Journal of Sensor Technology and Application
Vol.
10
No.
03
(
2022
), Article ID:
54200
,
9
pages
10.12677/JSTA.2022.103059
搬运好帮手
——一款能自主识别物件的搬运机器人
张婷逸,毕徐府
绍兴文理学院,浙江 绍兴
收稿日期:2022年6月13日;录用日期:2022年7月20日;发布日期:2022年7月28日

摘要
这是一款能自主识别物件并搬运指定物件的机器人,是能够在解放人的同时提高工作效率的搬运好帮手。装置的核心是单片机控制系统、寻迹模块和机械臂模块,其次还包括红外距离传感器、爪钩、触摸屏、电池模块和若干传输控制线等元器件。该搬运机器人在接收到任务指令后,通过灰度条传感器依次扫描地面上的循迹线,按照循迹线所在的既定路线行走;用摄像头对不同形状、颜色、大小的物体进行图像识别判断是否为所需货物;用单片机驱动板控制舵机转动及红外距离传感器,实现对不同形状的物品的精确抓取。该机器人可以用在物流仓库、网购商城、医院、工厂、果园等涉及到物品识别与搬运的场所中使用。该装置操作简单、智能且精准,可极大地减少人力物力的消耗,提高工作效率,解决传统运输模式“速度慢、效率低、损耗大”的难题。
关键词
自主识别,精准取物,高效搬运

Good Handling Assistant
—A Handling Robot Capable of Self Identifying Objects
Tingyi Zhang, Xufu Bi
Shaoxing University, Shaoxing Zhejiang
Received: Jun. 13th, 2022; accepted: Jul. 20th, 2022; published: Jul. 28th, 2022

ABSTRACT
This is a robot that can identify objects and carry designated objects independently. And it is a good carrying helper that can liberate people and improve work efficiency at the same time. The core of the device is a single-chip microcomputer control system, a tracking module and a manipulator module, followed by an infrared distance sensor, a claw hook, a touch screen, a battery module and several transmission control lines. After receiving the task command, the handling robot scans the tracking line on the ground in turn through the gray sensor, and walks according to the established route where the tracking line is located. Use the camera to recognize the images of objects with different shapes, colors and sizes to judge whether they are required goods. The rotation of the steering gear and the infrared distance sensor are controlled by the single-chip microcomputer driving board to realize the accurate grasping of objects with different shapes. The robot can be used in logistics warehouses, online shopping malls, hospitals, factories, orchards and other places involving the identification and handling of goods. The device is simple, intelligent and accurate, which can greatly reduce the consumption of human and material resources, improve work efficiency, and solve the problem of “slow speed, low efficiency and large loss” in the traditional transportation mode.
Keywords:Autonomous Identification, Accurate Retrieval, Efficient Handling

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 作品背景
随着科学技术的发展,我们的生活中多了智能机器人的身影,智能化成了许多地方的标签,工作效率在智能化的加持下有了大幅度的提高,人力物力上的消耗有了明显的减少。目前搬运机器人在国内大多被应用于仓储系统,而其中应用最广泛的是流行业,但是这些应用场景中也存在着一些问题。像学校、工厂、网络商城等场所的货物搬运过程较为复杂,有耗时耗力、效率低的问题,而我们研制的这款能自主识别物件的搬运机器人在国内外还没有在上述的场所里应用,因此,这款机器人有较高的可行性和创新性,可以在提高效率的同时,节省人力资源 [1]。
智能应用型搬运机器人技术上的突破能为促进本国的经济发展起到了重要作用,给社会带来了重大影响。随着经济社会的发展,提高生产效率、降低时间成本成为了趋势,这也是人类本身在不断前进中的一个需求。人们在不断认识自然、探索自然过程中,意识到可以运用具有搬运功能的机器人在复杂、繁重、机械的工作中代替人力,解放人,这也是科技发展的一个最终结果,为人类服务。
智能搬运机器人在科技发展的大背景下逐渐在各个领域中崭露头角,在不同的场景下,发挥自身的作用。但由于其存在制作成本较高、受到使用场地的限制等问题,目前还无法在生活场景中应用,尽管如此,它的存在还是给人民群众带来了很大的便利,一方面提高了工作效率,另一方面减少了时间成本。经过市场调查,我们还发现了具备搬运功能的智能机器人有着广阔的发展空间,在许多领域它的应用还是比较模糊,定位还不够清晰,因此我们开发与研制的能够自主识别物件的搬运机器人对这些领域而言有着很大的益处,能够填补市场空白,满足实际需要。同时,我们还发现了在网络商城 [2]、工厂、快递货舱、校园等多数场合中的人工搬普遍存在着一些问题,比如:效率不高、易出错、存在危险等,而这是我们亟待解决的问题,需要在提高工作效率的同时,减少人力成本,克服工作中出现的各类错误、降低风险。
2. 装置单元
2.1. 结构单元
2.1.1. 简介
整个系统总体上分为自主导航模块、图像识别模块、电机驱动模块、人机交互模块、机械臂抓取模块等几大部分,通过微控制器来协调各部分工作。
2.1.2. 单片机
单片机驱动板通过驱动电机转动来使轮胎转动驱动装置运行。同时用于接收传感器反馈得来的信息来控制装置的方向,并控制舵机转动来控制机械臂和钩爪的方向和角度、机械臂完成拿取任务和携带小推车的任务。单片机驱动板来识别物体的属性信息和个数,通过信息比对反馈确定物体是否所需以及控制所拿物体的个数。
单片机主控板是控制核心,直接或间接控制所有元件的工作。
2.1.3. 传感器
模块三个相邻的传感器与地图黑线宽度距离相等,用于装置循线行走,装置能够沿着指定的路线和方向前进至抵达目的地。
红外距离传感器,在取物前发射出一束红外光,在照射到物体后,反射到传感器接收信号,经信号处理器处理后计算出物体的距离。实现机械臂精准取物。
2.1.4. 抓钩
爪钩上有一些微小且自然弧度的锯齿,能够增加抓取过程的摩擦力,但是不会伤害物品,可增加取物的稳定性。
2.1.5. 外壳
外壳主题为亚克力板,板上嵌有触摸屏用于人机交互,且自身可塑性强,减少外形需求难度。
2.2. 工作原理与逻辑流程
2.2.1. 工作原理
连接好装置并安装好程序,启动程序后,初始化参数。
1) 操作人员接收到指令后,搬运物品的信息传输给搬运机器人,机器人在数据库里查询到货物的具体信息及货物的货架位置。
2) 搬运机器人接收指令后,通过灰度条传感器一一扫描地上的循迹线,按照循迹线所在的既定路线行走对物品进行遍历识别及抓取。
3) 电机驱动车轮同时配合循迹模块的反馈信息将机器人移动至指定物品坐标。
4) 摄像头进行图像识别得出当前可标签物品的信息,如果符合任务列表的要求即抓取反之跳过抓取动作。随后前往下一个工作坐标循环以上流程,将抓取的物品堆放至小推车中。
5) 装置将货物放入小推车后,再回到初始位置。当搬运机器人将所取货物放入小推车后,完成放置。
2.2.2. 功能说明
我们设计要求机器人应具备以下四项功能:自主导航功能、车体定点移动功能、图像识别功能、机械臂抓取功能。使得该机器人可以在接收订单指令后,进行物体识别并抓取,最后配送到指定需求地点。
自动导航功能:采用灰度条传感器来扫描场景上的循迹线,通过主控板控制单片机带动轮胎转动,使机器人能按照指定的方向和路线自动往返 [3]。
车体定点移动功能:考虑到机器人需要多路PWM驱动直流电机和多个舵机,MCU芯片选用TMS320F28335在满足高速运算的情况下可同时输出多组PWM。电机选用得科技术高速电机,配合前后两组五路循迹模块实现车体定点移动功能。
图像识别功能:利用HUSKYLENS人工智能摄像头配合一个红外距离检测传感器,实现对物品的识别,然后通过串口通信将结果反馈给主控板。
机械臂抓取功能:选用6个舵机机械臂,根据场地中货架的高度对部分关节进行了延长,后期通过调整规定每个舵机的固定角度进而实现机械臂抓取动作的实现。连接小推车的连接杆通过2个舵机实现一个可移动的倒钩抓手用于控制小推车位置。电池选用22.2 V锂电池,通过20 V/20 A稳压模块为电机供电,再通过5 V稳压模块分别为舵机和控制板供电。
2.2.3. 逻辑流程图
在设计这款能自主识别物件的搬运机器人时,需要考虑机器人的识别、运动以及可携带的物件数量,其主要的逻辑流程图如图1所示。

Figure 1. Logic flow chart
图1. 逻辑流程图
3. 机械设计
小车设计大小为20 cm × 30 cm,全车4个车轮轮距约22 cm,机械臂共有6个舵机控制全长约55 cm,连接勾有2个舵机。
3.1. 布局设计
车轮随电机分布安装在底盘四个角落,车头车尾分别安装一组循迹模块,机械臂安装在车头部分,车尾分为两层第一层放置电池、降压模块、电机驱动板等质量较大的模块,第二层只放置主控板。
3.2. 选材设计
车底选用5 mm亚克力板,在保证绝缘性和硬度的需求上可加工性也较强。
车轮选用实心橡胶材质,在保证抓地力的同时能更容易控制精度。
机械臂选择带云台的多自由度舵机组,通过改装前置握爪满足对各种物品的抓取要求。
主控板在已有的DSP28335核心板的基础上自主制作电路板,将所需的模块接口引出并且将舵机控制板进行集成。
电机驱动板选用得科科技两路大电流直流电机驱动板,将MCU产生的PWM信号放大至峰值20 V提供给电机。
巡线模块选用5路循迹,地图黑线宽度与模块三个相邻的传感器距离相同,以此保证正常行驶可以灵敏的感知行进的方向变化。
电池模块选用22.2 V锂电池为机器人提供充足能量,7.8 V锂电池单独为机械臂供电,防止机械臂的大电流影响其它模块的正常工作。根据各个模块对电源的不同要求,分别选用三个不同稳压器,20 V 20 A稳压器为电机供电,5 V大电流为机械臂舵机组供电,5 V小电流为主控板供电。
4. 电路设计
拟实现搬运机器人由自主导航模块、电机驱动模块、图像识别模块、机械臂抓取模块及电源模块构成。具体各模块功能描述如下:
自主导航模块:该模块由机体的灰度条传感器,结合场景上的循迹线构成,用来实现机器人自主导航的功能。
电机驱动模块:该模块由2个五路循迹模块、电机驱动板和4个直流电机构成,用来实现车体定点定位移动功能。
摄像头模块:该模块由HUSKYLENS人工智能摄像头和红外距离传感器构成,实现图像识别功能。
机械臂模块:该模块由6个舵机和机械臂构成,实现机械臂抓取功能。
连接杆模块:该模块由2个舵机和倒钩抓手构成,实现机械臂抓取功能。
人机交互模块:该模块由蓝牙通讯模块构成,用来实现调试信息的反馈和离线调试功能。
电源模块:该模块由22.2 V锂电池、20 V稳压器和5 V降压模块构成,用来实现对各模块供电功能。
4.1. 电机驱动模块电路设计
MCU产生的PWM信号连接至电机驱动板进而驱动电机。同时将机器人两侧的电机分别并联,实现一对PWM输出控制一侧2个电机的同时运转。两个循迹模块对应MCU的10个IO输入口,从而读取模块的状态。
4.2. 电源模块电路设计
由于直流电机、舵机和主控板的供电需求不同,分别为各个模块进行降压调节。电机供电采用大功率大电流稳压模块将电源电压稳定在20 V。舵机输入电压与控制板输入电压相同,但舵机的功率较大,于是分别采用不同的稳压模块为两者分别供电。
4.3. 主控板电路设计
主控板主要为各个模块提供物理接口,并完成控制、分析和决策等功能。电源输入后首先连接1117-5稳压芯片保证自身电压稳定在5 V,利用NMOS实现防电源反接功能。舵机控制、电机控制、寻迹模块接口、OLED接口及蓝牙接口均集成在主控板上。
5. 控制算法与软件实现
软件实现主要分成决策判断、运动控制及图像识别并抓取,其中运动控制和图像识别并抓取为决策判断部分提供服务,使搬运机器人可以完成决策。具体各部分功能描述如下。
5.1. 决策判断
该部分为软件程序的整体框架,模拟生活中的一个场景,将物品所在区地图分为货架区、一个出发区、一个目的区,根据取货指令,行迹至指定区识别并取回指令物品。小车在前往搜索物品或出发去目的区时始终借助自主导航,采取规定动作完成抓取和放置入小推车中。当商品完成一定量抓取后,机器人随后行至目的区,到达指定位置后摄像头进行图像识别得出目的区物品堆放情况,将物品安全堆放到目的区,完成堆放后,机器人自行返回至出发区循环上面的步骤并执行任务列表的下一条指令。
5.2. 运动控制
MCU通过产生两组PWM控制左右两侧电机实现机器人基本的前后行进、左右旋转。利用量化后的循迹模块数据进而改变两组PWM占空比从而实现循迹功能,旋转时通过判断循迹模块的高低时序,进而判断车体是否完成转向 [4]。
5.3. 图像识别并抓取
当机器人到位后向摄像头控制板发送指令,首先会调用红外测距传感器检测是否有物体存在,若无东西存在直接返回无信息,若有则进一步通过摄像头检测物品的信息,如果是需要抓取的物体则向主控板返回抓取信息,如果满足要求则通过机械臂完成抓取动作,否则放弃抓取进入下一个坐标点。流程如图2所示 [5]。
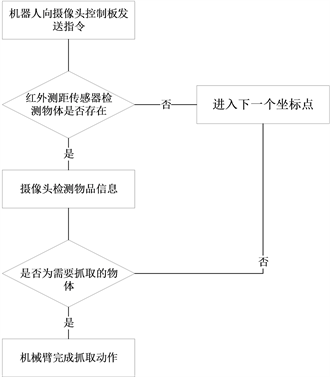
Figure 2. Flow chart of image recognition and capture
图2. 图像识别抓取流程图
6. 模块参数与设计理论值计算
6.1. 主控板
STM32 [11]单片机是基于ARM® Cortex® M处理器内核的32位微控制器,运算速度是51单片机的几十倍,外围接口多且功能强大,片上资源丰富,STM32单片机程序都是模块化的,接口相对简单,并提供各种易于上手的软硬件辅助工具。
6.2. 舵机
驱动模块设计主要考虑曲柄滑块机构的扭矩参数,选取扭矩为12 Kg/cm (120 N/cm)的舵机。
6.3. 直流电机
我们使用的是545直流减速电机24 V 12 V大扭矩功率小电动机微型齿轮调速低速马达。
7. 创新点
7.1. 自动识别
我们的智能搬运机器人能够根据搬运指令,通过摄像头和红外距离传感器的配合,针对不同的形状、颜色、大小以及所贴标签信息去辨识不同的物件,能够精准的识别各种状况下的物件,有助于解决更大范围,更多场景下的搬运工作。
7.2. 灵活抓取
我们的智能搬运机器人上设有六个舵机机械臂,结合现实场景,很多物品的存储空间的海拔维度较高,这样的设计能够应对较高点的抓取工作,再结合巧妙的抓钩设计,拥有多个小型光滑弧度锯齿,增加摩擦力的同时还不会破坏物品,能够有效抓取不同形状的物件,保证抓取过程的稳定性。
7.3. 定点搬运
我们的智能搬运机器人能够自动导航搬运,我们只需要给机器人传递指令,搬运指令加上指定路线,能保证机器人工作过程有条不紊,最终也能自主将物件运送到指定地点,省时省力有效率。
8. 实例演示
我们尝试制作了这款能自主识别物件的智能搬运机器人,如图3所示,其具备文章上述提到功能,并设计了模拟搬运场景对这款机器人进行了测验,发现存在以下问题。由于每次所搬运的物件不同,因此要求抓手力度适中,在保证夹持物件不掉落的情况下,要尽可能减小物件所受的力,保护搬运物品,避免造成经济损失。经测验,此款试验机器人虽然在抓取力度、搬运速度上有所欠缺,但能较好地集自动识别、灵活抓取、定点搬运等功能于一体,能够完成预期的工作,并能保证效率。
同时智能系统的方向识别也是此款机器人可进行升级的方向。在测试的过程中为了要避免机器人碰撞障碍物和调整机器人自身的姿态,我们尝试在人工智能的基础上增加语音识别,使得机器人更加得智能化,在原本的基础上可以更加的灵活运用自己机能本身。也为搬运机器人在其他领域的更好应用提供了一个升级调整的方向。
9. 应用前景
9.1. 物流行业分拣
传统意义上的搬运机器人,其形式较为老套,模式较为固定,多为叉车式、牵引式等,车体体积大、
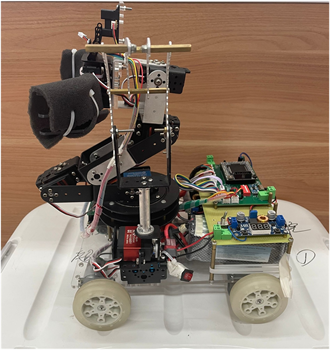
Figure 3. Handling robot capable of recognizing objects
图3. 能识别物件的搬运机器人
占用空间大,导致其应用场景受到限制,在要求较高的现代物流中很难起到高效的作用。同时,传统的搬运机器人需要借助于导引带来实现运动的功能,在仓库进行调整的过程中做出相应的改变需要较高的成本。因此,其在要求愈发严格的现代物流环境中,不能发挥出很好的作用。而我们的能自主识别物件搬运机器人形式新颖,结构科学,不受引导带的限制,具有自主循迹、导航的功能,将所运输的物流件经自主识别后分拣出来,实时收集周边环境数据做出相应的分析处理,计算行径路线,规避障碍,将物件运输到指定位置,完成搬运。可有效降低物流分拣搬运的成本,解放人力,同时搭配先进的运输分流系统,可进一步完善物流体系,使现代物流向着更加高效、精准的方向发展,具有很高的研究价值和社会社会效益 [6]。
9.2. 网购商品配送
随着网购规模逐年增加,传统的依靠人力的配送模式已难以满足配送需求。由于网购生鲜配送时效性强、需求随机性高、规模逐年增大等特点,导致了人力配送难以精准效应网购生鲜配送需求,造成了配送效率低下、人力成本高昂、安全隐患多等问题。与此同时,我国在无人配送领域的政策不断完善,为无人配送的应用落地提供了政策支持。在《交通强国建设纲要》中,明确提到要“积极发展无人机(车)物流递送”。我们的搬运机器人可以在接收并识别订单后,将所需商品分拣出来并放到购物篮中,由控制系统对机器人进行路径选择和规划,并派送到相应的需求点。可有效适应网购配送的时效性强、需求随机性高、规模大的特点 [7]。
9.3. 医疗物资输送
疫情爆发后,医疗物资短缺成了亟待解决的问题。而造成这一点的重要原因在于受疫情影响,运输、配送的效率在很大程度上受到了限制,因此,提高各项工作中的效率,是解决问题的根本途径。在这一过程中人工搬运存在一些无法弥补的问题,一方面在疫情影响下要控制人员密度,另一方面人工搬运的工作效率不高。我们设计的这块能自主识别物件的搬运机器人可用于医疗物资的搬运场景,提高工作效率。同时,这款机器人也可以在更多的类似场景进行搬运工作,如医院、隔离区等。它能够在较为复杂的环境中自主识别所需搬运的物件,在导航模块的加持下,将物件递送到制定区域。
9.4. 其他
我们的搬运机器人可广泛应用于物流行业分拣、网购商品配送、医疗物资输送、工厂企业搬运。除此之外,我们的机器人还可被升级开发用于中药抓取、果蔬采摘、海产品水下捕捞、家庭服务等场景。
文章引用
张婷逸,毕徐府. 搬运好帮手——一款能自主识别物件的搬运机器人
Good Handling Assistant—A Handling Robot Capable of Self Identifying Objects[J]. 传感器技术与应用, 2022, 10(03): 482-490. https://doi.org/10.12677/JSTA.2022.103059
参考文献
- 1. 李爽, 张志勇, 于跃, 杨威, 赵航. 智能应用型搬运机器人设计[J]. 科学技术创新, 2021(22): 191-192.
- 2. 陆淼嘉, 黄承媛, 滕靖. 基于多智能体的网购生鲜无人车配送调度仿真[J/OL]. 系统仿真学报, 1-13, 2021-08-22.
- 3. 禅翔, 贺凯鑫, 郭焕萍. 智能物料搬运机器人的研究与实现[J]. 电子世界, 2021(8): 206-207.
- 4. 马少华, 马建民, 刘振东, 车家琪, 李慧, 靳纪军, 张成键. 智能物料搬运机器人教学实验平台设计与开发[J]. 实验技术与管理, 2021, 38(3): 120-125.
- 5. 郭井宽. 搬运机器人控制系统的设计及界面功能开发[J]. 机械制造, 2021, 59(6): 46-51.
- 6. 卜晟哲, 利华志, 彭博齐, 张声岚. 基于STM32的搬运机器人方案[J]. 包钢科技, 2021, 47(2): 85-88.
- 7. 赵皎云. 高济医疗: 打造智能高效的医药零售物流中心[J]. 物流技术与应用, 2021, 26(1): 74-77.