 Mechanical Engineering and Technology 机械工程与技术, 2012, 1, 30-36 http://dx.doi.org/10.12677/met.2012.13006 Published Online September 2012 (http://www.hanspub.org/journal/met.html) Experimental Study of the Main Characteristics of Stacked Type Piezoelectric Materials* Yuchuan Ma, Ye He, Xiao an Che n The State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing Email: h1166@cqu.edu.cn Received: May 24th, 2012; revised: Jun. 27th, 2012; accepted: Jul. 7th, 2012 Abstract: In this paper, the stacked piezoelectric actuator which is used in the main spindle vibration suspension were tested and analyzed. The static displacement with variety pressure, creep characteristics. Hysteresis characteristics of PZT were tested to provide data for the active vibration contro l system. The results show that this kind of materials will output the largest displacement with a proper force exerted on it. The hysteresis phenomena will be relieved while the force gains. However, its displacement will be reduced at the same time. The linearity of PZT under static pressure is better than it under elastic preload. These outcomes provide a scientific grounding for the follow up study. Keywords: PZT; Actuator; Static Characteristics; Dynamic Characteristics; Hysteresis 叠堆式压电陶瓷基本特性实验研究* 麻玉川,合 烨,陈小安 重庆大学机械传动国家重点实验室,重庆 Email: h1166@cqu.edu.cn 收稿日期:2012 年5月24 日;修回日期:2012 年6月27 日;录用日期:2012 年7月7日 摘 要:本文针对应用于高速电主轴振动主动控制的叠堆式压电陶瓷(PZT)作动器进行实验测试和分析。主要测 试了其基本特性,包括自由状态下的输出位移,不同压力下的输出位移,蠕变特性,PZT 的迟滞特性;为主动 控制系统提供基础数据。实验结果显示输出特性和外加负载的关系:合适压力下叠堆式压电陶瓷作动器输出位 移最大,随着负载压力的增大位移输出迟滞度有一定程度的减小,但是过大的压力会导致输出位移的减小,其 在恒定压力下的线性度优于弹性预压力下的线性度;其动态性能满足控制系统的要求。为后续研究提供了科学 依据。 关键词:叠堆式压电陶瓷(PZT);作动器;静态特性;动态特性;迟滞 1. 引言 压电材料以其体积小、精度高、响应速度快、功 耗低等特点,近来已被广泛应用,作为执行元件应用 到精密结构控制、振动主动控制、噪声控制等方面[1-3]。 叠堆式压电作动器通常具有较高的输出力和较大的 带宽,其体积和输出位移相对较小,这一特性符合高 速电主轴振动主动控制对于作动器的基本要求。叠堆 式压电陶瓷作动器作为主动控制的执行部件,产生控 制力和输出位移,其性能的好坏直接影响到振动主动 控制的性能。陈大任[4]等针对采用陶瓷坯膜流延成型 和陶瓷坯膜/金属内电极共烧技术,制作成的长方形多 层片式高含铅 PZT 软性压电陶瓷微驱动器作了动态 和静态分析并从压电陶瓷材料内部机理对其特性进 行了分析;阎绍泽[5]等对圆形叠堆式压电陶瓷作动器 *资助信息:基金项目:国家自然科学基金(51005259)。 Copyright © 2012 Hanspub 30 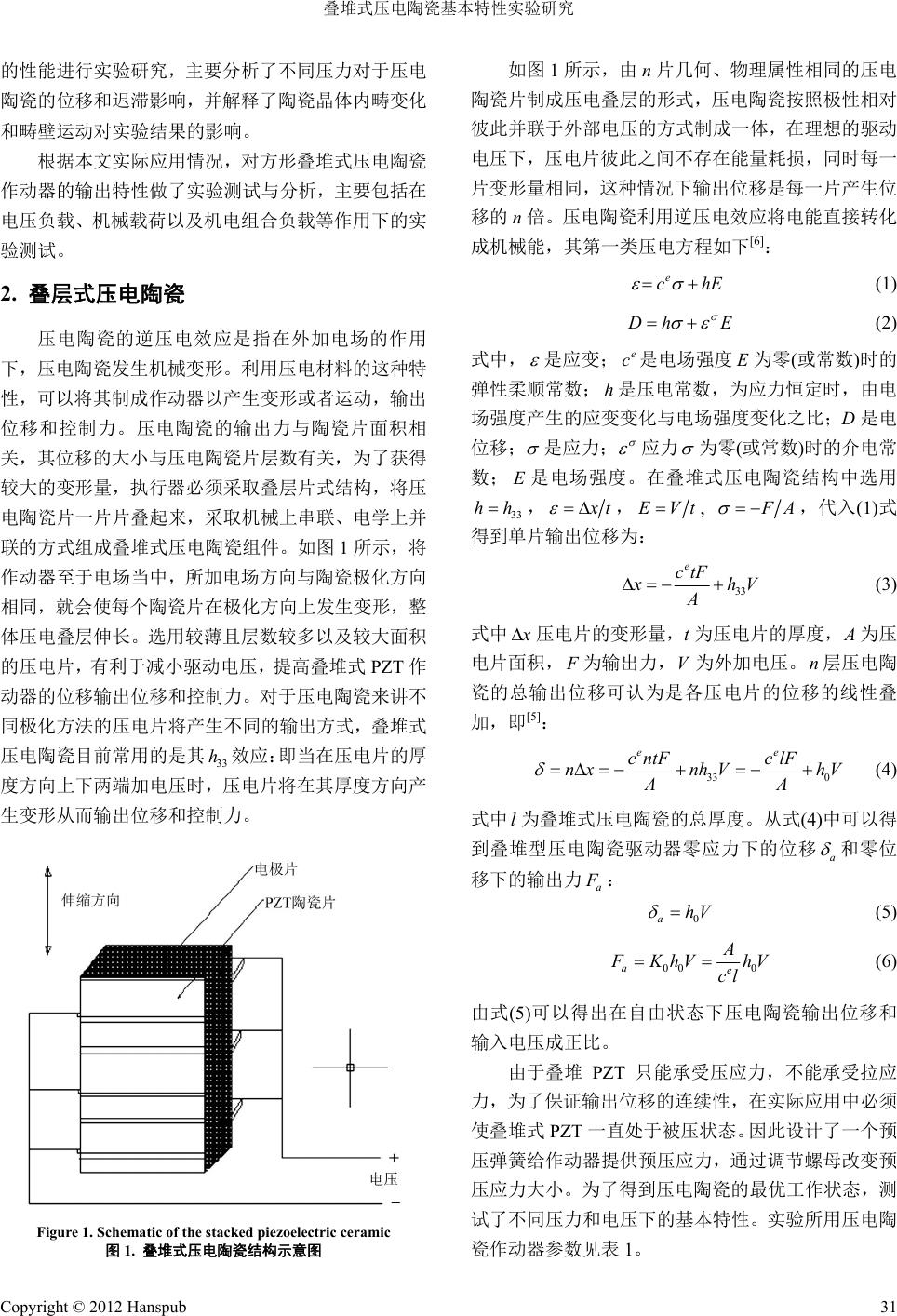 叠堆式压电陶瓷基本特性实验研究 的性能进行实验研究,主要分析了不同压力对于压电 陶瓷的位移和迟滞影响,并解释了陶瓷晶体内畴变化 和畴壁运动对实验结果的影响。 根据本文实际应用情况,对方形叠堆式压电陶瓷 作动器的输出特性做了实验测试与分析,主要包括在 电压负载、机械载荷以及机电组合负载等作用下的实 验测试。 2. 叠层式压电陶瓷 压电陶瓷的逆压电效应是指在外加电场的作用 下,压电陶瓷发生机械变形。利用压电材料的这种特 性,可以将其制成作动器以产生变形或者运动,输出 位移和控制力。压电陶瓷的输出力与陶瓷片面积相 关,其位移的大小与压电陶瓷片层数有关,为了获得 较大的变形量,执行器必须采取叠层片式结构,将压 电陶瓷片一片片叠起来,采取机械上串联、电学上并 联的方式组成叠堆式压电陶瓷组件。如图 1所示,将 作动器至于电场当中,所加电场方向与陶瓷极化方向 相同,就会使每个陶瓷片在极化方向上发生变形,整 体压电叠层伸长。选用较薄且层数较多以及较大面积 的压电片,有利于减小驱动电压,提高叠堆式PZT 作 动器的位移输出位移和控制力。对于压电陶瓷来讲不 同极化方法的压电片将产生不同的输出方式,叠堆式 压电陶瓷目前常用的是其 效应:即当在压电片的厚 度方向上下两端加电压时,压电片将在其厚度方向产 生变形从而输出位移和控制力。 33 h Figure 1. Schematic of the stacked piezoelectric ceramic 图1. 叠堆式压电陶瓷结构示意图 如图 1所示,由 n片几何、物理属性相同的压电 陶瓷片制成压电叠层的形式,压电陶瓷按照极性相对 彼此并联于外部电压的方式制成一体,在理想的驱动 电压下,压电片彼此之间不存在能量耗损,同时每一 片变形量相同,这种情况下输出位移是每一片产生位 移的 n倍。压电陶瓷利用逆压电效应将电能直接转化 成机械能,其第一类压电方程如下[6]: e ch E (1) Dh E (2) 式中, 是应变; 是电场强度 为零(或常数)时的 弹性柔顺常数;是压电常数,为应力恒定时,由电 场强度产生的应变变化与电场强度变化之比;D是电 位移; e cE h 是应力; 应力 为零(或常数)时的介电常 数; 是电场强度。在叠堆式压电陶瓷结构中选用 E h 33 h , x t ,EVt , F A ,代入(1)式 得到单片输出位移为: 33 e ctF x hV A (3) 式中 x 压电片的变形量,t为压电片的厚度, A 为压 电片面积, F 为输出力,V为外加电压。 层压电陶 瓷的总输出位移可认为是各压电片的位移的线性叠 加,即[5]: n 33 0 ee cntF clF nxnhVhV A A (4) 式中 l为叠堆式压电陶瓷的总厚度。从式(4)中可以得 到叠堆型压电陶瓷驱动器零应力下的位移 a 和零位 移下的输出力 a F : 0ahV (5) 00 0ae A F KhV hV cl (6) 由式(5)可以得出在自由状态下压电陶瓷输出位移和 输入电压成正比。 由于叠堆 PZT 只能承受压应力,不能承受拉应 力,为了保证输出位移的连续性,在实际应用中必须 使叠堆式PZT 一直处于被压状态。因此设计了一个预 压弹簧给作动器提供预压应力,通过调节螺母改变预 压应力大小。为了得到压电陶瓷的最优工作状态,测 试了不同压力和电压下的基本特性。实验所用压电陶 瓷作动器参数见表 1。 Copyright © 2012 Hanspub 31 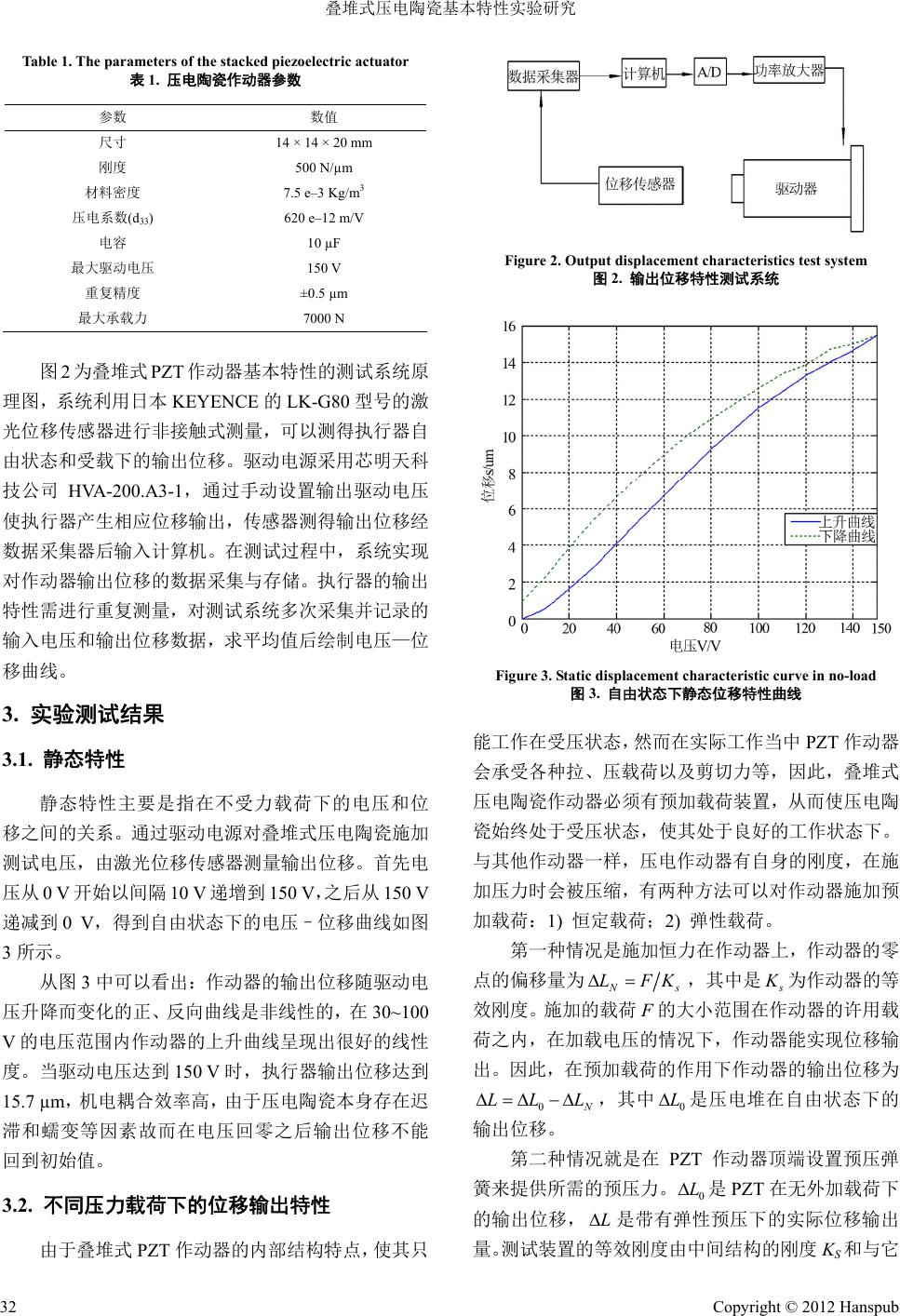 叠堆式压电陶瓷基本特性实验研究 Table 1. The parameters of the stacked piezoelectric actuator 表1. 压电陶瓷作动器参数 参数 数值 尺寸 14 × 14 × 20 mm 刚度 500 N/µm 材料密度 7.5 e–3 Kg/m3 压电系数(d33) 620 e–12 m/V 电容 10 µF 最大驱动电压 150 V 重复精度 ±0.5 µm 最大承载力 7000 N 图2为叠堆式 PZT作动器基本特性的测试系统原 理图,系统利用日本 KEYENCE 的LK-G80 型号的激 光位移传感器进行非接触式测量,可以测得执行器自 由状态和受载下的输出位移。驱动电源采用芯明天科 技公司 HVA-200.A3-1,通过手动设置输出 驱动电压 使执行器产生相应位移输出,传感器测得输出位移经 数据采集器后输入计算机。在测试过程中,系统实现 对作动器输出位移的数据采集与存储。执行器的输出 特性需进行重复测量,对测试系统多次采集并记录的 输入电压和输出位移数据,求平均值后绘制电压—位 移曲线。 3. 实验测试结果 3.1. 静态特性 静态特性主要是指在不受力载荷下的电压和位 移之间的关系。通过驱动电源对叠堆式压电陶瓷施加 测试电压,由激光位移传感器测量输出位移。首先电 压从 0 V开始以间隔 10 V递增到 150 V,之后从 150 V 递减到 0 V,得到自由状态下的电压–位移曲线如图 3所示。 从图 3中可以看出:作动器的输出位移随驱动电 压升降而变化的正、反向曲线是非线性的,在30~100 V的电压范围内作动器的上升曲线呈现出很好的线性 度。当驱动电压达到 150 V时,执行器输出位移达到 15.7 µm,机电耦合效率高,由于压电陶瓷本身存在迟 滞和蠕变等因素故而在电压回零之后输出位移不能 回到初始值。 3.2. 不同压力载荷下的位移输出特性 由于叠堆式PZT 作动器的内部结构特点,使其只 Figure 2. Output displacement characteristics test system 图2. 输出位移特性测试系统 Figure 3. Static displacement characteristic curve in no-load 图3. 自由状态下静态位移特性曲线 能工作在受压状态,然而在实际工作当中 PZT作动器 会承受各种拉、压载荷以及剪切力等,因此,叠堆式 压电陶瓷作动器必须有预加载荷装置,从而使压电陶 瓷始终处于受压状态,使其处于良好的工作状态下。 与其他作动器一样,压电作动器有自身的刚度,在施 加压力时会被压缩,有两种方法可以对作动器施加预 加载荷:1) 恒定载荷;2) 弹性载荷。 第一种情况是施加恒力在作动器上,作动器的零 点的偏移量为 N s LFK ,其中是 s K 为作动器的等 效刚度。施加的载荷 F的大小范围在作动器的许用载 荷之内,在加载电压的情况下,作动器能实现位移输 出。因此,在预加载荷的作用下作动器的输出位移为 0 N LL L ,其中 0 L 是压电堆在自由状态下的 输出位移。 第二种情况就是在 PZT 作动器顶端设置预压弹 簧来提供所需的预压力。 0 L 是PZT 在无外加载荷下 的输出位移, L 是带有弹性预压下的实际位移输出 量。测试装置的等效刚度由中间结构的刚度 KS和与它 Copyright © 2012 Hanspub 32  叠堆式压电陶瓷基本特性实验研究 并联的弹簧刚度 p K 组成。容易得到测试装置顶杆的 自由输出位移量 0 s sp LLKKK ;由于预压力 而损失的位移为 1 Rss LKKK p 。 显然,弹簧的刚度 p K 直接影响 PZT作动器的等 效刚度和实际输出位移,同时也影响到PZT 作动器的 预压力,因此对于预压弹簧刚度的选取必须同时考虑 PZT 作动器本身刚度、需要的输出位移和选择的预压 力大小等几个方面的因素。 不同压力负载下的位移输出是采用叠层式PZT 作动器时必须考虑的重要参数之一。受载实验是在室 温条件下进行的,同时考虑具体工况下叠层式PZT 作 动器所受压力,选择的压力载荷范围在 0~150 N,采 用缓慢加载方式,测量不同载荷下的位移输出曲线, 以确定在实际应工作当中的合适预紧力以及在此与 压力下的位移电压特性。 图4所示为作动器在不同恒定载荷下的电压–位 移曲线图。从图中可以看出不同载荷下的电压–位移 曲线趋势基本一致,但是不同载荷下的最大输出位移 不同,与文献[5]中的实验结果趋势一致。可以看出压 电陶瓷在有外加载荷下的输出位移比不加载的情况 下输出位移大。在压力为 50 N下输出位移达到 17 µm,同时施加过大的压力会导致最大输出位移量的减 小,随着压力的增大迟滞非线性有一定程度的减小。 叠堆式 PZT 作动器在弹性预紧力下的输出位移 测试,通过调节螺母来改变弹簧的压缩量,经过准确 的计算和操作,调节螺母到相应输出力的位置,施加 相应的弹性预紧力。实验测试了在预压力为 50 N和 70 N下的电压位移输出特性,绘制的曲线如图 5和6。 实验测试结果显示:随着压力的增大,输出位移 在增大,压电陶瓷的迟滞度在减小,有利于压电陶瓷 的控制,同时在弹性压力下输出位移的非线性严重, 对于压电陶瓷的迟滞建模精度影响较大。 3.3. 迟滞特性 在理想状态下,根据压电陶瓷的逆压电效应理 论,压电陶瓷的输出位移量与输入电压成线性关系, 但在实际获得的曲线图中,位移的上升曲线和下降曲 线不重合,呈现出滞回环形式,这种输入电压和输出 位移之间的非线性对应关系称为迟滞特性。从宏观上 讲,迟滞由电致伸缩效应和铁电效应共同产生的;从 Figure 4. Curves of voltage and dis pl ac ement under different load 图4. 不同载荷下的电压–位移曲线图 Figure 5. Curves of voltage and displacement under preloading 50 N 图5. 预压 50 N弹性力下的电压位移图 Figure 6. Curves of voltage and displacement under preloading 70 N 图6. 预压 70 N弹性力下的电压位移图 Copyright © 2012 Hanspub 33 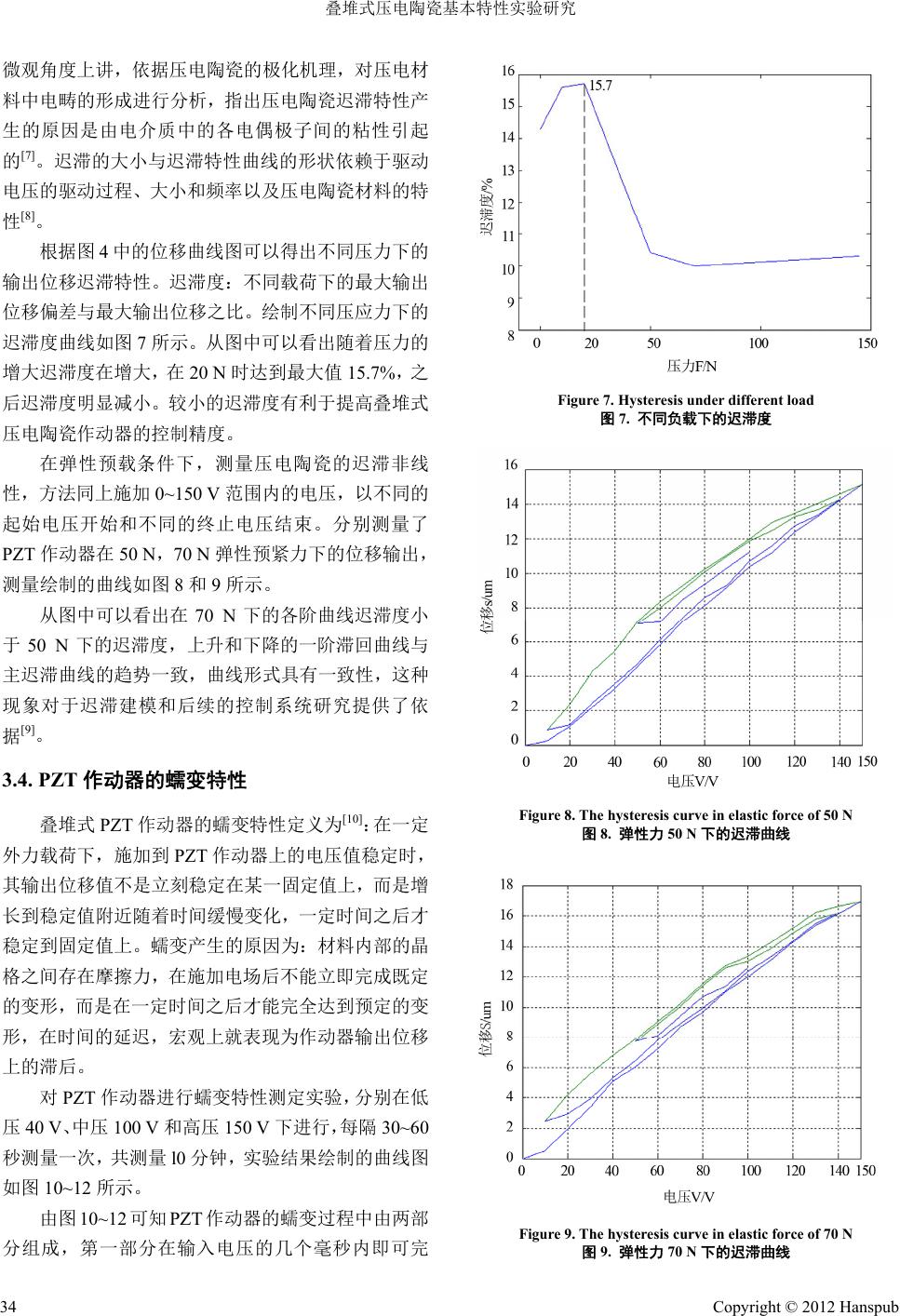 叠堆式压电陶瓷基本特性实验研究 微观角度上讲,依据压电陶瓷的极化机理,对压电材 料中电畴的形成进行分析,指出压电陶瓷迟滞特性产 生的原因是由电介质中的各电偶极子间的粘性引起 的[7]。迟滞的大小与迟滞特性曲线的形状依赖于驱动 电压的驱动过程、大小和频率以及压电陶瓷材料的特 性[8]。 根据图 4中的位移曲线图可以得出不同压力下的 输出位移迟滞特性。迟滞度:不同载荷下的最大输出 位移偏差与最大输出位移之比。绘制不同压应力下的 迟滞度曲线如图 7所示。从图中可以看出随着压力的 增大迟滞度在增大,在 20 N时达到最大值 15.7%,之 后迟滞度明显减小。较小的迟滞度有利于提高叠堆式 压电陶瓷作动器的控制精度。 在弹性预载条件下,测量压电陶瓷的迟滞非线 性,方法同上施加 0~150 V范围内的电压,以不同的 起始电压开始和不同的终止电压结束。分别测量了 PZT 作动器在 50 N,70 N弹性预紧力下的位移输出, 测量绘制的曲线如图 8和9所示。 从图中可以看出在 70 N下的各阶曲线迟滞度小 于50 N下的迟滞度,上升和下降的一阶滞回曲线与 主迟滞曲线的趋势一致,曲线形式具有一致性,这种 现象对于迟滞建模和后续的控制系统研究提供了依 据[9]。 3.4. PZT作动器的蠕变特性 叠堆式 PZT 作动器的蠕变特性定义为[10]:在一定 外力载荷下,施加到 PZT作动器上的电压值稳定时, 其输出位移值不是立刻稳定在某一固定值上,而是增 长到稳定值附近随着时间缓慢变化,一定时间之后才 稳定到固定值上。蠕变产生的原因为:材料内部的晶 格之间存在摩擦力,在施加电场后不能立即完成既定 的变形,而是在一定时间之后才能完全达到预定的变 形,在时间的延迟,宏观上就表现为作动器输出位移 上的滞后。 对PZT 作动器进行蠕变特性测定实验,分别在低 压40 V、中压100 V和高压 150 V下进行,每隔30~60 秒测量一次,共测量l0 分钟,实验结果绘制的曲线图 如图 10~12所示。 由图 10~12可知 PZT作动器的蠕变过程中由两部 分组成,第一部分在输入电压的几个毫秒内即可完 Figure 7. Hysteresis under different load 图7. 不同负载下的迟滞度 Figure 8. The hysteresis curve in elastic force of 50 N 图8. 弹性力 50 N下的迟滞曲线 Figure 9. The hysteresis curve in elastic force of 70 N 图9. 弹性力 70 N下的迟滞曲线 Copyright © 2012 Hanspub 34 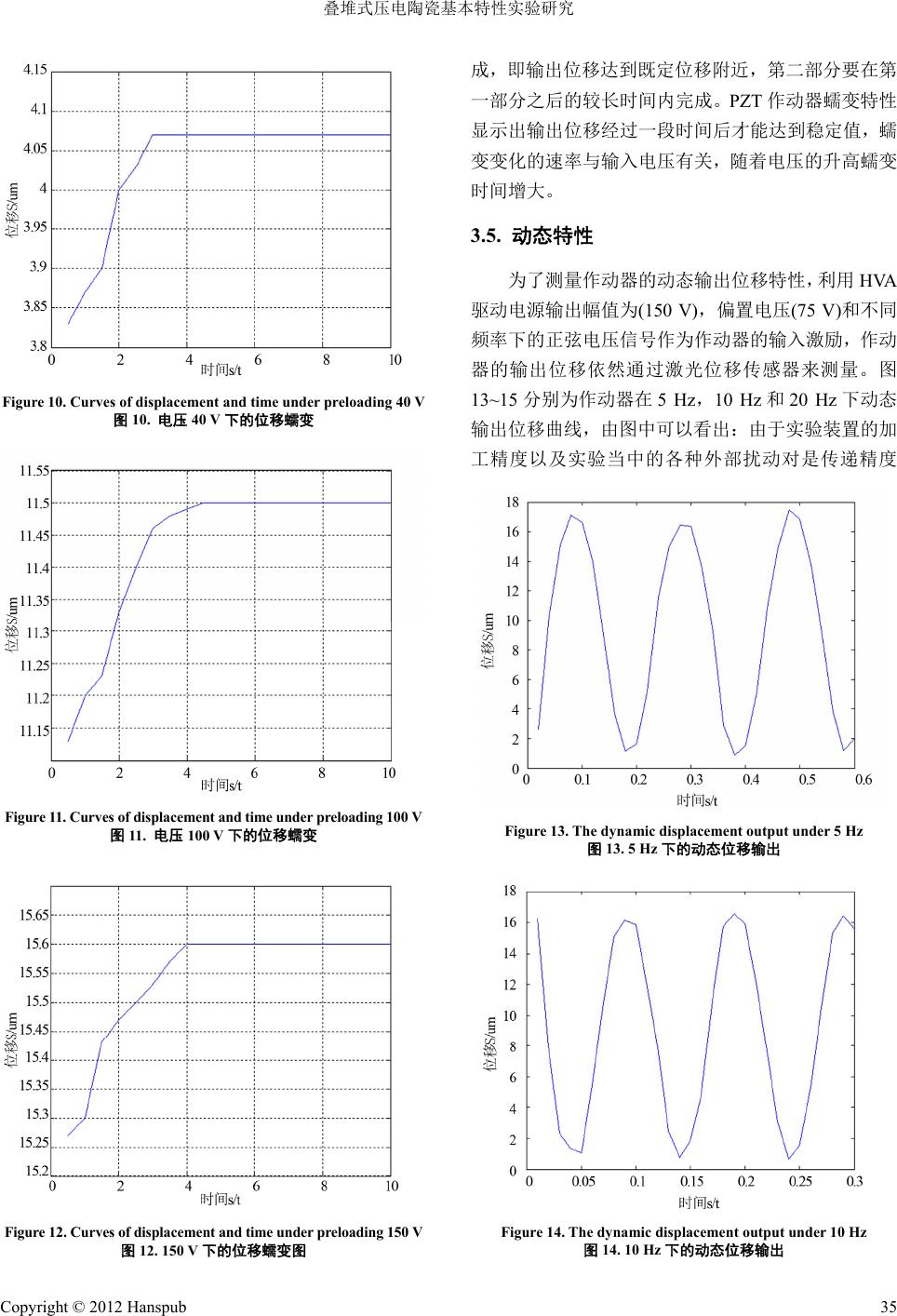 叠堆式压电陶瓷基本特性实验研究 Figure 10. Curves of displacement and time under preloading 40 V 图10. 电压 40 V下的位移蠕变 Figure 11. Curves of displacement and time under preloading 100 V 图11. 电压 100 V下的位移蠕变 Figure 12. Curves of displacement and time under preloading 150 V 图12. 150 V下的位移蠕变图 成,即输出位移达到既定位移附近,第二部分要在第 一部分之后的较长时间内完成。PZT 作动器蠕变特性 显示出输出位移经过一段时间后才能达到稳定值,蠕 变变化的速率与输入电压有关,随着电压的升高蠕变 时间增大。 3.5. 动态特性 为了测量作动器的动态输出位移特性,利用 HVA 驱动电源输出幅值为(150 V),偏置电压(75 V)和不同 频率下的正弦电压信号作为作动器的输入激励,作动 器的输出位移依然通过激光位移传感器来测量。图 13~15分别为作动器在 5 Hz,10 Hz和20 Hz下动态 输出位移曲线,由图中可以看出:由于实验装置的加 工精度以及实验当中的各种外部扰动对是传递精度 Figure 13. The dynamic displacement output under 5 Hz 图13. 5 Hz下的动态位移输出 Figure 14. The dynamic displacement output under 10 Hz 图14. 10 Hz下的动态位移输出 Copyright © 2012 Hanspub 35 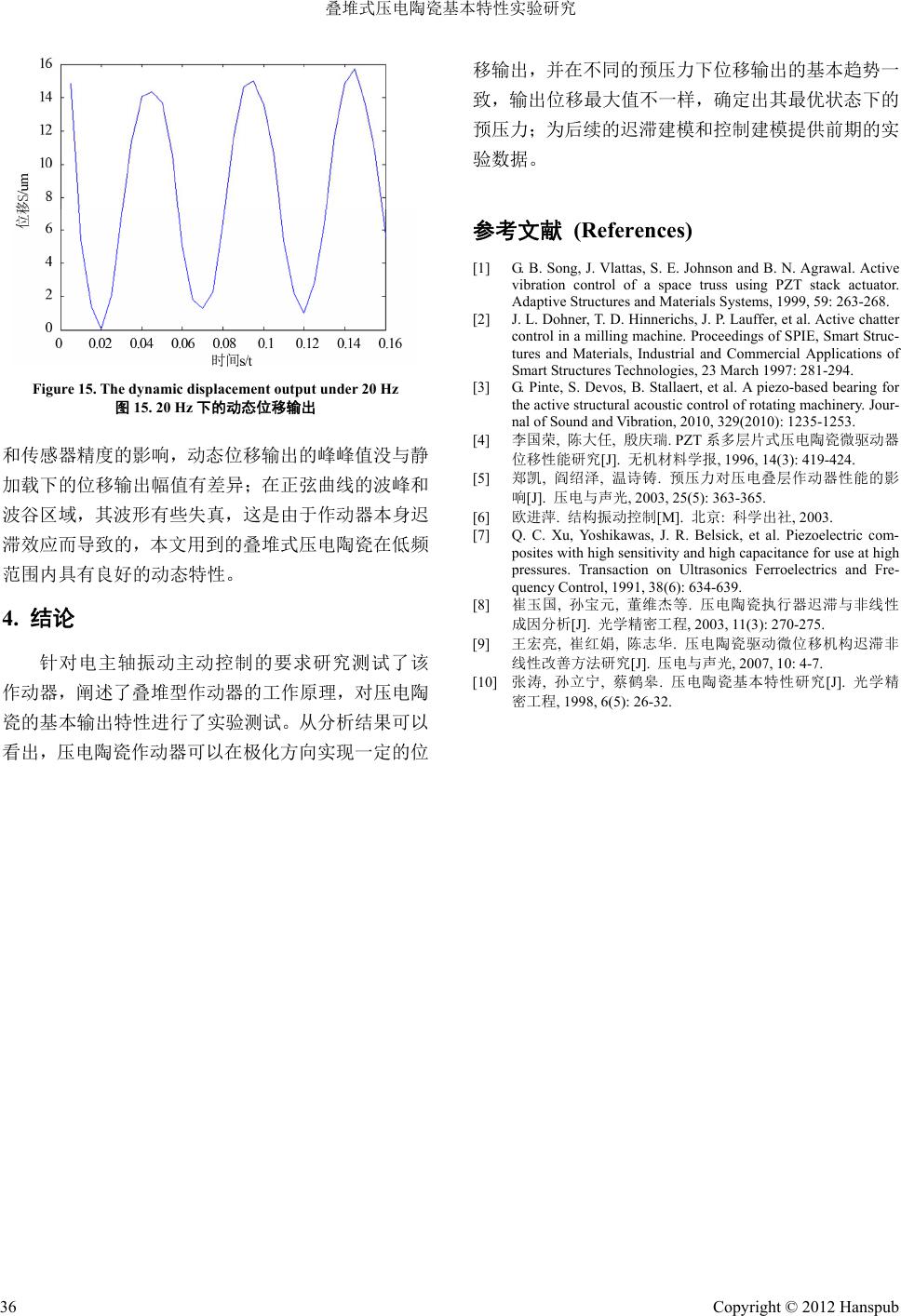 叠堆式压电陶瓷基本特性实验研究 Copyright © 2012 Hanspub 36 Figure 15. The dynamic displacement output under 20 Hz 图15. 20 Hz下的动态位移输出 和传感器精度的影响,动态位移输出的峰峰值没与静 加载下的位移输出幅值有差异;在正弦曲线的波峰和 波谷区域,其波形有些失真,这是由于作动器本身迟 滞效应而导致的,本文用到的叠堆式压电陶瓷在低频 范围内具有良好的动态特性。 4. 结论 针对电主轴振动主动控制的要求研究测试了该 作动器,阐述了叠堆型作动器的工作原理,对压电陶 瓷的基本输出特性进行了实验测试。从分析结果可以 看出,压电陶瓷作动器可以在极化方向实现一定的位 移输出,并在不同的预压力下位移输出的基本趋势一 致,输出位移最大值不一样,确定出其最优状态下的 预压力;为后续的迟滞建模和控制建模提供前期的实 验数据。 参考文献 (References) [1] G. B. Song, J. Vlattas, S. E. Johnson and B. N. Agrawal. Active vibration control of a space truss using PZT stack actuator. Adaptive Structures and Materials Systems, 1999, 59: 263-268. [2] J. L. Dohner, T. D. Hinnerichs, J. P. Lauffer, et al. Active chatter control in a milling machine. Proceedings of SPIE, Smart Struc- tures and Materials, Industrial and Commercial Applications of Smart Structures Technologies, 23 March 1997: 281-294. [3] G. Pinte, S. D evos, B. Stallaert, et al. A piezo-based bearing for the active structural acoustic control of rotating machinery. Jour- nal of Sound and Vibration, 2010, 329(2010): 1235-1253. [4] 李国荣, 陈大任, 殷庆瑞. PZT系多层片式压电陶瓷微驱动器 位移性能研究[J]. 无机材料学报, 1996, 14(3): 419-424. [5] 郑凯, 阎绍泽, 温诗铸. 预压力对压电叠层作动器性能的影 响[J]. 压电与声光, 2003, 25(5): 363-365. [6] 欧进萍. 结构振动控制[M]. 北京: 科学出社, 2003. [7] Q. C. Xu, Yoshikawas, J. R. Belsick, et al. Piezoelectric com- posites with high sensitivity and high capacitance for use at high pressures. Transaction on Ultrasonics Ferroelectrics and Fre- quency Control, 1991, 38(6): 634-639. [8] 崔玉国, 孙宝元, 董维杰等. 压电陶瓷执行器迟滞与非线性 成因分析[J]. 光学精密工程, 2003, 11(3): 270-275. [9] 王宏亮, 崔红娟, 陈志华. 压电陶瓷驱动微位移机构迟滞非 线性改善方法研究[J]. 压电与声光, 2007, 10: 4-7. [10] 张涛, 孙立宁, 蔡鹤皋. 压电陶瓷基本特性研究[J]. 光学精 密工程, 1998, 6(5): 26-32. |