Dynamical Systems and Control
Vol.
13
No.
02
(
2024
), Article ID:
84670
,
13
pages
10.12677/dsc.2024.132007
合作竞争网络下的多智能体系统比例一致性
李琳玉,唐朝君
重庆理工大学理学院,重庆
收稿日期:2024年3月18日;录用日期:2024年4月8日;发布日期:2024年4月17日

摘要
针对合作竞争网络下的多智能体系统,本文研究了其在无向和有向拓扑下的比例一致性问题。假设系统中的智能体具有一般线性动态,提出了比例一致性协议。首先,应用代数图论和矩阵理论的相关知识,将比例一致性问题转化为一组低维系统的稳定性问题;然后,利用Lyapunov稳定理论得到了该低维系统稳定的条件,并给出了系统达到比例一致性的充分条件;最后,通过数值仿真验证了理论结果的正确性和有效性。
关键词
多智能体系统,合作竞争网络,比例一致性

Scaled Consensus of Multi-Agent Systems in the Cooperative-Competitive Networks
Linyu Li, Zhaojun Tang
College of Sciences, Chongqing University of Technology, Chongqing
Received: Mar. 18th, 2024; accepted: Apr. 8th, 2024; published: Apr. 17th, 2024

ABSTRACT
The scaled consensus of multi-agent systems in undirected and directed topologies is studied for cooperative-competitive networks in this paper. Assuming that the agents have general linear dynamics in multi-agent systems, the scaled consensus protocol is proposed. Firstly, by applying the knowledge of the algebraic graph theory and the matrix theory, the problem of the scaled consensus is cast into the stability of a set of low-dimensional systems. Then, using the stability theory of Lyapunov, the stability condition of the low-dimensional systems is obtained by using Lyapunov stability theory, and sufficient conditions for the system to reach the scaled consensus are given. Finally, the correctness and effectiveness of the theoretical results are verified by the numerical simulation.
Keywords:Multi-Agent Systems, Cooperative-Competitive Networks, Scaled Consensus

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
多智能体系统的一致性问题是协调控制的核心和基础问题,近年来,吸引了学者们的广泛关注。一致性问题的主要任务是设计一致性算法,通过有向或无向的信息交换,在无限或有限的时间内使所有智能体达到相同的值 [1] [2] [3] 。
目前,多智能体系统协同控制的研究成果大多集中在完全合作网络下,然而,在现实生活中,合作与竞争往往是同时存在的 [4] [5] [6] 。例如,文献 [5] 研究了由领导者引导的群体聚集行为,发现当每个子群分别针对一个意向目标时,子群之间和智能体之间会同时存在合作与竞争关系。文献 [6] 发现,在生物系统中,当生存资源有限时,物种之间和物种内部之间也会同时存在合作和竞争关系。此外,合作竞争网络还可以广泛应用于多个领域 [7] [8] [9] 。文献 [7] 在合作竞争网络的基础上,利用收敛状态偏差来检测链路故障。文献 [8] 讨论了具有异质不确定性的多智能体系统在结构平衡和非平衡情况下的协同行为,并提出了实现相应协同行为的充分条件。文献 [9] 针对具有无环划分和结构平衡的拓扑图,提出了一种分布式控制协议,来解决群二分一致性问题。除了文献 [7] 同比例一致性相结合以外,文献 [8] 和 [9] 都是与二分一致性相关的,因此仍有待进一步探索新的领域。
多智能体系统比例一致性问题涉及的领域范围比较广 [10] [11] [12] ,例如群体行为研究、社会网络分析、机器人和无人系统等。文献 [13] 对比例一致性进行了定义。文献 [10] 研究了无向和有向拓扑下有限时间内的比例一致性问题,并确定了最终收敛状态对初始状态条件的依赖性,表明可以通过设计合适的参数来实现比例一致性。文献 [11] 提出了比例一致性协议,并在此基础上得到了在连续时间下智能体的最终收敛状态。文献 [12] 提出了一种新的分布式协议,其中包括局部符号误差的混合常数与时变反馈矩阵,在结构平衡的有向图和结构不平衡但具有正根子图的符号有向图下,证明了在规定时间内协议对具有生成树的多智能体系统的有效性。值得注意的是,通过研究发现,可以通过一些手段将多智能体系统的比例一致性问题转化为一致性问题处理。文献 [14] 的处理方式是通过调整控制协议中的每个智能体子群的参数比例,将比例一致性问题巧妙地转化为一致性问题。而文献 [15] 则通过构建误差函数的方式处理比例一致性问题。此外,在物理世界中也发现了许多类似的例子,例如,航天器协调移位控制系统 [16] 和配水系统 [13] 。因此,如何将多智能体系统的比例一致性问题转化为一致性问题也是本文需要突破的难点。
虽然合作竞争网络和比例一致性问题都有学者进行研究,但在合作竞争网络下的比例一致性问题的文献研究相对较少。文献 [17] 在具有周期性间歇通信和有向拓扑下,通过调整控制协议的参数来实现多智能体系统的一致性。受到这一事实启发,本文采用类似于文献 [17] 的动力学模型,研究基于无向和有向拓扑的合作竞争网络下的多智能体系统比例一致性问题。通过构建一致性误差函数,将比例一致性问题转化为一组低维系统的稳定性问题,并建立Lyapunov函数进行稳定性分析,得到系统实现比例一致性的充分条件。
本文的结构安排如下:第2节给出了预备知识和问题描述;第3节分别给出了在无向和有向拓扑的合作竞争网络下的比例一致性分析;第4节通过数值仿真验证了理论结果的正确性;第5节总结了本文所研究的内容和得出的主要结论。
2. 预备知识和问题描述
2.1. 预备知识
用加权符号图 表示N个智能体所构成的通信拓扑, 和 分别表示节点集和边集。 是G的邻接矩阵,其中 。对于图G,不考虑自环的情况,即 。如果网络中的任一条边 满足 ,则称图G是无向图。如果存在一条边 满足 ,则称图G是有向图。在无向图G中,如果任何两个节点都存在一条路径,则称图G是连通的。在有向图G中,如果任何两个节点都存在一条有向路径,则称图G是强连通的。在有向图G中,如果有且只有一个节点到其他所有节点都存在一条有向路径,则称图G包含一棵有向生成树;如果图G的权值都是非负的,则称图G是正权值图。 表示图G的拉普拉斯矩阵,其中:
在图G中,正权重表示两个智能体是合作关系,负权重表示两个智能体是竞争关系。如果图G存在互不相交的节点集
,使得:1)
,
;2) 当
时, ;当
;当 时,
。则称图G是结构平衡的,否则是结构不平衡的。
时,
。则称图G是结构平衡的,否则是结构不平衡的。
在本文中,设 分别是实数和自然数的集合,而 表示 阶实矩阵的集合; 表示单位矩阵; 表示所有元素为1的列向量; 表示对角元素依次为 的 阶对角矩阵; 表示方阵A的矩阵指数;对于任意给定具有实特征值的方阵A, 表示它的最小特征值;矩阵 表示矩阵A是正定的; 表示Kronecker积。
2.2. 问题描述
考虑由N个智能体构成的系统,假设图G是结构平衡的,不妨设 , ,则邻接矩阵 可写成如下的分块矩阵:
其中, , , , ,且 和 是非负矩阵,而 和 是非负矩阵。
设第i个智能体的动力学模型为:
(1)
其中, 表示第i个智能体的状态, 表示第i个智能体的控制输入,研究以下的比例一致性协议:
(2)
其中, 是耦合强度, 是反馈增益矩阵,且 。
定义1 如果多智能体系统(1)在任意给定的初始条件下满足以下条件:
,如果 属于相同的节点子集;
,如果 属于不同的节点子集,
则多智能体系统(1)达成了比例一致性。
于是系统(1)可以表示成以下向量形式:
(3)
其中, 。
引理1 [12] 若有向图G是结构平衡的,则存在矩阵D,使得 是非负矩阵,其中 。
定义 为第i个智能体 的转换状态,则:
(4)
其中, 。
令 ,则有:
(5)
引理2 若正权值图G包含一棵有向生成树,则0是L的简单特征值,其他特征值的实部都大于0;若正权值图G是连通的,则0是L的简单特征值,其他特征值都大于0。
引理3 [17] 若 是可控的,其中 ,则任意 ,存在一个正定矩阵 ,使得:
(6)
引理4 [11] 若正权值无向图G是连通的,则0是M的简单特征值,其他特征值全大于0。
引理5 若正权值有向图G包含一棵有向生成树,则0是M的简单特征值,其他特征值的实部全大于0。
证明 注意到 ,故 与M有相同的特征值。
首先考虑 ,由引理2和盖尔圆盘定理知:
然后考虑 ,由盖尔圆盘定理,方阵 的特征值处于以下圆盘之中。
因此, 除0以外的特征值的实部都大于0。
下证0是M的简单特征值。
由于图G包含一棵有向生成树,则 。
而 是可逆的,则 。
综上,0是M的简单特征值,其他特征值的实部全大于0。
3. 主要成果
3.1. 无向拓扑的合作竞争网络下的比例一致性分析
本小节讨论无向网络下的比例一致性问题。
定理1 假设符号无向图G是连通的,则利用控制协议(2),多智能体系统(1)实现比例一致性当且仅当以下 个系统:
(7)
是渐近稳定的,其中 , 是矩阵M的非零特征值。
证明 定义一致性误差函数为:
(8)
其中, 。
首先证明系统(1)达到比例一致性当且仅当 。
由于图G是连通的,则 ,故存在
,使得
当且仅当
,即:
,故存在
,使得
当且仅当
,即:
(9)
由 的定义, 等价于定义1的条件被满足。
因此,系统(1)达到比例一致性当且仅当 。
下证 趋于0当且仅当 个系统(7)渐近稳定。
由式(5)可得:
(10)
由引理4,存在可逆矩阵P, ,使得 ,其中J是M的约当标准形, 中对角线元素为M的非零特征值。
令 ,则:
(11)
记 , ,由于:
(12)
则:
(13)
根据式(11)和(13),可得:
(14)
注意到系统(14)渐近稳定当且仅当 是Schur稳定的,其中 。
由于 是分块对角阵或分块上三角阵,则 是Schur稳定的当且仅当 是Schur稳定的,其中 , 。
因此,系统(14)是渐近稳定的当且仅当 是Schur稳定的。即系统(14)是渐近稳定的当且仅当以下系统:
(15)
是渐近稳定的。
由于 趋于0当且仅当 趋于0,则 趋于0当且仅当系统(15)渐近稳定,即 趋于0当且仅当系统(7)渐近稳定。
综上,多智能体系统(1)实现比例一致性当且仅当以下 个系统:
(16)
是渐近稳定,其中 。
定理2 假设 是可控的,且符号无向图G是连通的。如果取 和 ,其中Q是引理3中的矩阵, 是矩阵M的非零特征值,那么对于任意初始状态,多智能体系统(1)实现比例一致性。
证明 构建以下Lyapunov函数:
(17)
沿着式(16)对 进行求导,可得:
(18)
由于 ,式(18)可转化为:
(19)
再根据 ,则式(19)可得:
(20)
根据引理3,可得:
(21)
则式(20),可得:
(22)
所以可得系统(16)渐近稳定。再根据定理1,可以得到系统(1)实现比例一致性。
3.2. 有向拓扑的合作竞争网络下的比例一致性分析
本小节讨论有向网络下的比例一致性问题。相比于无向拓扑,有向拓扑的情形更为复杂。由引理5,若符号有向图G包含一棵有向生成树,则0是M的简单特征值,其他特征值的实部全大于0。设 是M的非零特征值,且设 。
定理3 假设 是可控的,且符号有向图G包含一棵有向生成树,则利用控制协议(2),多智能体系统(1)实现比例一致性当且仅当以下 个系统:
 (23)
(23)
是渐近稳定的,其中 , 是M的非零特征值。
证明 令 是矩阵 关于零特征值的左特征向量,且 。显然满足 。
令 ,其中 ,即向量形式为:
(24)
首先证明系统(1)达到比例一致性当且仅当 。
由于 ,则 ,使得 。与定理1类似,由 的定义,可以得到系统(1)达到比例一致性当且仅当 。
下证 趋于0当且仅当 个系统(23)渐近稳定。
根据式(5),可得:
(25)
由引理5,存在可逆矩阵T,使得 ,其中J是M的约当标准形,U中对角线元素是M的非零特征值,且令 , , 。
令 ,则:
(26)
记 , 。由于:
(27)
则:
(28)
根据式(26)和(28),可得:
(29)
与定理1类似,可以得到多智能体系统(1)实现比例一致性当且仅当以下 个系统:
(30)
是渐近稳定,其中 。
定理4 假设 是可控的,且符号有向图G包含一棵有向生成树。如果取 和 ,其中矩阵Q是引理3中的矩阵,那么对于任意初始状态,多智能体系统(1)实现比例一致性。
证明 构建以下Lyapunov函数:
(31)
为了方便计算,设 ,其中 和 分别是 的实部和虚部。于是沿式(31)对 进行求导,可得:
(32)
由于 ,式(32)可转化为:
(33)
再根据 ,则式(33)可得:
(34)
根据引理3,可得:
(35)
则由式(34),可得:
(36)
所以可得系统(30)渐近稳定。再根据定理3,可以得到系统(1)实现比例一致性。
4. 数值仿真与分析
本小节给出具体的例子来验证理论结果的正确性和有效性。考虑由五个智能体组成的多智能体系统,智能体的动态方程为:
其中,五个智能体的初始状态 都是随机选取的,取 。
例1 系统(1)的无向通信拓扑G如图1所示。
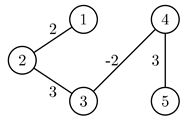
Figure 1. Undirected communication topology G of the system
图1. 系统的无向通信拓扑G
由图1可以得到图G的拉普拉斯矩阵为:
通过计算,可以得到:
其中, 是矩阵M的最小非零特征值。
根据定理2,取耦合强度 ,各个智能体的状态轨迹如图2所示,图3给出了 的轨迹曲线,可以看出系统(1)实现比例一致性。

Figure 2. State trajectories of multiple agents in the undirected topology
图2. 无向拓扑下各智能体的状态轨迹
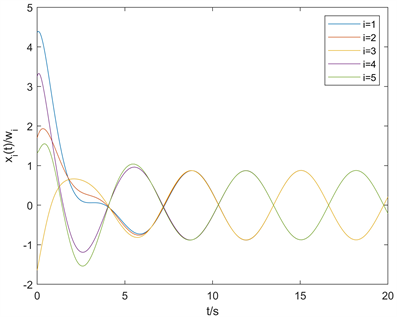
Figure 3. Trajectories of in the undirected topology
图3. 无向拓扑下 的轨迹
例2 系统(1)的有向通信拓扑G如图4所示。
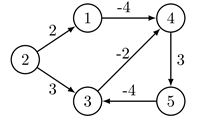
Figure 4. Directed communication topology G of the system
图4. 系统的有向通信拓扑G
由图4可以得到图G的拉普拉斯矩阵为:
通过计算,可以得到:
其中, 是M的非零特征值的最小实部。
根据定理4,取耦合强度 ,各个智能体的状态轨迹如图5所示,图6给出了 的轨迹曲线,可以看出系统(1)实现比例一致性。

Figure 5. State trajectories of multiple agents in the directed topology
图5. 有向拓扑下各智能体的状态轨迹

Figure 6. Trajectories of in the directed topology
图6. 有向拓扑下 的轨迹
5. 结论
针对具有一般线性动态的多智能体系统,本文研究了合作竞争网络下的比例一致性问题。首先,研究了无向网络拓扑下的比例一致性问题,应用代数图论和矩阵理论的知识,将比例一致性问题转化为一组低维系统的稳定性问题,然后利用Lyapunov稳定性理论得到了该低维系统稳定的条件,证明了系统通信拓扑连通时,所给的协议能解决比例一致性问题。接下来,研究了有向网络拓扑下的比例一致性,证明了系统通信拓扑仅包含一棵生成树时,所给的协议能解决比例一致性问题。理论分析表明,当耦合强度大于一个阈值时,多智能体系统能够实现比例一致性。最后,通过两个数值仿真的例子验证了理论结果的正确性和有效性。
文章引用
李琳玉,唐朝君. 合作竞争网络下的多智能体系统比例一致性
Scaled Consensus of Multi-Agent Systems in the Cooperative-Competitive Networks[J]. 动力系统与控制, 2024, 13(02): 68-80. https://doi.org/10.12677/dsc.2024.132007
参考文献
- 1. Qin, J., Ma, Q., Shi, Y., et al. (2016) Recent Advances in Consensus of Multi-Agent Systems: A Brief Survey. IEEE Transactions on Industrial Electronics, 64, 4972-4983. https://doi.org/10.1109/TIE.2016.2636810
- 2. Zhang, X., Yang, H. and Zhong, S. (2016) Lag Synchronization of Complex Dynamical Networks with Hybrid Coupling via Adaptive Pinning Control. Journal of Nonlinear Sciences and Applications, 9, 4678-4694. https://doi.org/10.22436/jnsa.009.06.107
- 3. Zhang, R., Zeng, D., Zhong, S., et al. (2017) Event-Triggered Sampling Control for Stability and Stabilization of Memristive Neural Networks with Communication Delays. Applied Mathematics and Computation, 310, 57-74. https://doi.org/10.1016/j.amc.2017.04.028
- 4. Hu, H., Yu, W., Wen, G., et al. (2016) Reverse Group Consensus of Multi-Agent Systems in the Cooperation-Competition network. IEEE Transactions on Circuits and Systems I: Regular Papers, 63, 2036-2047. https://doi.org/10.1109/TCSI.2016.2591264
- 5. Shi, L., Cheng, Y., Shao, J., et al. (2022) Cucker-Smale Flocking over Cooperation-Competition Networks. Automatica, 135, Article ID: 109988. https://doi.org/10.1016/j.automatica.2021.109988
- 6. Chesson, P. and Kuang, J.J. (2008) The Interaction between Predation and Competition. Nature, 456, 235-238. https://doi.org/10.1038/nature07248
- 7. 邵晋梁, 石磊, 李彤, 张希琳. 合作竞争网络下的多智能体系统链路故障检测[J]. 中国科学(信息科学), 2022, 52(8): 1500-1512. https://doi.org/10.1360/SSI-2021-0120
- 8. 何月. 基于合作竞争网络的多智能体系统协同行为分析[D]: [硕士学位论文]. 杭州: 杭州电子科技大学, 2020.
- 9. Liu, J., Li, H., Ji, J., et al. (2020) Group-Bipartite Consensus in the Networks with Cooperative-Competitive Interactions. IEEE Transactions on Circuits and Systems II: Express Briefs, 67, 3292-3296. https://doi.org/10.1109/TCSII.2020.2986258
- 10. Shang, Y. (2017) Finite-Time Scaled Consensus through Parametric Linear Iterations. International Journal of Systems Science, 48, 2033-2040. https://doi.org/10.1080/00207721.2017.1309593
- 11. Pandey, P.K., Adhikari, B. and Chakraborty, S. (2019) A Diffusion Protocol for Detection of Link Failure and Utilization of Resources in Multi-Agent Systems. IEEE Transactions on Network Science and Engineering, 7, 1493-1507. https://doi.org/10.1109/TNSE.2019.2936468
- 12. Gong, X., Cui, Y., Shen, J., et al. (2020) Distributed Prescribed-Time Interval Bipartite Consensus of Multi-Agent Systems on Directed Graphs: Theory and Experiment. IEEE Transactions on Network Science and Engineering, 8, 613-624. https://doi.org/10.1109/TNSE.2020.3047232
- 13. Roy, S. (2015) Scaled Consensus. Automatica, 51, 259-262. https://doi.org/10.1016/j.automatica.2014.10.073
- 14. Cheng, Y., Shi, L., Shao, J., et al. (2020) Sampled-Data Scaled Group Consensus for Second-Order Multi-Agent Systems with Switching Topologies and Random Link Failures. Journal of the Franklin Institute, 357, 2868-2881. https://doi.org/10.1016/j.jfranklin.2019.11.041
- 15. 范志鹏. 具有输入饱和的多智能体系统非负连边比例一致性研究[D]: [硕士学位论文]. 武汉: 华中科技大学, 2023.
- 16. Sun, S.H., Zhao, L. and Jia, Y.M. (2014) Similitude Design Method for Motion Reconstruction of Space Cooperative Vehicles. Journal of Astronautics, 35, 802-810.
- 17. Wen, G.H., et al. (2014) Distributed Consensus of Multi-Agent Systems with General Linear Node Dynamics and Intermittent Communications. International Journal of Robust and Nonlinear Control, 24, 2438-2457. https://doi.org/10.1002/rnc.3001