Journal of Aerospace Science and Technology
Vol.03 No.04(2015), Article ID:16713,7
pages
10.12677/JAST.2015.34010
Attitude Optimal Control of Space Robot Based on the Legendre Pseudospectral Method
Kaijie Chen1, Xinsheng Ge2
1College of Mechanical and Electrical Engineering, Beijing Information Science and Technology University, BISTU, Beijing
2College of Applied Science, Beijing Information Science and Technology University, BISTU, Beijing

Received: Dec. 9th, 2015; accepted: Dec. 23rd, 2015; published: Dec. 31st, 2015
Copyright © 2015 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
The optimal attitude control of free-floating space robot system with dual-arm is discussed in this paper by using Legendre pseudospectral method. The simplified robot system dynamics model is established based on the linear and angular momentum conservation of the system. And the system constraints and performance index function based on system joints dissipation energy are determined to describe the optimal control problem. Then the continuous trajectory optimization is transformed into a discrete nonlinear programming problem (NLP) by using Legendre pseudospectral method. And the energy-optimal solutions are obtained with a NLP solver. An optimal attitude control method for the space robot is obtained. At the end of this paper, numerical simulations on the free-floating space robot attitude control problems are given. And the results verify the effectiveness of Legendre pseudospectral method on solving the optimal attitude control problem.
Keywords:Space Robot, Legendre Pseudospectral Method, Nonholonomic Motion Planning, Optimal Control

基于Legendre伪谱法的空间机器人姿态运动的最优控制
陈凯捷1,戈新生2
1北京信息科技大学机电工程学院,北京
2北京信息科技大学理学院,北京

收稿日期:2015年12月9日;录用日期:2015年12月23日;发布日期:2015年12月31日

摘 要
采用Legendre伪谱法研究自由漂浮双臂空间机器人姿态运动最优控制问题。首先,根据系统动量矩守恒关系,对自由漂浮并带有双臂的平面型空间机器人建立动力学模型,并以系统关节的耗散能为性能指标,给出其最优控制问题描述。然后,利用Legendre伪谱法以多项式参数化近似状态变量与控制变量,微分方程用正交多项式近似,从而将连续最优控制问题转化为一组非线性规划问题求解。为解决空间机器人姿态规划问题提供了一种有效方法。最后,对自由漂浮双臂空间机器人姿态控制进行数值仿真,仿真结果表明Legendre伪谱法对解决该姿态运动最优控制问题的有效性。
关键词 :空间机器人,Legendre伪谱法,非完整运动规划,最优控制

1. 引言
随着空间技术飞速发展,宇航员在太空环境下的高危作业正逐步被空间机器人所替代[1] 。自由漂浮空间机器人在节省能源,提高生产效益,扩大空间站的作用等方面具有重要的意义。双臂空间机器人载体处于自由漂浮状态,载体的姿态会随着机械臂的相对运动而发生变化,增大了载体姿态控制难度的同时,为控制其姿态也提供了一种方法[2] 。Fernandes等[3] 根据空间机器人的非完整性质提出空间机器人的关节运动规划的最优控制方法;Nakamura等[4] 提出了非完整运动规划的双向Lyapunov方法;戈新生等[5] 利用非线性系统最优控制原理,给出了一类带有非完整约束的多体系统运动规划的最优数值方法。
伪谱法是一种基于全局插值多项式的直接配点法。伪谱法具有精度高、效率高等优点,并且具有收敛性,伪谱最优控制理论已被用于在军事和工业应用中的地面和飞行系统中[6] [7] 。伪谱法传统上主要应用于流体力学,近年来得到了相对广泛的研究[8] [9] 。Legendre伪谱法的算法具有可行性、一致性以及收敛性[10] 。该方法以Legendre-Guass-Lobatto (LGL)点作为插值节点,以Lagerange插值基函数来逼近所求状态变量,能够用较大积分步长得到较高精度。本文采用Legendre伪谱法进行姿态规划的最优控制,讨论了自由漂浮双臂空间机器人姿态控制问题。根据在自由漂浮的情况下系统总的动量矩守恒关系推导出系统的动力学方程。然后利用Legendre伪谱法将问题进行离散化,将其转化为非线性规划问题进行求解。最后采用该方法对空间双臂机器人进行数值仿真,验证其对该姿态运动规划问题的有效性。
2. 双臂空间机器人姿态优化问题描述
平面型双臂空间机器人模型如图1所示。设载体的质量为m,载体转动惯量为J,机械臂的质量分别中于两臂端部,载体质心C与机械臂转动关节A及B之间的距离分别为r,机械臂的长度均为l。设载体与水平线的夹角为 ,两臂与载体之间的夹角分别为
,两臂与载体之间的夹角分别为 和
和 。
。
忽略微弱的重力影响,载体姿态控制系统处于关闭状态,系统相对于总质心的动量矩守恒。在起始动量矩为零的条件下,可以将动量矩守恒对系统产生的约束看作一个非完整约束。
由动量矩守恒可导出系统约束方程,设系统的动能为
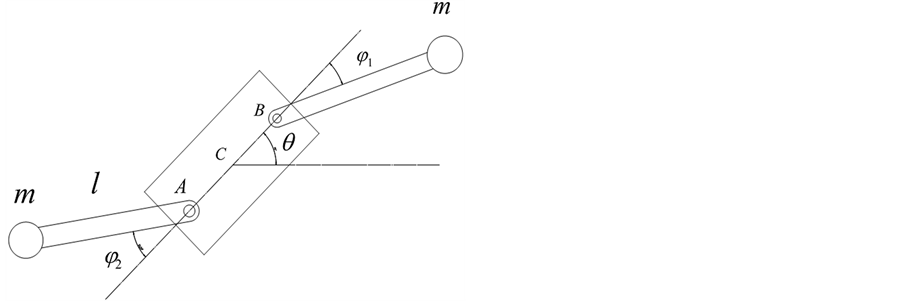
Figure 1. A simplified model of the space robot
图1. 空间机器人简化模型
 (1)
(1)
在自由漂浮状态下,因为 的变化对系统的动能不产生影响,由拉格朗日方程可得
的变化对系统的动能不产生影响,由拉格朗日方程可得
 (2)
(2)
可知 为常数。则系统的角动量
为常数。则系统的角动量 可以表示为
可以表示为
 (3)
(3)
若起始角动量为零,则非完整约束方程可写为以下形式
 (4)
(4)
其中各系数为
 (5)
(5)
取控制输入为两臂相对转动角速度 及
及 ,并设系统位形为
,并设系统位形为 ,则式(4)有如下形式
,则式(4)有如下形式
 (6)
(6)
其中
 ,
, (7)
(7)
设系统可控, 为Hilbert空间
为Hilbert空间 中定义在区间
中定义在区间 内的可测向量函数,根据最小能量控制原理,以机械臂关节所消耗能量为其性能指标,即
内的可测向量函数,根据最小能量控制原理,以机械臂关节所消耗能量为其性能指标,即
 (8)
(8)
3. 姿态优化问题的伪谱离散化
首先,对于该姿态优化问题引入归一化时间
 (9)
(9)
则姿态优化问题的状态方程(6)可写为
 (10)
(10)
引入状态变量 的Lagrange插值基函数,则
的Lagrange插值基函数,则
 (11)
(11)
其中 为拉格朗日插值基函数:
为拉格朗日插值基函数:
 (12)
(12)
式中 满足关系式
满足关系式 ,其中
,其中 若
若 ;
; ,若
,若 。
。
拉格朗日插值节点包含的LGL积分点是 ,
, 是下式的根
是下式的根
 (13)
(13)
式中 是
是 次Legendre多项式,边界节点−1和1也都包含在LGL积分点内,相应的权函数
次Legendre多项式,边界节点−1和1也都包含在LGL积分点内,相应的权函数 为
为
 (14)
(14)
姿态优化问题的中,系统动力学模型是其基本要素之一。而其中含有状态变量对时间的导数,那么状态变量 的导数可以通过微分矩阵
的导数可以通过微分矩阵 近似得到如下形式
近似得到如下形式
 (15)
(15)
其中 为
为 的矩阵,
的矩阵, 为其中第
为其中第 个元素,且有
个元素,且有
 (16)
(16)
若将Lagrange插值多项式(11)中的基函数 记作
记作
 (17)
(17)
则基于任意离散节点 的微分矩阵
的微分矩阵 有如下形式
有如下形式
 (18)
(18)
对控制变量也同样引入拉格朗日插值多项式
 (19)
(19)
在LGL伪谱法中,控制变量 的拉格朗日插值节点与状态变量
的拉格朗日插值节点与状态变量 插值节点完全重合。
插值节点完全重合。
对连续姿态优化问题的性能指进行伪谱离散近似。将能量最优性能指标经过伪谱离散后得到
 (20)
(20)
通过以上过程,原来的连续姿态优化问题已经转化为一个非线性规划问题(NLP)。
4. 仿真算例
基于第一部分所述双臂空间机器人模型,设置以下两个算例用以进行数值仿真。
算例1:设双臂空间机器人基本参数分别为:机器人的质量 ,转动惯量
,转动惯量 ,
, ,
, 。系统初始位形为
。系统初始位形为 ,终端位形为
,终端位形为 。即空间机器人臂1由初始位形0顺时针旋转
。即空间机器人臂1由初始位形0顺时针旋转 ,臂2由0顺时针旋转
,臂2由0顺时针旋转 ,载体的初始和终端位形保持不变。图2所示为空间机器人最优控制轨迹变化规律,图中实现表示载体转角
,载体的初始和终端位形保持不变。图2所示为空间机器人最优控制轨迹变化规律,图中实现表示载体转角 变化规律,虚线表示为臂1关节角
变化规律,虚线表示为臂1关节角 变化规律,点线表示臂2关节角
变化规律,点线表示臂2关节角 变化规律。图3为最优控制输入变化规律,其中实线表示控制变量
变化规律。图3为最优控制输入变化规律,其中实线表示控制变量 ,即臂1关节角相对角速度变化规律;虚线表示表示控制变量
,即臂1关节角相对角速度变化规律;虚线表示表示控制变量 ,即臂2关节角相对角速度变化规律。
,即臂2关节角相对角速度变化规律。
算例2:系统初始和终端位形分别为 ,
, ,即两臂分别由初始位形0顺时针旋转
,即两臂分别由初始位形0顺时针旋转 ,载体由初始位形0逆时针旋转
,载体由初始位形0逆时针旋转 。仿真结果如图4~5分别为空间机器人最优控制轨迹变化规律及最优控制输入规律。图中各曲线所示含义同算例一。
。仿真结果如图4~5分别为空间机器人最优控制轨迹变化规律及最优控制输入规律。图中各曲线所示含义同算例一。
仿真算例中,设置误差精度为 ,选取40个插值节点,经过6次迭代即到达最优指标值。其中,算例一控制两臂运动而使本体初始及终端姿态保持不变。而算例二则通过双臂相对载体转动来使载体发生所预设的姿态变化。对于算例一,空间机器人由初始位姿开始,在控制输入即两臂相对转动角速度如图3的变化规律下,载体转角最终到回到初始位置,但两臂与载体之间的夹角最终分别到达了
,选取40个插值节点,经过6次迭代即到达最优指标值。其中,算例一控制两臂运动而使本体初始及终端姿态保持不变。而算例二则通过双臂相对载体转动来使载体发生所预设的姿态变化。对于算例一,空间机器人由初始位姿开始,在控制输入即两臂相对转动角速度如图3的变化规律下,载体转角最终到回到初始位置,但两臂与载体之间的夹角最终分别到达了 和
和 。同样,对于算例二,载体由初始姿态经过5 s到达目标目标姿态
。同样,对于算例二,载体由初始姿态经过5 s到达目标目标姿态 。此过程中,两臂相对载体夹角经由图4所示变化规律最终分别到达
。此过程中,两臂相对载体夹角经由图4所示变化规律最终分别到达 及
及 。从数值仿真结果上来看,实现了对双臂空间机
。从数值仿真结果上来看,实现了对双臂空间机
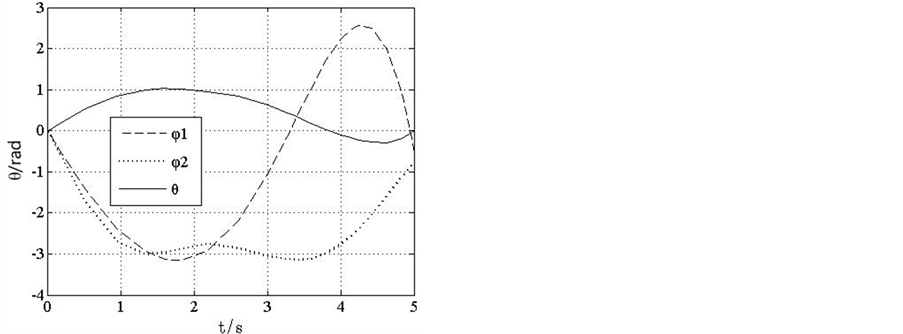
Figure 2. The optimal trajectory of the space robot (example 1)
图2. 空间机器人最优轨迹(算例一)
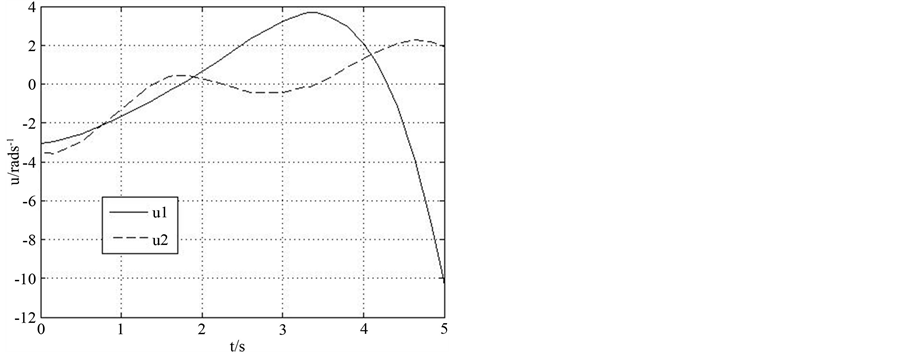
Figure 3. The optimal control input rule of the space robot (example 1)
图3. 空间机器人最优控制输入规律(算例一)
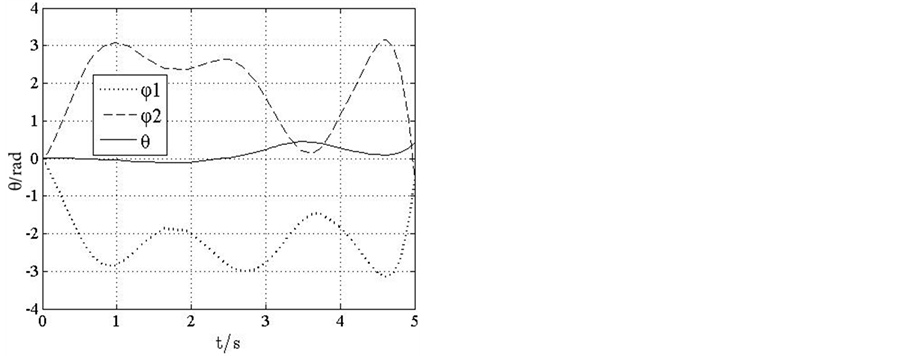
Figure 4. The optimal trajectory of the space robot (example 2)
图4. 空间机器人最优轨迹(算例二)
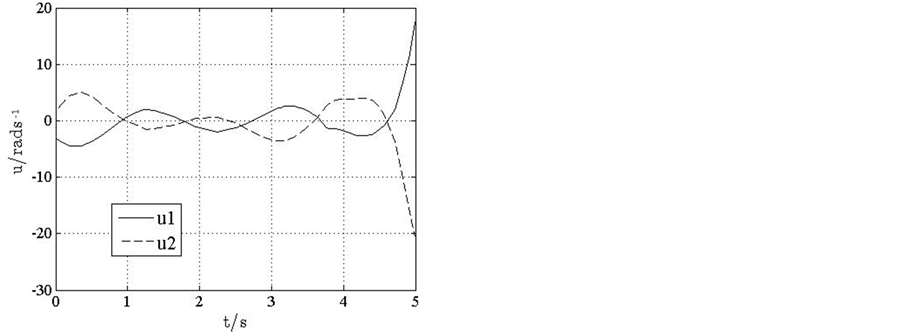
Figure 5. The optimal control input rule of the space robot (example 2)
图5. 空间机器人最优控制输入规律(算例二)
器人姿态规划。
5. 结语
本文使用Legendre伪谱法来研究自由漂浮双臂空间机器人姿态规划问题。以伪谱法离散化的思想将原有连续最优控制问题转化为非线性规划问题,为解决航天器姿态规划问题提出了一种有效的方法。从本文的分析及数值仿真可以看出,Legendre伪谱法对空间机器人的姿态规划问题的有效性。为解决空间非完整运动提供了一种有效的方法。
基金项目
中国国家自然科学基金(No. 11472058)。
文章引用
陈凯捷,戈新生. 基于Legendre伪谱法的空间机器人姿态运动的最优控制
Attitude Optimal Control of Space Robot Based on the Legendre Pseudospectral Method[J]. 国际航空航天科学, 2015, 03(04): 77-83. http://dx.doi.org/10.12677/JAST.2015.34010
参考文献 (References)
- 1. Tang, X.T. (2010) Backstepping Based Robust ANN Tracking in Inertial Space for Space Robot System with Dual- Arms. Journal of Minjiang University, 41, 35-40.
- 2. 戈新生, 张奇志, 刘延柱. 基于遗传算法的空间机械臂运动规划的最优控制[J]. 空间科学学报, 2000, 20(2): 185- 191.
- 3. Fernandes, C., Gurvits, L. and Li, Z.X. (1994) Attitude Control of a Space Platform/Manipulator System Using Internal Motion. International Journal of Robotics Research, 13, 289-304. http://dx.doi.org/10.1177/027836499401300401
- 4. Nakamura, Y. and Mukherjee, R. (1991) Nonholonomic Path Planning of Space Robots via a Bidirectional Approach. IEEE Transactions on Robotics & Automation, 7, 500-514. http://dx.doi.org/10.1109/70.86080
- 5. Ge, X.S. and Chen, L.Q. (2003) Motion Planning of a Nonholonomic Multibody System Using Genetic Algorithm. ASME 2003 International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers, 997-1002.
- 6. Benson, D. (2005) A Gauss Pseudospectral Transcription for Optimal Control. Massachusetts Institute of Technology.
- 7. Ross, I.M. and Karpenko, M. (2012) A Review of Pseudospectral Optimal Control: From Theory to Flight. Annual Reviews in Control, 36, 182-197. http://dx.doi.org/10.1016/j.arcontrol.2012.09.002
- 8. Elnagar, G., Kazemi, M.A. and Razzaghi, M. (1995) The Pseudospectral Legendre Method for Discretizing Optimal Control Problems. IEEE Transactions on Automatic Control, 40, 1793-1796. http://dx.doi.org/10.1109/9.467672
- 9. Gong, Q., Ross, I.M., Kang, W., and Fahroo, F. (2008) Connections between the Covector Mapping Theorem and Convergence of Pseudospectral Methods for Optimal Control. Computational Optimization & Applications, 41, 307-335. http://dx.doi.org/10.1007/s10589-007-9102-4
- 10. Gill, P.E., Murray, W. and Saunders, M.A. (2002) User’s Guide for SNOPT Version 7: Software for Large-Scale Nonlinear Programming. 2008, http://ccom.ucsd.edu/~peg/