Open Journal of Transportation Technologies
Vol.
12
No.
05
(
2023
), Article ID:
71721
,
9
pages
10.12677/OJTT.2023.125043
通讯网络影响下多车协同驾驶控制策略研究
戴润佳1,刘晓锋1,郭蓬2,邱洁1
1天津职业技术师范大学,汽车与交通学院,天津
2中汽研(天津)汽车工程研究院有限公司,天津
收稿日期:2023年7月6日;录用日期:2023年8月25日;发布日期:2023年9月4日

摘要
随着通讯技术的快速发展,车辆逐渐从自动驾驶的单车智能逐步过渡到多车协同智能控制,由此提升了车辆的运行安全和效率。在多车协同控制方面,现有研究多以理想通讯为主,未考虑实际环境中车车间的通讯干扰问题。本研究考虑通信网络影响,提出了一种基于干扰观测器的PID控制多车协同控制方法,其中,干扰观测器提供估计的干扰信号信息,然后将该信息纳入到PID控制器中,以分析车队运行的稳定性。接着,建立车队行驶场景,采用Matlab/Simulink仿真,仿真结果表明:受干扰车辆速度最大误差从3.56 m/s降低至0.27 m/s,这表明在车车通讯受干扰的情况下,本文提出的方法仍能提高车队运行的智能控制水平。
关键词
车路协同,协同自适应巡航,有损通讯,智能网联汽车

Control Strategy of Multi-Vehicle Cooperative Driving on the Influence of the Communication Network
Runjia Dai1, Xiaofeng Liu1, Peng Guo2, Jie Qiu1
1School of Automotive and Transportation, Tianjin University of Technology and Education, Tianjin
2CATARC (Tianjin) Automotive Engineering Research Institute Co., Ltd., Tianjin
Received: Jul. 6th, 2023; accepted: Aug. 25th, 2023; published: Sep. 4th, 2023

ABSTRACT
With the rapid development of communication technology, vehicles are gradually transitioning from single-vehicle intelligence in autonomous driving to collaborative multi-vehicle intelligent control, thereby enhancing operational safety and efficiency. In the realm of multi-vehicle collaborative control, existing research primarily focuses on ideal communication scenarios, overlooking the issue of communication interference between vehicles in real-world environments. This study takes into account the influence of communication networks and proposes a PID control-based multi-vehicle collaborative control method using an interference observer. The interference observer provides estimated interference signal information, which is then incorporated into the PID controller to analyze fleet operation stability. Subsequently, a scenario of fleet driving is established, and Matlab/Simulink simulations are conducted. The simulation results demonstrate that the maximum speed error of the affected vehicles is reduced from 3.56 m/s to 0.27 m/s. This indicates that even in the presence of communication interference between vehicles, the proposed method in this paper can still enhance the level of intelligent control in fleet operation.
Keywords:Cooperative Vehicle Infrastructure, CACC, Lossy Communication, Intelligent Connected Vehicle

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着我国汽车产业的快速发展,汽车的智能化、网联化趋势日益显现。智能网联汽车(Intelligent Connected Vehicle, ICV)作为集智能汽车与车联网于一体的新型车辆,是未来汽车发展的主流方向。
自适应巡航控制系统(Adaptive Cruise Control, ACC)已广泛应用于乘用车。ACC车辆使用车载传感器(如毫米波雷达、相机等)来测量相对速度和与前车的距离,然后实现车辆的加减速自动控制。协作式自适应巡航控制(Cooperative Adaptive Cruise Control, CACC)系统,采用车对车(Vehicle to Vehicle, V2V)通信将前车速度、位置等信息直接传输至后车。先进的协作系统拥有更复杂的通信类型,实现更低的信息传输延时。
通讯技术是智能网联发展的一大挑战。目前,V2V采用的无线通讯技术,在现有的技术水平下,不可避免的发生丢包、延误、干扰的情况。智能网联汽车拥有多维度的协同通信设施,如V2V、V2I (Vehicle to Infrastructure)等,这些会导致大量干扰信号。此外,5G通信也可能产生某些干扰。
针对网联环境下的多车协同研究,国外研究开展较早,其研究成果大致可以分为2类:第一类研究关注于对V2X无线通讯进行改进研究,Khokhar等 [1] 提出了一个现实和有效的电波传播模型,以处理V2X通信中不同大小的静态和移动障碍物。Kleinow等 [2] 使用商业仿真软件包(Altair的WinProp套件) V2X通信模型,用于预测不同遮挡器设置场景下微波频率的电磁场强度。Iftikhar [3] 提出了一种去中心化的深度强化学习(DRL)算法,在满足V2V通信链路集的时延和可靠性约束的同时,优化车辆到基础设施用户的信道容量聚合潜力。第二类研究,主要运用仿真手段对CACC车队进行编队仿真。Jeroen等 [4] 对于协同自适应巡航的延迟和数据包丢失等通信障碍,将其降级为传统的自适应巡航控制,从而增加车队的稳定性。Vegamoor等 [5] 在有损V2V通信信道下,使用CTHP策略运行的CACC队列,丢包对关键时程的影响,推导出最小稳定车头时距与数据包接收概率之间的反比关系,该关系可实现CACC中目标车头时距的实时调整。
国内学者肖凌云等 [6] 研究了因距离传感器和无线通信系统的特性所引起的信息延迟对自动驾驶车队稳定性的影响,结果表明考虑信息延迟的前导–前导框架(LPF)和前导–后继框架(PSF)可以保证车队的稳定性。岳伟等 [7] 建立了车队通讯网络诱导因素影响下的混合车队控制模型,在该模型基础上设计可以解决车队通讯网络影响的控制算法,可实现车队的稳定运行控制,而且使车队控制效果得到改善。朱政泽等 [8] 对于多车协同中的通讯问题,基于零阶保持(Zero Order Hold, ZOH)信息处理机制,建立控制模型,运用非线性系统状态估计算法进行延迟补偿。ZOH信息处理机制能够解决丢包、乱序问题,并根据非线性系统状态估计算法补偿网络延迟,优化控制律,提升车队稳定性。袁策 [9] 以车–车局域交互和车–路广域交互两种交互方法为基础,提出一种混合域下的货运车队车联新方案,将车辆两两编组结对,这种组内V2V、组间V2I的架构能够有效降低交互信息量。谭晓等 [10] 研究了遭受拒绝服务(DoS)攻击的CACC系统的安全弹性控制问题,提出了一种高增益观测器来估计包括时滞在内的车辆状态,通过提出时间延迟补偿算法设计了弹性控制器,以减轻DoS攻击的影响。
目前的研究主要集中在V2X无线通讯改进及对通讯延迟、通讯攻击方面的研究,而对车车之间发生外界通讯干扰和车队自主降低外界干扰的研究还相对较少。因此,开展通讯网络影响下多车协同驾驶控制策略研究,对提升车队运行控制水平具有重要的应用价值。
2. 理想通讯下的多车协同驾驶控制方法
在实现多车协同驾驶控制的过程中,车辆之间的高效通讯和协调至关重要的。CACC是一种利用前方车辆加速度信息的方案,如图1所示。在系统中,前方车辆通过无线通信技术将自身的加速度和位置信息传递给后方车辆。后方车辆利用接收到的加速度与位置信息,通过控制算法来调整自身的速度和车距,以实现与前方车辆的协同行驶。为了提高车队控制的精准度,需要对CACC系统进行合理的搭建,并确定构建的CACC系统在理想通讯下具有良好的稳定性与安全性。

Figure 1. Information transfer of vehicle workshop
图1. 车车间信息传递
车队运行控制具有两个主要目标:其一是使前车与后车的速度保持一致,如公式(1)所示;其二是确保前车与后车之间保持一定的安全距离,以避免剧烈变化,如公式(2)所示。其中,v代表速度,x代表车辆位置,d表示纵向安全距离;下角标1表示领航车,i表示主车,i − 1表示前车。
(1)
(2)
本研究暂考虑车辆纵向运行,将纵向队列控制视为单输入单输出系统。根据牛顿第二定律,可以推导出加速度与牵引力、空气阻力以及滚动阻力之间的关系(4),从而建立起车辆纵向非线性动力学模型。
(3)
(4)
其中: 是迎面风阻系数,f是滚动摩擦阻力。 是实际作用在车轮上的驱动力, 、 、 分别是第i辆车的质量、加速度、速度。
实际车间距与根据间距策略得出的期望安全间距,两者保持一致,是CACC系统的目标。因此,多车协同驾驶的首要任务是最佳跟车距离模型,并应用合理的纵向控制策略,以确保实际误差保持在安全范围内,并提高整个车队的稳定性。本研究采用固定车头时距控制策略,对车队进行建模。理想车间距受主车速度和车头时距的共同影响,并且可以通过公式(5)表示其车间距误差,c为车头时距, 为第i辆车速度, 是第i辆车的长度。
(5)
在CACC系统中加入常规PID控制模式,通过闭环PID控制来车辆位移。在短时间内计算出后车的目标位移,同时利用车辆动力学模型进行实时的速度跟踪,将实际位移和期望位移的误差进行调节,并将PID控制器调节后的期望加速度输出到后车公式中,得出后车加速度及位移。
3. 通讯网络影响下的多车协同驾驶控制方法
在一个5G蜂窝移动通信服务内,C-V2X内的车辆将与5G通信用户一起分配无线通信资源,当C-V2X内的车辆与5G通信用户共享相同的频谱资源时,通信用户的D2D通信则会对原有的5G移动通信网络产生干扰 [11] 。本节研究在通信干扰的环境下车辆队列系统的稳定性,并提出一种基于干扰观测器的PID控制模型,实现多车协同控制,解决外界信号干扰的影响,该控制策略如图2所示。
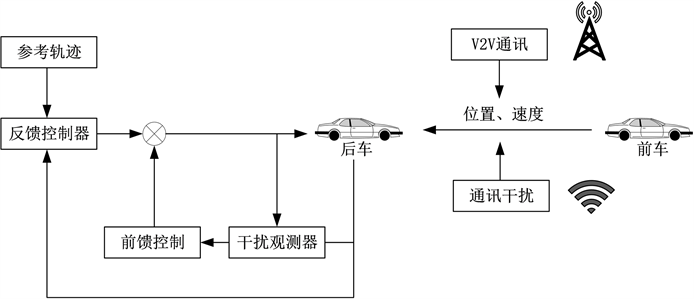
Figure 2. PID control multi-vehicle cooperative control strategy based on interference observer
图2. 基于干扰观测器的PID控制多车协同控制策略
现实场景中,V2V通讯会发生外部信号干扰情况,后车实际接受信号与前车传出信号出现偏差,导致CACC系统安全性与稳定性下降。为解决这一问题,本文引入基于干扰观测器的PID控制。干扰观测器在实时监测和估计外部干扰信号的同时,将其视为一种系统输入,相当于引入了一种虚拟控制信号。通过将干扰估计项与控制器的输出相结合,形成新的控制信号,控制系统能够对干扰作出智能响应。在此过程中,干扰观测器起到了一个“智慧”的作用,它不仅能够准确估计干扰的大小和影响,还能将这些信息用于实时调整控制器的输出,以实现对干扰的主动抵消。
在固定车头时距的多车协同控制中,车速将作为判断车队系统稳定性的重要性能指标。需要减轻通讯干扰对车速的影响,因此设计基于干扰观测器的PID控制中,需要设置针对车速的误差项、估计外界干扰信号对速度影响的干扰项、干扰观测器传递函数以及干扰观测器积分滤波器进行设计。控制系统通过比较实际输出与期望值的误差,根据误差产生控制信号,从而调整系统的行为,使输出逐渐趋向于期望值。误差项可写为:
(6)
其中: 是前车的速度, 是后车的速度, 表示前车的速度与后车的速度之间的差值。
由于车车通讯中出现了外界信号干扰,导致后车的速度控制受到干扰,因此引入干扰估计项 ,用于估计外界干扰信号对速度的影响。
为了估计和处理外部干扰信号,以提高系统的鲁棒性和控制性能,需要设置干扰观测器,从而更好地进行干扰的补偿。干扰观测器主要作用是估计外部干扰信号,并将其抵消,从而减小干扰对控制系统的影响。干扰观测器的传递函数设为 ,将 设计为一个一阶滤波器。
(7)
其中: 是干扰观测器的滤波器增益,用于调节干扰信号的估计强度,s表示频域的复频率。
在实际控制过程中,干扰信号可能会包含持续的偏差或变化,积分滤波器能准确地估计累积的干扰效应。在干扰观测器中,处理干扰信号的积分部分,有助于消除系统的稳态误差,特别是在长时间运行中,消除持续的偏差。本文将积分滤波器 设计为一个一阶积分器。
(8)
将 和 带入干扰估计项 中,得到干扰估计项的表达式:
(9)
干扰观测器的输出 是对实际干扰信号 的估计。将估计项添加到PID控制器的输出中,作为控制信号的一部分。当干扰信号影响系统时,干扰观测器会根据估计值进行相应补偿,使控制器的输出能更准确地抵消干扰对系统的影响。重新建立带干扰观测器的PID控制模型,将速度控制输入 修改为 ,并加入干扰估计项:
(10)
其中: 、 、 分别是PID控制器的比例增益、积分增益和微分增益,用于调节控制器的性能; 是时间常数。
4. 仿真分析
在Matlab/Simulink中搭建一个包含领航车在内的6辆车的车队,每辆车配置相同。每辆车为0、1、2、3、4、5,从前向后编号。设x0 = 30 m,x1 = 25 m,x2 = 20 m,x3 = 15 m,x4 = 10 m,x5 = 5 m。设定固定的车头时距为0.9秒/辆,设置初始速度均为0 m/s。对车辆起步、平稳、减速停车运行状态进行仿真,仿真时长120 s。
4.1. 理想通讯下结果分析
对理想通讯下建立的模型进行仿真,得到位移仿真曲线图,如图3所示。曲线展示了车队中每辆车在时间轴上的位置变化。
在图3中,以平稳运行时的第54秒为例,车辆之间的相对间距Δx约为3米,这表明车队内的车辆之间保持着相对较小的间隔。同时在平稳运行状态下,车队能持续维持此跟车距离。也就是说在车辆间通信理想情景下,车队能够成功地控制车辆之间的间距,使其在稳定的范围内。车队的速度仿真结果如表1所示。

Figure 3. Displacement curve
图3. 位移曲线

Table 1. Vehicle speed simulation data
表1. 车速仿真数据
选择起步、平稳和减速这三个具有代表性的时间段,并观察在这些时间段内的具体速度情况。结果显示CACC系统在仿真过程中表现良好。
在起步阶段,CACC系统能实现平稳起步,各车能有效控制自身车速。从表1中,可以看出第10秒、13秒、18秒,各车的车速之间速度最大误差不超过4 m/s。使得车队中的各车辆能保持在给定的跟车时距内不发生太大偏移,避免碰撞风险。
在平稳行驶阶段,CACC系统能够稳定地维持车队内车辆的速度一致性。以第51秒、55秒、60秒为例,通过精确的通信和控制,CACC系统使领航车能够准确地传递速度指令给跟随车辆,速度误差最大控制在0.5 m/s以内,从而实现车队的平稳行驶。
在减速阶段,多车协同车队中车辆速度能在保持跟车距离上,进行减速。如第70秒,车速误差为2.84 m/s。这表明该模型在减速停车上,车队能参照领航车车速的指令,按一定减速度进行减速,提供安全性。
4.2. 通讯干扰下仿真结果
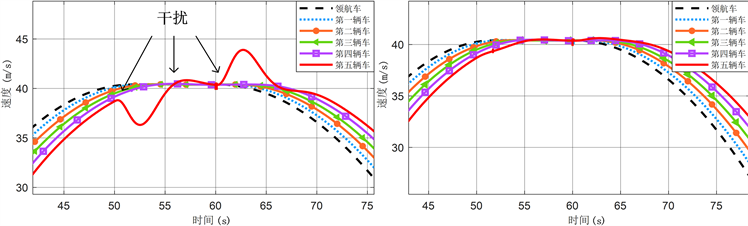
根据前文理想通讯下的车队模型。假设车队在第四辆车向后通讯时发生了干扰,导致后车无法准确收到领航车传递的控制指令和车辆状态信息。导致后车在速度调整和车距控制方面存在不准确的情况。同时假设仿真第50秒至第60秒发生3次干扰。干扰后仿真结果,如图4(a)所示,干扰后车速对比如表2所示。
Table 2. Comparison of speed after interference
表2. 干扰后车速对比
假定车辆行驶第50秒发生第一次干扰,从表2中可看出,干扰发生后第五辆车车速发生偏移。第52秒,到达本次干扰车速与前车车速误差的峰值,其速度误差达到了3.8 m/s,与理想通讯下的原车速差达到3.56 m/s。第二次干扰导致了从55秒至57秒的速度波动。第三次干扰同样也导致了干扰后车辆速度误差超过了3 m/s。误差数据对比表明,V2V通讯在遭受通讯干扰后,会导致车速快速大量偏差。根据前文队列控制的判断,此误差超过可接受阈值,导致车队的不稳定性。
4.3. 基于干扰观测器的PID控制仿真结果
在所构建的车队模型中,引入了基于干扰观测器的PID控制策略。在基于干扰观测器的PID控制的车队模型中,假设车队在第四辆车向后通讯时发生了干扰,同时模拟第50秒至第60秒期间出现了3次干扰情况,仿真结果如图4(b)所示。
 (a) 干扰后仿真结果 (b) 基于干扰观测器的PID控制仿真
(a) 干扰后仿真结果 (b) 基于干扰观测器的PID控制仿真
Figure 4. Comparison of simulation results
图4. 仿真结果对比
在基于干扰控制器的PID控制下,发生干扰时干扰能得到有效控制。取第一次干扰最大峰值发生时刻,第52.74秒。理想通讯下车辆车速为39.89 m/s,通讯干扰下车辆为36.33 m/s,经基于干扰观测器的PID控制下,车辆车速调整到了39.64 m/s。速度最大误差从3.56 m/s降低至0.27 m/s。第二次干扰波动从图4(b)中可看出,波动基本消除。达到前文队列控制的判定要求,因此基于干扰观测器的PID控制能在外界通讯干扰的情况下,有效地降低外界干扰对多车协同控制系统稳定性和安全性的影响,实现了更高的控制精度。
5. 结论
为解决车车通讯中可能出现的外界信号干扰对车队控制系统性能的影响问题。本文提出了基于干扰观测器的PID控制策略,实现多车协同控制。
为验证方法的有效性,进行了仿真分析,仿真实验结果证明了该方法能够使得干扰车的速度误差减小到较小的范围,使其接近理想速度。这意味着在车车通讯受到干扰的情况下,根据车队运行控制的要求,控制系统仍能保持较好的控制精度和稳定性。
本研究对通讯干扰下车辆跟踪控制性能下降的问题提供了重要的技术支持,通过引入干扰观测器的PID控制策略,车队控制系统能够抵抗外部干扰、提高控制精度、增强系统稳定性,对未来智能化与网联化汽车的安全性提升具有积极的影响。然而,研究中仍有一些局限性,实际应用中可能存在更复杂的网络情况,如网络覆盖、车辆移动性等,这需要进一步深入研究和改进。
基金项目
天津市智能交通技术创新团队重点培养专项(XC202028)、天津市教委科研计划项目(2022ZD016)。
文章引用
戴润佳,刘晓锋,郭 蓬,邱 洁. 通讯网络影响下多车协同驾驶控制策略研究
Control Strategy of Multi-Vehicle Cooperative Driving on the Influence of the Communication Network[J]. 交通技术, 2023, 12(05): 394-402. https://doi.org/10.12677/OJTT.2023.125043
参考文献
- 1. Khokhar, R.H., Zia, T., Ghafoor, K.Z., et al. (2013) Realistic and Efficient Radio Propagation Model for V2X Communications. KSII Transactions on Internet and Information Systems, 7, 1933-1954. https://doi.org/10.3837/tiis.2013.08.011
- 2. Kleinow, T., Lakshmanan, S., Richardson, P., et al. (2020) A Validated Model for Non-Line-of-Sight V2X Communications. 2020 Antenna Measurement Techniques Association Symposium (AMTA), Newport, 2-5 November 2020, 1-6.
- 3. Rasheed, I. (2022) Dynamic Mode Selection and Resource Allocation Approach for 5G-Vehicle-to-Everything (V2X) Communication Using Asynchronous Federated Deep Reinforcement Learning Method. Vehicular Communications, 38, Article 100532. https://doi.org/10.1016/j.vehcom.2022.100532
- 4. Ploeg, J., Semsar-Kazerooni, E., Lijster, G., et al. (2014) Graceful Degradation of Cooperative Adaptive Cruise Control. IEEE Transactions on Intelligent Transportation Systems, 16, 488-497. https://doi.org/10.1109/TITS.2014.2349498
- 5. Vegamoor, V.K., Kalathil, D., Rathinam, S., et al. (2019) Reducing Time Headway in Homogeneous CACC Vehicle Platoons in the Presence of Packet Drops. 2019 18th European Control Conference (ECC). Naples, 25-28 June 2019, 3159-3164. https://doi.org/10.23919/ECC.2019.8795647
- 6. Xiao, L.Y. and Gao, F. (2010) Effect of Information Delay on String Stability of Platoon of Automated Vehicles under Typical Information Frameworks. Journal of Central South University of Technology, 17, 1271-1278. https://doi.org/10.1007/s11771-010-0631-0
- 7. 岳伟, 郭戈. 通讯网络影响下自主车队的控制[J]. 控制理论与应用, 2011, 28(7): 1041-1048.
- 8. 朱政泽, 周海鹰, 付勇智, 等. 基于延迟补偿的网联式自主驾驶车辆协同控制[J]. 系统仿真学报, 2019, 31(7): 1448.
- 9. 袁策. 基于混合域通讯架构的货运车队主动悬架控制研究[D]: [硕士学位论文]. 青岛: 青岛理工大学, 2021.
- 10. Tan, X., Liu, B., Chen, J., et al. (2023) Observer-Based Resilient Control of CACC Vehicle Platoon Against DoS Attack. Automotive Innovation, 6, 176-189. https://doi.org/10.1007/s42154-023-00218-3
- 11. 代亮, 吴益钵, 汪贵平. 蜂窝车联网连通性研究综述与展望[J]. 计算机科学, 2023, 50(1): 285-293.