Journal of Aerospace Science and Technology
Vol.05 No.03(2017), Article ID:21576,7
pages
10.12677/JAST.2017.53015
Quadrotor Track Control Based on Single Neuron PID Controller
Lin Luo, Zhongzhi Li
Chengdu University of Information Technology, Chengdu Sichuan

Received: Jul. 18th, 2017; accepted: Jul. 30th, 2017; published: Aug. 2nd, 2017

ABSTRACT
Quadrotor is from initial point flying to target point smoothly, keeping hovering motion. In order to control the stability of flying, the mathematical model and the dynamic model are established firstly. On the basis, the single neuron PID controller is designed. According to the characteristics of the dynamic model, acceleration is analyzed to track path so as to achieve the stability of flight. The establishment of model and the simulation experiment of model are based on Matlab/Simulink platform, and the result of simulation proves the practicability of this method.
Keywords:Quadrotor, Single Neuron PID Controller, Acceleration, Tracking Path
基于单神经元PID控制器的四旋翼飞行器 航迹控制
罗林,李中志
成都信息工程大学,四川 成都
收稿日期:2017年7月18日;录用日期:2017年7月30日;发布日期:2017年8月2日

摘 要
四旋翼飞行器从起点平滑旋进飞向终点,为控制飞行器稳定飞行,首先建立数学模型和运动力学模型,在此基础上设计双闭环单神经元PID控制器,并根据其动力学特性分析加速度对航迹跟踪,使飞行器飞行轨迹稳定。模型的建立与仿真实验都采用Matlab/Simulink平台,仿真结果证实此方法的可行性。
关键词 :四旋翼无人飞行器,单神经元PID控制器,加速度,航迹跟踪

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着计算机技术和智能控制技术的不断发展,四旋翼飞行器因其结构简单、垂直起降和低速飞行等诸多优点,在越来越多的领域拥有广泛的应用前景。四旋翼飞行器是由4个电动桨叶组成,相邻桨叶旋转相反方向抵消扭矩。它既可以使用无线电遥控设备进行手动飞行,也可以使用远程计算机与导航设备控制进行飞行。与传统的飞行器相比,具有负载能力强、机械操作简单和作业范围广泛等优点。四旋翼飞行器采用点到点的飞行方式,包括旋进、悬停、偏航、横滚、俯仰、垂直和水平飞行。在军用和民用领域都得到广泛的应用。在军用方面主要进行侦查、监视、获取敌方情报和地面通讯等工作;在民用方面主要进行空中摄影、图像传输、交通监控、电力巡检和大气检测等工作。
目前,对于四旋翼飞行器的控制器选择,通常采用PID控制器。PID控制器作为经典的反馈控制,其有设计简单、鲁棒性强和稳定性高等优点,被应用于各种各样的生产环境。但自适应性和参数整定方面表现很差,也限制算法的发展。丁军,姚乐和杨启文等 [1] [2] [3] 采用单神经元对PID算法做出改进,并分析改进后算法的合理性。侯一民,高京都等 [4] [5] 将改进后的算法应用于实际应用中。本文采用牛顿欧拉公式建立简化的数学模型,并根据飞行器运动合力与单神经元整定PID控制器结合对加速度控制,建立姿态控制、位置控制的双闭环控制系统,实现对飞行器运动跟踪及预测,并通过simulink仿真实验,论证算法的实时性、准确性。
2. 数学模型
四旋翼飞行器是一个强耦合、非线性的欠驱动的系统,在建立数学模型之前,需要做如下假设 [6] :
1) 机体结构完全对称,采用刚体材料;
2) 忽略地面效应对机体的影响;
3) 机体的质心与机体坐标原点重合。
地面坐标系 ,,机体坐标系
,,机体坐标系 ,姿态角
,姿态角 ,其中
,其中 为绕机体
为绕机体 轴转动的俯仰角,
轴转动的俯仰角, ,
, 为绕机体
为绕机体 轴转动的横滚角,
轴转动的横滚角, ,
, 为绕机体
为绕机体 轴转动的偏航角,
轴转动的偏航角, ,如图1所示。
,如图1所示。
绕 轴旋转矩阵
轴旋转矩阵
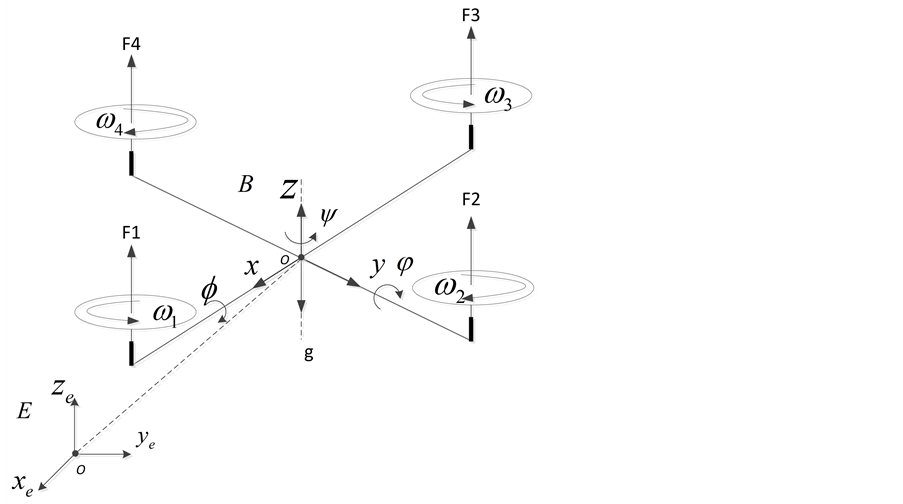
Figure 1. Mathematical modeling of quadrotor
图1. 四旋翼飞行器数学建模示意图
绕 轴旋转矩阵
轴旋转矩阵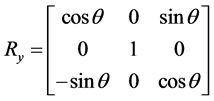
绕 轴旋转矩阵
轴旋转矩阵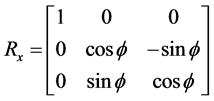
从机体坐标系到地面坐标系的旋转矩阵:

式中 。
。
3. 单神经元PID控制的设计
四旋翼飞行器是一个非线性系统,通过改变四个电机的转速控制飞行器的运动,机体在三维空间中的旋进运动是改变姿态角使机身俯仰、横滚或偏航提供方向和加速度,然后保持姿态角飞行器平移运动。所以在飞行控制器的设计中,首先需要计算出姿态角的大小,飞行器才能旋进运动,通常采用双闭环PID飞行控制器 [7] 。传统的PID控制器结构简单,容易实现,但自适应性不佳,收敛速度慢等缺点。单神经元PID控制器是单层网络,其计算量小、具有逼近函数的能力,弥补传统PID控制器的不足,对四旋翼飞行控制器是理想选择。
从图2可以看出,在双闭环控制器中,内环为姿态控制,外环为位置控制。当飞行控制器接收到给定的期望加速度,外环控制需要计算出飞行器需要改变姿态角,根据姿态角的变化控制飞行器飞行。内环控的输入值由外环计算出的姿态角,输出值为4个电机的转速控制飞行器的运动状态。
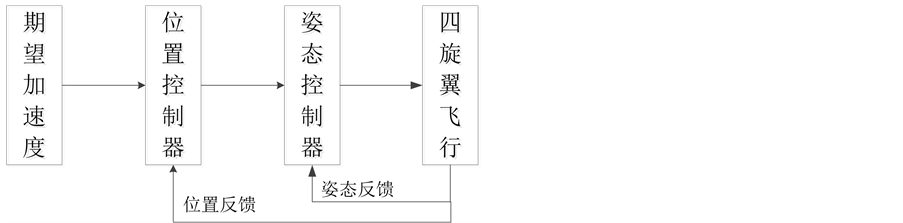
Figure 2. Controller structure diagram
图2. 控制器结构示意图
3.1. 姿态控制
飞行器在飞行过程中需要实时精确控制飞行姿态,通过机身坐标系检测飞行器在 轴上角度和角速度,然后对飞行器姿态采用内环控制,使飞行器到达期望的姿态角。
轴上角度和角速度,然后对飞行器姿态采用内环控制,使飞行器到达期望的姿态角。
假设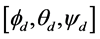 为期望姿态角,
为期望姿态角, 为机身传感器采集的姿态角数据,如陀螺仪和加速度计联合测量的机身当前的姿态角。两者的偏差
为机身传感器采集的姿态角数据,如陀螺仪和加速度计联合测量的机身当前的姿态角。两者的偏差 作为内环PID控制器的输入,内环PID控制器输出信号为
作为内环PID控制器的输入,内环PID控制器输出信号为 。
。
 (1)
(1)
式中, 为
为 轴上比例、积分和微分的控制参数。
轴上比例、积分和微分的控制参数。
3.2. 位置控制
四旋翼飞行器飞行任务由任务规划、路径规划和姿态控制组成。飞行器在空中悬停,当俯仰或横滚获得一个偏航角产生加速度时,飞行器由初始点进行旋进运动匀速飞向目标点。要使飞行器保持匀速飞行,必须进行姿态控制使当前姿态角快速收敛于目标姿态角。
假设目标点坐标为 ,飞行器当前的位置坐标
,飞行器当前的位置坐标 ,可通过GPS和气压计计算出(GPS计算出经度和纬度的是地里坐标系,转换到欧拉坐标系为
,可通过GPS和气压计计算出(GPS计算出经度和纬度的是地里坐标系,转换到欧拉坐标系为 轴,气压计算出高度为
轴,气压计算出高度为 轴)。飞行器在悬停后以加速度
轴)。飞行器在悬停后以加速度 向目标坐标点飞行,改变1个电机的转速提供合适的升力,其余三个电机的转速保持悬停时转速一致。忽略空气阻力的影响,升力分解为:
向目标坐标点飞行,改变1个电机的转速提供合适的升力,其余三个电机的转速保持悬停时转速一致。忽略空气阻力的影响,升力分解为:
 (2)
(2)
式中, 为升力,
为升力, 为偏航角。
为偏航角。
将公式(2)化简得:
 (3)
(3)
当自动由起点由稳定加速度飞行目标点时,可以计算出偏航角
 (4)
(4)
通过偏航角的大小计算出点击需要的转速,以控制它需要的升力。
3.3. 单神经元PID控制器
单神经元PID控制器是将神经网络与传统的PID控制相结合产生一种改进控制方法,具有自适应、自组织功能等特点 [8] ,能较大改善经典非线性动态对象的运动变化,能够适应复杂环境中过程变化的时变特性,保证控制系统在最佳的状态下运行。其控制原理如图3所示。
图3中,状态变换器的输入反映被控对象的控制设定状态。设 为设定值,
为设定值, 为输出值,经过状态变换器转换成神经元的输
为输出值,经过状态变换器转换成神经元的输 分别为
分别为
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
单神经元PID的控制算法为:
 (9)
(9)
式中, 为对应
为对应 输入的加权系数,
输入的加权系数, 为神经元的比例系数,
为神经元的比例系数, 的大小决定系统的收敛速度,过大使系统的超调量加大引起不稳定,过小使收敛速度慢,因此
的大小决定系统的收敛速度,过大使系统的超调量加大引起不稳定,过小使收敛速度慢,因此 取值适中。
取值适中。 为函数
为函数 的阀值。
的阀值。
根据(7)~(10)可知,式(8)具有按偏差的比例、积分和微分的输入值,故 可以作为增量式PID的比例、积分和微分的系数:
可以作为增量式PID的比例、积分和微分的系数:
 (10)
(10)
式中, 分别表示比例、积分和微分的学习速率。
分别表示比例、积分和微分的学习速率。
4. 实验结果及分析
使用MATLAB的simulink模块根据以上的四旋翼飞行器的运动模型及其控制器,通过双闭环单神经元PID控制器控制四旋翼飞行器飞行,假设飞行器由悬停运动起飞至目标点。起点设为(0, 0, 1),沿x轴正方向以0.3 m/s匀速速度飞行,通过仿真可得其飞行轨迹曲线和姿态曲线(图4~图6)。

Figure 3. The principle of control of single neuron PID
图3. 单神经元PID的控制原理

Figure 4. Velocity changing curve
图4. 速度变化曲线
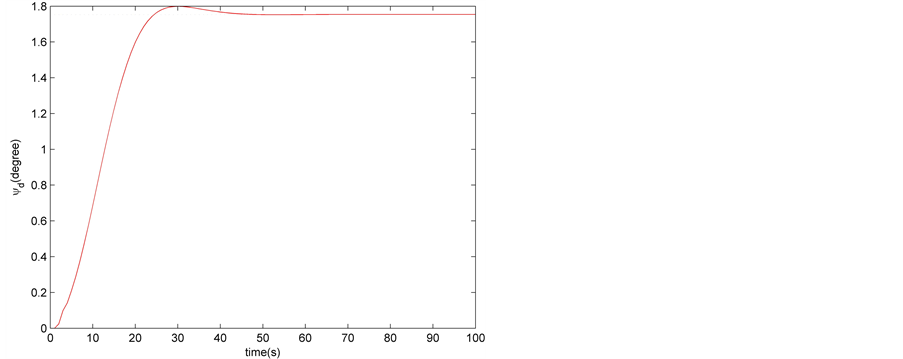
Figure 5. Yaw angle changing curve
图5. 偏航角 的变化
的变化

Figure 6. Quadrotor changing path
图6. 飞行器轨迹变化
5. 总结
本文针对四旋翼无人飞行器数学建模、位置控制和姿态控制进行详细分析,提出将单神经元PID控制器与外环位置控制和内环姿态控制相结合,使飞行器手动整定参数变为自动整定参数,提升系统的鲁棒性,并通过仿真证实此方法可行。
文章引用
罗 林,李中志. 基于单神经元PID控制器的四旋翼飞行器航迹控制
Quadrotor Track Control Based on Single Neuron PID Controller[J]. 国际航空航天科学, 2017, 05(03): 136-142. http://dx.doi.org/10.12677/JAST.2017.53015
参考文献 (References)
- 1. 丁军, 徐用懋. 单神经元自适应PID控制器及其应用[J]. 控制工程, 2004, 11(1): 27-30.
- 2. 姚乐, 管业鹏, 金星. 基于改进单神经元的四旋翼PID控制器设计[J]. 计算机测量与控制, 2016, 24(4): 68-70.
- 3. 杨启文, 陈昊, 薛云灿. 单参数PID的Hebb学习控制[J]. 仪器仪表学报, 2008, 29(2): 392-395.
- 4. 侯一民, 朱志超. 单神经元PID控制算法在智能车控制系统的应用[J]. 化工自动化及仪表, 2015(2): 134-138.
- 5. 高京都. 四旋翼飞行器控制系统的设计与实现[D]: [硕士学位论文]. 大连: 大连理工大学, 2015.
- 6. Rodić, A. and Mester, G. (2011) Modeling and Simulation of Quad-Rotor Dynamics and Spatial Navigation. 2011 IEEE 9th International Symposium on Intelligent Systems and Informatics (SISY), Sydney, 26-29 July 2011, 23-28.
- 7. 张镭, 李浩. 四旋翼飞行器模糊PID姿态控制[J]. 计算机仿真, 2014, 31(8): 73-77.
- 8. 孔超波, 周武能. 基于单神经元PID控制器的无线液位控制系统[J]. 控制工程, 2015, 22(4): 690-695.