Open Journal of Circuits and Systems
Vol.
07
No.
03
(
2018
), Article ID:
26947
,
9
pages
10.12677/OJCS.2018.73011
Modeling and Simulation of Lever-Arm Effect in Airborne Weapon Transfer Alignment
Wei Li1, Yuheng Zeng2
1Xi’an Hanjing Electronic Technology Co., Ltd., Xi'an Shaanxi
2Telecommunications, University of New South Wales, Sydney, Australia
![]()
Received: Sep. 7th, 2018; accepted: Sep. 19th, 2018; published: Sep. 26th, 2018

ABSTRACT
The Transfer Alignment is an effective method of improving the initial alignment velocity and accuracy of inertial navigation system, and the lever-arm effect is an important factor affecting the accuracy of transfer alignment. The paper analyzed the reasons for the formation of the lever-arm effect, proposed an compensation algorithm for the lever-arm effect, built the mathematical model of velocity and acceleration, took a method of velocity and position matching in transfer alignment, used the method of calculating the compensation to compensate the lever-arm velocity, and diminished the effect of the lever-arm effect on the transfer alignment accuracy. Finally, the simulation shows that the model can effectively improve the alignment accuracy and alignment time.
Keywords:Airborne Weapons, Lever-Arm Effect e, Inertial Navigation System (INS), Velocity and Position Matching in Transfer Alignment
机载武器传递对准中杆臂效应的建模与仿真
李崴1,曾宇恒2
1西安瀚景电子科技股份有限公司,陕西 西安
2新南威尔士大学Telecommunications,悉尼,澳大利亚
![]()
收稿日期:2018年9月7日;录用日期:2018年9月19日;发布日期:2018年9月26日

摘 要
传递对准是提高惯性导航系统初始对准速度与精度的有效方法,而杆臂效应是影响传递对准精度的重要因素之一。本文通过分析杆臂效应的形成原因,建立杆臂效应速度和加速度数学模型,提出杆臂效应补偿算法,并以速度 + 姿态匹配传递对准方法为例,利用计算补偿方法对杆臂速度项进行补偿,减弱杆臂效应对传递对准精度的影响,最后通过仿真验证了该模型可以有效的提高对准精度和对准时间。
关键词 :机载武器,杆臂效应,惯性导航系统,速度 + 姿态匹配传递对准

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
机载武器传递对准是指弹载子惯导以机载主惯导输出的姿态、速度、位置等信息作为弹载子惯导初始对准的基准所进行的初始对准。但是在实际传递对准中,由于杆臂效应、挠曲变形以及颤振等因素的影响导致机载主惯导提供给弹载子惯导的信息需要进行一系列处理之后才能作为弹载子惯导的初始信息。
杆臂效应常见于惯导和其他导航系统的组合中,机载武器是由于悬挂于机翼上的导弹偏离载机质心具有一定距离,引起弹载子惯导系统加速度计与机载主惯导加速度计的测量存在一定的偏差,导致弹载子惯导系统的速度及位置导航参数存在误差。对于由于杆臂效应引起的一系列误差,可以通过传递机载主惯导系统输出信息使弹载子惯导装订到标称值里实现,从而减小杆臂效应对准精度的影响 [1][2]。
本文通过分析杆臂效应的形成原因,建立杆臂效应速度和加速度数学模型,提出杆臂效应补偿算法,并以速度 + 姿态匹配传递对准方法为例,采用计算补偿方法对杆臂速度项进行补偿,减弱杆臂效应对传递对准精度的影响,以提高机载武器传递对准精度。
2. 杆臂效应误差建模分析
机载主惯导在安装时要求安装位置与载机的重心重合,而弹载子惯导系统一般是安装在机翼或机尾,这样弹载子惯导和机载主惯导之间就存在一定的安装距离。当载机相对惯性空间产生角运动时,机载主惯导和弹载子惯导的加速度计会敏感到不同的比力而解算出不同的地速,这种现象称为传递对准中的杆臂效应。其中,机载主惯导和弹载子惯导输出的比力差异,称为杆臂加速度;机载主惯导和弹载子惯导解算出的地速的差异,称为杆臂速度。工程应用中,杆臂效应的补偿常采用力学方法,力学补偿方法要求杆臂长度准确已知,但是在大多数情况下杆臂长度是无法准确获得的 [3][4][5][6]。
2.1. 杆臂速度
将机载主惯导与弹载子惯导假设为两个不重合的质点,形象地认为两个质点之间存在的距离即为杆臂。假设机载主惯导相对地心的位置向量为 ,弹载子惯导相对地心的位置向量为 ,机载主惯导与弹载子惯导之间的相对位移向量为r,三者的位置关系如图1所示。
由图1可知:
(1)
根据哥氏定理将(1)式两边对地球坐标系e同时求导,再向n系投影:
![]()
Figure 1. The position of MINS and SINS
图1. 主子惯导位置示意图
(2)
如果不存在差值杆臂,则载机的对地速度 应该与弹体对地速度 ,但是实际上存在杆臂速度 ,由此可得杆臂速度为:
(3)
由于弹体子惯导相对于载体系是固定的,并且地球转动相对较慢,所以 , 。
则杆臂速度可简化为:
(4)
其中 为载机角速度。
可以由载机的主惯导陀螺仪测量得到, 可以由载机的主惯导输出的导航参数得到。在已知杆臂r之后,可以根据计算出的杆臂速度对主惯导输出的载机地速 进行补偿以便获得由主惯导输出所求得的弹体地速 ,与实际的弹体地速输出进行比较以便进行传递对准。
2.2. 杆臂加速度
根据哥氏定理可以将(1)式两边将惯性坐标系i对时间求二阶导,再向 系投影:
由于弹体子惯导相对于载体系是固定的,所以 ,由此可得:
(5)
由于位置的二阶导所得到的是加速度,所以
则由公式(4)可得:
化简后可得:
其中 为弹体比力在 系中的投影, 为载体比力在 系中的投影,令杆臂加速度为
(6)
在已知杆臂r之后,可以根据计算出的杆臂加速度惯导对主惯导加速度计输出的比力 进行补偿以便获得由主惯导输出所求得的弹体比力 ,与实际的弹体比力输出进行比较以便进行传递对准。
3. 机载武器传递对准的速度 + 姿态匹配
惯性导航系统在工作以前,其导航坐标系是不确定的,为了建立合适的导航坐标系,惯性导航系统在进入导航状态之前要先进行初始对准。由于初始对准的精度决定了后期惯性导航系统的导航精度,因此,国内外对惯性导航系统的初始对准研究比较重视,尤其是惯性导航系统在动基座上的初始对准技术。动基座的运动环境比较复杂,因此在动基座的初始对准中一般不采用自主式的对准方式,而是以载体的惯性导航系统作为对准基准,动态匹配机载主惯导系统与弹体子惯导系统的输出数据,完成弹体子惯导系统的初始对准,即传递对准 [7][8]。
机载武器系统中机载主惯导系统一般采用高精度捷联惯性导航系统,以便为弹载子惯导系统提供多种参考信息,而弹载子惯导可以只使用机载主惯导提供的一种参考信息,也可同时使用多种参考信息进行传递对准。目前传递对准基本匹配方案可分为两大类,分别称为计算参数匹配法(速度匹配、姿态匹配、位置匹配)和测量参数匹配法(角速度匹配和比力匹配)。计算参数匹配法和测量参数匹配法各有优缺点,两者的比较如下:
1) 由于计算参数匹配法能有效地抑制运载体振动环境的影响,因此精度较高;而测量参数匹配法精度受机翼挠曲变形及颤振影响很大,现实中又很难对挠曲和颤振进行精确建模,因此精度较差。
2) 计算参数匹配法产生足够大的观测量差值的过程需要一定的时间,故这种方法的对准时间较长;而测量参数匹配法直接使用惯性元器件的测量值作为观测量,因此对准速度较快 [9]。
3.1. 速度 + 姿态匹配传递对准原理
为快速获得弹载子惯导信息的输出,一般使用多种匹配方法进行传递对准,而且不同的匹配方法在载机不同的机动条件下所获得的信息也不同。在采用摇翼机动时,速度匹配传递对准无法将航向平台失准角分离出来,而姿态匹配传递对准在该机动条件下无法将北向平台失准角分离出来。基于速度匹配与姿态匹配方案的优缺点互补关系,本文在摇翼机动条件下采用速度 + 姿态匹配的快速传递对准方案,速度匹配实现水平姿态对准,姿态匹配实现航向对准 [10][11]。速度 + 姿态传递对准原理图如图2所示。
速度 + 姿态传递对准的工作原理如下:
1) 将机载主惯导的输出作为公共参考系统,而将弹载子惯导的速度匹配量和姿态匹配量视为两个独立的子系统,为解决系统噪声和量测噪声未知或未完全可知的情况下的滤波,两个子系统均采用模糊自适应卡尔曼滤波。
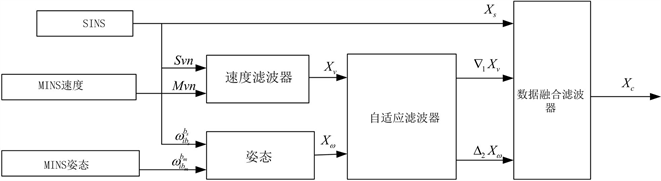
Figure 2. The principle of Velocity + Attitude transfer alignment
图2. 速度 + 姿态传递对准原理图
2) 对两个子惯导系统的输出信息采用权值模糊自适应滤波进行不同比重的信息分配,对公共参考系统采用联邦滤波算法进行信息融合以得到全局次优估计。
3.2. 速度 + 姿态匹配传递对准状态方程
设速度 + 姿态匹配传递对准的系统状态为:
,
其中 为子惯导平台失准角, 为子惯导速度误差, 为子惯导陀螺的常值漂移, 为弹体安装误差角, 为子惯导加速度计的常值偏置误差, 为机翼挠曲变形角, 为机翼挠曲变形角速度。
则速度 + 姿态匹配传递对准系统的状态方程为:
(7)
其中,未知量上的点代表一阶导, , , , 为地球自
装角速率,L为纬度, 为参考椭球子午圈, 为卯酉圈上的曲率半径, 为子惯导输出的载机姿态矩阵, 为子惯导陀螺的常值漂移, 为子惯导加速度计输出, 为子惯导加速度计的常值偏置误差, 为挠曲变形角速度, 为机翼的挠曲变形角。
由此可得速度 + 姿态匹配传递对准的系统状态空间模型为:
其中: 为子惯导的姿态矩阵;
;
式中, 为陀螺量测Gauss白噪声; 为加速度计量测Gauss白噪声, 为二阶挠曲白噪声驱动; , 。
3.3. 速度 + 姿态匹配传递对准量测方程
设主惯导输出的载机地速为 ,子惯导输出的弹体地速为 ,由主惯导输出计算得到的杆臂速度为 ,主惯导输出的载机姿态矩阵为 ,子惯导输出的弹体姿态矩阵为 ,已知的弹体安装坐标系 与弹体水平坐标系 之间的变换矩阵为 (即弹体安装矩阵) [12]。
速度 + 姿态匹配采用主子惯导速度误差作为速度量测,姿态量测采用姿态矩阵作为匹配量。
量测量选取为:
其中, , ,
式中 , 为主惯导的姿态误差角,可视为白噪声; 为子惯导的姿态误差角。
系统的量测方程为:
(8)
其中 为零均值Gauss白噪声, 为未知的量测噪声信号。
为主惯导输出的载机姿态矩阵, 为弹体安装坐标系 与弹体水平坐标系 之间的变换矩阵为(即弹体安装矩阵)。
4. 杆臂效应对机载武器传递对准精度的影响及分析
从公式(5)可以看出,只要主、子惯导之间存在相对位移,在载机具有角运动 时,杆臂加速度就会存在。其中,公式(6)的第一项是由于杆臂效应所引起的切向加速度,第二项是由于杆臂所引起的法向加速度。如果不对杆臂加速度进行考虑,滤波器会把主、子惯导之间的杆臂速度之差看成是由于失准角引起的,从而引起失准角估计误差。这样,就会影响与速度、加速度有关的匹配方案的准确性。因此,在进行与速度、加速度有关的匹配方案时,要考虑如何处理杆臂效应才能将失准角误差降到最低。
仿真条件:假设摇翼仿真时间为12 s,摇翼角度为30˚;传递对准初始位置为北纬34.03006˚、东经108.76405˚,海拔高度480 m;飞机的飞行速度为230 m/s;飞行高度为7000 m;航向角为60˚,俯仰角为0˚,横滚角为0˚。考虑机翼的杆臂效应,仿真轨迹如图3所示。
子惯导误差参数:陀螺常值漂移:1˚/h;
陀螺随机游走系数: ;
加速度计常值偏置误差: ;
加速度计量测白噪声标准差: ;
弹体安装误差角: ;
装订引起的子惯导失准角初值: ;
子惯导速度误差初值: 。
机翼存在挠曲变形和颤振。机翼颤振幅值为 ,颤振频率为 ;机翼挠
![]()
Figure 3. The trajectory which considers lever-arm effect
图3. 考虑杆臂效应的仿真轨迹
![]()
Figure 4. The misalignment error of Velocity + Attitude transfer alignment which consider lever-arm effect
图4. 考虑杆臂效应的速度 + 姿态匹配失准角估计误差
![]()
Figure 5. The velocity error of Velocity + Attitude transfer alignment which consider lever-arm effect
图5. 考虑杆臂效应的速度 + 姿态匹配速度估计误差
曲变形模型参数为 、 、 ,挠曲变形激励白噪声 方差为 ;
弹体沿载机横轴方向的杆臂长度为 ,弹体沿载机立轴方向的杆臂长度为 ;仿真中卡尔曼滤波周期取为20 ms。
根据速度匹配传递对准原理及惯导误差传播方程,速度误差直接反映在观测方程中,弹载子惯导的平台失准角是通过比力耦合到速度误差中,从而对平台失准角进行间接观测。
由图可以看出,补偿杆臂加速度前后的估计精度发生变化。由速度 + 姿态匹配失准角估计误差图4中可知,在未考虑杆臂效应时,30 s时水平失准角的估计误差为5',而考虑杆臂效应后,20 s时水平失准角的估计误差基本就已经达到了5'。由速度 + 姿态匹配速度估计误差图5中可知,速度 + 姿态匹配中速度误差估计值很快收敛,估计精度很高。
5. 结论
速度匹配传递对准是最为传统的一种匹配方式,在机载主惯导与弹载子惯导中,惯性仪表的缺陷和对准误差会引起速度误差的传播。因此,通过比较由主子惯性导航系统提供的速度误差值,能够获得对准误差的估计值,在某些情况下还可获得惯性敏感器漂移的估计值。姿态匹配传递对准对杆臂效应比较敏感,当机翼挠曲变形角变化范围增大时,姿态匹配传递对准的收敛速度和估计精度都会降低。此时需要对杆臂效应进行建模,当机翼挠曲变形角较小时或对杆臂效应建模适当的情况下,姿态匹配传递对准比速度匹配传递对准的收敛速度快。由仿真结果可以看出通过对传递对准中的杆臂效应准确建模,可以有效的提高速度 + 姿态传递对准的对准精度和对准时间。
文章引用
李崴,曾宇恒. 机载武器传递对准中杆臂效应的建模与仿真
Modeling and Simulation of Lever-Arm Effect in Airborne Weapon Transfer Alignment[J]. 电路与系统, 2018, 07(03): 84-92. https://doi.org/10.12677/OJCS.2018.73011
参考文献
- 1. 丁国强, 马军霞, 熊明, 乔相伟. 大失准角传递对准杆臂效应影响研究[J]. 郑州大学学报, 2015, 36(2): 110-113.
- 2. 刘锡祥, 徐晓苏. 大杆臂条件下传递对准算法的设计与仿真[J]. 系统仿真学报, 2011, 23(5): 1051-1058.
- 3. 孙伟, 孙枫. 基于SINS的杆臂效应误差补偿方法研究[J]. 控制与决策, 2012, 27(6): 891-903.
- 4. 李鹏飞, 奔粤阳, 张亚, 等. 基于捷联惯导系统的杆臂效应误差分析[J]. 传感器与微系统, 2012, 31(3): 53-55.
- 5. 高伟, 张亚, 孙骞, 等. 传递对准中杆臂效应的误差分析与补偿[J]. 仪器仪表学报, 2013, 34(3): 559-564.
- 6. 郝冰, 王红艳. 杆臂效应与挠曲变形一体化误差补偿技术研究[J]. 计算机工程与应用, 2012, 48(9): 218-221.
- 7. Song, L.J., Duan, Z.X., He, B. and Li, Z. (2018) Application of Federal Kalman Filter with Neural Networks in the Velocity And Attitude Matching of Transfer Alignment. Complexity, 2018, Article ID: 3039061. https://doi.org/10.1155/2018/3039061
- 8. 蒋鸿翔, 丁祝顺, 王媛媛, 卢小东. 大型平台的惯性稳定与地理坐标系姿态跟踪[J]. 导航与控制, 2017, 3(16): 12-17.
- 9. 常新, 韩军海. 一种“速度 + 姿态”传递对准方法的半实物仿真[J]. 导航与控制, 2010, 9(2): 7-12.
- 10. 宋丽君, 秦永元. 联邦模糊自适应卡尔曼滤波在速度 + 姿态传递对准中的应用[J]. 测控技术, 2013, 32(5): 130-133.
- 11. 宋丽君, 秦永元. H∞次优滤波在速度姿态匹配传递对准中的应用[J]. 传感技术学报, 2012, 25(1): 49-52.
- 12. Ahn, H.-S. and Won, C.-H. (2006) Fast Alignment Using Rotation Vector and Adaptive Kalman Filter. IEEE Transactions on Aerospace and Electronic Systems, 42, 70-83. https://doi.org/10.1109/TAES.2006.1603406