Journal of Oil and Gas Technology
Vol.40 No.05(2018), Article ID:27425,9
pages
10.12677/JOGT.2018.405105
Design and Calculation of Load Adaptive Five Link-rod Pumping Units
Dengming Guo1, Jinbo Chen1*, Zhenhua Xia1, Xinsheng Xiang2, Junmin Gong2, Shuhang Wang2, Muzhou Liu2
1School of Mechanical Engineering, Yangtze University, Jingzhou Hubei
2Engineering Technology Company, Xinjiang Petroleum Administration, Karamay Xinjiang

Received: Mar. 30th, 2018; accepted: May 28th, 2018; published: Oct. 15th, 2018



ABSTRACT
The structure of the new load adaptive five-link-rod pumping units was introduced, and the theoretical formulae for the motion calculation and dynamic calculation of the adaptive five-link-rod pumping units were deduced. By taking the CYJZ10-4.2-53HB adaptive pumping units as an example, the performance characteristics of the five-link-rod pumping units were discussed and compared with the offset pumping units. The results show that under the same conditions, the adaptive five-link-rod pumping units can save energy more than 8.65%, decrease 44.94% of connecting rod tension with 16.83% decrease in the peak torque of the gear reducer, and it is a promising energy-saving pumping unit.
Keywords:Beam Pumping Units, Five-link-rod Pumping Unit, Energy-saving Pumping Unit, Design Calculation, Load Adaptive
载荷自适应五连杆抽油机的设计计算
郭登明1,陈进博1*,夏振华1,向新胜2,贡军民2,王树行2,刘牧洲2
1长江大学机械工程学院,湖北 荆州
2新疆石油管理局工程技术公司,新疆 克拉玛依
作者简介:郭登明(1963-),男,教授,主要从事石油机械的教学、科研与设计工作。

收稿日期:2018年3月30日;录用日期:2018年5月28日;发布日期:2018年10月15日

摘 要
介绍了新型载荷自适应五连杆抽油机的结构组成,推导出了载荷自适应五连杆抽油机的运动计算和动力计算的理论公式。以CYJZ10-4.2-53HB型载荷自适应抽油机为计算实例,论述了该五连杆抽油机的性能特点,并与偏置抽油机进行了对比。计算结果表明,在相同的条件下,载荷自适应五连杆抽油机可节电8.65%以上,连杆拉力减少44.94%,减速器峰值扭矩减少16.83%,是一种比较有发展前途的节能抽油机。
关键词 :游梁式抽油机,五连杆抽油机,节能抽油机,设计计算,载荷自适应

Copyright © 2018 by authors, Yangtze University and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/
1. 概述
随着油田进入中后期开发阶段,原油含水率不断上升,油层压力降低,油井动液面逐渐下降,为了保持原油稳产,降低采油成本,要求采油设备不仅能满足“深抽、大排量”提液的工艺要求,而且要具有能耗低、可靠性高等特点,为此,选用高效五连杆的抽油机变得特别重要。近几年,出现了大量新设计的五连杆抽油机。笔者介绍一种新型载荷自适应五连杆抽油机的设计方法,供有关设计者和使用者参考。
载荷自适应五连杆抽油机的受力简图如图1所示,可以看出游梁平衡重W1与副连杆BC连成一体,分别与游梁、主连杆(BA)铰接。即该抽油机由曲柄、连杆、副连杆、游梁及机架组成。按照平面机构理论,该抽油机由2个自由度构成,必须有2个驱动件才能使机构有确定的运动,实际计算过程中一般以曲柄转角θ和游梁摆角δ为自由度进行几何参数、运动参数和动力参数的求解。文献 [1] - [6] 分别介绍了二自由度五杆机构的分析计算方法。由于游梁平衡重W1与悬点载荷W2的相互作用、相互适应,其结果是当曲柄在任何位置时,使得游梁具有确定的位置。即当游梁平衡重W1和悬点载荷W2一定时,游梁摆角δ随曲柄转角θ而定,可归属于单自由度问题,因此该抽油机实际上是一种载荷自适应型单自由度抽油机。
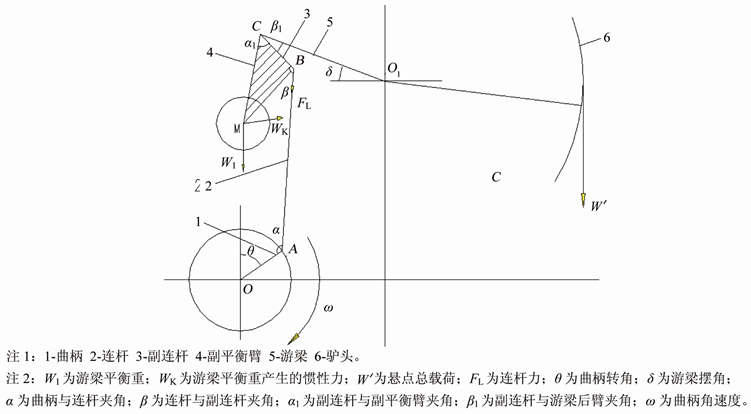
Figure 1. The simplified diagram of stress of the load adaptive five link-rod pumping unit
图1. 载荷自适应五连杆抽油机受力简图
2. 理论计算
假定曲柄匀速转动,已知该抽油机各个运动构件的长度,以曲柄转角θ和游梁摆角δ为驱动变量(二自由度),按照五连杆机构的计算方法进行如下计算及分析。
2.1. 运动计算
2.1.1. 速度计算
图2为该抽油机的速度矢量简图,利用作图分析法,先计算B点(在速度矢量图中用B’表示,其他点依次类推)的速度,再根据相似原理,求出M点的速度。
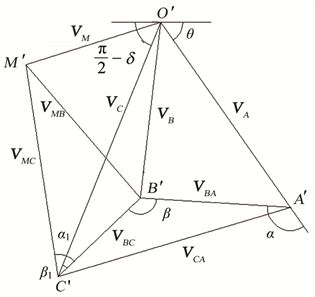
Figure 2. The simplified diagram of the velocity vector of the pumping unit
图2. 抽油机速度矢量简图
在速度三角形 中,由余弦定理:
(1)
其中 , 。
在速度三角形 中,由正弦定理:
; (2)
故:
(3)
式中:VCA、VBA、VBC分别为相对速度,m/s;VA为A点速度,m/s;VB为B点速度,m/s,VC为C点速度,m/s;
为OA与CO1夹角,(˚);n为曲柄转速,s−1; 为游梁角速度,s−1;Lc为游梁后臂长度,m。
为游梁角速度,s−1;Lc为游梁后臂长度,m。
在速度三角形 中,由正弦定理可知:
; (4)
故:
(5)
式中:VMB、VMC分别为相对速度,m/s;VM为M点速度,m/s。
2.1.2. 加速度计算
图3为该抽油机的加速度矢量简图,按照求解速度的方法,同样利用作图分析法,先计算B点的加速度,再根据相似原理,求出M点的加速度,具体方法如下:
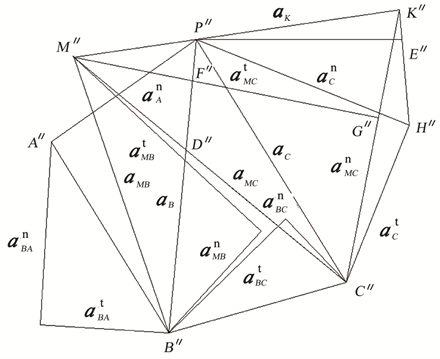
Figure 3. The simplified diagram of the acceleration vector
图3. 抽油机加速度矢量简图
A点的法向加速度:
(6)
C点的加速度:
(7)
其中:
,
式中:R为曲柄半径,m; 为C点法向加速度,m/s2, 为C点切向加速度,m/s2; 为游梁角加速度,s−2; 为C点加速度,m/s2;LC为游梁后臂长度,m。
对于B点而言:
; (8)
将加速度向 方向投影,则有:
(9)
将加速度向 方向投影,则有:
(10)
故:
; (11)
式中: 为以点A为基点,点B绕点A转动的法向加速度,m/s2; 为以点C为基点,点B绕点C转动的法向加速度m/s2;LP为连杆长度,m;LB为副连杆长度,m; 为以点C为基点,点B绕点C转动的切向加速度,m/s2; 为以点A为基点,点B绕点A转动的切向加速度,m/s2; 为以点A为基点,点B绕点A转动的加速度,m/s2 ; 为以点C为基点,点B绕点C转动的加速度,m/s2。
在加速度三角形 中,由余弦定理:
(12)
在加速度三角形 中,由正弦定理:
; (13)
在加速度三角形 中,由余弦定理:
(14)
式中: 为B点的加速度,m/s2, 为以点B为基点,点M绕点B转动的加速度,m/s2; 为以点C为基点,点M绕点C转动的加速度,m/s2, 为点M的加速度,m/s2。
在加速度三角形 中,根据余弦定理,有:
(15)
在加速度三角形 中,根据余弦定理,有:
(16)
(17)
(18)
在加速度三角形 中,根据余弦定理,有:
(19)
(20)
(21)
在加速度三角形 中,根据余弦定理,有:
(22)
(23)
在加速度三角形 中,根据正弦定理,有:
(24)
(25)
(26)
在加速度三角形 中,根据余弦定理,有:
(27)
式中: 为以点D为基点,点M绕点D转动的加速度,m/s2;
为D点的加速度,m/s2;
为F点的加速度,m/s2;
为以点F为基点,点M绕点F转动的加速度,m/s2。
为以点D为基点,点M绕点D转动的加速度,m/s2;
为D点的加速度,m/s2;
为F点的加速度,m/s2;
为以点F为基点,点M绕点F转动的加速度,m/s2。
在加速度三角形 中,根据余弦定理,有:
(28)
(29)
(30)
在加速度三角形 中,根据正弦定理,有:
(31)
在加速度三角形 中,根据余弦定理,有:
(32)
式中: 为K点的加速度,m/s2; 为以点H为基点,点K绕点H转动的加速度,m/s2。
(33)
(34)
故:
(35)
在加速度三角形 中,根据余弦定理及正弦,有:
(36)
式中: 以点E为基点,点K绕点E转动的加速度,m/s2; 为点E的加速度,m/s2。
(37)
2.2. 受力分析
游梁平衡重的惯性载荷:
(38)
悬点总载荷:
(39)
取游梁支座为研究对象,列力平衡方程解得:
(40)
式中:g为重力加速度,m/s2;W2为悬点静载荷,N;LA为游梁前臂长度,m。
在整个抽油机受力分析过程中,必须满足如下条件:
 (41)
(41)
式中:LD为副平衡臂长度,m;LB为副连杆长度,m。
(42)
; (43)
式中:TW为工作扭矩,N∙m;TB为平衡扭矩,N∙m;TN为净扭矩,N∙m;τ为偏置角,˚;MB为最大平衡扭矩,N∙m。
3. 计算实例及分析
以CYJZ10-4.2-53HF型抽油机为例,研究自适应抽油机的性能特点。抽油机机构尺寸如下:曲柄半径为1120 mm,连杆长度为3800 mm,游梁后臂长度为2550 mm,游梁前臂长度为4365 mm,减速器输出轴中心到支架轴承中心的水平距离为3400 mm,减速器输出轴中心到支架轴承中心的垂直距离为3615 mm,副连杆长度为855 mm。计算工况冲次数为6.0 min−1,泵径为44 mm,理论计算冲程为4.20 m。运用抽油机计算软件 [7] 可进行相应的计算,图4为悬点的加速度曲线图,图5为抽油机的工作扭矩、平衡扭矩和减速器输出轴扭矩图。
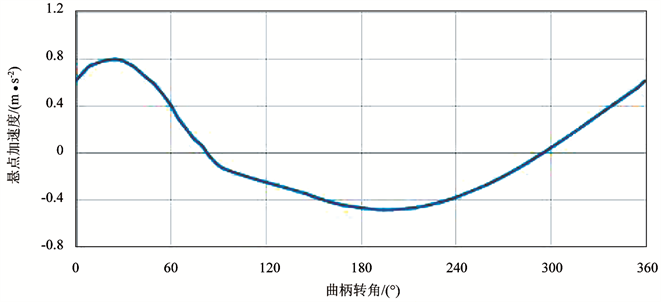
Figure 4. The curve of the acceleration of the suspension point varying with the angle of rotation of the crank
图4. 抽油机悬点加速度随曲柄转角变化的曲线
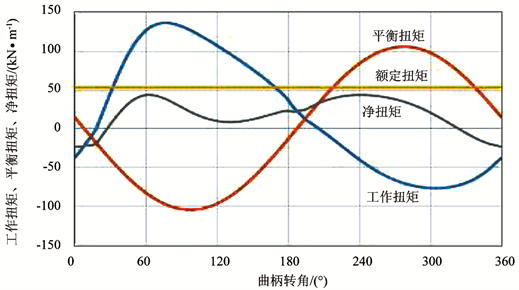
Figure 5. The curve of torque changing with crank angle of pumping unit
图5. 抽油机的扭矩随曲柄转角变化曲线
4. 结论
1) 载荷自适应五连杆抽油机具有运转平稳、能耗低、抗冲击能力强的特点,特别是当光杆失载的情况下具有明显的抗冲击性能。
2) 与相同工况的偏置型抽油机相比,节电8.65%,减速器峰值扭矩降低16.83%,连杆受力降低44.94%。载荷自适应五连杆抽油机是一种比较有发展前途的节能型抽油机。
3) 研究的数值计算方法,对于其他同类型二自由度自适应抽油机的设计计算提供了技术支撑。
在设计过程中,由于该抽油机的冲程长度随着外载荷的变化而变化,在结构设计时应以最大载荷的冲程长度来设计驴头的弧面结构,以防止出现弧面长度不足的情况;另外,在上下冲程换向时,由于载荷的突然变化而造成游梁短时不运动,而副连杆出现“爬行”的现象,对此,应当引起设计者和使用者的高度重视。
基金项目
新疆石油管理局重点攻关项目(YJS2017-C9001)。
参考文献
[1] 周洪, 邹慧君. 混合输入型五杆机构的分析与设计[J]. 上海交通大学学报, 1999, 33(7): 865-869.
[2] 周世才, 杨玉虎, 沈煜, 等. 平面铰链五杆机构的优化综合平衡[J]. 天津大学学报, 2010, 38(4): 303-308.
[3] 方益奇, 孙怀安, 夏爱宏. 平面五杆可控机构运动性能和误差的研究[J]. 机械设计, 2003, 20(10): 48-50.
[4] 李庆扬, 王能超, 易大义. 数值分析[M]. 武汉: 华中科技大学出版社, 2006: 97-102.
[5] 夏爱生, 陈博文, 胡宝安, 等. 二阶三点数值微分公式的外推算法[J]. 天津理工大学学报, 2005, 21(6): 37-39.
[6] 王燕. 二阶导数的五点数值微分公式及外推算法[J]. 天津理工大学学报, 2009, 25(4): 37-39.
[7] 郭登明, 艾薇, 杨菁, 等. 抽油机设计计算软件的开发[J]. 石油机械, 2003, 31(s1): 26-28.
[编辑] 帅群
NOTES
*通信作者。