Journal of Aerospace Science and Technology
Vol.04 No.02(2016), Article ID:17903,9
pages
10.12677/JAST.2016.42004
The Design and Performance Analysis of Hybrid Dynamical System with Multil-Rotor UAV
Jian Zong, Yun Wang, Jusheng Mao
School of Aircraft Engineering, Nanchang Hangkong University, Nanchang Jiangxi

Received: Jun. 9th, 2016; accepted: Jun. 26th, 2016; published: Jun. 29th, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
According to multi-rotor unmanned aerial vehicle’s disadvantages and the structure characteristic at the present, a hybrid dynamical system is being put forward for solving this relevant issue. Have designed and calculated with the hybrid dynamical system for multi-rotor unmanned aerial vehicle, and used the MATLAB/Simulink software to establish the hybrid dynamical system simulation model, there are some simulation and performance analysis for the hybrid dynamical system’s design. The results show that the hybrid dynamical system has the lower fuel consumption characteristic than single two-cycle engine in the same condition that type and output power and the hybrid dynamical system have the high reliability and without artificial recharge advantages, it also can reduce the multi-rotor unmanned aerial vehicle depending on battery when it needs to fly longer and reduce the demand with two-cycle engine’s reliability.
Keywords:Multi-Rotor Unmanned Aerial Vehicle, Hybrid Dynamical System, Simulation Model, Fuel Consumption Characteristic, Two-Cycle Engine, Reliability

多旋翼UAV混合动力系统设计与性能分析
宗剑,王云,毛鞠盛
南昌航空大学飞行器工程学院,江西 南昌

收稿日期:2016年6月9日;录用日期:2016年6月26日;发布日期:2016年6月29日

摘 要
根据多旋翼无人飞行器现存的缺点和结构特点,为其提出一种油电混合动力系统。对提出的多旋翼无人飞行器混合动力系统进行设计,并使用MATLAB/Simulink软件建立混合动力系统仿真模型,最后进行仿真和性能分析。结果显示该混合动力系统比单台同型二冲程发动机在输出功率相同情况下具备更低的耗油特性,设计的混合动力系统具有较高的可靠性和无须人工充电优点,能够减少多旋翼无人飞行器长航时对电池的依赖和降低对二冲程发动机较高的可靠性要求。
关键词 :多旋翼无人飞行器,混合动力系统,仿真模型,耗油特性,二冲程发动机,可靠性

1. 引言
多旋翼无人飞行器(以下简称“多旋翼UAV”)因其具有起飞不限场地、能够实现定点悬停、低速前进和后退及侧飞、机械结构简单、操纵简单和成本低廉等优点,目前已广泛应用于无人航拍、地质勘察与测绘、农业监控及农药喷洒、城市公安与消防等众多领域。但从实际使用来看,我国市场多旋翼UAV性能还存在明显的不足,主要表现在:空中续航时间短,如市场主流植保多旋翼UAV载药量为15~30公斤,续航时间只有10~25 min,不仅电池充电时间长,作业能力底下,而且还具有可靠性差和坠机率高等缺点 [1] 。分析原因,多旋翼UAV性能表现不佳最为主要的原因是其动力系统技术发展受到了限制,直接原因是目前电池技术发展的制约和经济型微型油动发动机的可靠性比较低下。为了解决现有多旋翼UAV动力系统技术存在的难题,本文为多旋翼UAV提出一种混合动力系统,并对该混合动力系统进行设计和性能分析。
2. 多旋翼UAV混合动力系统
混合动力系统是指油动和电动通过某种方式组合在一起发挥某种优势性能的复合动力系统。目前,混合动力系统主要分为三类:串联式混合动力系统、并联式混合动力系统和混联式混合动力系统 [2] 。它们特点比较如表1所示。
混合动力系统安置在多旋翼UAV上,三种布置形式分别如图1~3所示。
依据目前多旋翼UAV所采用对称动力四周分散布置的结构特点,以及电动多旋翼UAV常因电池电量耗尽需对电池更换致使平凡增加多旋翼UAV起降次数而增加了坠机率、电池需要单独充电、电池航时短、以及油动UAV使用的二冲程活塞发动机耗油率高和可靠性低等缺点,结合三种混合动力特点,在目前的技术条件下,本多旋翼UAV混合动力系统设计采用混联式混合动力系统。该动力系统主要由一台发动机、减速传动装置、一台发电机、蓄电池、4组电动机、稳压整流设备和其它附件组成,多旋翼UAV混联混合动力系统总体图如图3所示。
3. 多旋翼UAV混合动力系统的设计
3.1. 多旋翼UAV混合动力系统的设计要求
1) 降低二冲程发动机油耗,减少多旋翼UAV长航时对电池的依赖性。

Table 1. Three kinds of hybrid system characteristics compare
表1. 三种混合动力系统特点比较

Figure 1. Overall picture of series connection hybrid dynamical system for multi-rotor UAV
图1. 多旋翼UAV串联混合动力系统总体图

Figure 2. Overall picture of parallel connection hybrid dynamical system for multi-rotor UAV
图2. 多旋翼UAV并联混合动力系统总体图
2) 不需要人工为电池充电。
3) 当该混合动力系统的发动机空中停车时,在一定时间范围内仅靠电动机提供的升力能够确保多旋翼UAV的安全着陆,提高多旋翼UAV发动机的可靠性和多旋翼UAV的抗坠毁能力。
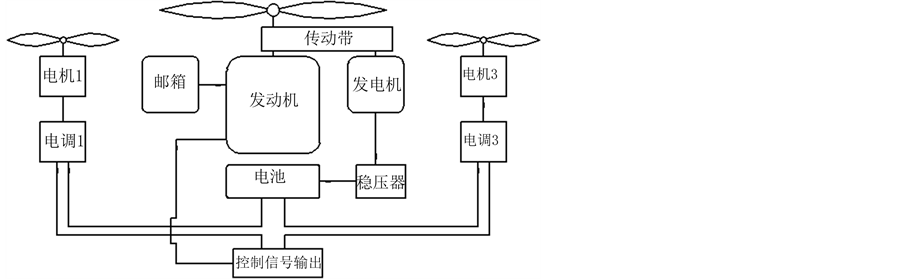
Figure 3. Overall picture of series parallel hybrid dynamical system for multi-rotor UAV
图3. 多旋翼UAV混联混合动力系统总体图
3.2. 多旋翼UAV混合动力系统设计计算
为了简化计算过程,不考虑稳压整流的能量损失,假定为理想的稳压整流器;不考虑电机电流控制器能量损失。采用模块法进行设计计算。
3.2.1. 发动机燃油消耗计算
发动机选用二冲程活塞汽油发动机,发动机燃油消耗计算公式 [3] :

式中,B为燃油消耗量cm3/h,b燃油消耗率g/w·h,P为输出功率w,d为燃油比重g/cm3。
3.2.2. 发电机和电动机模型
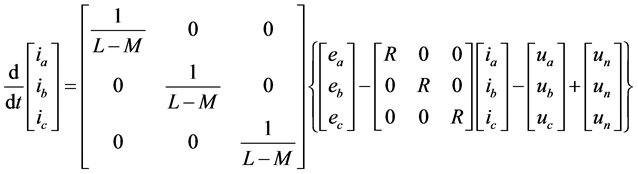
发电机选用星型连接绕组永磁发电机,电动机选用星型连接绕组永磁电动机,忽略发电机和电动机电刷影响,则永磁发电机和电动机状态方程如下 [4] :
式中,R为每相绕组电阻,M为每相绕组间互感,L为每相绕组自感, 、
、 、
、 为每相绕组相电流,
为每相绕组相电流, 、
、 、
、 为每相绕组相电压,
为每相绕组相电压, 、
、 、
、 为每相绕组反电动势。模型作为电动机时输入量为相电压,模型作为发电机时输入量为电机电压、角速度、位置角速度,输出为电流。
为每相绕组反电动势。模型作为电动机时输入量为相电压,模型作为发电机时输入量为电机电压、角速度、位置角速度,输出为电流。
3.2.3. 电池充电和放电模型
电池选用锂电池,电池充放电模型采用安培计时法有 [5] :

式中, 、
、 、
、 、
、 和
和 分别表示电池初始状态电荷、剩余电荷量、电池电量变化、额定电量和充放电效率。
分别表示电池初始状态电荷、剩余电荷量、电池电量变化、额定电量和充放电效率。
3.2.4. 减速传动系统
减速传动系统采用同步带减速传动,带轮材料采用铝合金制作,计算如下:

式中, 和
和 分别为发动机和发电机角速度,rad/s。
分别为发动机和发电机角速度,rad/s。
4. 多旋翼UAV混合动力系统仿真
4.1. 混合动力系统参数选择
多旋翼UAV混合动力系统选择如下表2所示。
4.2. 基于MATLAB/Simulink对混合动力系统仿真模型的建立
采用MATLAB/simulink软件对所设计的多旋翼UAV混合动力系统建立如下仿真模型,如图4所示。
4.3. 计算结果与分析
设定油箱容量为550 cm3,对建立的二冲程汽油活塞发动机Simulink模型进行仿真,仿真结果如图5所示。
根据二冲程汽油活塞发动机仿真曲线可知,该发动机高功率低油耗转速范围为8500~10500 r/min,取发动机转速为9500 r/min时,其耗油量为596.142 g/h,输出轴功率为1.701 KW,功耗比为2.853 W∙h/g,550 cm3燃油可以运行40 min。
选用4组大疆E800350 KV电动机和2对1345快拆桨进行组合,驱动电源为5500 mAH 6 S电池,进行电动机输入功率和气动拉力输出测试实验,实验测得结果如图6所示。
Table 2. Parameter list of multi-rotor UAV hybrid dynamical system
表2. 多旋翼UAV混合动力系统参数列表
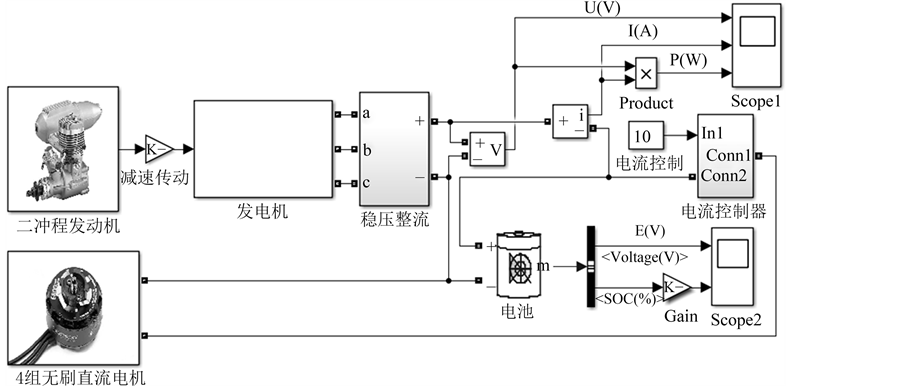
Figure 4. Simulation mode of hybrid dynamical system
图4. 混合动力系统仿真模型

Figure 5. Performance simulation result of two-cycle gasoline engine
图5. 二冲程汽油发动机性能仿真结果曲线
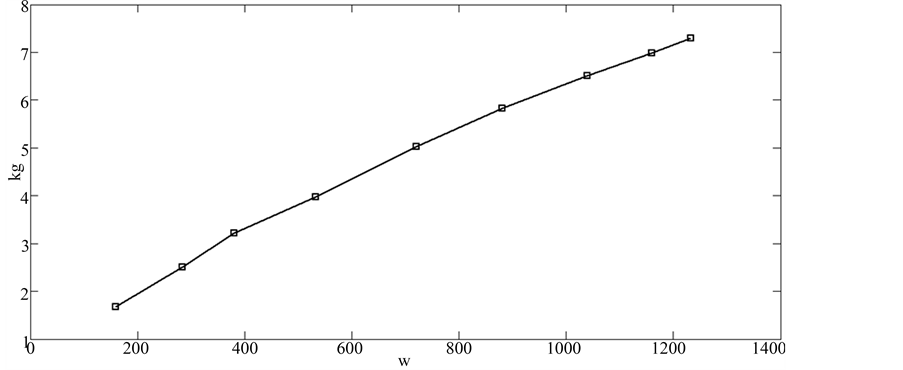
Figure 6. Test result of electric motor power input and pneumatic tension output
图6. 电动机输入功率与气动拉力输出测试结果曲线
实验数据显示,4组E800350 KV电动机和2对1345快拆桨组合,最大气动拉力为7.210 Kg,电流为50.0 A,电动机输入总功率为1.232 KW,350 W发电机电功率可以为该4组电动机提供约为3 Kg以内的升力。
设定发动机转速为9500 r/min,此时发动机功耗比为2.853 W∙h/g,经过传动比为1.5传动带减速传动,传动带和发电机效率分别为0.96和0.92,输入发电机转轴转速约为6333.3 r/min,通过整流和稳压,效率约为0.93,发电机共消耗发动机功率400 W,通过仿真计算出发电机发电性能参数曲线如图7所示。
从中可以得出,发动机在功耗比为2.853 W∙h/g情况下,发电机输出电压为为22.211 V,电流约为14.786 A,经整流和稳压输出电功率约为328.550 W,基本满足该混合动力选取的4组电动机中低功率情况下的用电需求。
为了延长多旋翼UAV锂电池使用寿命,设定每小块锂电池放电最低电压不得低于2.75 V,即5500 mAH6 S电池放电最低电压不得低于16.5 V;设定电池标准总电压为22.2 V,电池总容量为5500 mAH,放电电压不得低于16.5 V,对锂电池分别以恒流5 A、10 A、20 A、40 A、50 A进行放电仿真计算,结果如图8所示。
仿真数据显示,锂电池放电同时电池电压下降,电池为5 A恒流放电,放电时间超过1 h,但输出供

Figure 7. Simulation result of generator motor produce electricity after rectifier and voltage regulator
图7. 经整流和稳压后发电机发电仿真参数结果曲线
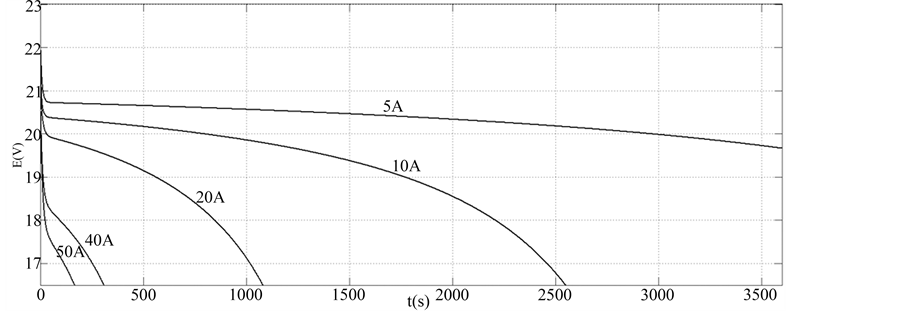
Figure 8. Simulation result of battery constant current discharge
图8. 电池恒流放电仿真结果曲线
给4组电动机功率较小;10 A恒流放电,时间为42.21 min;40 A恒流放电约为5 min;50 A放电时间过短,只有2.8 min。当发动机空中停车时,电池满电情况下,在6.5 Kg多旋翼UAV设计的总重量范围内,电池可为电动机提供2.8 min50 A电能,电动升力为7.210 Kg,可有足够反应和操控时间控制使多旋翼UAV安全降落,提高多旋翼UAV抗坠毁率。
发动机转速设定为9500 r/min时,直流无刷电动机平均机械效率为0.84,5500 mAH6 S电池对电动机组10 A额外供电,分别以单台二冲程活塞发动机和由该发动机组成的混合动力发动机进行模拟仿真,计算结果如图9所示。
仿真计算结果表明,在两种动力输出功率相同情况下,电池以10 A为电动机组额外供电的混合动力比单台同型二冲程活塞发动机功耗比平均提高16.165%。
综合所述,所设计多旋翼UAV混合动力系统,发动机转速为9500 r/min,二冲程活塞发动机输出总功率为1.701 KW,耗油量为596.142 g/h,活塞发动机功耗比为2.853 W∙h/g,其中1.301 KW驱动活塞发动机螺旋桨转动,400 W驱动发电机发电,此时550 cm3油箱可供该发动机工作约40 min,通过减速传动发电机输入转速6333.3 r/min,输出电压为22.211 V,发电机发电输出电功率为328.550 W。在电池不提供额外电能情况下,即4组电机输入功率可以达到328.550 W,电动升力最大可达到2.84 Kg。蓄电池在充满电能不充电情况下,额外为电动机组提供10 A电流,即5500 mAH 6 S电池可为电动机提供功率至少可达时间约为43.3 min功率在165 W以上的电功率,此时发动机和电池工作40 min电动机总输入功率可达493.550 W以上,混合动力总功率为1.795 KW以上,此时混合动力功耗比为3.011 W∙h/g,单独二冲程发动机在输出功率为1.795 KW时耗油量为692.432 g/h,功耗比为2.592 W∙h/g,混合动力和单独二冲程发动机在相同输出功率1.795 KW情况下,混合动力比单独二冲程发动机功耗比提高16.165%,整体提高燃油经济性。该混合动力短时间工作最大输出功率可达2.890 KW。发动机空中停车情况下,多旋翼UAV总重量在设定范围内,5500 mAH 6 S电池满电可以为电动机组提供约2.8 min 50 A电流,电动升力达7.210 Kg,可为多旋翼UAV降落提供足够得反应和操纵时间,提高多旋翼UAV发动机的可靠性。飞行过程中当电动机输入功率低于328.550 W时,发电余功可为电池充电。
5. 结论
设计的多旋翼UAV混合动力具有以下特点:
1) 550 cm3油箱容量时,调节二冲程发动机转速为9500 r/min较低耗油率情况下,电池可提供额外

Figure 9. Simulation result of two kinds of engine’s fuel consumption
图9. 两种动力油耗仿真结果曲线
10 A长航时低电流为电动机组供电,此时混合动力总功率达到1.795 KW,混合动力燃油功耗比为3.011 W∙h/g,等效同样二冲程发动机以相同输出功率工作功耗比为2.592 W∙h/g,混合动力比单独二冲程发动机功耗比提高16.165%,即混合动力比单独二冲程发动机具有更低油耗特性,降低长航时对电池的依赖性。
2) 发动机空中停车时,电池满电可以为电机组提供约2.8 min 50 A电流,可为多旋翼UAV降落提供反应和操纵降落时间,提高发动机可靠性和飞行器的抗坠毁率。
3) 电动机输入功率小于发电机功率时,余额功率可以为电池充电,无须人工充电或补充电池燃料。
基金项目
国家自然科学基金《水空两栖飞行器动力推进系统及其关键技术研究》资助,基金号:51266012。
文章引用
宗 剑,王 云,毛鞠盛. 多旋翼UAV混合动力系统设计与性能分析
The Design and Performance Analysis of Hybrid Dynamical System with Multil-Rotor UAV[J]. 国际航空航天科学, 2016, 04(02): 25-33. http://dx.doi.org/10.12677/JAST.2016.42004
参考文献 (References)
- 1. 杨益军. 植保无人机飞入千亿市场蓝海可期[J]. 中国农药, 2015(12): 48-55.
- 2. Hung, J.Y. and Gonzalez, L.F. (2012) On Parallal Hybrid-Electic Propusion System for Unmanned Aerial Verial Vehicles. Progress in Aerospace Science, 51, 1-17. http://dx.doi.org/10.1016/j.paerosci.2011.12.001
- 3. 周宝龙, 刘忠长, 高宗英. 内燃机学[M]. 北京: 机械工业出版社, 2010: 67-72.
- 4. 吴影生. 永磁无刷直流电机起动/发电系统研究[M]. 南京: 东南大学, 2004: 17-25.
- 5. 陈根, 程启明, 李明, 等.电动汽车中锂电池两种建模方式的分析与比较[J]. 电源技术, 2014(11): 2051-2054.