Mechanical Engineering and Technology
Vol.3 No.02(2014), Article
ID:13756,7
pages
DOI:10.12677/MET.2014.32009
The Research of dSPACE Based on Hardware-in-the-Loop Simulation in Electro-Hydraulic Servo Control
China North Vehicle Research Institute, Beijing
Email: jyfeng201@163.com
Copyright © 2014 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received: Apr. 22nd, 2014; revised: May 25th, 2014; accepted: Jun. 3rd, 2014
ABSTRACT
The electro-hydraulic servo control algorithms are always achieved in the way of program, but the period of the project is long, and the process is complex because of hard working programming. A dSPACE-based hardware-in-the-loop simulation system is presented in this paper to demonstrate the direct use of MATLAB/Simulink in real-time control. Through the combination of these tools, an electro-hydraulic servo control platform based on dSPACE system is developed. The research of electro-hydraulic servo control is performed on this platform, and by the use of ControlDesk we can tuned the control parameters on line to adjust the performance of real-time system. The experiment result verified the reliability of the platform, which offers foundation for the design of more complex control algorithms.
Keywords:Electro-Hydraulic Servo Control, dSPACE Platform, Hardware-in-the-Loop Simulation, MATLAB/Simulink

基于dSPACE半实物仿真的电液伺服控制研究
蒋云峰,江 磊,许 威
中国北方车辆研究所,北京
Email: jyfeng201@163.com
收稿日期:2014年4月22日;修回日期:2014年5月25日;录用日期:2014年6月3日

摘 要
电液伺服控制算法一般采用软件编程的方法实现,其开发过程复杂,代码编写工作繁重,开发周期长。本文介绍了基于dSPACE的半实物仿真技术,利用MATLAB/Simulink的系统建模方法和dSPACE系统的软硬件环境,开发出以dSPACE为核心的电液伺服控制实验平台,在该平台上进行了电液伺服控制的试验研究,并利用ControlDesk进行了在线调参。实验结果验证了该实验平台的可靠性,并为研究更加复杂的控制算法提供了基础。
关键词
电液伺服控制,dSPACE实验平台,半实物仿真,MATLAB/Simulink

1. 引言
在通常以DSP或者单片机为控制器进行伺服控制器算法的开发过程中需要编写大量的代码,而且修改算法还需要更多的时间来更改系统的软硬件,因此开发周期相对较长,不利于新型算法的快速开发和应用。而采用MATLAB等纯数字离线仿真工具,则无法考虑到各种硬件实时在线的因素,故采用这种纯软件仿真得到的控制算法在实际工程中无法取得理想的效果。因此,对于进行控制算法研究的工程师而言,需要有一个方便而快捷的途径,可以将他们用控制系统设计软件(如MATLAB)开发的控制算法在一个实时的硬件基体上实现,以便观察与实际的控制对象相连时控制算法的性能;同时,如果控制算法不理想,还可以很快的修改算法,反复试验直到找到理想的控制方案。
dSPACE实时仿真系统为上述问题提供了有效的解决方案,它是基于MATLAB/Simulink开发的软硬件工作平台,具有实时性强、可靠性高、扩充性好等优点。作为开发平台,dSPACE能将MATLAB中设计的复杂控制算法自动转化为实时C代码,并实现一键下载到原型样机中运行从而对算法进行验证[1] [2] 。
2. dSPACE系统简介
dSPACE半实物仿真平台是由德国dSPACE公司开发的一套基于MATLAB/Simulink的控制系统在实时环境下的开发及测试的工作平台,实现了和MATLAB/Simulink的无缝连接。dSPAC系统主要由2部分组成:1) 硬件系统;2) 软件环境。
dSPACE硬件系统的主要特点是具有高速计算能力,并配备了丰富的I/O支持,用户可以根据需要进行组合,本系统采用的硬件配置板卡包括处理器板DS1005、A/D转换板DS2003和D/A转换板DS2103。
dSPACE软件环境具有强大的功能,可以很好的完成控制算法的设计、测试和实现,可以方便的实现代码生成/下载和试验调试等工作。dSPACE软件环境主要由MATLAB/Simulink和ControlDesk组成。激励信号、数据处理和控制器设计由MATLAB/Simulink完成,调试由ControlDesk实现。
dSPACE实时仿真系统自问世以来就以它的种种优势得到了专家和技术人员的普遍认可和欢迎。它使控制系统的设计开发,仿真测试更加简便可靠,快速易行,也使控制系统的算法仿真测试研究达到了更高效,更值得信赖的新平台。由于其无可比拟的优越性,现已广泛应用于航空航天、汽车、发动机、电力机车、机器人、驱动及工业控制等领域,越来越多的工厂、学校及研究部门开始用dSPACE解决实际问题[3] [4] 。
3. 仿真平台组成
3.1. 组成
半实物仿真平台主要由主控计算机、仿真计算机、A/D接口、D/A接口、伺服放大器、电液伺服阀、液压油缸、位移传感器以及相关电源设备等组成,如图1所示。
其中控制计算机用仿真实物实现,即用dSPACE标准组件作为控制计算机的快速原型机,实现控制计算机的功能。仿真计算机通过A/D、D/A等输入输出口与被控对象实物进行交互,实现数字控制器与外界设备的信息交换。
3.2. 主控计算机
整个仿真系统的上位机是主控计算机,它安装有MATlAB7.1系列软件、dSPACE软件,用于构建控制系统Simulink框图、进行系统参数优化、控制仿真过程、编译下载仿真软件、输入输出仿真结果等。
根据控制系统设计和建模结果,利用MATLAB/Simulink构建系统数字仿真框图,进行数字仿真和控制参数优化。在数字仿真的基础上,利用dSPACE提供的RTI软件,将控制器控制方程的Simulink框图生成实时代码并自动下载到dSPACE快速原型机中。用dSPACE提供的综合试验与测试环境管理软件ControlDesk实现试验过程的控制和参数调整。该软件环境可以方便地实现代码生成、下载和试验调试等工作[5] 。
3.3. 仿真计算机
用dSPACE标准组件系统DS1005处理器板作为仿真计算机,用于模拟控制器。DS1005处理器与主控计算机之间用网线连接交换数据。
DS1005板主频1 GHz;片内数据和指令缓存均为32 K words;通过32位PHS总线可管理16块I/O板,并且具有相当强的计算能力。由于PHS总线是专门为实时应用设计,所以它不存在其他外部传输协议的总线所存在的内含软件问题。
3.4. 输入输出接口
为了满足半实物仿真需要,采用了DS2003A/D转换板和DS2103D/A转换板与实物相连,主要技术特性如表1和表2所示。这种板卡具有足够高的精度,能真实有效地传递数模信号,不会给仿真系统带来误差[6] 。
4. 基于dSPACE的半实物仿真技术
在很多实际过程中,不可能准确获得系统的数学模型,所以也就无从建立起仿真模型框图;有时由于实际模型的复杂性,建立起来的模型也不准确,所以需要将实际系统对象原型放置在仿真系统中进行仿真研究。这样的仿真经常称为“硬件在回路”(hardware-in-the-loop,简称HIL)的仿真,我们又常称之为半实物仿真。因为这样的半实物仿真是针对实际过程的仿真,又是实时进行的,所以有时还称为实时仿真[7] 。
在实际应用中,半实物仿真通常有两种情况:第一种情况常见于一般的工业控制中,可以用计算机快速地建立其控制器模型,而将受控对象作为实物放置在仿真回路中,构造起半实物仿真的系统,这个过程我们称之为快速原型设计;另一种情况多用于航空航天领域,控制器采用实物,而受控对象使用数学模型,例如导弹发射,因为各种因素考虑不可能每次发射实弹,而需要用其数字模型来模拟导弹本身的过程,这时为了测试发射台的可靠性,通常需要使用真正的发射台,从而构成半实物仿真回路。本文
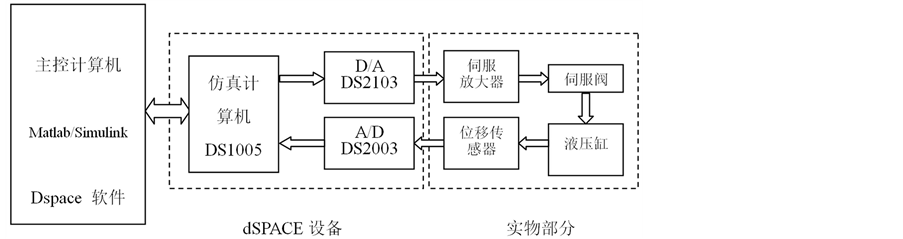
Figure 1. The principle block diagram of hardware-in-loop simulation based on dSPACE
图1. 基于dSPACE的半实物仿真平台原理框图

Table 1. The technology characteristics of DS2003 A/D card
表1. DS2003A/D板的技术特性
Table 2. The technology characteristics of DS2103 D/A card
表2. DS2103D/A板技术特性
所侧重研究的半实物仿真局限于前一种情况。
在控制系统日益复杂,人们对控制系统性能要求越来越高的今天,用离线仿真验证控制系统越来越不能满足人们设计的需求,在线仿真逐步进入控制系统设计领域,它的最大优势在于仿真结果的验证过程是直观的,因为设计出的控制器可以直接对实际受控对象进行控制,所以可以立即得出对其控制效果的评价。dSPACE实时仿真系统是半实物仿真研究良好的应用平台,它提供了真正实时控制方式,允许用户真正实时地在线调整控制器参数和运行环境,并提供了各种各样的参数显示方式,适合于不同的需要。
本文所研究的半实物仿真技术主要是应用dSPACE系统仿真控制器,实现控制器的功能,控制对象采用实物,整个半实物仿真系统由控制系统设计平台MATLAB/Simulink、dSPACE实时仿真系统及外部真实环境和设备组成,其中RTI(Real-Time Interface)是连接dSPACE实时系统与MATLAB/Simulink的纽带,用户可以通过对RTI库中的模型与MATLAB/Simulink的配合使用,设计控制器的Simulink模型,通过对RTW(Real-Time WorkShop)进行扩展,可实现从Simulink模型到dSPACE实时硬件代码的无缝自动下载,dSPACE硬件负责与外部设备连接,交互控制信息与反馈信息。测试软件提供对实验过程的综合管理,在线调整参数,建立虚拟仪表,实时观测控制效果。
5. dSPACE在电液伺服控制研究中的应用
电液伺服控制是基于液压传动技术与自动控制技术上发展起来的新兴技术,它利用其中的关键元件——电液伺服阀实现了电、液转换,使小功率的电信号控制了大功率的液压元件,应用非常广泛。电液伺服系统具有尺寸小、反应速度快、抗负载刚度大等优点,可以快速准确地复现输入规律。液压伺服控制系统应用于各种要求反应迅速精确的大功率自动控制系统中,如:飞机的助力器、舵机和机器人的关节驱动等。电液伺服控制系统的结构框图如图2所示。
电液伺服系统是一个非线性不确定性系统,难以建立其精确的数学模型。本文采用基于dSPACE的半实物仿真技术,通过dSPACE实时硬件将伺服阀、液压缸等实物置于整个控制回路当中,利用dSPACE仿真其控制器,实时调整其控制参数,验证和观测控制器算法的控制效果,从而将其应用于实际系统当中,这样就避免了伺服阀及液压缸建模的不准确性对系统误差及控制精度的影响[8] 。
电液伺服控制器的算法根据实际的需要采用数字PID调节器,其控制算法如下式所示:

式中: 为当前周期的误差,
为当前周期的误差, 为上一周期的误差。
为上一周期的误差。
在Simulink下根据上式可以很容易的建立PID控制器的模型,如图3,图4所示。
在建立好控制系统半实物仿真模型之后,就可以在MATLAB/Simulink下对其进行代码生成、编译及下载了,而dSPACE系统的ControlDesk软件则可以用来完成参数调整和信号监视的任务。ControlDesk的功能主要有三点:第一,在ControlDesk中,可轻松利用Windows拖放方式进行目标程序下载;第二,用户可采取拖放方式非常方便地从ControlDesk仪表库中选择元件,建立所要的虚拟仪表。建立的虚拟仪表可实现实时数据的交换,实时曲线的跟踪以及参数的修改等功能;第三,通过使用拖放操作建立变量与虚拟仪表之间的联系,不仅能进行一般变量的访问而且能进行与实时操作相关的其他操作变量访问,如:中断优先级、采样时间与程序执行时间等。本实验建立的ControlDesk软件界面如图5所示,该界面中,我们将需要调试和观测的变量与界面中的虚拟仪表进行数据链接,之后就可通过对虚拟仪表进行调节从而达到在线调整Kp、Ki、Kd等控制参数,观测控制效果和输出响应曲线的目的。
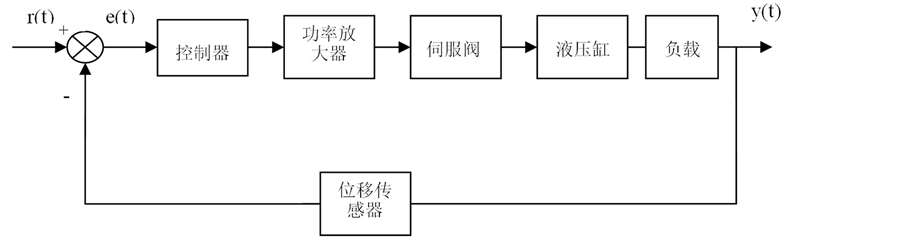
Figure 2. The block diagram of electro-hydraulic servo control system
图2. 电液伺服控制系统的结构框图
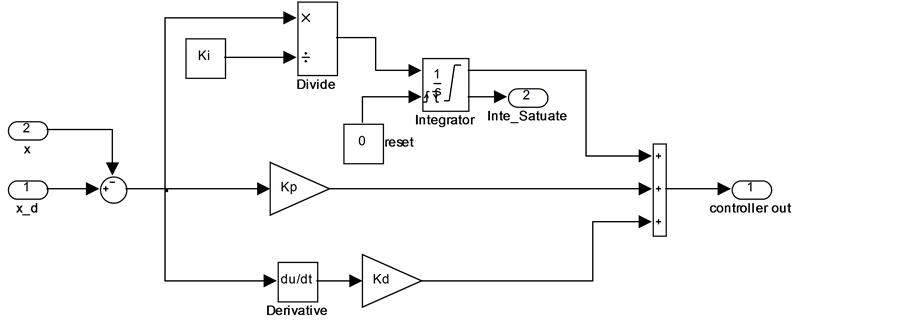
Figure 3. The PID controller modeling chart of electro-hydraulic servo control system
图3. 电液伺服控制系统PID控制器模型框图

Figure 4. The hardware-in-loop simulation modeling chart of electro-hydraulic servo control system
图4. 电液伺服控制系统半实物仿真模型框图
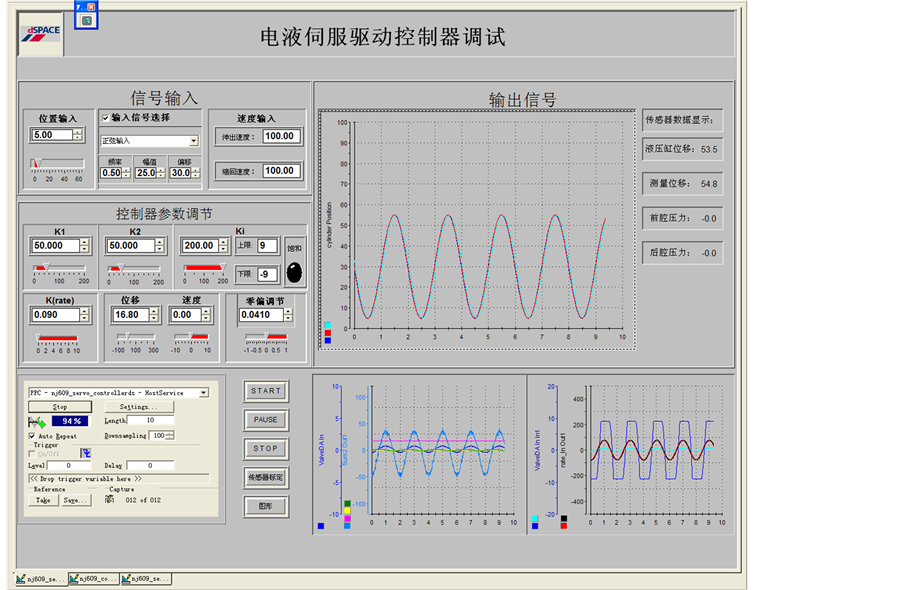
Figure 5. The software debugging interface of ControlDesk
图5. ControlDesk软件调试界面
基于以上的实时环境,逐步调整确定Kp、Ki、Kd等控制参数值,使系统的响应满足我们的需要。图6所示为最终所得到的电液伺服控制系统分别跟踪方波信号、正弦输入及锯齿波输入信号时的响应曲线,其中蓝色曲线表示系统的期望位置输入,红色曲线表示系统的实际位置输出曲线。由图可以看出,该控制系统响应快速,无超调,跟踪性能优越,可以满足系统的实际需要。
6. 结论
本文介绍了基于dSPACE的半实物仿真技术,采用dSPACE标准组件系统DS1005处理器作为控制器,建立了电液伺服控制系统半实物仿真平台,并利用ControlDesk进行了在线参数调试。试验结果表明,使用该平台在短时间内即可完成对所设计的伺服控制算法进行反复更改和试验,不仅节省了时间,费用

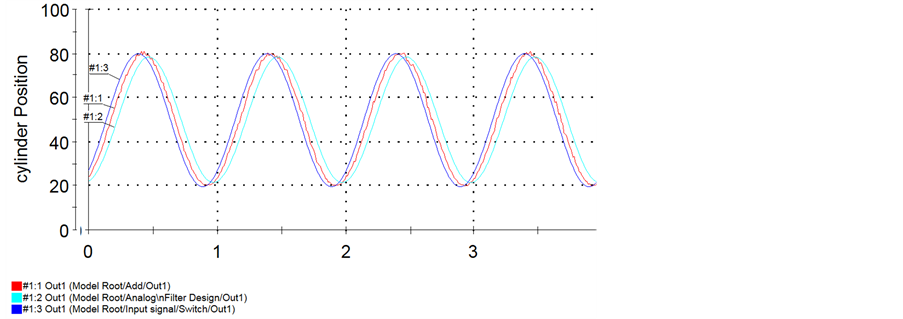
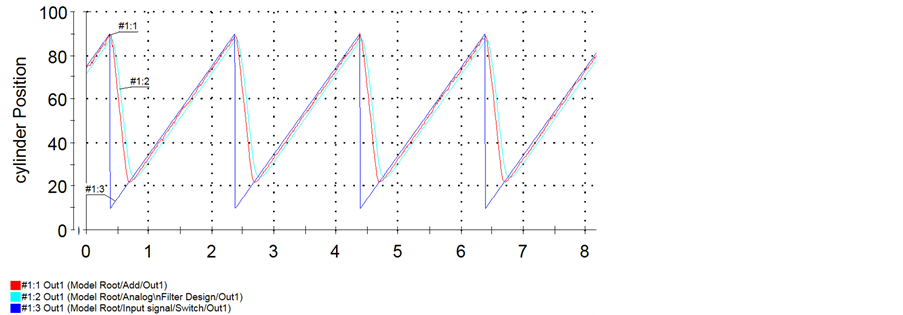
Figure 6. The response tracking curve under different input signal
图6. 不同输入信号下系统的响应跟踪曲线
也大大降低。同时使用此方法获得的试验结果较传统的离线仿真结果更能体现实际系统的动态性能,试验参数可直接应用于实际中。
参考文献 (References)
- [1] 马培蓓, 吴进华, 纪军, 等 (2004) dSPACE实时仿真平台软件环境及应用. 系统仿真学报, 4, 667-670.
- [2] 恒润科技 (2001) dSPACE基于Windows平台的实时快速原型及半实物仿真的一体化解决途径. 恒润科技公司, 北京.
- [3] dSPACE (2001) Real-time interface (RTI and RTI-MP) implementation guide, release 3.3. dSPACE CmbH, Paderborn.
- [4] Low, K.H., Wang, H. and Wang, Y.M. (2005) On the development of a real time control system by using xPC-target: Solution to robotic system control. IEEE Proceedings of the International Conference on Automation Science and Engineering, Edmonton, 345-350.
- [5] 杨涤, 李立涛, 杨旭, 朱承元 (2002) 系统实时仿真开发环境与应用. 清华大学出版社, 北京.
- [6] dSPACE (2001) Control desk automation guide, release 3.2 & 3.3. dSPACE GmbH, Paderborn.
- [7] 潘峰, 薛定宇, 徐心和 (2004) 基于dSPACE半实物仿真技术的伺服控制研究与应用. 系统仿真学报, 5, 936-938.
- [8] 邢宗义, 张媛, 侯远龙, 等 (2009) 电液伺服系统的建模方法研究与应用. 系统仿真学报, 3, 1719-1725.