Computer Science and Application
Vol.
09
No.
01
(
2019
), Article ID:
28402
,
9
pages
10.12677/CSA.2019.91003
Abnormal Detection Method Based on Bilateral Space Windows
Can Zhang, Jun Cai
College of Electrical and Information Engineering, Anhui University of Science & Technology, Huainan Anhui

Received: Dec. 25th, 2018; accepted: Jan. 3rd, 2019; published: Jan. 10th, 2019

ABSTRACT
Confronting with the challenge of the difficult interpretation of the abnormal properties in previous works, a novel abnormal detection method based on bilateral space windows is proposed in our work. Firstly, after foreground construction, bilateral space windows are proposed to sample on the boundary of monitoring area, whose features can effectively describe the interesting regions. Secondly, in order to extract the attributions of speed, correlation and time delay, we design sequential cross-correlation measurement and analyze its theoretical and practical characteristics. Finally, we train our abnormal detection model using max margin framework, which considers both attributions of speed, correlation and time delay and additional appearance feature using fast Fourier transform. In the BEHAVE dataset with actual monitoring conditions, our method outperforms state-of-the-art methods both in AP and AUC evaluation. Moreover, even without prior, the method can automatically identify the location of the entrance and exit of the surveillance scene.
Keywords:Abnormal Detection, Bilateral Space Windows, Sequential Cross-Correlation, Context Awareness
基于双侧空间窗的异常检测方法
张灿,蔡俊
安徽理工大学,电气与信息工程学院,安徽 淮南
收稿日期:2018年12月25日;录用日期:2019年1月3日;发布日期:2019年1月10日

摘 要
针对现有异常检测方法难以解释异常属性的问题,本文提出基于双侧空间窗的异常检测方法。首先,在前景检测的基础上,本文对场景边界区域进行双侧空间窗采样,提取双侧空间窗特征;随后,为了提取异常事件的速度属性、相关性属性、时间差属性的提取,本文分析了双侧空间窗的时序互相关理论和实际特性,实现了异常细分属性的描述;最后为了进一步描述目标类别属性,本文使用了基于快速傅里叶变换的外观特征,利用最大间隔思想训练异常检测模型。在真实场景BEHAVE数据库的实验中,可以看出AP和AUC评价指标超出现有对比方法,而且还能在没有先验知识指导的情况下,自动识别出监控场景出入口的位置。
关键词 :异常检测,双侧空间窗,时序互相关,语境发现

Copyright © 2019 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
场景中的异常事件通常伴随着危险和安全隐患,异常检测关注于监控场景中的异常事件识别,已经受到计算机视觉领域的广泛关注 [1] 。但是,由于场景中内容的不同,在缺少异常清晰定义的情况下,如何实现异常的准确识别,仍然是一项重要的挑战。
在事件统计方面,异常可以定义为场景中出现的小概率事件,在此基础上,现有方法关注于不同特征提取方法基础上的小概率模型构建。光流特征作为运动描述被广泛使用,Cong关注于基于光流的运动特征 [2] ,Hassner使用带阈值的光流特征ViF [3] ,Nievas使用SIFT检测点处的光流特征MoSIFT [4] ,Zhang在光流特征的基础上,添加Weber梯度和方向的局部描述子MoWLD [5] 。除了光流特征以外,现有方法还考虑时长特征和场景中群体的分布特征,例如,Li对时间段内的图像序列,进行混合动态纹理特征的小概率建模 [6] ,Hu关注于目标跟踪轨迹方面的异常分析 [7] ,Mehran关注于人群中不同个体的交互关系,构建一种社会力模型 [8] 。上述方法使用手工设计特征,该类特征是否符合场景中处在的客观规律,难以验证,也约束了模型的使用范围。
基于统计学习方法,可以将运动原始特征映射到隐空间,并实现有效的特征编码。稀疏编码是近年来广泛使用的方法,Wang使用结构稀疏保持的编码方式(SSS: structural semi-supervised) [9] ,Babagholami使用概率半监督字典的编码方式(PSS: Probabilistic semi-supervised) [10] ,Zhang进行局部约束的稀疏编码(LSC: Local sparse constraint) [1] 。随着编码效率的提升,现有异常检测方法也改进了分类模型的设计,Wright使用稀疏表达分类器(SR: Sparse representation) [11] ;而且深度学习也逐渐进入该领域,蔡瑞初使用多尺度时间递归神经网络方法 [12] ;Xu提出外感和运动的深度网络结构对异常检测的建模(AMDN: Appearance and Motion Deep Net) [13] 。但是,上述方法仍然将异常事件的属性作为黑盒处理,没有清晰的异常规则定义,实际上在真实的场景监控应用中,难以设置知识规则,也难以根据人类的经验对现有异常检测模型进行拓展。
现有异常检测模型均是基于时空窗的状态分析,但是,难以描述事件中的时间的细节属性。本文针对实际监控的出入口状态分析需求,将采样窗口进一步细分为内侧窗和外侧窗,利用时序相关分析方法,有效实现了速度属性、相关性属性、时间差属性的检测,从而实现对异常事件属性的细分。基于上述分析,本文提出一种基于时序互相关分析的异常检测方法,其主要贡献如下:
1) 通过提出的双侧空间窗特征,利用互相关分析方法,实现进入和离开的异常事件的自动判定。
2) 对场景中异常区域进行双侧空间窗采样,利用时序互相关分析,自动发现并定位监控场景中出入口的语境信息。
3) 根据监控任务的实际需求,将异常模式根据特性细分为:速度属性,出入属性和目标类属性,构建多属性分类器,实现不同人车不同类别目标的异常检测。
2. 时序互相关异常检测
本文的算法处理流程,如图1所示。针对现有异常检测方法无法解释事件属性类型,本文将异常事件描述为速度属性,出入属性和目标类属性的联合判决形式。在前景检测的基础上,首先,进行双侧空间窗特征提取,随后,利用互相关分析方法实现目标的速度特征和相关性特征提取,最终,结合目标外观特征完成异常检测任务。
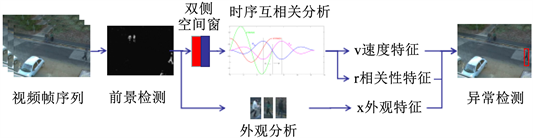
Figure 1. Anomaly detection based on time series cross correlation analysis
图1. 基于时序互相关分析的异常检测
2.1. 基于时序互相关的速度分析
本文提出的双侧空间窗特征建立在前景检测基础上。为了提高前景检测的可靠性,使用HSI颜色空间的帧差方法,HIS图像包含三个色彩通道:
(1)
其主要原因在于目标发生运动时,背景差方法容易受到外部光照的影响,HSI颜色空间,尤其是色调H分量对光照具有较好的不变性。因此,对于给定视频图像帧并转化为HSI图像,通过估计当前帧像素的HSI特征 和前一帧像素的HSI特征 ,比较帧差大小获得前景图像 ,
(2)
为两帧像素的HSI向量的2范数, 为帧差阈值,其取值方法为,首先估计视频帧中最大的帧差 ,并将帧差与最大值比例大于 的像素,认为是显著运动,本文方法中 取值0.3。
针对目标出入属性,本文提出双侧空间窗并通过分析其中前景像素的变化规律,实现目标的速度和出入状态的估计。在每个空间窗中,记录前景像素的和作为局部特征,有
(3)
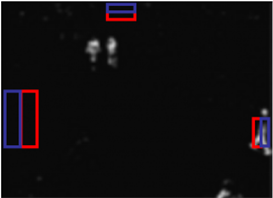
其中D为空间窗,本文针对场景边界使用双侧空间窗,即包含内侧窗 和外侧窗 ,如图2(a)所示。内侧窗(图2(a)红色窗)和外侧窗(图2(a)蓝色窗)尺寸相同,位置相邻。内侧窗和外侧窗根据异常目标类别不同,设置为行人和交通工具两种尺寸。内侧窗和外侧窗在边界框的左右两侧水平相邻,在上下两侧垂直相邻。则此时有内侧窗特征 ,和外侧窗特征 ,并将双侧窗特征记作 。
 (a)
(a)
 (b)
(b)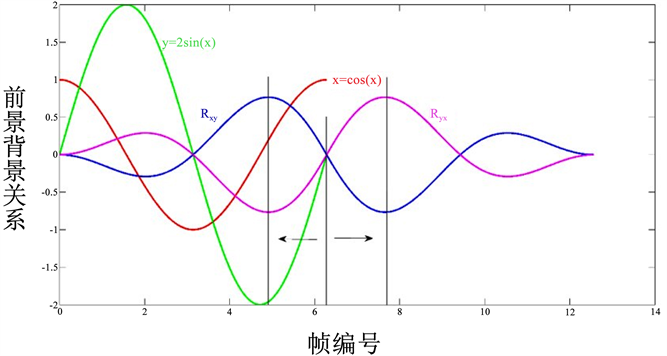 (c)
(c)
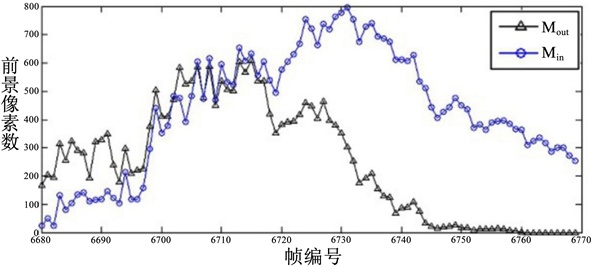
Figure 2. The foreground pixel change of the bilateral space window when target entering the scene, (a) Bilateral space, (b) The foreground of the bilateral spatial window of the scene target changes, (c) Ideally bilateral spatial window correlation
图2. 双侧空间窗及其目标进入场景的前景像素变化,(a) 双侧空间,(b) 场景目标的双侧空间窗前景变化,(c) 理想情况下双侧空间窗相关性
利用双侧空间窗特征估计速度的基本思想是,像素变化的快慢,包含内侧窗和外侧窗。为了避免环境噪声对瞬时速度的影响,采用时间窗 对进行速度属性估计:
(4)
其中 为初始帧, 为时间窗的宽度。图2(b)给出了以时间窗内,内侧窗和外侧窗特征的演化实例,可以看出在目标外侧窗比内侧窗波峰出现时间迟,说明目标先进入内侧窗,后进入外侧窗,目标的状态为离开。
2.2. 基于时序互相关的时间差分析
双侧空间窗特征体现为先后出现的两个波峰,波峰之间的帧编号间隔可以视为时间差,记作 ,为了计算内侧窗和外侧窗的相关性,本文在时间窗下,考虑带时间差的互相关系数,作为互相关度量 :
(5)
其中, 为内侧空间窗的像素数量, 为外侧空间窗的像素数量,互相关度量是时间差 的函数,当波峰相近,波形基本吻合时出现 最大值。我们将最佳吻合的相关性和时间差作为异常事件的相关系数 和时间差属性 ,此时,有
(6)
本文对互相关函数进行理论分析,图2(c)给出了正弦波形下的弧相关系数估计。将图2(c)的绿色曲线和红色曲线作为输入,对于情况内侧窗(绿色曲线)和外侧窗(红色曲线),可以获得不同时间差情况下的相关值,即获得粉色曲线,此时红色曲线延时时间间隔,可以获得最大相关性,即时间差为正值,判断为离开状态。反之,对于情况内侧窗(红色曲线)和外侧窗(绿色曲线),绿色曲线需要提前移动获得最大值,获得蓝色相关性曲线,即时间差为负值,判断为进入状态。因此,相关性分析是一种获得出入属性的判断的有效方法。
2.3. 联合时序互相关和外观特征的异常检测
监控场景中需要明确异常中的目标类型,本文使用快速傅里叶变换特征实现目标的外观特征提取,其主要原因是,快速傅里叶变换不仅实现快速,而且具有较好的循环特性 [14] ,空间窗滑动情况下,能够保证快速傅里叶变换特征具有较好平移不变性,有利训练样本的采集,获得更精确的模型。因此,使用快速傅里叶变换 ,分别对采样窗口 中,HSI色彩空间的各层图像,提取快速傅里叶变换特征 。不失一般性,对视频中的异常样本进行采样,联合双侧空间窗,构建异常属性集合记作 。基于最大间隔分类思想,设计本文异常检测的目标函数为:
(7)
其中, 为异常检测模型参数,其中字母T表示模型参数向量的转置。本文对BEHAVE视频数据库中的异常目标提取属性特征,并随机分配训练集样本和测试集样本,采用10折交叉验证对模型进行训练,通过最小化目标函数获得最佳异常检测模型参数 。获得异常检测模型参数后,异常事件检测的测试过程为,首先根据1.1节,1.2节,1.3节描述,提取异常属性 ,
可疑获得异常检测得分,随后,根据异常模型估计异常得分 。通过设置阈值,可以计
算异常检测的准确率,和查全率,在此基础上,现有异常检测方法中通常考虑不同阈值下的检测效率和演化趋势,因此,本文使用平均准确率(AP: Average Precision)和曲线下方面积(AUC: Area Under Curve)作为评价标准来衡量。
3. 实验
本文的研究对象是监控场景中的异常检测,采用BEHAVE场景数据库,其主要原因是,1) BEHAVE是真实监控视频(包含11,200帧),视频分辨率为480 × 640,可以验证低分辨率事件检测能力,2) 数据库存在外观挑战,选取视频中行人着装与道路、土壤的外观颜色都很相近,并存在场景的光照变化、视频镜头附近的人影噪声等影响。3) 该数据库拍摄的高度较高范围较广,场景视场较宽,事件内容丰富,视频包含真实监控视频遇到的多种情况,例如多人进入、跑步离开等。
3.1. 场景出入口语境发现
本文方法通过互相关性质的分析,可以有效发现目标的事件状态,这突破了现有异常检测方法对属性检测的限制。而且在目标事件状态基础上,即使在没有场景已知信息的情况下,本文提出的双侧空间窗可以对场景边界的出入口进行定位,这可以实现自动识别监控场景的感兴趣区域,有利于后续监控算法的自动化实现。
为了有效实现出入口自动定位,根据出现目标的基本尺寸设置双侧空间窗的大小,具体为行人内侧窗和外侧窗像素尺寸各为80 × 30,交通工具内侧窗和外侧窗像素尺寸各160 × 60。根据监控场景边界进行全遍历,计算出场景过程中出入状态目标的数量,对于目标数量大于3的位置,判定为场景中可行的出入口位置。图3给出了BEHAVE数据库场景中的出入口检测结果,根据场景的特点,BEHAVE场景包含编号为1,2的两个交通工具出入口,编号为3,4,5,6,7共5个行人出入口,BEHAVE场景出入口检测与实际场景的出入口数量和位置一致,全部检测成功。表1给出了对应监控过程中真实出现的目标及相关性分析,说明本文方法可靠有效。

Figure 3. Scene entry and exit position detection based on bilateral space window
图3. 基于双侧空间窗的监控场景出入口位置检测

Table 1. Entrance and exit detection and correlation analysis in monitoring scene
表1. 监控场景出入口检测和相关性分析
3.2. 异常检测
本文对异常检测进行了属性细分,包含速度属性、相关性属性、时间差属性、外观属性,从判断能力上比现有模型更全面,结合本文使用的最大边界分类器的训练过程,可以实现模型的有效训练。本文使用平均准确率(AP: average precision)和曲线下方面积(AUC: Area Under Curve)进行异常检测评价 [1] 。具体来说,本文以0.1为间隔,对0到1的阈值采样11个阈值,分别对每个阈值计算准确率(检测正确的数量/检测出所有的数量)和查全率(检测出所有的数量/真实存在所有异常的数量)。平均准确率(AP)是11个阈值下准确率的平均值,平均准曲率越大说明模型准确性越高。曲线下方面积(AUC)需要使用另一个概念,即第一类错误假阳性率(False Positive)即虚警率,虚警数量是指异常得分大于阈值但并非为异常的事件数量,曲线下方面积越大则模型的准确性越高 [1] 。
本文选择的对比方法包括3类,1) 不同外观特征方法,ViF [3] 使用带阈值的光流特征,MoSIFT + BoW [4] 使用SIFT检测点处的光流特征,MoWLD + SC [5] 在光流特征的基础上,添加Weber梯度和方向的局部描述子,并考虑稀疏编码进行特征变换。2) 不同特征编码方法,MoSIFT + BoW [4] 使用词汇包的编码方式,MoWLD + SC [5] 使用稀疏编码方式,MoWLD + LS [1] 对运动weber局部描述子,进行局部约束的稀疏编码。此外,SSS [9] 使用结构稀疏保持的编码方式,PSS [10] 使用概率半监督字典的编码方式,不同的特征编码方式将原始特征映射到隐空间,提高检测器的判决能力。3) 不同分类判决方法,SRC [11] 使用稀疏表达分类器;AMDN [13] 使用深度结构训练外观和运动特征。通过与选择的方法对比,能够说明本文方法的有效性和优势。表2给出了本文方法和对比方法的实验结果,由于本文方法在外观特征和运动特征基础上,引入了描述时间的速度属性、相关性属性、时间差属性,是一种显式的属性表达,比现有其他特征提取和编码方法更直观有效,因此,本文在BEHAVE真实监控场景中,实现了比现有方法更高的平均准确率。图4真实监控场景BEHAVE数据库给出了异常检测结果,由于目标尺寸的不同,检测结果进一步可以分为交通工具(图4第一行)和行人(图4第二行)。检测结果能够说明,成功识别出各目标进入和离开的位置和时刻。
本文实验工作站配置参数为Intel(R) Core(TM) i7-4770,内存8 GB,CPU为8核3.4 GHz,使用matlab实现。实验时,前景检测耗时0.03秒,相关性分析耗时0.06秒,外观特征提取耗时约0.71秒,从本文方法可以看出外观特征是较为耗时的,而且对异常检测来说,运动特征更为直观有效,因此,本文没有选择HOG,SIFT等耗时较多的特征提取方法,其目的是为了提高异常检测应用的实时性。本文方法的实时性为1.25 FPS (帧每秒),如果仅使用运动特征和相关性分析,本文的实时性为11.1 FPS (帧每秒)。由于matlab是解释性语言,执行过程中缺少编译耗时较多,通过更换实验语言平台可以进一步提高本文方法的实时性。
Table 2. Evaluation of abnormal monitoring of BEHAVE database in real monitoring scene
表2. 真实监控场景BEHAVE数据库异常检测的评价结果

Figure 4. Anomaly detection results of BEHAVE database in real monitoring scene, the first line: transportation (car, bicycle); the second line: pedestrians
图4. 真实监控场景BEHAVE数据库异常检测结果,第一行:交通工具(汽车,自行车);第二行:行人
4. 结论
本文面对实际监控需求,针对现有异常检测方法对事件属性无法准确描述的问题,提出一种基于双侧空间窗的异常检测方法。本文在双侧空间窗特征的基础上,利用互相关分析方法,可以有效获得目标的速度属性、相关属性和时间差属性,上述属性能够满足时间监控的任务需求。本文方法进一步结合外观特征,分析事件中的目标类型,从而有效辨别出交通工具和行为不同种类目标的异常事件。本文方法与现有的不同特征提取、特征编码、分类模型进行比较,实验结果说明本文方法不仅能够快速准确的实现异常检测,在真实场景BEHAVE数据库中,AP和AUC指标超出现有方法,而且还能在没有先验知识指导的情况下,自动识别出监控场景出入口的位置。
文章引用
张 灿,蔡 俊. 基于双侧空间窗的异常检测方法
Abnormal Detection Method Based on Bilateral Space Windows[J]. 计算机科学与应用, 2019, 09(01): 19-27. https://doi.org/10.12677/CSA.2019.91003
参考文献
- 1. Zhang, T., Jia, W., Gong, C., et al. (2017) Semi-Supervised Dictionary Learning via Local Sparse Constraints for Vio-lence Detection. Pattern Recognition Letters, 1-8.
- 2. Cong, Y., Yuan, J. and Liu, J. (2013) Abnormal Event Detection in Crowded Scenes Using Sparse Representation. Pattern Recognition, 46, 1851-1864. https://doi.org/10.1016/j.patcog.2012.11.021
- 3. Hassner, T., Itcher, Y. and Kliper-Gross, O. (2012) Violent Flows: Real-Time Detection of Violent Crowd Behavior. IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Providence, RI, 16-21 June 2012, 1-6.
- 4. Nievas, E.B., Suarez, O.D., García, G.B., et al. (2011) Violence Detection in Video Using Computer Vision Techniques. International Conference on Computer Analysis of Images and Patterns, Springer, Berlin, Heidelberg, 332-339.
- 5. Zhang, T., Jia, W., Yang, B., et al. (2017) Mowld: A Robust Motion Image Descriptor for Violence Detection. Multimedia Tools and Applications, 76, 1419-1438. https://doi.org/10.1007/s11042-015-3133-0
- 6. Li, W., Mahadevan, V. and Vasconcelos, N. (2014) Anomaly Detection and Localization in Crowded Scenes. IEEE Transactions on Pattern Analysis and Machine Intelli-gence, 36, 18-32. https://doi.org/10.1109/TPAMI.2013.111
- 7. Hu, W., Xiao, X., Fu, Z., et al. (2006) A System for Learning Statistical Motion Patterns. IEEE Transactions on Pattern Analysis and Machine Intelligence, 28, 1450-1464. https://doi.org/10.1109/TPAMI.2006.176
- 8. Mehran, R., Oyama, A. and Shah, M. (2009) Abnor-mal Crowd Behavior Detection Using Social Force Model. IEEE Conference on Computer Vision and Pattern Recogni-tion, CVPR 2009, Miami, FL, 20-25 June 2009, 935-942.
- 9. Wang, D., Zhang, X., Fan, M., et al. (2016) Semi-Supervised Dictionary Learning via Structural Sparse Preserving. AAAI, 2137-2144.
- 10. Babagholami-Mohamadabadi, B., Zarghami, A., Zolfaghari, M., et al. (2013) Pssdl: Probabilistic Semi-Supervised Dictionary Learning. Joint European Conference on Machine Learning and Knowledge Discovery in Databases, Springer, Berlin, Heidelberg, 192-207.
- 11. Wright, J., Yang, A.Y., Ganesh, A., et al. (2009) Robust Face Recognition via Sparse Representation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 31, 210-227. https://doi.org/10.1109/TPAMI.2008.79
- 12. 蔡瑞初, 谢伟浩, 郝志峰, 等. 基于多尺度时间递归神经网络的人群异常检测[J]. 软件学报, 2015, 26(11): 2884-2896.
- 13. Xu, D., Yan, Y., Ricci, E., et al. (2017) Detecting Anom-alous Events in Videos by Learning Deep Representations of Appearance and Motion. Computer Vision and Image Un-derstanding, 156, 117-127. https://doi.org/10.1016/j.cviu.2016.10.010
- 14. Henriques, J.F., Carreira, J., Caseiro, R., et al. (2013) Beyond Hard Negative Mining: Efficient Detector Learning via Block-Circulant Decomposition. IEEE International Conference on Computer Vision (ICCV), Sydney, 1-8 December 2013, 2760-2767.