体液间游动 [13] 。
为了使微型机器人完成更复杂的动作,机器人的结构就会更复杂,机器人构件在旋转磁场中的力学特性以及构件间的相互作用都会成为磁力微型机器人发展的核心技术。加强对磁性颗粒在旋转磁场中作用机理的研究,会促进磁力机器人向多功能复杂化发展。
机械部件的表面质量将直接影响其使用寿命、可靠性等因素。据统计,如果模芯和模腔的表面质量可以提高一级,模具寿命将提高50%。然而,模具的形状变得越来越复杂,并且其弯曲表面所占的比例在不断增加,高硬度和光滑表面抛光效率使得抛光工作变得非常困难,如航空发动机中所使用的钛合金弯管在加工时其内表面会产生微裂纹、褶皱等缺陷,用传统的研磨工艺难以实现对弯管内表面的抛光处理。
磁力抛光是利用其独特的磁场分布,产生强劲平稳的磁感效应,使磁性磨料与工件进行相对运动,从而达到去除毛刺,抛光,洗净等多重效果 [14] 。精细的磁性粒子组成的抛光工具是柔性的,操作起来相对比较容易 [15] 。
由于磁力抛光采用非接触式传动,可以在封闭,狭小的环境工作,尤其对于加工表面复杂的、没有规律的、没有旋转表面的构件时,磁力抛光比传统抛光有很多优势。
目前关于磁磨料抛光的研究进展。Lee HY等人研究表明行磁性磨料的行星式运动(如图6所示)可以产生径向加速度,这加强了施加在工件表面上的法向力,进而增强了磨料的切割功率及其抛光能力 [16] 。
在图7所示的磁力研磨原理下,邓超和Wang Y等对磁研磨法加工钛合金弯管内表面的磁性研磨颗粒的受力情况进行了的分析,并通过详细的试验研究得出:钛合金弯管内表面经过研磨后,原有的微裂纹、褶皱等缺陷得到明显改善,验证了磁研磨法对钛合金弯管内表面的研磨抛光起到的良好效果 [17] [18] 。
磁性磨料也可以制成磁性抛光液,磁性抛光液的粘度和硬度在不同磁场下会发生变化,当在抛光液中加上旋转磁场时,磁性抛光液在装置中旋转,把工件固定在液体中的适当位置,磁性流体相对于工件

Figure 3. (a) Overall view of the robot. (b) Cross section
图3. (a) 微型机器人整体结构图。(b) 微型机器人切面图
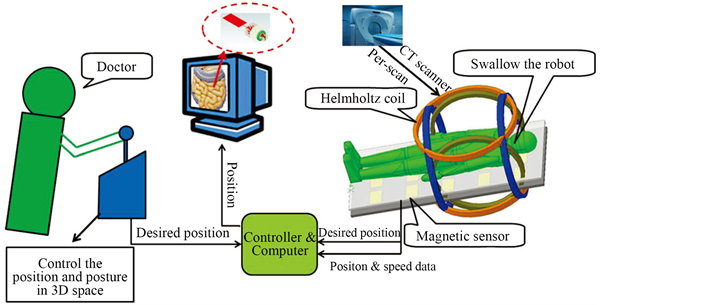
Figure 4. Working principle of magnetic robot
图4. 磁力机器人工作原理

Figure 5. (a) Bacterial helical flagella propulsion. (b) Helical micromachines propulsion
图5. (a) 细菌螺旋鞭毛推进。(b) 螺旋微型推进器

Figure 6. (a) Polishing motion of planetary motion. (b) Polishing motion of magnetic abrasive finishing
图6. (a) 行星运动的研磨介质。(b) 磁研磨示意图
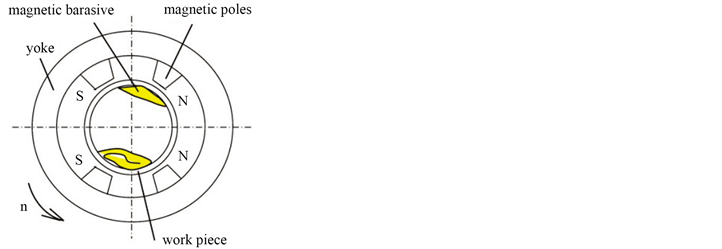
Figure 7. Schematic diagram of the rotating motion device
图7. 磁力研磨加工原理图
旋转和移动,磁性流体与工件表面之间的摩擦具有精加工效果。Zhengcai Wan等研究了自制实验室抛光机工作时工件产品粗糙度度和位置的关系 [19] 。实验结果还表明,旋转磁性抛光液可用于工件的超光滑处理中的抛光,这比抛光磨料单独降低表面粗糙度要好得多。
磁研磨技术将来会向超光滑研磨和研磨对象精细复杂化方面发展,只有深入研究磁性颗粒及颗粒群在动态磁场中的运动原理,才能更精确的控制磁性颗粒进而可以加工更精细的机械部件。
3.3. 矿业领域
磁团聚是磁性矿粒受到磁场磁化作用或磁性矿粒本身具有剩磁而相互吸引并产生团聚现象,它对磨矿、分级、浓缩及过滤作业具有很大影响。目前针对磁团聚的研究,多数停留在经验层面,对磁团聚的形成速度、磁团聚的结构、磁团聚内部结合强度及磁团聚分散技术等有关机理的研究相对薄弱,远没有形成统一的理论体系。
库建刚等 [20] 以磁偶极子模型得出的磁力作用数学表达式计算两磁性矿粒在水中接触所用的时间。在磁偶极子模型为基础,分析了强磁性矿粒在矿浆中受到的各种作用力,得出了磁偶极子力和流体阻力是影响磁链形成的主要因素的结论,并采用迭代过程Verlet速度算法,建立了强磁性矿粒的动力学模型,模拟了在磁场作用下磁性矿粒从单颗粒到链状结构的形成过程。基于磁场分布的磁偶极子理论,详细计算了作用在磁性矿物颗粒的磁分离过程的力量和宏观动力学模型建立了磁团聚粒子群。提出了对动态模型的计算方法,以及二维动态过程之间的相互作用的磁性矿物粒子模拟。
4. 结论及展望
本文综述了在不同理论下磁场中磁性颗粒之间相互作用力的计算、被磁化的磁性颗粒间磁能的计算,评述了这些进展的科学性与局限性。概述和归纳了磁性物质在生物医疗、机械和矿业等领域的主要应用。
目前对于磁颗粒在磁场中运动机理的研究多停留在经验层面,对磁性颗粒定量,定向控制等的研究相对薄弱,对磁性颗粒无接触控制远没有形成一套成熟的控制体系。虽然,现在各领域都在进行研究并且都有一定应用,但都需要大量试验经验,缺少准确的理论指导,尤其是在动态磁场下精确控制磁性颗粒的运动轨迹。
相信通过对动态磁场中磁性颗粒运动机理的进一步研究,可实现对磁性颗粒无接触式定量和定向的控制。
基金项目
国家自然科学基金资助项目(51674091);大学生创新创业训练计划项目(201610386030)。
文章引用
孙 欣,章礼斌,孙浩楷,黄文萱,库建刚. 磁场中磁性颗粒运动机理的研究进展及应用领域
Research Progress and Application Field of Magnetic Particle Motion Mechanism in Magnetic Field[J]. 矿山工程, 2017, 05(04): 114-122. http://dx.doi.org/10.12677/ME.2017.54017
参考文献 (References)
- 1. 赵凯华, 陈熙谋. 电磁学[M]. 北京: 高等教育出版社, 1978.
- 2. Eyssa, Y.M. and Boom, R.W. (1976) Magnetic and Coagulation Forces on a Suspension of Magnetic Particles. International Journal of Mineral Processing, 3, 1-8. https://doi.org/10.1016/0301-7516(76)90010-7
- 3. Svoboda, J. (1981) A Theoretical Approach to the Magnetic Flocculation of Weakly Magnetic Minerals. International Journal of Mineral Processing, 8, 377-390. https://doi.org/10.1016/0301-7516(81)90023-5
- 4. Parker, M.R., Kleef, R.P.A.R.V., Myron, H.W., et al. (1982) Particle Aggregation in Colloids in High Magnetic Fields. Journal of Magnetism & Magnetic Materials, 27, 250-256. https://doi.org/10.1016/0304-8853(82)90085-3
- 5. 徐群. 包头铁矿选择性脱泥工艺中磁力团聚机理的研究[D]: [硕士学位论文]. 北京: 北京矿冶研究总院, 1984.
- 6. 库建刚, 张文彬, 刘殿文. 强磁性矿粒磁链形成机理分析[J]. 金属矿山, 2007(6): 30-33.
- 7. Mishima, F., Nakagawa, K., Chuzawa, M., et al. (2013) Precise Control of the Drug Kinetics by Non-Invasive Magnetic Drug Delivery System. Physica C Superconductivity & Its Applications, 484, 120-124. https://doi.org/10.1016/j.physc.2012.03.070
- 8. Chuzawa, M., Mishima, F., Akiyama, Y., et al. (2011) Drug Accumulation by Means of Noninvasive Magnetic Drug Delivery System. Physica C Superconductivity & Its Applications, 471, 1538-1542. https://doi.org/10.1016/j.physc.2011.05.233
- 9. Hu, K., Sun, J., Guo, Z., et al. (2015) A Novel Magnetic Hydrogel with Aligned Magnetic Colloidal Assemblies Showing Controllable Enhancement of Magnetothermal Effect in the Presence of Alternating Magnetic Field. Advanced Materials, 27, 2507-2514. https://doi.org/10.1002/adma.201405757
- 10. Yu, C., Muroski, M.E., Petit, D.C.M.C., et al. (2016) Rotating Magnetic Field İnduced Oscillation of Magnetic Particles for in Vivo, Mechanical Destruction of Malignant Glioma. Journal of Controlled Release, 223, 75-84. https://doi.org/10.1016/j.jconrel.2015.12.028
- 11. Jang, G.B., Jeon, S., Nam, J., et al. (2015) A Spiral Microrobot Performing Navigating Linear and Drilling Motions by Magnetic Gradient and Rotating Uniform Magnetic Field for Applications in Unclogging Blocked Human Blood Vessels. IEEE Transactions on Magnetics, 51, 1-4. https://doi.org/10.1109/TMAG.2015.2436913
- 12. Fu, Q., Guo, S., Yamauchi, Y., et al. (2015) A Novel Hybrid Microrobot using Rotational Magnetic Field for Medical Applications. Biomedical Microdevices, 17, 1-12. https://doi.org/10.1007/s10544-015-9942-0
- 13. Peyer, K.E., Tottori, S., Qiu, F., et al. (2013) Magnetic Helical Micromachines. Chemistry, 19, 28-38. https://doi.org/10.1002/chem.201203364
- 14. Kwak, J.S. (2009) Enhanced Magnetic Abrasive Polishing of Non-Ferrous Metals Utilizing a Permanent Magnet. International Journal of Machine Tools & Manufacture, 49, 613-618.
- 15. Singh, D.K., Jain, V.K. and Raghuram, V. (2005) On the Performance Analysıs of Flexıble Magnetıc Abrasıve Brush. Machining Science & Technology, 9, 601-619. https://doi.org/10.1080/10910340500398217
- 16. Lee, Y.H., Wu, K.L., Bai, C.T., et al. (2015) Planetary Motion Combined with Two-Dimensional Vibration-Assisted Magnetic Abrasive Finishing. International Journal of Advanced Manufacturing Technology, 76, 1865-1877. https://doi.org/10.1007/s00170-014-6370-x
- 17. 邓超, 韩冰, 陈燕. 磁研磨法对钛合金弯管内表面的抛光研究[J]. 航空制造技术, 2015(3): 61-63.
- 18. Wang, Y. and Hu, D. (2005) Study on the İnner Surface Finishing of Tubing by Magnetic Abrasive Finishing. International Journal of Machine Tools & Manufacture, 45, 43-49.
- 19. Wang, Z.C., Lu, Z.X., Chen, S.F., et al. (2012) Experimental Investigation of Polishing Character of Rotating Magnetic Polishing Fluids. Applied Mechanics & Materials, 201-202, 1096-1101. https://doi.org/10.4028/www.scientific.net/AMM.201-202.1096
- 20. 库建刚, 陈辉煌, 何逵, 等. 强磁性矿粒在磁选过程中的受力分析及动力学模拟[J]. 中南大学学报(自然科学版), 2015(5): 1577-1582.