Mechanical Engineering and Technology
Vol.07 No.03(2018), Article ID:25456,8
pages
10.12677/MET.2018.73023
Research on Frame Free Motor Technology for Robot
Xibin Guo, Qing Zhao, Pengfei Li, Guifang Yuan, Yajing Guo
Beijing Research Institute of Precise Electromechanicals and Controls, Beijing

Received: May 21st, 2018; accepted: Jun. 8th, 2018; published: Jun. 15th, 2018

ABSTRACT
Aiming at the characteristics of robot application, a technology research on 100 W level frameless motor for robot field is carried out. Taking the load characteristics as the starting point and taking the performance as the landing point, the design of the motor is optimized from the point of design, material selection, electromagnetic characteristics and thermal characteristics.
Keywords:Frameless, Motor, Robot
机器人用无框电机技术研究
郭喜彬,赵青,李鹏飞,远桂方,郭雅静
北京精密机电控制设备研究所,北京
收稿日期:2018年5月21日;录用日期:2018年6月8日;发布日期:2018年6月15日

摘 要
针对机器人应用特点,对一种面向机器人领域的100 W级无框电机开展技术研究。以负载特性为出发点,以性能为落脚点,从设计要点、材料选取、电磁特性、热特性等角度出发,对电机进行系统优化设计。
关键词 :无框,电机,机器人

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
无框电机是一种新型力矩电机,专为需求体积小、重量轻、惯量低、结构紧凑、功率高的应用场合而设计,适配性强,在机器人关节、医疗机器人、传感器万向节、无人机推进和制导系统以及其他应用领域具有广泛的应用前景 [1] [2] 。
目前无框电机的代表性产品有美国科尔摩根的TBM (S)无框力矩电机、Parker公司的K系列无框伺服电机、Aerotech公司S-series高性能无框力矩电机、Alliedmotion公司的无框力矩电机等。
本研究针对机器人用无框电机,开展方案设计及优化分析。
2. 无框电机设计指标
根据设计要求,研发一款无框永磁同步电动机,电机的主要参数与性能要求如下表1所示。
3. 设计要点
该类电机的设计要点和难点包括下述两方面。
1) 通过优化设计使得所设计电机在限定体积下满足转矩输出要求。主要包括两部分转矩:
在额定电流下能够长时间输出连续转矩(受绕组温升限制);
在峰值电流下能够输出峰值转矩(受电机过载能力和直流电压限制),峰值转矩指标参照科尔摩根产品样本中的相应参数 [3] [4] 。
2) 通过优化设计极槽配合、转子磁极结构、斜槽等手段降低齿槽转矩和转矩脉动,抑制转速扰动,改善运行平稳性。
4. 材料与参数
综合考虑应用环境、使用条件、性能、成本等多种因素,相关参数与材料的选择如下,并按此进行仿真分析:
1) 绝缘等级:耐温180˚C以上
2) 槽满率:约70%;
3) 槽绝缘厚度:0.2 mm~0.2 5mm

Table 1. Design requirements for frame free motor
表1. 无框电机的设计要求
4) 叠压系数:0.97
5) 硅钢片型号:35W270硅钢片,特性如图1所示。
6) 永磁体:N38EH,Br = 1.15T − 1.25T (20˚C),150˚C退磁曲线线性,180˚C拐点不高于0.2。(场计算时,Br取1.2T)
7) 绝缘等级采用H级绝缘。
5. 设计与分析
在负载转矩仿真计算过程中,电机的电流均按照正弦电流波形进行计算,且除表面插入式转子磁极结构外,均采用Id = 0进行仿真 [5] [6] 。
5.1. 电磁分析
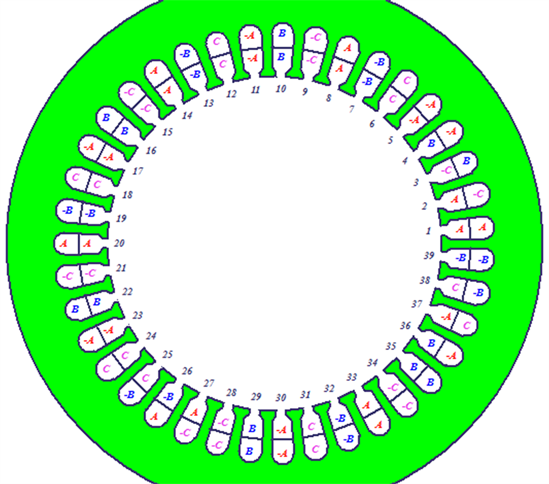
首先分析无框电机应用较多的12极39槽的极槽配合。该极槽配合具有不同的绕组分相方式,分别如如图2(a)、图2(b)所示,这也是两种不同分相方式电机的仿真模型。从仿真计算得到的空载反电动势结果来看,新型分相方式电机的空载反电动势有效值更大,且转矩脉动更小,如图3及表2所示。
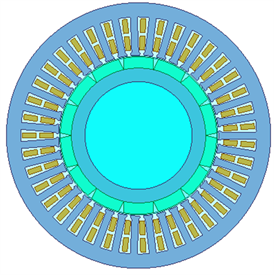
由于极槽配合对无框电机的性能影响很大,因此,在分析12极39槽的基础上,进一步分析14极15槽和14极39槽电机的性能。其模型如图4所示。仿真结果如表3和图5所示,从计算结果可以看出,14极39槽在保证平均转矩的同时,转矩脉动很小,不足14极39槽的一半,因此具有显著的性能优势。
5.2. 定子斜槽
定子斜槽可有效削弱齿槽效应对转矩脉动的影响,但同时也会导致电机的基波反电动势和平均转矩产生较大幅度下降。因此,采用斜槽工艺时,需要采取其他措施提高反电动势和平均电磁转矩。结果如表4所示。

Figure 1. Magnetization curve of 35W270
图1. 35W270磁化曲线
 (a)
(a)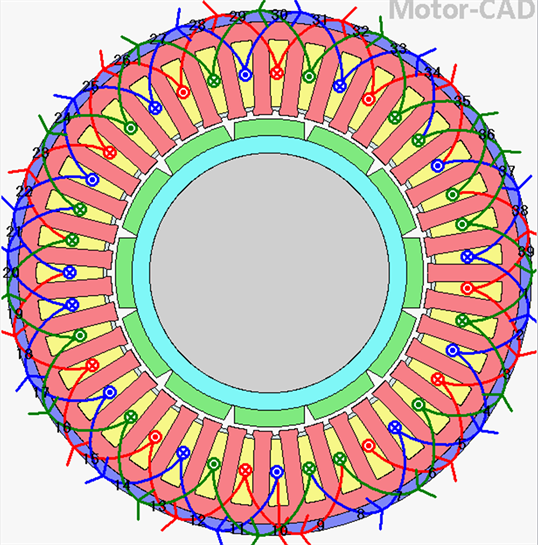 (b)
(b)
Figure 2. Distribution of two different phases of phase winding for 39s12p. (a) Rmxprt automatic split phase; (b) new split phase
图2. 12极39槽两种不同的分相方式绕组分布。(a) Rmxprt自动分相;(b) 新型分相
5.3. 定子开辅助槽
在定子齿顶位置开0.5 mm的小半圆作为辅助槽以削弱转矩脉动。电机结构如图所示。从表中计算结果可知,开设辅助槽可以降低转矩脉动0.25个百分点,同时,电机的平均转矩下降约2%。仿真模型及
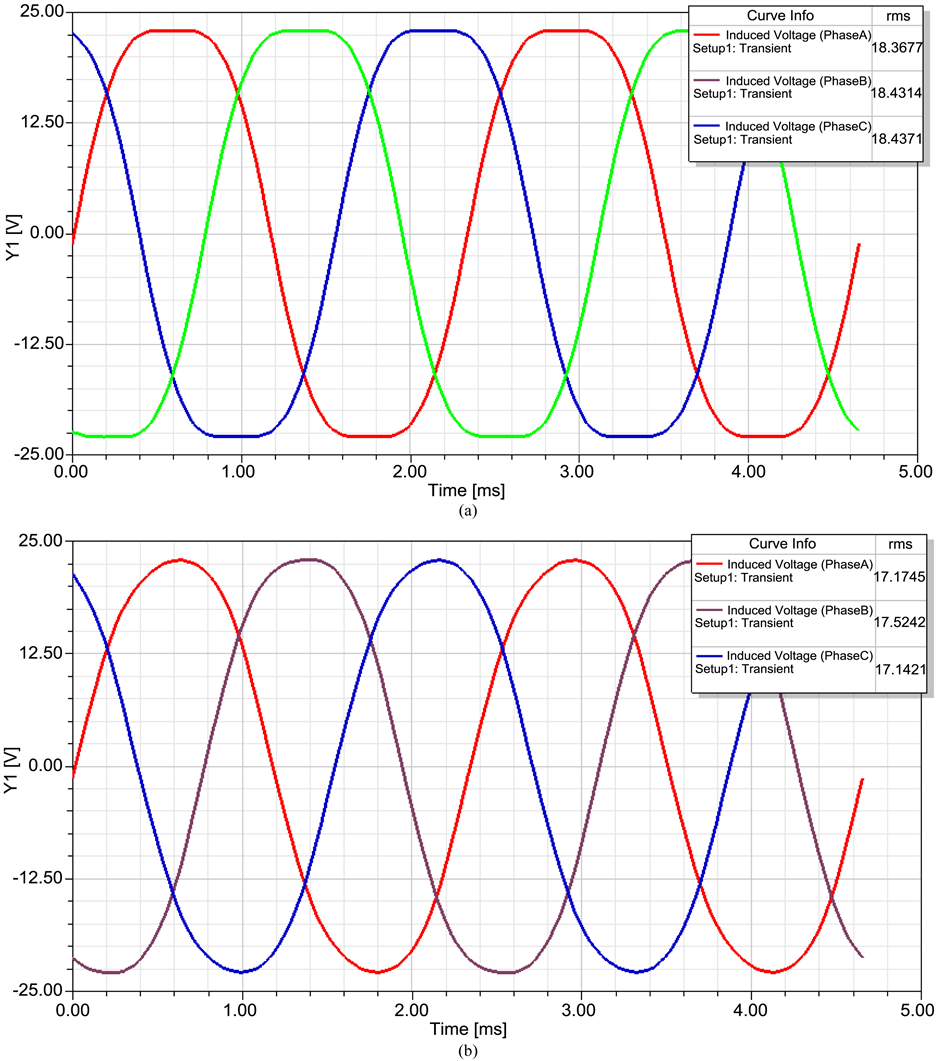
Figure 3. Unloaded back EMF waveforms under different phase separation modes for 39s12p. (a) No-load back EMF of new split phase; (b) no-load back EMF of Rmxprt automatic split phase
图3. 12极39槽不同分相方式下的空载反电动势波形。(a) 新型分相空载反电势;(b) Rmxprt分相空载反电势
5.4. 热分析
对14极39槽方案进行热分析,当环境温度为25˚C,电机绕组最高温度为145.8˚C,满载H级绝缘等级的温度要求。仿真对比结果如图7所示。

 14极15槽 14极39槽
14极15槽 14极39槽
Figure 4. Electric motor model with different pole grooves
图4. 不同极槽配合电机模型

Figure 5. Different polar slots combined with unloaded back EMF waveforms. (a) 15 slot 14 pole; (b) 39 slot 14 pole
图5. 不同极槽配合空载反电动势波形。(a) 14极15槽;(b) 14极39槽
Figure 6. Schematic diagram of the structure of the stator opening auxiliary slot
图6. 定子开辅助槽结构示意图
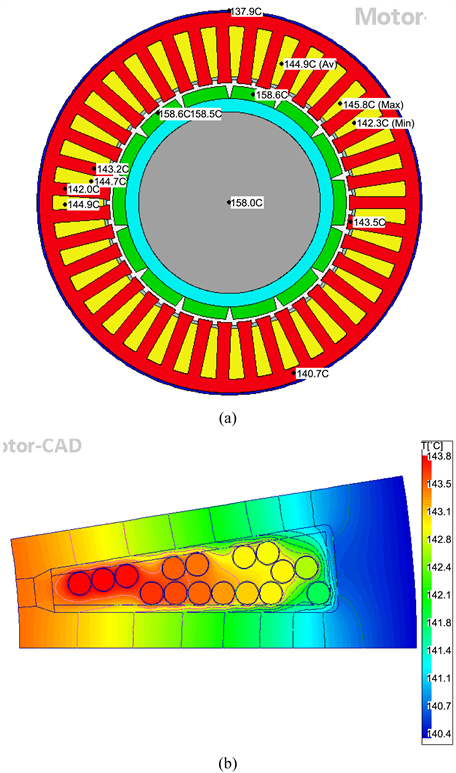
Figure 7. Temperature distribution of motor (ambient temperature 25). (a) The temperature distribution of the radial section of the motor; (b) the temperature distribution of the winding in the motor slot
图7. 14极39槽电机的温度分布(环境温度25˚C)。(a) 电机径向截面温度分布;(b) 电机槽内绕组温度分布
Table 2. Torque ripple in phase separation of different windings of motor
表2. 12极39槽电机不同绕组分相的转矩脉动
Table 3. Comparison of electromagnetic performance of motors with different electrode grooves
表3. 不同极槽配合电机的电磁性能对比
Table 4. Effect of chute on no-load EMI and torque ripple
表4. 斜槽对空载反电动势和转矩脉动的影响
Table 5. Effect of auxiliary slot on no-load EMI and torque
表5. 辅助槽对空载反电动势和转矩的影响
6. 小结
本文提出了一种面向机器人领域的100 W级无框电机的技术研究。以负载特性为出发点,以性能为落脚点,从设计要点、材料选取、电磁特性、热特性等等角度出发,对电机进行系统优化设计。
文章引用
郭喜彬,赵青,李鹏飞,远桂方,郭雅静. 机器人用无框电机技术研究
Research on Frame Free Motor Technology for Robot[J]. 机械工程与技术, 2018, 07(03): 187-194. https://doi.org/10.12677/MET.2018.73023
参考文献
- 1. 许实章. 电机学[M]. 北京: 机械工业出版社, 1981.
- 2. 陈益广, 郑军, 魏娟, 等. 舵机用永磁同步电机的设计与温度场分析[J]. 电工技术学报, 2015, 30(14): 94-99.
- 3. 郭喜彬, 闫海媛, 魏娟, 等. 基于Halbach结构的伺服丝杠电机技术研究[J]. 微特电机, 2017(12): 32-34.
- 4. 陈益广, 潘玉玲, 贺鑫. 永磁同步电机分数槽集中绕组磁动势[J]. 电工技术学报, 2010, 25(10): 30-36.
- 5. 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 1997.
- 6. 许实章. 电机学[M]. 北京: 机械工业出版社, 1981.