Dynamical Systems and Control
Vol.06 No.01(2017), Article ID:19464,12
pages
10.12677/DSC.2017.61003
Attitude Control for a Generic Reentry Vehicle via Command Filtered Back-Stepping Technology
Yuehui Ji1*, Hailiang Zhou2
1Tianjin Key Laboratory for Control Theory & Applications in Complicated Systems and School of Electrical Engineering, Tianjin University of Technology, Tianjin
2Tianjin Institute of Metrological Supervision and Testing (TIMST), Tianjin

Received: Dec. 20th, 2016; accepted: Jan. 2nd, 2017; published: Jan. 5th, 2017
Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
A command filtered back-stepping technology is exploited and analyzed to design a dynamic state- feedback attitude controller for a generic reentry vehicle in the technical notes. In the underlying command filtered back-stepping controller, sliding-mode-based integral filters are introduced to estimate the virtual control terms and their derivatives, obviating the complex analytical computation process, subsequently solving the problem of “explosion of computation” in traditional back-stepping approach. The stability analysis of the closed-loop system and the convergence of the aerodynamic angles are verified based on the input-to-state stability and small-gain theorem. Numerical simulations are included to demonstrate the effectiveness of the proposed control scheme.
Keywords:Reentry Vehicle, Command Filtered Back-Stepping Technology, Attitude Control

基于指令滤波反步法的再入飞行器姿态控制
吉月辉1*,周海亮2
1天津市复杂系统控制理论及应用重点实验室&天津理工大学自动化学院,天津
2天津市计量监督检测科学研究院,天津

收稿日期:2016年12月20日;录用日期:2017年1月2日;发布日期:2017年1月5日

摘 要
针对再入飞行器,提出一类新型的简洁的指令滤波反步法,设计动态的状态反馈姿态控制器。所设计的指令滤波反步控制器中,构建积分滑模滤波器逼近虚拟控制输入及其导数,避免传统反步法中复杂的解析推导过程,解决传统反步法中“计算爆炸”问题。在闭环系统中,采用输入状态稳定性和非线性小增益定理分析并保证闭环系统的稳定性和状态信号的有界性。最后,在仿真中验证了所提出姿态控制方法的有效性。
关键词 :再入飞行器,指令滤波反步法,姿态控制

1. 引言
再入飞行器可再入大气层且降落到指定的地点,经过简单的维修后,便可再次执行运载任务即可重复使用,极大地降低研发成本,提高运载能力,因此再入飞行器的研究受到国内外军事强国的高度重视。飞行器再入过程中,外界环境变化复杂,保证其可重复使用的关键是再入过程的安全稳定飞行,使得飞行器能够到达指定的位置。为了实现再入飞行器的安全稳定飞行,关键问题之一是姿态控制系统的设计。
近年来,已有学者采用非线性控制方法对再入飞行器的姿态跟踪问题展开研究:反馈线性化 [1] [2] [3] ,滑模技术 [4] [5] [6] [7] [8] ,轨迹线性化 [9] [10] ,Theta-D [11] [12] [13] 等。由于在系统化的设计过程简单,同时可完成系统稳定性的证明,基于反步法的姿态控制已取得一定的研究成果 [14] 。然而传统反步法设计的控制器存在“计算爆炸”问题 [15] ,即在每一步的反步法控制器设计过程中,需要对虚拟控制输入求取解析导数,随着系统阶数的增加,控制器设计更加复杂。为此,已存在各种策略解决该问题:动态面技术 [16] ,基于Tikhonov’s theorem的指令滤波反步法 [17] [18] [19] 。
在本文中,针对满足严反馈模型的再入飞行器模型,研究一类新型的指令滤波反步法技术,保证再入飞行器精确的姿态跟踪。在指令滤波反步法控制器中,设计滑模积分滤波器逼近传统反步法中虚拟控制输入及其导数,避免解析推导过程,从理论上有效解决“计算爆炸”问题。和 [17] [18] [19] 中的指令滤波反步法不同之处在于,本文采用输入状态稳定性分析和小增益定理 [20] [21] [22] ,而不是设计一个候选函数保证闭环系统的稳定性。在闭环系统中,闭环系统中包括控制器和滤波器,且均满足输入状态稳定性条件,继而采用非线性小增益定理保证气动角对参考信号的有效跟踪和闭环系统的稳定性。
论文的结构如下,第二部分给出再入飞行器的运动方程,及系统满足的假设条件,第三部分设计指令滤波反步法姿态控制器,并讨论闭环系统的稳定性,第四部分仿真实例说明了所提出控制策略良好的跟踪控制性能。第五部分是结论。
2. 再入飞行器模型描述
通过拉格朗日方程推导再入飞行器X-33的非线性模型 [23] ,再入飞行器的姿态系统表征飞行器的旋转运动,其状态变量包括攻角、侧滑角、倾侧角和滚转角速率、俯仰角速率和偏航角速率。通过机载传感器可直接测量或者通过陀螺仪速率精确合理地估计飞行器的状态变量,因此假设飞行器的状态已知,可直接用于控制系统的分析和设计。假设传感器和执行器都是理想的,不考虑传感器和执行器的动态特性。
再入飞行器的运动动力学方程为:
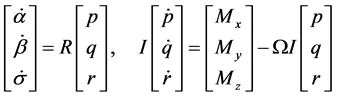 (1)
(1)
其中 分别为攻角、侧滑角和倾侧角,
分别为攻角、侧滑角和倾侧角, 分别是滚转速率、俯仰速率和偏航速率,
分别是滚转速率、俯仰速率和偏航速率, 是控制力矩,
是控制力矩, 表示转动惯量。矩阵
表示转动惯量。矩阵 分别定义为:
分别定义为:
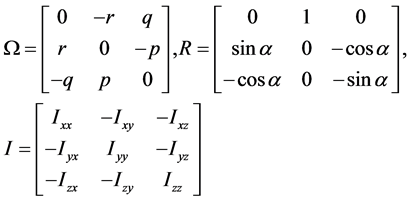 (2)
(2)
将气动角 、欧拉角速率
、欧拉角速率 、控制力矩
、控制力矩 表示为向量形式:
表示为向量形式:
 (3)
(3)
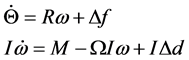
因此,运动动力学方程(1)可整理为:
 (4)
(4)
考虑到通道耦合和扰动力矩的影响,在模型(1)中引入不确定项,再入飞行器的运动方程可表示为严反馈的形式:
 (5)
(5)
其中, 是忽略姿态/轨迹耦合引入的不确定向量,
是忽略姿态/轨迹耦合引入的不确定向量, 表示外部扰动力矩向量。
表示外部扰动力矩向量。
设计再入飞行器姿态控制器的目的是构建控制力拒 ,控制气动角
,控制气动角 从初始条件
从初始条件 跟踪参考信号
跟踪参考信号 ,同时闭环系统所有信号是有界的。
,同时闭环系统所有信号是有界的。
再入飞行器的严反馈模型(5)满足如下假设:
假设1:矩阵 满足
满足 ,即
,即 可逆。
可逆。
假设2:对所有的 ,参考信号
,参考信号 及其一阶导数
及其一阶导数 是连续的、有界的。
是连续的、有界的。
假设3:假设不确定向量 和扰动力矩向量
和扰动力矩向量 是有界的,其上界分别满足
是有界的,其上界分别满足 。
。
3. 指令滤波反步姿态跟踪控制系统
将再入飞行器的运动方程分为气动角和欧拉角速率两个子系统,通过虚拟控制输入控制气动角子系统,真实输入力矩控制欧拉角速率子系统。研究一类新型的指令滤波反步法,保证气动角对参考信号的稳定性跟踪,同时采用滑模积分滤波器逼近虚拟控制输入及其导数项,避免传统反步法中虚拟控制输入的解析求导过程,有效解决“计算爆炸”问题。闭环系统中包括互联的控制器和滤波器,两者均满足输入状态稳定性条件。即,控制器的状态跟踪误差相对于滤波误差满足输入状态稳定,同时滤波器的滤波误差相对于状态跟踪误差满足输入状态稳定,继而可采用非线性小增益定理保证闭环系统的稳定性。
3.1. 指令滤波反步法控制器设计
首先采用坐标变换: ,其中
,其中 是气动角子系统的稳定虚拟控制律。在气动角子系统中,设计反馈控制
是气动角子系统的稳定虚拟控制律。在气动角子系统中,设计反馈控制 ,并设计滑模积分滤波器逼近其导数项,进一步设计稳定虚拟控制律
,并设计滑模积分滤波器逼近其导数项,进一步设计稳定虚拟控制律 ;在欧拉角速率子系统中,类似地设计真正的控制律
;在欧拉角速率子系统中,类似地设计真正的控制律 。
。
第一步:
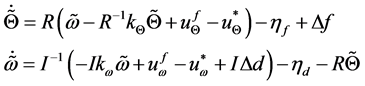
气动角子系统中,跟踪误差动态满足:
 (6)
(6)
定义光滑的反馈控制 为:
为:
 (7)
(7)
其中 抵消不确定向量
抵消不确定向量 的影响。
的影响。
将(7)式代入(6)式中,有:
 (8)
(8)
定义稳定虚拟控制:
 (9)
(9)
其中, 为正定矩阵,
为正定矩阵, 用于逼近
用于逼近 。
。
因此, 满足:
满足:
 (10)
(10)
第二步:
在欧拉角速率子系统中, 满足:
满足:
 (11)
(11)
设计光滑的反馈控制为:
 (12)
(12)
因此,有:
 (13)
(13)
其中, 抵消扰动力矩向量
抵消扰动力矩向量 的影响。
的影响。
定义控制力矩为:
 (14)
(14)
其中 为正定矩阵,
为正定矩阵, 用于逼近
用于逼近 。
。
此时,欧拉角速率跟踪误差 满足:
满足:
 (15)
(15)
气动角和欧拉角速率跟踪误差可表示为:
 (16)
(16)
定理1证明状态跟踪误差子系统相对于滤波误差子系统 是输入状态稳定的。
是输入状态稳定的。
定理1:在状态跟踪误差子系统中,状态向量为 ,输入向量为
,输入向量为 ,该子系统是输入状态稳定的。
,该子系统是输入状态稳定的。
证明:选择Lyapunov候选函数为 ,沿着轨迹(16)的导数为:
,沿着轨迹(16)的导数为:
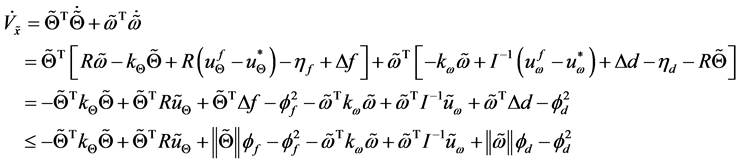 (17)
(17)
由完全平方式,有:
 (18)
(18)
因此, 的导数满足:
的导数满足:
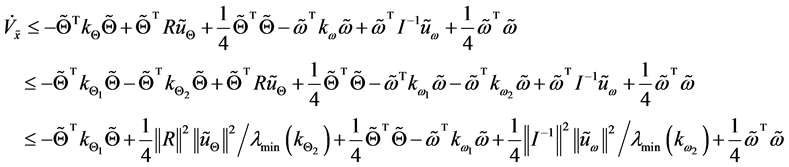 (18)
(18)
其中, 且
且 是正定矩阵。
是正定矩阵。
由完全平方式,有:
 (19)
(19)
定义 为:
为:

则,有:
 (20)
(20)
即,若下式成立:
 (21)
(21)
则有 。
。
其中,
 (22)
(22)
且下式成立:
 (23)
(23)
因此,状态跟踪误差子系统是输入状态稳定的,且增益函数为:
 (24)
(24)
3.2. 滑模积分滤波器设计
在气动角和欧拉角速率子系统中,采用基于Lyapunov的滤波器逼近反馈控制 及其导数,避免解析推导过程。同时滤波误差子系统相对于状态跟踪误差
及其导数,避免解析推导过程。同时滤波误差子系统相对于状态跟踪误差 满足输入状态稳定性。设计一类改进的滑模积分滤波器:
满足输入状态稳定性。设计一类改进的滑模积分滤波器:
 (25)
(25)
其中, 是正定矩阵,滤波器的初始条件满足
是正定矩阵,滤波器的初始条件满足 。定义
。定义 ,则系统(25)可整理为:
,则系统(25)可整理为:
 (26)
(26)
其中 。
。
则滤波误差 动态满足:
动态满足:
 (27)
(27)
定理2.滤波误差子系统由状态变量 和输入变量
和输入变量 组成,是输入状态稳定的。
组成,是输入状态稳定的。
证明:对于 子系统,定义Lyapunov候选函数为:
子系统,定义Lyapunov候选函数为:
 (28)
(28)
其沿着轨迹(28)的导数满足:
 (29)
(29)
若 ,则有:
,则有:
 (30)
(30)
由完全平方式,可知:
 (31)
(31)
则对所有 ,
, 的导数满足:
的导数满足:
 (32)
(32)
因此,滤波误差子系统相对于输入 是输入状态稳定的,且增益函数为:
是输入状态稳定的,且增益函数为:
 (33)
(33)
3.3. 闭环系统的稳定性分析
闭环系统由控制器和滤波器组成,且两者满足输入状态稳定性,继而采用小增益定理保证闭环系统的稳定性。
定理3:在假设1~3成立的前提下,针对再入飞行器X-33模型,指令反步法控制器和滑模积分滤波器所构成的闭环系统,对于有界的初始条件,只要控制器增益足够大,可保证系统输出跟踪误差收敛到零点附近较小的邻域内,且闭环系统的所有信号保持有界。
证明:定理1和定理2分别讨论了状态跟踪误差子系统和滤波误差子系统的输入状态稳定性,即存在类 函数
函数 和
和 以及类
以及类 函数
函数 和
和 ,使下式成立:
,使下式成立:
 (34)
(34)
根据小增益定理,若下式成立:
 (35)
(35)
即 ,
, 。
。
则对初始条件 和
和 ,有:
,有:
 (36)
(36)
即闭环系统是局部输入状态稳定的。由 的有界性,可保证
的有界性,可保证 和控制信号M的有界性。至此,闭环系统所有信号保持有界。
和控制信号M的有界性。至此,闭环系统所有信号保持有界。
特别的,响应 满足:
满足:
 (37)
(37)
若选择足够大的控制增益 和滤波器参数
和滤波器参数 ,
, 将收敛到零点附近小邻域内。
将收敛到零点附近小邻域内。
注:与传统反步法控制相比,本发明的指令滤波反步法控制可提供准确的姿态跟踪性能和控制性能,同时避免虚拟控制的解析求导过程,降低控制系统计算负担,缩短仿真时间。本发明设计的指令滤波反步法控制应用于再入飞行器,可保证再入飞行器中姿态对参考信号的快速精确跟踪性能。
4. 仿真实例
以再入飞行器X-33的非线性模型为对象,在MATLAB/Simulink平台中验证指令滤波反步法姿态控制系统的控制效果和跟踪性能。
再入飞行器非线性运动方程中,转动惯量取值为:
扰动力矩向量 取值为:
取值为:
再入飞行器的初始条件为:

其中,向量 表示地心距、经度、纬度、飞行速度、航向角、航迹角的初始值,
表示地心距、经度、纬度、飞行速度、航向角、航迹角的初始值, 是气动角和欧拉角速率的初始状态。再入段飞行过程中,攻角和倾侧角的参考信号由基于Legendre伪谱法的导航系统提供 [24] ,而侧滑角的参考信号设为零。
是气动角和欧拉角速率的初始状态。再入段飞行过程中,攻角和倾侧角的参考信号由基于Legendre伪谱法的导航系统提供 [24] ,而侧滑角的参考信号设为零。
增加指令滤波反步姿态控制器的增益虽然可加快跟踪速度,但将降低系统的暂态性能,因此通过试凑获取合适的控制器增益。滤波器增益 也通过试凑调试获取,滤波器其他参数
也通过试凑调试获取,滤波器其他参数 对系统性能影响相对有限,取值略大于零。最后控制器和滤波器增益取值为
对系统性能影响相对有限,取值略大于零。最后控制器和滤波器增益取值为

下文中给出指令滤波反步姿态控制和传统反步控制的仿真结果,以便比较两者的控制效果和跟踪性能。其中,图1为攻角参考信号和跟踪轨迹图,图2为攻角跟踪误差图,图3为侧滑角跟踪轨迹,图4为倾侧角参考信号和跟踪轨迹图,图5倾侧角跟踪误差图。图6~图8分别为滚转角速率、俯仰角速率和偏航角速率的跟踪轨迹图。由于侧滑角的参考信号设为零,侧滑角的跟踪误差等于侧滑角轨迹,因此没有给出侧滑角的跟踪误差图。仿真图表明,所提出的指令滤波反步姿态控制在较短时间内实现对参考信号的稳定跟踪,同时系统状态收敛于稳态值。尤其是,在整个机动过程中,图1~图5中气动角可快速收敛于参考信号,跟踪误差收敛至零。
与传统反步法相比,指令滤波反步姿态控制提供精确的跟踪性能。当仿真配置参数Slover设为ode45时,指令滤波反步姿态控制仿真时间大约是59 s,而传统反步控制需要482 s。仿真结果表明,所提出的
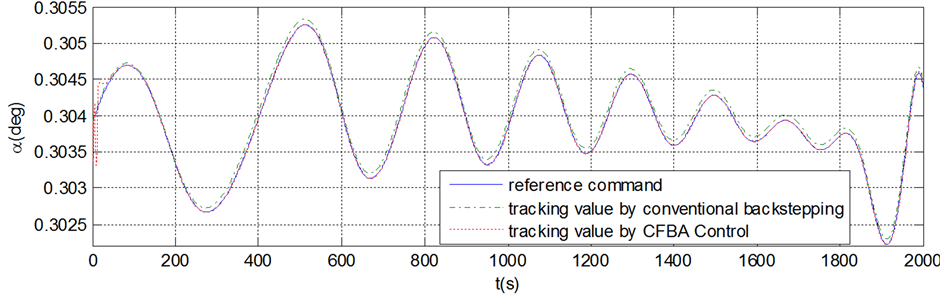
Figure 1. The reference signal and tracking trajectory for angle of attack
图1. 攻角参考信号和跟踪轨迹图
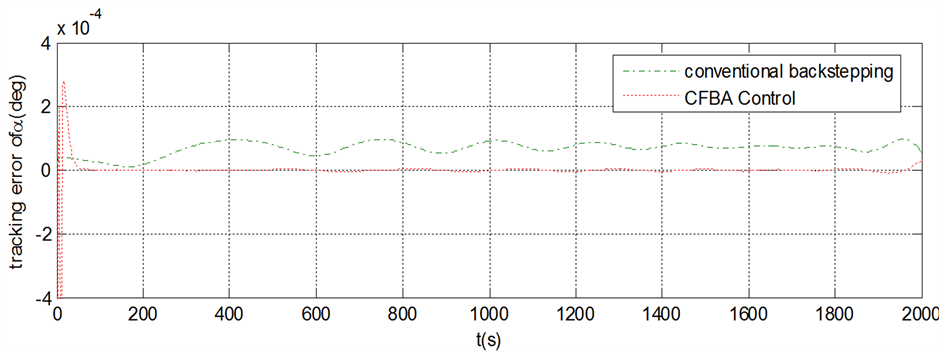
Figure 2. The tracking errors for angle of attack
图2. 攻角跟踪误差图
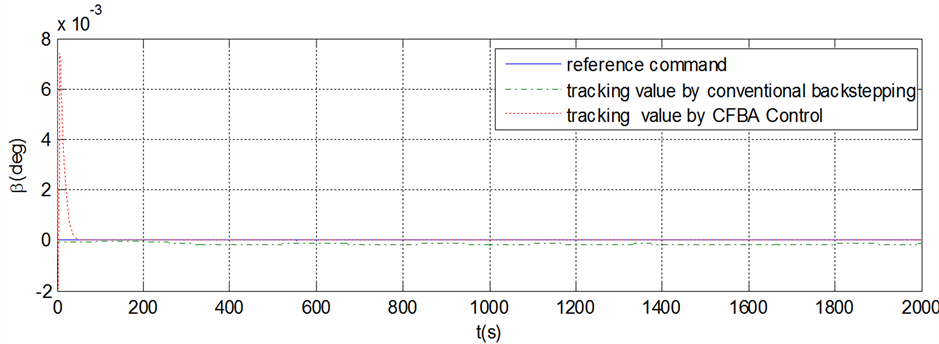
Figure 3. Tracking trajectory for sideslip angle
图3. 侧滑角跟踪轨迹

Figure 4. Reference signal and tracking trajectory for bank angle
图4. 倾侧角参考信号和跟踪轨迹图
控制方法可保证再入飞行器良好的气动角跟踪性能,同时避免传统反步方法中虚拟控制输入复杂的解析推导过程,缩短仿真时间,减轻控制系统的计算负担。
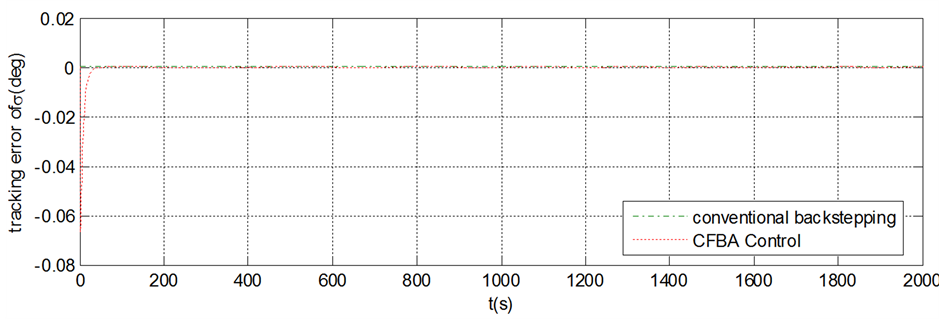
Figure 5. The tracking errors for bank angle
图5. 倾侧角跟踪误差轨迹图
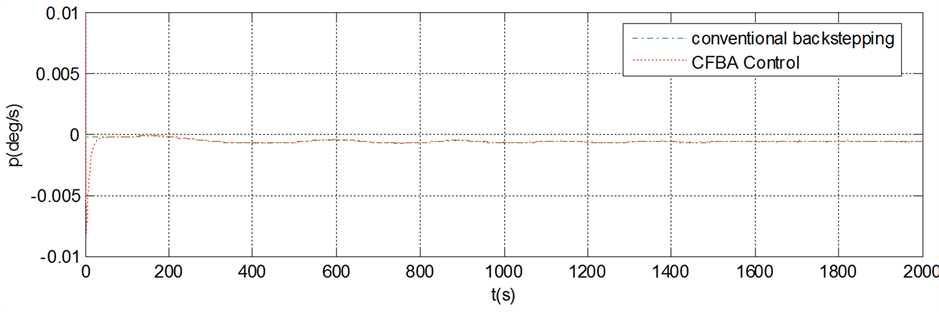
Figure 6. Tracking trajectory for roll rate
图6. 滚转角速率跟踪轨迹图
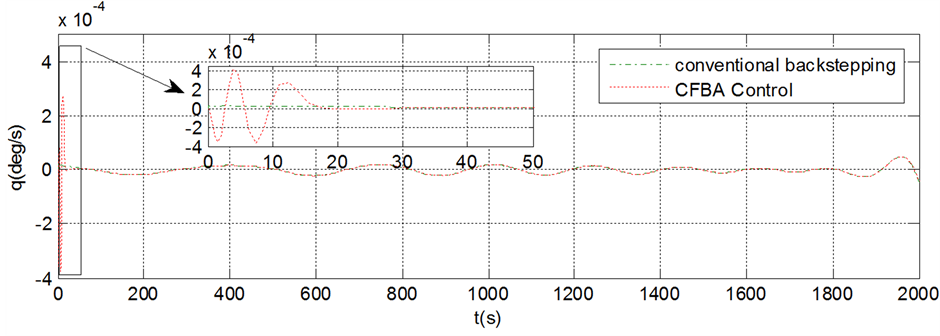
Figure 7. Tracking trajectory for pitch rate
图7. 俯仰角速率跟踪轨迹图
5. 结论
论文针对再入飞行器的非线性模型,设计一类指令滤波反步法姿态控制系统。综合输入状态稳定性,所提出的指令滤波反步法控制器有效解决传统反步法中“计算爆炸”问题。继而,采用非线性小增益
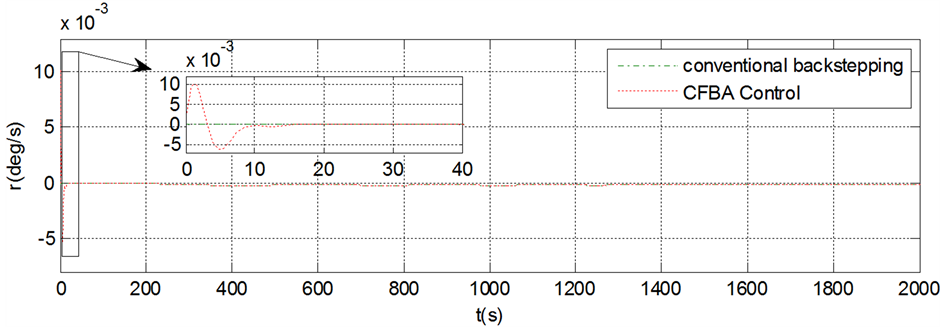
Figure 8. Tracking trajectory for yaw rate
图8. 偏航角速率跟踪轨迹图
定理保证闭环系统中所有信号是有界的。在仿真中验证了所提出的姿态控制器为再入飞行器的机动飞行提供良好的跟踪效果。
基金项目
国家自然科学基金青年项目支持(Grant No. 61603274, Grant No. 61403279)。
文章引用
吉月辉,周海亮. 基于指令滤波反步法的再入飞行器姿态控制
Attitude Control for a Generic Reentry Vehicle via Command Filtered Back-Stepping Technology[J]. 动力系统与控制, 2017, 06(01): 16-27. http://dx.doi.org/10.12677/DSC.2017.61003
参考文献 (References)
- 1. Johnson, E.N. (2000) Limited Authority Adaptive Flight Control. Georgia Institute of Technology, Atlanta.
- 2. Johnson, E.N., Calise, A.J., EI-Shirbiny, H.A., et al. (2000) Feedback Linearization with Neural Network Augmentation Applied to X-33 Attitude Control. AIAA Guidance, Navigation and Control Conference, Denver, CO, August 2000, 1-13.
- 3. Johnson, E.N. and Calise, A.J. (2003) Limited Authority Adaptive Flight Control for Reusable Launch Vehicles. Journal of Guidance, Control, and Dynamics, 26, 906-913. https://doi.org/10.2514/2.6934
- 4. Shtessel, Y. and Krupp, D. (1997) Reusable Launch Vehicle Trajectory Control in Sliding Modes. American Control Conference, New Mexico, 6-6 June 1997, 2557-2561. https://doi.org/10.1109/acc.1997.609256
- 5. Shtessel, Y., McDuffie, J. and Jackson, M. (1998) Sliding Mode Control of the X-33 Vehicle in Launch and Re-Entry Modes. AIAA Guidance, Navigation, and Control Conference, Reston, VA, 1998, 1-10. https://doi.org/10.2514/6.1998-4414
- 6. Shtessel, Y., Hall, C. and Jackson, M. (2000) Reusable Launch Vehicle Control in Multi-ple-Time-Scale Sliding Modes. Journal of Guidance, Control, and Dynamics, 23, 1013-1020. https://doi.org/10.2514/2.4669
- 7. Shtessel, Y., Hall, C. and Jackson, M. (2001) Multiple Time Scale Sliding Mode Control of Reusable Launch Vehicles in Ascent and Descent Modes. American Control Conference, Arlington, VA, 25-27 June 2001, 4357-4362. https://doi.org/10.1109/acc.2001.945663
- 8. Shtessel, Y., Zhu, J.J. and Daniels, D. (2002) Reusable Launch Vehicle Attitude Control Using a Time-Varying Sliding Mode Control Technique. Journal of the Franklin Institute, 349, 81-85. https://doi.org/10.1109/ssst.2002.1027010
- 9. Zhu, J.J., Banker, B.D. and Hall, C.E. (2000) X-33 Ascent Flight Controller Design by Trajectory Linearization: A Singular Perturbational Approach. Proceeding of AIAA Guidance, Navigation and Control Conference, Denver, CO, USA, August 2000, 14-17.
- 10. Zhu, J.J., Hodel, A.S. and Funston, K. (2001) X-33 Entry Flight Controller Design by Trajectory Linearization: A Singular Perturbational Approach. American Astronautical Society Guidance and Control Conference, Breckenridge, Colo, USA, February 2001, AIAA 2000-4159.
- 11. Drake, D., Xin, M. and Balakrishnan, S.N. (2004) Theta-D Control Technique for Ascent Phase of Reusable Launch Vehicles. AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, 16-19 August 2004, 16-19. https://doi.org/10.2514/6.2004-5018
- 12. Tournes, C. and Johnson, C.D. (2001) Reusable Launch Vehicle Control Using Line-ar-Adaptive and Subspace-Stabi- lization Techniques. Journal of Guidance, Control, and Dynamics, 24, 278-286. https://doi.org/10.2514/2.4710
- 13. Das, K., Purlupady, C., Padhi, R. and Brinda, V. (2008) Optimal Nonlinear Control and Estimation for a Reusable Launch Vehicle during Reentry Phase. 16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, 25-27 June 2008, 47-52. https://doi.org/10.1109/med.2008.4602027
- 14. Lian, B.H., Bang, H. and Hurtado, J.E. (2004) Adaptive Backstepping Control Based Autopilot Design for Reentry Vehicle. AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, 16-19 August 2004, 16-19. https://doi.org/10.2514/6.2004-5328
- 15. Swaroop, D., Hedrick, J.K., Yip, P.P. and Gerdes, J.C. (2000) Dynamic Surface Control for a Class of Nonlinear Systems. IEEE Transactions on Automatic Control, 45, 1893-1899. https://doi.org/10.1109/TAC.2000.880994
- 16. Yip, P.P. and Hedrick, J.K. (1998) Adaptive Dynamic Surface Control: A Simplified Algorithm for Adaptive Back- Stepping Control of Nonlinear Systems. International Journal of Control, 71, 959-979. https://doi.org/10.1080/002071798221650
- 17. Farrell, J.A., Polycarpou, M., Sharma, M. and Dong, W. (2008) Command Filtered Back-Stepping. American Control Conference, Seattle, 11-13 June 2008, 1923-1928.
- 18. Farrell, J.A., Polycarpou, M., Sharma, M. and Dong, W. (2009) Command Filtered Back-Stepping. IEEE Transactions on Automatic Control, 54, 1391-1395. https://doi.org/10.1109/TAC.2009.2015562
- 19. Dong, W., Farrell, J.A., Polycarpou, M. and Sharma, M. (2010) Command Filtered Adaptive Back-Stepping. American Control Conference, Baltimore, 30 June-2 July 2010, 105-110.
- 20. Sontag, E.D. (1989) Smooth Stabilization Implies Coprime Factorization. IEEE Transactions on Automatic Control, 34, 435-443. https://doi.org/10.1109/9.28018
- 21. Sontag, E.D. and Wang, Y. (1996) New Characterizations of Input-to-State Stability. IEEE Transactions on Automatic Control, 41, 1283-1294. https://doi.org/10.1109/9.536498
- 22. Jiang, Z.P., Teel, A.R. and Praly, L. (1994) Small-Gain Theorem for ISS Systems and Applications. Mathematics of Control, Signals, and Systems, 7, 95-120. https://doi.org/10.1007/BF01211469
- 23. Recasens, J.J., Chu, Q.P. and Mulder, J.A. (2005) Robust Model Predictive Control of a Feedback Linearized System for a Lifting-Body Re-Entry Vehicle. AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, 15-18 August 2005, 15-18. https://doi.org/10.2514/6.2005-6147
- 24. Tian, B. and Zong, Q. (2011) Optimal Guidance for Reentry Vehicles Based on Indirect Legendre Pseudo-Spectral Method. Acta Astronautica, 67, 1176-1184. https://doi.org/10.1016/j.actaastro.2010.10.010