Computer Science and Application
Vol.
12
No.
09
(
2022
), Article ID:
55728
,
12
pages
10.12677/CSA.2022.129212
基于非负矩阵分解的全球贸易缺失数据 填补
宋丛威,张晓明
北京雁栖湖应用数学研究院,北京
收稿日期:2022年8月9日;录用日期:2022年9月7日;发布日期:2022年9月14日

摘要
大数据时代,外贸企业对全球贸易数据高度依赖。但是数据缺失严重,给数据分析带来不便。本文提出用非负矩阵分解填补缺失数据;构造并实现了填补算法。实验通过和线性插值填补法进行对比,证明非负矩阵分解更适合应用于缺失数据填补,同时能够提取主题进出口矩阵,帮助人们理解贸易状况。
关键词
缺失数据填补,非负矩阵分解,Poisson分解,乘法更新规则,全球贸易

Imputation of Missing Data for Global Trade Based on Non-Negative Matrix Factorization
Congwei Song, Xiaoming Zhang
Yanqi Lake Beijing Institute of Mathematical Sciences and Applications, Beijing
Received: Aug. 9th, 2022; accepted: Sep. 7th, 2022; published: Sep. 14th, 2022

ABSTRACT
In the era of big data, foreign trade enterprises are highly dependent on global trade data. However, serious data loss brings inconvenience to data analysis. In this paper, non-negative matrix factorization is proposed to impute the missing data; an imputation algorithm is constructed and implemented. The experiment proves that non-negative matrix factorization is more suitable for imputation of missing data and can extract the topic import-export matrices to help people understand the trade situation by comparing with the imputation method by linear interpolation.
Keywords:Imputation of Missing Data, Non-Negative Matrix Factorization, Poisson Factorization, Multiplicative Updating Rule, Global Trade

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着大数据时代的到来,海关数据也成为研究热点。海关数据目前主要掌控在政府部门手中,尚未被普遍使用。本文研究有较高的时效性。
全球贸易数据是海关数据的重要组成部分。外贸企业希望利用全球贸易数据指导其生产活动。然而某些国家的政府出于各种理由瞒报或误报贸易数据,导致全球贸易数据不完整。数据缺失可能对外贸企业做出合理决策造成阻碍。本文利用机器学习的方法填补缺失数据。填补结果可供企业利用。
数据抓取自国际数据网站https://www.trademap.org/Index.aspx。原始数据的存储形式为20个20 × 20的矩阵,可表示为
其中元素Aa,b,t表示国家a国家b,在t (从2001年到2020年)年份的某货物(编号72)出口总量。本文称At为(进)出口矩阵,等价于一个加权有向图,可称为“(进)出口图”。当绘制矩阵热力图时,进出口国家按照给定顺序排列,行为出口国,列为进口国。
本文的任务就是要填补数据At的缺失部分。At中所有0值均被假定为缺失数据。
所有数据会事先处理成矩阵形式。首先将每个出口矩阵拉直成400维行向量。但其中20个国家有自己到自己的“进出口数据”即0,这不是真实的。因此拉直时需要去除这20个0,得到380维向量——对应一个非自反的有向图。最后组合成一个形状为20 × 380的矩阵X。这个矩阵的每一行代表某年某货物出口状况。若出口矩阵的元素Aa,b,t存储在行向量的第j位,则第j个属性名为“a − b”,其中a − b分别为出、进口国名称。
注 特别强调,本文所有数据具有相同单位,但不指明该单位。此外,不透露编号为72的货物的真实名称。
正文组织如下。第二节介绍非负矩阵分解(NMF) [1] [2] [3] [4] [5] 及基于其上的缺失数据填补的原理 [6]。给出基于Poisson分解(PF) [7] [8] 的统计学解释。第三节,根据已知的原理,设计缺失数据填补算法。算法的设计受NMF的乘法更新规则的启发。最后,实验结果展示在第四节,包括填补结果,误差计算和模型比较。
表示非负数。矩阵转置记为AT。P(λ)表示均值为λ的Poisson分布 [9] ,B(p)表示Bernoulli分布。矩阵的Frobenius范数定义为: 。只要没有分歧,所有累加符号都不指明求和范围,如 。
2. 数据填补原理
2.1. NMF简介
非负矩阵定义为其所有元素非负的矩阵。所有大小为m × n的非负矩阵的集合记为 。一个非负矩阵 有如下近似分解:
(1)
其中W和H分别属于 和 ,一般 。这个近似分解称为NMF。
(1)的等价写法是,
,其中xi是X的第i行,hk是H的第k行。这意味着任何 上的样本xi近似为基{hk}的线性组合 [5]。
上的样本xi近似为基{hk}的线性组合 [5]。
注 补充说明一下,H或其行向量组不一定是基,因为没有要求它具有独立性。这里还是习惯称它为基。
注 有的作者把NMF写成X~WHT。有的把W看成基。这些都不是本质性的。
注 人们习惯用X的行向量表示单个样本;这些行向量构成的矩阵表示整个数据集。在本文中,单个样本对应一个出口矩阵。
给定损失函数l。求解下述优化问题可得W,H的估计。
(2)
常用损失函数选为平方误差 或者散度 。本文选择后者。
散度下的优化问题和所谓的Poisson分解模型等价:
(3)
即在已知W,H的条件下,xij独立地服从Poisson分布P((WH)ij)。(2)的解正好是(3)的极大似然估计。此外,本文的X是非负整数值,其经济学意义就是货物金额的计量,而且有固定的单位。假定它服从Poisson分布是非常合理的。本文把PF作为NMF模型的统计学解释。
H的行向量相当于SVD中的特征向量,在本文中,称为“主题向量”,反映进出口的内在规则。某年某货物的进出口情况由这些规则非负线性求和得到。H的行向量也会重组为出口矩阵——主题出口矩阵。重构结果 称为重构出口矩阵。
2.2. 非负矩阵三因素分解
本文把NMF写成非负矩阵三因素分解(NMTF) [10] 的形式。NMTF是NMF的一个变种。其分解形式如下
(4)
其中所有矩阵非负。本文规定,W的所有列向量求和为1,H的所有行向量求和为1,而D是对角矩阵,其对角线元素降序排列。获得NMTF形式的方式,可以是为其中的三个矩阵构造乘法更新规则,也可以先通过NMF得到W,H,再进行归一化操作,得到(4)中的W,H,而归一化系数构成对角矩阵D。(4)中的H依然称为主题向量,WD是分解系数,而D中元素反映对应主题向量的重要性。类似于主成分分析(PCA),可严格定义第k个主题的重要性:
(5)
利用重要性的概念,可发现最值得关注的主题出口矩阵,并确定分解的秩q。
2.3. NMF缺失数据填补原理
如果X包含缺失值,那么不能直接进行NMF分解。需要用合理的办法补全缺失值。有趣的是,NMF本身就有填补缺失值的功能。
注 本文X不存在整行或整列的缺失情况。否则算法无法正常执行。而且这种情况应该需要进行预测,而不是补全。
设X'为X的填补结果,即缺失位置补上合理数字,非缺失位置与X值相等。X缺失情况用缺失矩阵R表示,其中
(6)
每一种填补,都有对应的NMF分解X'~WH,并产生一个误差 。合理的填补应该使这个误差最小。于是,缺失数据填补转化为下述优化问题。
(7)
其中X'是对X的某个填补结果,而W,H是非负矩阵,且仅当Rij = 0时,
(8)
为了提高拟合性能,在(7)的基础上加入正则项:
(9)
其中αW,αH是合理的正则项系数。
注 多数文献把正则项写成 的形式。这不是本质性的。
实际上,PF更容易给出数据缺失模型的统计学解释:
(10)
而当Rij = 0时,没有观测到Xij的样本。算得PF模型的对数似然为(已省略次要常数)
(11)
其中参数W,H的极大似然估计就是(7)的解。对PF来说,填补过程可以理解成生成过程: ,其中Rij = 0。
最后,填补值 应该都是非负整数。这里两种处理方法:用Poisson分布生成X',其中X'一定是整数值的;若直接用NMF的重构矩阵WH,则因为其不一定是整数值的,所以需要进行取整处理。
注 X不能出现整行整列缺失的情况,否则(7)无法正常填补所有缺失值。
3. 算法设计与实现
3.1. NMF缺失数据填补算法
(7)相当于一个加权损失函数,其中缺失数据的权重为0: 。而标准的NMF算法很容易改造成加权形式 [5] [11] [12]。
和标准的NMF一样,W,H需要用迭代方法近似求解。迭代算法就是循环执行W,H的乘法更新规则 [3] [4] [5]。在散度损失下,乘法更新规则为:
(12)
其中 。
(12)是加权NMF乘法更新规则的加权形式。和标准NMF的乘法更新规则相比,(12)增加了一次和权重矩阵的Hadamard乘法(点态乘法)运算,故其计算复杂度和标准NMF相当。在填补的情形中,R就是填补矩阵。当R的所有元素为1时,退化为标准NMF。
考虑正则项后,本文对(12)进行如下改进:
(13)
其中αW,αH,α是三个合理的非负超参数。α可以调节迭代速度,还可以避免除数为0的错误;αW,αH是正则项系数。
NMF填补算法
输入有缺失数据的X,输出W,H和填补结果X'
1. 初始化:用对每一列数据选择一个合理常数填补得到X',对X'执行NMF得到W,H初始值
2. 用(12)或(13)计算更新W,H
3. 重复执行2直到收敛
4. 计算WH,X的缺失部分用WH填补得到X' (必要时,对填补结果进行整数化处理)
3.2. 程序实现
本文的算法用Python3.8实现,运行于MacOS10.15上。程序设计遵从scikit-learn API设计原则 [13]。事实上,加权NMF (缺失数据填补NMF)直接继承自scikit-learn的NMF类,并重写fit等主要方法。
源代码、数据和实验结果均托管在https://gitee.com/williamzjc/nmf-missing-data上。
4. 实验
我们用一个数组存储2001~2020年编号72的货物的贸易数据。根据前文所述,数组可被表示为大小20 × 380的正整数值矩阵X。缺失数据约占4.4%。主题个数选为q = 3。
实验分两个大部分。第一部分是直接对缺失数据填补。第二部分通过进行人为的随机缺失把已知数据分成训练数据和测试数据。测试数据可用来估计预测误差,并和插值型填补法进行比较。
4.1. 填补结果
用本文算法对X进行填补。因为数据量较大,所以表1只列出2001年部分缺失数据的填补值,其余见本文提供的Gitee链接。

Table 1. The filling values of the missing data in 2020
表1. 2020年缺数数据填补值
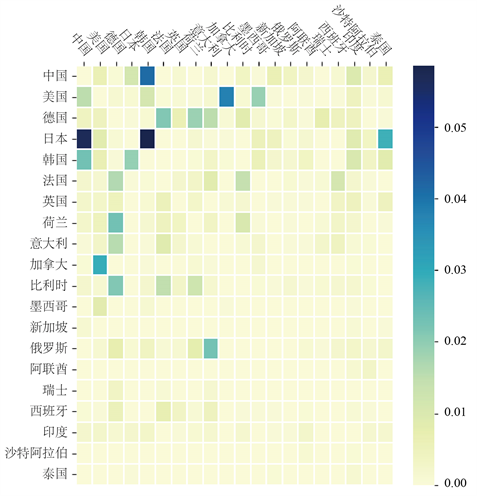
图1是一个直观展示填补效果的热力图,其中只显示缺失数据的填补值。热力图可以使我们直观了解出口矩阵的基本性质。
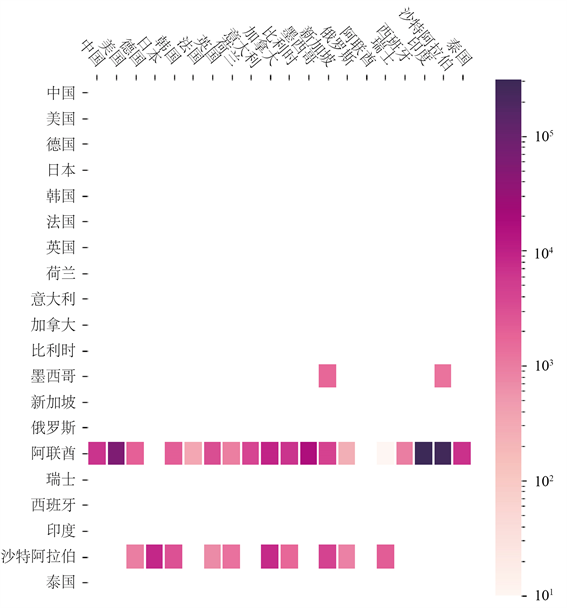
Figure 1. Heat map of the completion values in the import-export matrix (in 2020)
图1. 进出口矩阵(2020年)中填补值热力图
正如前文所述,重要性系数可以帮助我们发现值得关注的主题出口矩阵。根据图2,选择q = 4是非常合理的。这也就是说,所有出口矩阵都近似地是三个主题出口矩阵的非负线性组合。
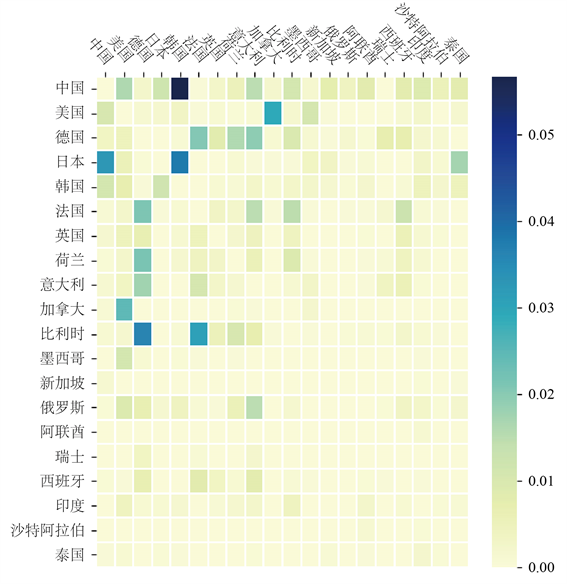
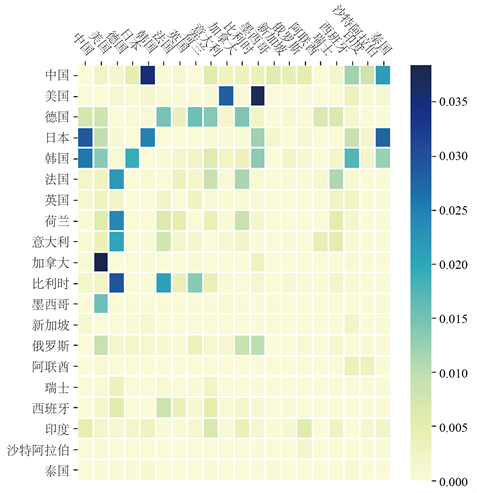
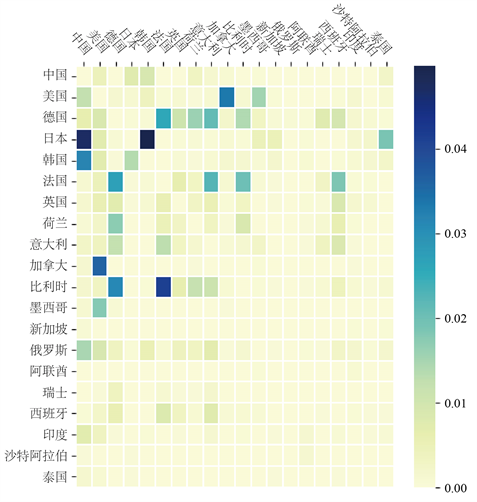
NMF填补算法的结果中包含了主题出口矩阵。根据设置,一共有4个主题出口矩阵(见图3)。
最后对主题出口矩阵做一个直观的解释:第一个主题出口矩阵主要反映中国向韩国出口情况;第二个主要反映亚洲各国之间、欧洲各国之间和北美洲各国之间的贸易,且出口热力图展现出明显的对称性;第三个主要反映日本向亚洲各国出口的贸易;第四个主要反映亚洲各国之间的贸易,以日本为主。

Figure 2. The 20 significance coefficients
图2. 20个重要性系数
 (a)
(a)
 (b)
(b)
 (c)
(c)
 (d)
(d)
Figure 3. The most four significant topic export matrices (normalized)
图3. 最重要的4个主题出口矩阵(已归一化)
4.2. 填补误差
4.2.1. 每年平均预测误差比较
我们把X中的所有元素分成三部分:训练数据、测试数据、缺失数据。
如前所述,缺失数据约占4.4%。测试数据是从已知数据(约占95.6%)中分离出来的,用来估计误差,评判模型性能;也就是说已知数据包含训练数据和测试数据。从算法角度讲,测试数据也是缺失数据,因为训练阶段没有直接用在参数估计上。对缺失数据进行填补时,我们会用到所有已知数据,而且只能给出填补值,不知道真实误差。我们用下述公式直观解释数据的划分:
数据 = 已知数据 + 缺失数据 = 训练数据 + 测试数据 + 缺失数据
注 这里的数据指X中的元素,而不是X的行向量或整个矩阵。
缺失矩阵R可区别已知数据和缺失数据。测试和训练都是对Rij = 1的数据进行的。我们随机删失10%的数据,作为测试数据。此操作用随机缺失矩阵M表示,满足Mij~B (0.9)。若原数据的缺失矩阵用R表示,则训练时的缺失矩阵为MR。因此,训练数据占已知数据的90%,约占全数据的90% × 95.6%。
三种模型每一年的误差如图1所示。(线性)插值填补对每列数据进行线性插值,会在两个已知数据中间形成一个等差数列,显然是一种过于简陋的填补方法。类似也可以构造二次函数插值填补,不过高次插值会产生负数值,需要额外处理。本文不会在这方面花费篇幅,只选用线性插值法。
对于测试数据(即满足Mij = 0,Rij = 1的Xij),我们知道缺失部分的实际值。因此,定义每个年份缺失数据的填补值和实际值相对误差:
(14)
其中 为Xij的填补值。根据这个定义,测试误差也称为填补误差。它比训练误差,即(7)或(11)的函数值,更能反映算法性能。

Figure 4. Comparison of the filling errors
图4. 填补误差比较
上述程序将被运行150次。每个年份都算得150个误差,然后我们取其平均值作为最终的误差值。每次运行,随机缺失矩阵M都会被重新生成,避免出现样本偏差。图4表明,在多数年份,NMF填补法的测试误差明显小于插值填补法的测试误差;只有在个别年份,NMF填补法稍微劣于插值填补法;正则化和无正则化的NMF填补误差比较接近,但是通过计算均值,发现正则化确实起到了减少过拟合现象的作用。正则项系数设为 。
4.2.2. 总误差比较
下面用公式 计算总误差,并比较算法的总体性能。结果见表2。正如前文所述,正则化减少了过拟合现象,降低了总误差。
Table 2. Comparison of the performance of the models (Note that the linear interpolation filling method has no learning process and no training error)
表2. 模型整体性能对比(注意线性插值填补法没有学习过程,不存在训练误差)
5. 结束语
本文用NMF对国际贸易缺失数据进行填补。实验证明NMF填补法的性能显著优于插值填补法。本文还增加了正则项,进一步降低了填补误差。
除了非负约束,NMF的基H本身没有结构限制(至多只有正则项的限制)。H的结构应该包含某种先验知识,即主题出口矩阵结构上的限制。
为了限制H的结构,可以考虑使用张量分解:
其中 , 分别是20,20维向量,向量张量积运算 。也就是说基向量本质上是两个向量的外积。如果不对进出口数据做向量化处理,那么有矩阵 ,其张量表示为
其中W,H(1),H(2),分别是向量族{wk}, , 构成的矩阵。这就是著名的CP分解 [14] [15] [16]。因为原始数据显然可以看作一个3阶张量,其中张量的三个维度(mode)分别为年份、出口国和入口国,所以我们预期可构造出基于张量分解的更有效的填补算法。这种分解方法不仅在数据的表示上更为自然,而且减少了参数数量,避免过拟合。
目前,NMF填补法仅应用于72号货物的进出口数据。未来,我们会将其应用于所有进出口数据。利用张量分解方法,可以同时对所有数据进行处理。还可以考虑迁移学习的方法。将目前得到的结果迁移到其他数据。
此外,我们会重新考虑X的分布。本文假设X的元素服从Poisson分布。但也可改用0-膨胀Poisson分布,非负二次分布等 [7] [8]。还可以为W,H设置先验分布 [17] ,而先验分布起到正则项的作用。
基金项目
浙江省自然科学基金(LQ19F050004)。
文章引用
宋丛威,张晓明. 基于非负矩阵分解的全球贸易缺失数据填补
Imputation of Missing Data for Global Trade Based on Non-Negative Matrix Factorization[J]. 计算机科学与应用, 2022, 12(09): 2094-2105. https://doi.org/10.12677/CSA.2022.129212
参考文献
- 1. Hastie, T., Tibshirani, R. and Friedman, J. (2009) The Elements of Statistical Learning. 2nd Edition, Springer, Berlin, 44-49. https://doi.org/10.1007/978-0-387-84858-7
- 2. Wang, Y.X. and Zhang, Y.J. (2013) Nonnegative Matrix Factorization: A Comprehensive Review. IEEE Transactions on Knowledge and Data Engineering, 25, 1336-1353. https://doi.org/10.1109/TKDE.2012.51
- 3. Brouwer, T. (2017) Bayesian Matrix Factorisation: Inference, Priors, and Data Integration. University of Cambridge, Cambridge.
- 4. Gouvert, O., Oberlin, T. and Fevotte, C. (2020) Negative Binomial Matrix Factorization. IEEE Signal Processing Letters, 27, 815-819. https://doi.org/10.1109/LSP.2020.2991613
- 5. Simchowitz, M. (2013) Zero-Inflated Poisson Factorization for Recommendation Systems. Princeton Department of Mathematics, Princeton. https://msimchowitz.github.io/JuniorPaper.pdf
- 6. Poisson Distribution. https://en.wikipedia.org/wiki/Poisson_distribution
- 7. Yoo, J. and Choi, S. (2009) Probabilistic Matrix Tri-Factorization. IEEE International Conference on Acoustics, Speech, and Signal Processing, Taipei, 19-24 April 2009, 1553-1556. https://doi.org/10.1109/ICASSP.2009.4959893
- 8. Kim, Y. and Choi, S. (2009) Weighted Nonnegative Matrix Factorization. 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, 19-24 April 2009, 1541-1544. https://doi.org/10.1109/ICASSP.2009.4959890
- 9. Zhang, S., Wang, W., James, F.J. and Makedon, F. (2006) Learning from Incomplete Ratings Using Non-Negative Matrix Factorization. Proceedings of the 2006 SIAM International Conference on Data Min-ing (SDM), Bethesda, 20-22 April 2006, 549-553. https://doi.org/10.1137/1.9781611972764.58
- 10. Buitinck, L., Louppe, G. and Blondel, M. (2013) API Design for Machine Learning Software: Experiences from the Scikit-Learn Project. ECML PKDD Work-shop: Languages for Data Mining and Machine Learning, Prague, September 2013, 108-122.
- 11. Harshman, R.A. (1970) Founda-tions of the PARAFAC Procedure: Models and Conditions for an “Explanatory” Multimodal Factor Analysis.
- 12. Kim, J., He, Y. and Park, H. (2014) Algorithms for Nonnegative Matrix and Tensor Factorizations: A Unified View Based on Block Coordinate Descent Framework. Journal of Global Optimization, 58, 285-319. https://doi.org/10.1007/s10898-013-0035-4
- 13. Kolda, T.G. and Bader, B.W. (2009) Tensor Decompositions and Applications. SIAM Review, 51, 455-500. https://doi.org/10.1137/07070111X
- 14. Cichocki, A., Zdunek, R., Phan, A.H. and Amari, S. (2009) Nonnegative Matrix and Tensor Factorizations: Applications to Exploratory Multiway Data Analysis and Blind Source Separation. John Wiley & Sons, Ltd., Hoboken. https://doi.org/10.1002/9780470747278
- 15. Lee, D.D. and Seung, H.S. (2000) Algorithms for Non-Negative Matrix Factoriza-tion. Neural Information Processing Systems 2000, Vol. 13, 556-562.
- 16. Lin, C.J. (2007) On the Convergence of Multiplicative Update Algorithms for Nonnegative Matrix Factorization. IEEE Transactions on Neural Networks, 18, 1589-1596. https://doi.org/10.1109/TNN.2007.895831
- 17. Hoffman, M.D. (2012) Poisson-Uniform Nonnegative Matrix Factorization. IEEE In-ternational Conference on Acoustics, Speech and Signal Processing, Kyoto, 25-30 March 2012, 5361-5364. https://doi.org/10.1109/ICASSP.2012.6289132
附录
乘法更新规则(12)的矩阵形式为,
其中 , 分别是Hadamard乘法、除法运算,α为非负超参数。矩阵形式可以用Python数值计算库numpy轻松实现。在矩阵形式上加入正则项也是非常容易的。本文源代码就是基于这个形式。读者可以根据自己的风格和掌握的计算机语言实现或改进乘法更新规则。