Pure Mathematics
Vol.
12
No.
04
(
2022
), Article ID:
50686
,
8
pages
10.12677/PM.2022.124074
基于事件驱动多智能体一致性控制
佟洋洋,周峰*
沈阳工业大学,理学院,辽宁 沈阳
收稿日期:2022年3月16日;录用日期:2022年4月18日;发布日期:2022年4月25日

摘要
本文研究了一类非线性网络化多智能体系统的事件驱动控制问题。为了合理利用网络资源,减少智能体间冗余的数据传输,设计了一种新的事件驱动控制方案,这一驱动方案中数据传输的时间间隔由采样数据决定,可以避免Zeno现象,提高系统控制性能。同时考虑了数据传输时时间延迟的影响。结合Lyapunov稳定性理论等相关定义和引理,得到了使多智能体系统趋于一致的一个充分条件。最后,给出一个数值仿真算例,验证所得结论的合理性。
关键词
网络化多智能体系统,事件驱动控制,时间延迟,领导跟随一致性

Event-Triggered Control-Based Consensus for Multi-Agent
Yangyang Tong, Feng Zhou*
School of Science, Shenyang University of Technology, Shenyang Liaoning
Received: Mar. 16th, 2022; accepted: Apr. 18th, 2022; published: Apr. 25th, 2022

ABSTRACT
In this paper, the problem of event-triggered control for a class of nonlinear networked multi-agent systems is studied. In order to utilize network resources rationally and reduce redundant data transmission between agents, a new event-triggered control scheme is designed. In this scheme, the data transmission interval is determined by the sampled data, which can avoid Zeno phenomenon and improve system control performance. The influence of time delay in data transmission is also considered. Combined with Lyapunov stability theory and other related definitions and lemma, a sufficient condition for achieving consensus of multi-agent system is obtained. Finally, a numerical simulation example is given to verify the rationality of the conclusion.
Keywords:Networked Multi-Agent Systems, Event-Triggered Control, Time Delay, Leader-Following Consensus

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
多智能体指的是在复杂的动态环境中,可以自治地通过传感器来感知外界环境,自主通过控制器来处理信息,再由执行器产生行为,以此来完成预定目标任务的计算系统 [1]。而多个具有简单功能的多智能体组成的系统就是多智能体系统。多智能体系统相比单个多智能体可以处理更复杂的任务,具有鲁棒性强、容错性能好、运营成本低等优点,所以在卫星控制 [2]、无人机编队控制 [3]、交通控制 [4] 等领域应用广泛。
多智能体系统为达到预计控制性能,各个多智能体之间需要进行信息交互。而网络带宽资源是有限的,多智能体在信息传输时,不可避免地会产生时间延迟、网络丢包、网络攻击等网络诱导限制问题 [5] [6] [7] [8]。本文主要考虑了一类系统模型中存在网络诱导时延限制的一致性问题。另一方面,为节约网络资源,提出了事件驱动机制,与传统的时间驱动机制相比,事件驱动机制的设计原理是预先设定触发条件进而决定当前采样数据是否被传输,这样可以避免无用的数据传输。文献 [9] 为了减少数据传输,保证系统的稳定性,提出了一种将动态事件驱动和欺骗攻击相结合的控制器,但阈值参数较保守。文献 [10] 提出了非单调的、可随系统状态变化而变化的动态驱动机制。
在实际情况下,多智能体一般具有非线性特质,非线性多智能体系统更能精确描述实际系统模型。相比线性多智能体系统,非线性系统控制更为复杂,不存在某种通用方法适用任意非线性系统,即任意一种方法只适用于某种特定结构。因此研究非线性多智能体系统更具有现实意义。基于上述分析,本文将针对一类有领导者的非线性多智能体,利用多智能体一致性理论研究事件驱动机制下多智能体一致性问题。
本文共分为四部分:第一部分主要介绍预备知识,对所要研究的多智能体系统进行描述并给出了事件触发控制器设计方案;第二部分进行了稳定性分析,得到一个使多智能体系统趋于一致的充分条件;第三部分给出一个数值算例,验证结论的合理性;第四部分对文章做了简单总结。
2. 准备工作和问题制定
2.1. 预备知识
首先给出文中符号说明,符号具体含义如表1所示:

Table 1. Symbolic representation
表1. 符号表示
2.2. 系统模型描述
考虑一类多智能体系统的动态方程为:
(1)
其中, 表示跟随智能体数量, 为智能体状态变量, 表示系统控制协议, 是非线性动态函数, 是具有适当维数的系数矩阵。
假设1 [11] 假设非线性函数 满足Lipschitz条件,则对于任意 ,存在一个Lipschitz常量 ,满足 。
定义1 [12] 对于智能体的初始状态 ,若系统中各智能体状态满足 ,则称领导跟随智能体系统渐近趋于一致。
基于事件驱动方法,提出如下控制器协议:
(2)
其中,h为采样周期, 表示第k次数据传输时刻, , 分别为智能体i及其邻居智能体j的最新传输采样数据,K为待定的控制增益。
为简化研究,相邻触发间隔 可化分为 。
定义测量误差如下:
(3)
令 ,根据(1)、(2)、(3)得到误差系统:
(4)
其中,
,
,
,。
由于网络资源有限,数据传输会产生时间延迟,考虑实际情况引入时间延迟 ,, 是分段线性的且满足 。
因此多智能体系统可表示为:
(5)
令,
(6)
2.3. 事件驱动机制
定义第i个智能体的事件触发条件为:
(7)
其中,
,
, 为固定适值。
注1 事件触发条件阈值参数 只与智能体i及其邻居智能体的离散数据 和 有关,采用这类周期事件驱动方法有效避免了智能体间的连续通信,相比时间驱动机制,可以有效节约网络资源。
另外当测量误差 远大于 时,即系统状态波动较大,根据所提出的驱动机制,可知阈值参数可能会减小为负数,此时可以视为时间驱动机制,使得数据包传输增加来优化系统性能。反之,系统波动相对较小时,数据包传输将会减少,以此来节约网络资源。
注2 本文中事件驱动时间序列为 ,因此两个事件触发间隔 ,
严格大于采样周期h,有效避免了Zeno现象。
3. 稳定性分析
引理1 [13] 对于任意正定矩阵 ,时间延迟函数 满足 ,矢量函数 使得 ,,,对于任意矩阵 ,有 。
其中, ,。
引理2 [14] (Schur补引理)假设有分块矩阵 ,其中, 则下列三个条件是等价的:
1)
2)
3)
引理3 [15] 假设 , 是具有适当维数的常量矩阵
等价于 ,。
定理1 对于给定采样间隔 ,若存在实矩阵 ,, 和适当维数矩阵S,满足
,则多智能体系统(5)在事件驱动条件(7)下是渐近一致的。
其中,
。
证明:选择Lyapunov函数为:
(8)
其中,
定义,
对Lyapunov函数求导有:
由引理1有
又因引理2可得事件驱动条件
(9)
综上,有
,
只要
就有
。
由引理2和引理3可得,当 时, ,多智能体系统是渐近一致的。
4. 数值例子
考虑由一个领导多智能体和四个跟随多智能体组成的多智能体系统,其中给定参数如下:
,,
智能体的非线性动态为: ,满足假设1且Lipschitz常量 ,邻接矩阵 ,,时延上界 ,采样周期 ,事件触发参数 。
求解定理1中不等式,可得控制器参数 。
采用上述给定参数,利用MATLAB仿真工具可以得到曲线图1~3,其中图1给出了多智能体系统的

Figure 1. System result of state trajectory diagram
图1. 多智能体系统的状态轨迹图
状态轨迹图,图2给出了多智能体系统状态误差响应曲线,图3给出了多智能体系统的事件触发时刻图,在图1可以看出多智能体状态最终趋于一致,从图2中可以看出多智能体之间状态误差最终趋于稳定,图3可以看出在采用了事件驱动机制后,智能体的触发时刻相比周期驱动机制明显减少,意味着数据传输相应减少,相比周期驱动可以有效节约网络资源。综上表明本文的推理证明是合理的。

Figure 2. System result of state error
图2. 多智能体系统的状态误差
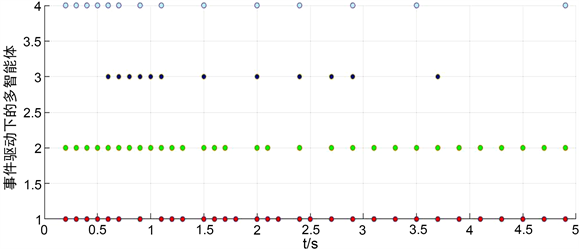
Figure 3. System result of event triggered interval diagram
图3. 多智能体系统的事件触发时刻图
5. 结论
本文采用事件驱动机制,对于满足Lipschitz条件的非线性网络化多智能体,研究了在传输时延的影响下多智能体系统渐近稳定问题。利用MATLAB仿真工具验证了理论的合理性。今后,将在此基础上考虑丢包、网络攻击以及执行器饱和等对多智能体一致性问题的研究。
文章引用
佟洋洋,周 峰. 基于事件驱动多智能体一致性控制
Event-Triggered Control-Based Consensus for Multi-Agent[J]. 理论数学, 2022, 12(04): 645-652. https://doi.org/10.12677/PM.2022.124074
参考文献
- 1. 卫佳. 网络化多智能体系统的一致性研究[D]: [博士学位论文]. 武汉: 华中科技大学, 2013.
- 2. 张卓. 多智能体系统协同控制方法及在分布式卫星应用研究[D]: [博士学位论文]. 哈尔滨: 哈尔滨工业大学, 2017.
- 3. 李少斌, 陈炎财, 杨忠, 黄宵宁, 杨成顺. 具有通信延迟的多无人机编队飞行控制[J]. 信息与控制, 2012, 41(2): 142-146.
- 4. 王力, 李岱, 何忠贺, 马旭辉. 基于多智能体分群同步的城市路网交通控制[J]. 控制理论与应用, 2014, 31(11): 1448-1456.
- 5. 罗俊芝, 张雪飞, 詹环. 随机时延下非线性多智能体系统的一致性控制研究[J]. 电子设计工程, 2021, 29(15): 128-132.
- 6. Jiang, X.L., Xia, G.H., Feng, Z.G. and Jiang, Z. (2021) Consensus Tracking of Data-Sampled Nonlinear Multi-Agent Systems With Packet Loss and Communication Delay. IEEE Transactions on Network Science and Engineering, 8, 126-137. https://doi.org/10.1109/TNSE.2020.3029972
- 7. Syed Ali, M., Agalya, R., Saroha, S. and Saeed, T. (2020) Leaderless Consensus of Non-Linear Mixed Delay Multi-Agent Systems with Random Packet Losses via Sampled-Data Control. International Journal of Control, Automation, and Systems, 18, 1885-1893. https://doi.org/10.1007/s12555-019-0446-1
- 8. Zhang, D., Liu, L. and Feng. G. (2019) Consensus of Hetero-geneous Linear Multiagent Systems Subject to Aperiodic Sampled-Data and DoS Attack. IEEE Transactions on Cy-bernetics, 49, 1501-1511. https://doi.org/10.1109/TCYB.2018.2806387
- 9. Wang, H.T. and Wang, Y.Q. (2020) Dynamic Event-Triggered and Guaranteed Cost Asynchronous Control for Singular Markov Jump Systems against Deception Attacks. 2020 39th Chinese Control Conference (CCC), Shenyang, 27-29 July 2020, 4430-4436. https://doi.org/10.23919/CCC50068.2020.9189191
- 10. Chen, M.S., Yan, H.C., Zhang, H., Chi, M. and Li, Z. (2021) Dynamic Event-Triggered Asynchronous Control for Nonlinear Multiagent Systems Based on T-S Fuzzy Models. IEEE Transactions on Fuzzy Systems, 29, 2580-2592. https://doi.org/10.1109/TFUZZ.2020.3004009
- 11. Thau, F.E. (1973) Observing the State of Non-Linear Dy-namic Systems. International Journal of Control, 17, 471-479. https://doi.org/10.1080/00207177308932395
- 12. Zhu, W. and Jiang, Z.P. (2015) Event-Based Lead-er-Following Consensus of Multi-Agent Systems with Input Time Delay. IEEE Transactions on Automatic Control, 60, 1362-1367. https://doi.org/10.1109/TAC.2014.2357131
- 13. Guo, G., Ding, L. and Han, Q.L. (2014) A Dis-tributed Event-Triggered Transmission Strategy for Sampled-Data Consensus of Multi-Agent Systems. Automatica, 50, 1489-1496. https://doi.org/10.1016/j.automatica.2014.03.017
- 14. Su, H.S., Wang, Z.J., Song, Z.Y., Chen, X. and Chen, X. (2017) Event-Triggered consensus of Non-Linear Multi-Agent Systems with Sampling Data and Time Delay. IET Control Theory& Applications, 11, 1715-1725. https://doi.org/10.1049/iet-cta.2016.0865
- 15. Ding, Y.C., Liu, H. and Cheng, J. (2014) Filtering for a Class of Discrete Time Singular Markovian Jump Systems with Time-Varying Delays. ISA Transactions, 53, 1054-1060. https://doi.org/10.1016/j.isatra.2014.05.005
NOTES
*通讯作者。