Open Journal of Circuits and Systems
Vol.
08
No.
03
(
2019
), Article ID:
32159
,
6
pages
10.12677/OJCS.2019.83007
Comparative Analysis of Series and Parallel Regenerative Braking Control Strategies
Yonghong Wang1, Zhifei Wu2*, Kai Feng2
1Dayun Automobile Co. Ltd., Yuncheng Shanxi
2Taiyuan University of Technology, Taiyuan Shanxi

Received: Aug. 21rd, 2019; accepted: Sep. 9th, 2019; published: Sep. 16th, 2019

ABSTRACT
The regenerative braking control strategies for electric vehicles have an important impact on their cruising range. In this paper, two different control strategies, series and parallel, are simulated by Matlab/Simulink. By comparing the SOC values after the same cycle condition, it is determined that the series regeneration control strategy is better, and the SOC value can be increased by 3.14% after the end of the FTP75 cycle condition.
Keywords:Electric Vehicle, Regenerative Braking, Series-Parallel, Control Strategy
串并联再生制动控制策略对比分析
王永红1,武志斐2*,冯凯2
1大运汽车股份有限公司,山西 运城
2太原理工大学,山西 太原

收稿日期:2019年8月21日;录用日期:2019年9月9日;发布日期:2019年9月16日

摘 要
电动汽车再生制动控制策略对其续航里程有着重要的影响,本文针对串联式和并联式两种不同的控制策略,使用Matlab/Simulink进行仿真,通过对比其相同循环工况后的SOC值,确定出串联式再生控制策略更优,在FTP75循环工况结束后能将SOC值提高3.14%。
关键词 :电动汽车,再生制动,串并联,控制策略

Copyright © 2019 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 前言
目前电动汽车的续航里程是其应用推广的最大问题,为了提高其续航能力,相关从业人员对各种方法进行研究和探索。研究表明,在城市行驶工况下,大约有50%甚至更多的驱动能量在制动过程中损失掉,郊区工况也有至少20%的驱动能量在制动过程损失掉 [1] 。因此,再生制动能量回收作为一种可工程应用的技术,学者们对其进行了大量的研究。卢珊等人通过建立再生制动模型,在ADVISOR平台中进行能量回收效率仿真 [2] 。杨小龙等人以良好制动性和能量回收率最大化为目标,针对某前驱纯电动汽车提出了基于多因素输入模糊控制的再生制动策略 [3] 。倪计民等人在考虑能量回收效率、汽车驱动形式、驱动强度和车辆重心位置的基础上,提出并研究了最大效率再生制动能量回收策略 [4] 。还有其他学者也针对提高能量回收率进行了相关工作 [5] [6] [7] ,目前串并联式策略的对比研究相对较少,但也有学者针对其数学模型进行了研究 [8] ,因此本文针对电动汽车的串并联再生制动控制策略对比分析研究。
本文使用动力电池的荷电状态(State of Charge, SOC)作为定量比较并联式再生制动策略与串联式再生制动策略的性能的评价指标。SOC用来反映电池的剩余容量,其数值上定义为剩余容量占电池容量的比值,常用百分数表示。其取值范围为0~1,当SOC = 0时表示电池放电完全,当SOC = 1时表示电池完全充满。电池SOC不能直接测量,只能通过电池端电压、充放电电流及内阻等参数来估算其大小,同时这些参数还会受到电池老化、环境温度变化及汽车行驶状态等多种不确定因素的影响。本文采用的SOC估算方法为最常用且较为成熟的安时积分法 [9] 。
(1)
其中,CN为动力电池额定容量;I为动力电池电流;η为充放电效率。
2. 再生制动力分配理论
再生制动系统相对于车辆起步或加速时,动力电池输出电能,使电机带动车轮转动,该系统将汽车的一部分动能通过电机发电转化为化学能储存到动力电池中,同时发挥制动作用。因此,再生制动只发生在驱动轮上。
对于双轴纯电动汽车,制动时由于车辆的惯性作用,大量的载荷前倾作用于前轴,可以瞬间提升前轴的最大制动力,故前驱型电动汽车比后驱型更有利于制动能量的回收。为了尽可能提高能量回收率,本文采用前驱型车型进行仿真研究。
对于前轮驱动汽车,本文提出了如图1所示的最大效率进行再生制动的制动力分配策略模型。该模型以车辆制动要求作为输入信号,综合考虑车辆速度以及电池荷电状态后按照控制策略输出液压制动力和再生制动力。
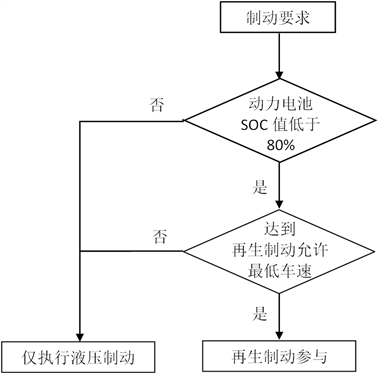
Figure 1. Braking power distribution strategy model
图1. 制动力分配策略模型
制动力控制模块首先判断当前动力电池的荷电状态,如果SOC值高于80%,为防止过充影响动力电池的使用寿命,选择不进行再生制动。接着,控制策略模块将车辆行驶速度与再生允许最小车速进行对比,车速过低时,电机发电效率较低,此时不宜进行再生制动,应当仅执行液压制动。
3. 再生制动能量回收策略
纯电动汽车再生制动力受诸多因素的约束而有限,当请求的制动力大于再生制动力时,需液压制动力参与制动。目前有关再生制动与液压制动共同作为车辆制动系统的研究中,根据制动力分配模式的不同可将再生制动系统分为并联式和串联式两种 [10] 。
3.1. 并联式
并联式再生制动系统中液压制动系统和再生制动系统相互独立。在电动汽车的制动过程中液压制动力一直存在,系统根据制动在液压制动力的基础上叠加再生制动力,并联式再生制动策略Simulink模型如图2所示。
并联系统简单高效,直接把再生制动力叠加到传统液压制动上,不需要对液压制动进行改进,同时保证了制动性能。
3.2. 串联式
串联式再生制动采用分段式分配再生制动与传统制动力。系统优先考虑使用再生制动力,在制动需求达到一定值后,液压制动同时介入,两种制动力相互协调达到系统总制动要求,串联式再生制动策略Simulink模型如图3所示。
这种方式可以使再生制动力更多地参与制动过程,但是控制复杂,需要改造传统制动。

Figure 2. Parallel regenerative braking system
图2. 并联式再生制动系统
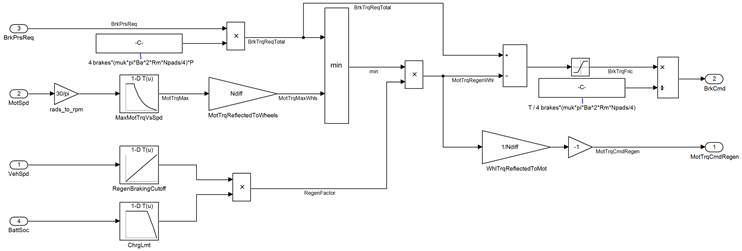
Figure 3. Series regenerative braking system
图3. 串联式再生制动系统
4. 串并联再生制动控制策略对比
为了可以定量的比较并联式再生制动系统与串联式再生制动系统的性能,本文就一辆典型前轮驱动乘用纯电动轿车进行仿真分析,整车仿真参数表见表1。

Table 1. Key parameters the vehicle
表1. 整车参数
仿真工况FTP75是美国所采用的一种市区模拟循环测试工况,循环工况图如图4所示。该工况第一部分为1972年美国环保局(简称EPA)用作认证车辆排放的测试程序(Federal Test Procedure 1972,简称FTP72,又称UDDS)。FTP72由冷态过渡工况(0~505 s)和稳态工况(506~1370 s)构成。1975年在FTP72基础上加上600 s热浸车和热态过渡工况(重复冷态过渡工况)。这4个阶段构成了FTP75,全程持续时间2475 s。
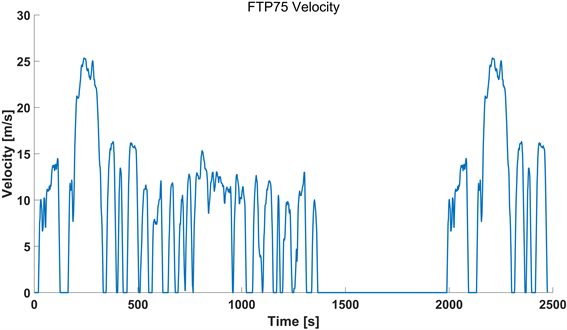
Figure 4. FTP75 cycle conditions
图4. FTP75循环工况
对本文制定的并联式再生制动策略与串联式再生制动策略分别进行仿真分析,可得到样车在FTP75工况过程中SOC值的变化曲线如图5。
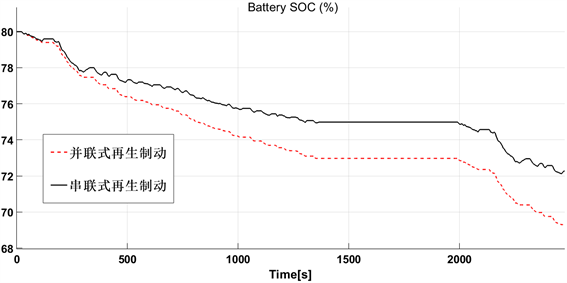
Figure 5. Changes in SOC values under two braking strategies
图5. 两种制动策略下SOC值的变化
通过分析,当循环工况结束时,并联式再生制动系统下SOC最终值为69.30%,串联式再生制动下SOC最终值为72.44%,两种再生制动策略在一个循环工况结束后SOC值相差3.14%,表明串联式再生制动的回收效率要高于并联式再生制动。
5. 结论
本文通过研究串并联再生制动控制策略,使用Matlab/Simulink分析得出,串联式再生制动控制策略更优,在FTP75循环工况下相对并联式再生制动控制策略的SOC值高出3.14%。研究表明,串联式制动系统具有较高的能量回收率,应当作为国内再生制动研究的主流发展方向。而并联式再生制动系统凭借其实施简易方便的优势,只适合于再生制动研发的初始阶段。
文章引用
王永红,武志斐,冯 凯. 串并联再生制动控制策略对比分析
Comparative Analysis of Series and Parallel Regenerative Braking Control Strategies[J]. 电路与系统, 2019, 08(03): 50-55. https://doi.org/10.12677/OJCS.2019.83007
参考文献
- 1. 王猛, 孙泽昌, 卓桂荣, 等. 电动汽车制动能量回收系统研究[J]. 农业机械学报, 2012, 43(2): 6-10.
- 2. 卢珊, 刘志强, 葛进, 等. 基于模糊控制的纯电动汽车再生制动策略仿真[J]. 长沙理工大学学报(自然科学版), 2017, 14(3): 90-96.
- 3. 杨小龙, 杨功正, 张泽坪. 基于多因素输入模糊控制的再生制动策略[J]. 湖南大学学报(自然科学版), 2017, 44(10): 17-24.
- 4. 倪计民, 陈琦, 石秀勇, 等. 基于底盘建模的纯电动车最大效率再生制动策略研究[J]. 小型内燃机与车辆技术, 2017, 46(4): 1-9.
- 5. 李晓瑞. 基于西安城市循环工况的纯电动汽车再生制动效率研究[D]: [硕士学位论文]. 西安: 长安大学, 2015.
- 6. 李秀芬, 雷跃峰. 纯电动汽车制动能量回收控制方法的研究[J]. 湖南科技学院学报, 2014(10): 56-57.
- 7. 初亮, 刘达亮, 刘宏伟, 等. 纯电动汽车制动能量回收评价方法研究[J]. 汽车工程, 2017, 39(4): 471-479.
- 8. 宋士刚, 李小平, 孙泽昌. 基于混合系统理论的串联式再生制动控制策略分析[J]. 汽车工程, 2015(3): 313-320.
- 9. 邓涛, 孙欢. 锂离子电池新型SOC安时积分实时估算方法[J]. 重庆理工大学学报(自然科学版), 2015, 29(1): 101-106.
- 10. 肖博一, 曾细强, 张震邦, 等. 纯电动汽车再生制动策略现状与展望[J]. 汽车电器, 2016(12): 1-3+6.