Instrumentation and Equipments
Vol.04 No.03(2016), Article ID:18600,10
pages
10.12677/IaE.2016.43006
Modeling and Dynamic Simulation of U-Type Slide Constrained Conveyor Based on Recurdyn
Weidong Yang1, Lin Hong2*, Yanshu Liang2
1School of Mechanical Engineering, Tianjin University of Technology, Tianjin
2School of Mechanical Engineering, Tianjin University of Commerce, Tianjin

Received: Sep. 2nd, 2016; accepted: Sep. 20th, 2016; published: Sep. 23rd, 2016
Copyright © 2016 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
For a special kind of slow-speed overloading transmission chain—U-type slide constrained conveyor. Modeling based on UG and dynamic simulation based on RecurDyn. As the existence of polygon effect in chain drive, by imposed slide constraint in this paper, it’s verified the effects to velocity and acceleration of the driven sprocket and chain, when driver sprocket is with maximum rotational speed under the specified conditions, and the chain is with different number of load and the load is in different position. When the chain is with a different number of load and the load is in a different position, the changes of the contact force caused by collision between the chain and slide with inside or outside, and the change collision load caused by meshing between the pin roll and sprocket, provided the theoretical basis for the design of similar mechanism.
Keywords:U-Type Slide Constrained Conveyor, Contact Force, Dynamic Simulation, RecurDyn

基于RecurDyn的U型滑道约束型输送链建模及动力学仿真
杨卫东1,洪林2*,梁艳书2
1天津理工大学机械工程学院,天津
2天津商业大学机械工程学院,天津

收稿日期:2016年9月2日;录用日期:2016年9月20日;发布日期:2016年9月23日

摘 要
针对一种特殊工况下的低速重载输送链—U型滑道约束输送链。基于UG建模和Recur Dyn动力学仿真。由于链传动多边形效应的存在,本文通过施加滑道约束,验证了当主动链轮在规定条件下以最大速度转动,链节携带不同数量负载,负载处于不同位置时,从动链轮、链节运动速度、加速度的影响。链节携带不同数量负载,负载处于不同位置时,链节与内外滑道的冲击碰撞产生的接触力情况,销轴与链轮啮合产生的冲击碰撞载荷变化情况,为同类机构的设计提供理论依据。
关键词 :U型滑道约束输送链,接触力,动力学仿真,RecurDyn

1. 引言
链传动作为机械传动中的一种重要的运动传递方式,因其经济、可靠及良好的传动性能而广泛应用于运输、采矿、冶金、军事等各种机械传动系统中 [1] 。对用于低速重载输送机一类装备的链传动,重载的链节易产生较大的拉应力,不允许链条松边的存在 [2] 。由于链传动多边形效应的存在,当主动链轮在规定条件下以最大速度转动时,会对从动链轮,链节的速度、加速度产生了影响。本文运用滑道来约束链节的运动轨迹,对不同数量负载状况下的输送链进行建模及动力学仿真。以获得链节与内外滑道之间相互作用的接触碰撞力,销轴与链轮啮合产生的冲击碰撞载荷特性。
2. U型滑道约束输送链的力特性分析
2.1. 静载荷分析
根据U型滑道约束输送链系统平衡状态,忽略过渡圆弧的轨迹变化。如图1所示;U型滑道上共有16个链节,右侧链轮为驱动链轮,左侧链轮为从动轮,两链轮的分度圆半径相等。
模型在静止状态下,链条的受力与单个链节在滑道内的位置,携带的负载数量,负载在链节的位置有关。所以确定链节在滑道上的位置对链节、滑道、链轮的受力是非常关键的。
内滑道上链节位置。在如图1所示的位置下,设链节 中心与竖直方向的距离为
中心与竖直方向的距离为 ,内滑道上销轴到圆心的距离为
,内滑道上销轴到圆心的距离为 ,链节
,链节 与竖直方向的夹角为
与竖直方向的夹角为 ,表示为:
,表示为:
 (1)
(1)
在内滑道内任意链节可表示为:
 (2)
(2)
链节 ,
, ,
, ,
, 与竖直方向的夹角
与竖直方向的夹角 :
:
 (3)
(3)
式中 。同理,设链节
。同理,设链节 中心与竖直方向的距离为
中心与竖直方向的距离为 ,链节
,链节 与竖直方向的夹角为
与竖直方向的夹角为 ,外滑道上销轴到圆心的距离为
,外滑道上销轴到圆心的距离为 ,则有:
,则有:
 (4)
(4)
 (5)
(5)
链节 ,
, ,
, ,
, ,
, ,
, 与竖直方向的夹角
与竖直方向的夹角 :
:
 (其中)(6)
(其中)(6)
2.2. 动载荷分析
U型滑道约束输送链存在多种动载荷。此系统的链条由滑道约束,故其动载荷主要由多边形效应引起的惯性载荷、链节在运动过程中受到滑道约束的冲击、销轴与链轮啮合时产生的冲击载荷,链节携带的负载数量,负载在链节中的不同位置等组成。假设链节携带的负载数量及负载所在的初始位置为已知输入条件。所以对链节在运动过程中与滑道的接触力、销轴与链轮啮合接触力的研究是非常重要的。
2.3. 接触问题求解现状
接触力在求解时,是以单向约束的问题为理论模型,用弹塑性理论来分析计算的。在发生接触的状态下,根据设定的接触刚度,以及产生的基础穿透深度来计算接触力及相关的摩擦力 [3] 。
分析系统构件在发生接触时,RecurDyn计算接触力是基于Hertz接触理论,计算基础产生的法向接触力 的公式为:
的公式为:

Figure 1. Diagram of the conveyor chain
图1. 输送链示意图
 (7)
(7)
式中, 为接触刚度系数;
为接触刚度系数; 为阻尼系数;
为阻尼系数; 为接触穿透深度;
为接触穿透深度; 为接触穿透深度的导数(接触点的相对速度);
为接触穿透深度的导数(接触点的相对速度); 、
、 、
、 分别为刚度指数、阻尼指数、凹痕指数。
分别为刚度指数、阻尼指数、凹痕指数。
3. U型滑道约束型输送链动力学建模
3.1. 模型的建立及装配
U型滑道约束输送链模型的装配:建立一个装配体模型,载入底板、链节等,在链节部件销轴中心点与底板运动轨迹线之间添加点在线上副约束 [4] 。销轴与链轮之间添加3D约束(3D约束为碰撞接触约束,链轮和销轴碰撞时进行能量和运动的传递)。图2为链节装配结构。
3.2. 模型的简化及约束
将UG环境下建立的三维模型通过公共文件接口导入RecurDyn中。为了提高计算的效率,对模型进行简化 [5] 。RecurDyn提供了面求和功能。把两销轴圆柱面求为一体。同理把两侧内、外滑道对应部分,两端链轮,负载仓、轴承、链节板合并求和。在实际中轴承与滑道之间的摩擦鉴于滚动和滑动摩擦之间,把其简化成滑动摩擦。
在RecurDyn中提供了面面接触和扩展面—面接触约束。根据模型的要求采用扩展面—面接触约束,不仅能够提高模型的计算精度,而且有利于模型的仿真分析。
4. 机构仿真结构及分析
U型滑道约束链传动系统用于实现负载运输。链节将物品由一个位置送到预期的位置后定位停止,以便其他装备完成对该物品的卸载。模型中含有四种不同的负载,四种负载根据需要进行随机的调配,而且要求每5.5 s内,调取所需的负载。链轮要完成加速,匀速,减速三个过程的运动。假设链轮加速,减速运动的时间分别为0.5 s,匀速运动的时间为4.5 s。
根据要求,当连续两次调动相同的负载时,链轮需要在规定的时间内要转过四个链节,此时链轮,销轴,滑道受到的多边形效应及冲击载荷为最显著,所以对链节转过四个链节的情况进行仿真。
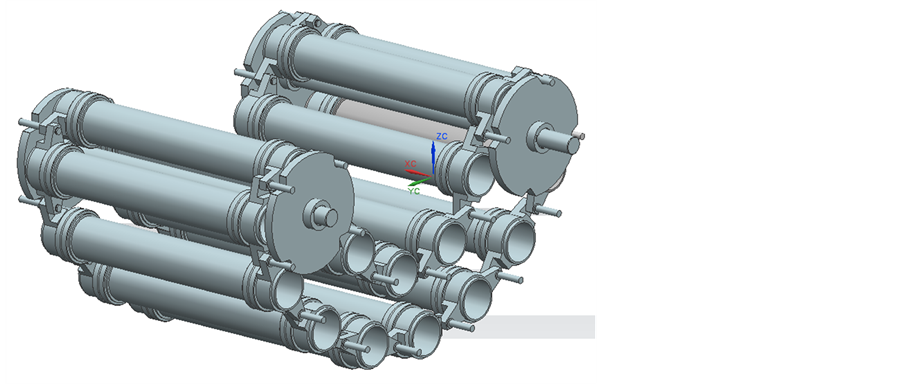
Figure 2. General assembly of chains
图2. 链节装配结构
主动轮的驱动采用RecurDyn中的step函数。step函数采用三次多项式逼近海赛阶跃函数。step函数的形式为:
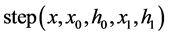
step函数中, 为自变量;
为自变量; 为起点自变量值;
为起点自变量值; 为阶跃起点处的函数值;
为阶跃起点处的函数值; 为阶跃终点自变量的值;
为阶跃终点自变量的值; 为阶跃终点的函数值。
为阶跃终点的函数值。
所以本模型中主动链轮上驱动函数为step (time,0,0,0.5,1.256) + step (time,5,0,5.5,-1.256)。
图3为模型在满负载和极限负载下的情况:满负载16个链节全部携带负载。极限负载模型,只有下滑道左侧5个链节和上滑道右侧3个链节携带负载。
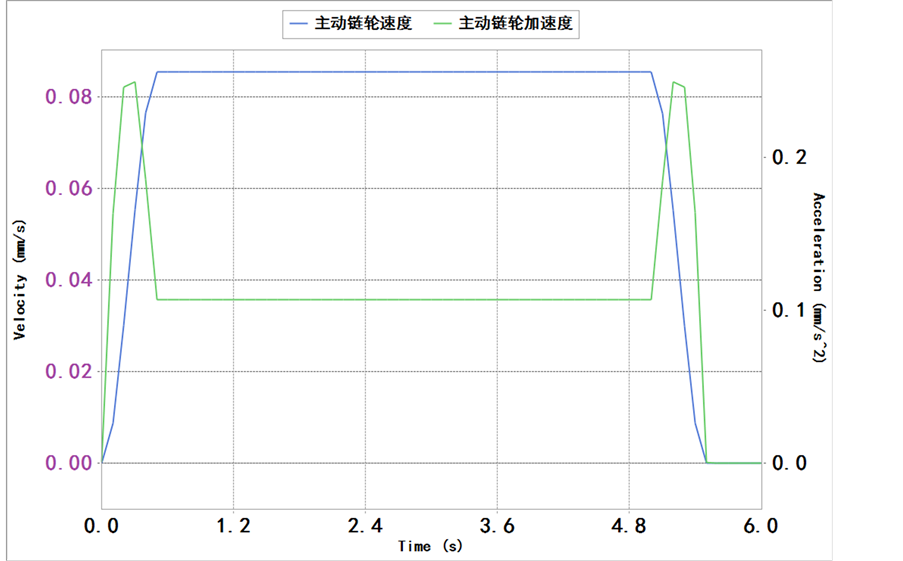
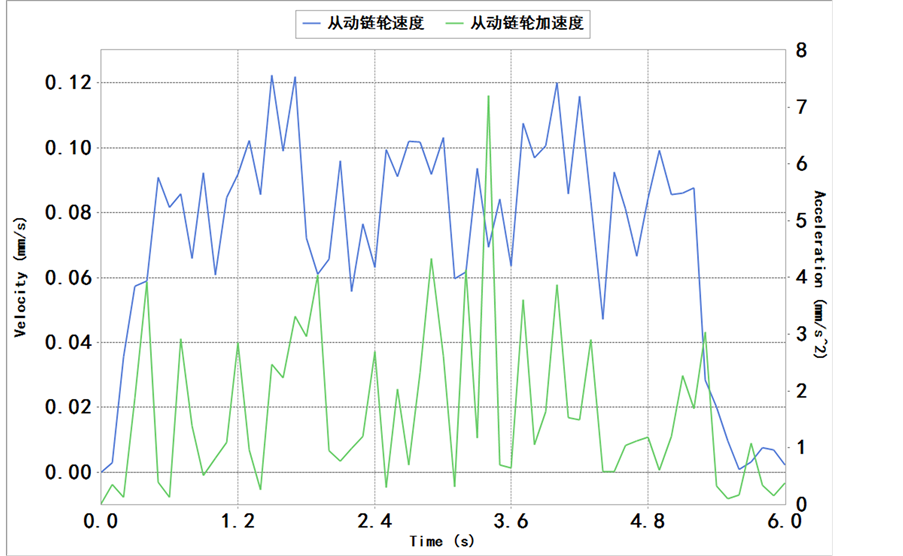
4.1. 当主动链轮以规定速度转动时,链节在携带不同负载情况下,从动链轮的速度、加速度变化
从图4主、从动链轮速度、加速度的比较可知,由于链传动多边形效应的存在,当主动链轮匀速转动时,在满负载情况下,从动链轮的速度在平均速度上下近似于正弦曲线运动,但是在极限负载情况下,其运动规律不是很明显,速度的上下波动非常明显,所以加速度曲线也明显波动。说明链节携带不同负载及负载处于不同位置对从动链轮的速度、加速产生一定的影响。

Figure 3. Chain with different load
图3. 链节携带不同负载
 (a)
(a)
 (b)
(b) (c)
(c)
Figure 4. Velocity and acceleration of the drive and passive sprocket; (a) Velocity and acceleration of sprocket; (b) Velocity and acceleration of driven sprocket with full load; (c) Velocity and acceleration of sprocket with limit load
图4. 主,从动链轮速度、加速度;(a) 主动链轮的速度、加速度;(b) 满负载下,从动链轮速度、加速度;(c) 极限负载下,从动轮速度、加速度
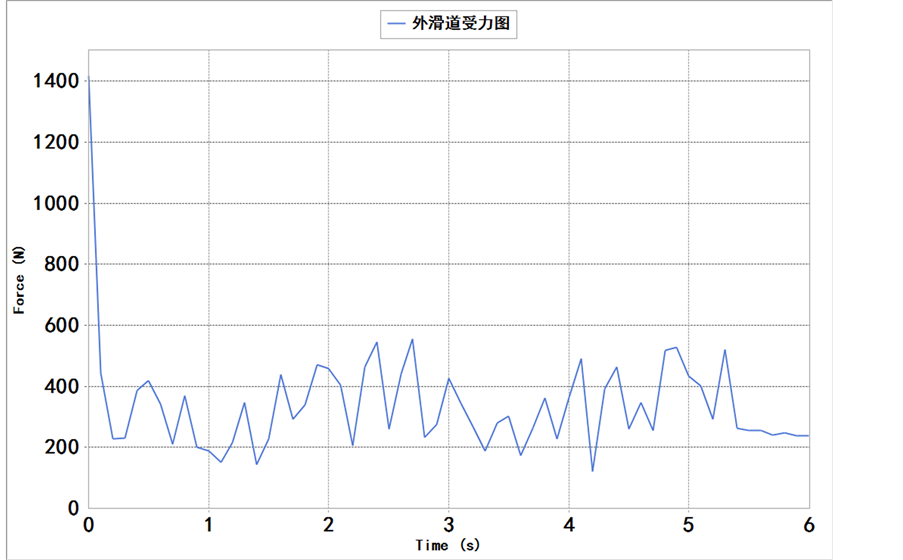
4.2. 任意链节与内、外滑道之间的接触力
从图5任意链节与内、外滑道之间的接触力比较可知,在满负载情况下,在启始加速阶段内滑道受力达到最大,在匀速运动阶段,内滑道的受力在上下波动,但是其均值基本稳定在500 N左右,最大值为730 N。在极限负载情况下,内滑道的受力出现一个明显的峰值,峰值力大约为2400 N。对外滑道的接触受力,
 (a)
(a)
 (b)
(b)
Figure 5. The contact force between the chain and slide; (a) Condition with full load; (b) Condition with limit load
图5. 任意链节与内、外滑道之间的接触力;(a) 满负载情况;(b) 极限负载情况
在满负载下,开始所受的力最大,经分析为在起始阶段,重载低速输送链的爬行现象。在稳定运行阶段,外滑道接触受力基本在300 N左右。在极限负载情况下,在某一阶段内,会出现受力峰值,经分析链节处在外滑道的最低点。在载荷相同的情况,内滑道的受力一般大于外轨道的受力,可得与滑道的曲率半径有关,曲率半径越小,链节在转动过程中速度改变越快,单位时间内受到的滑道接触碰撞力也就越显著。
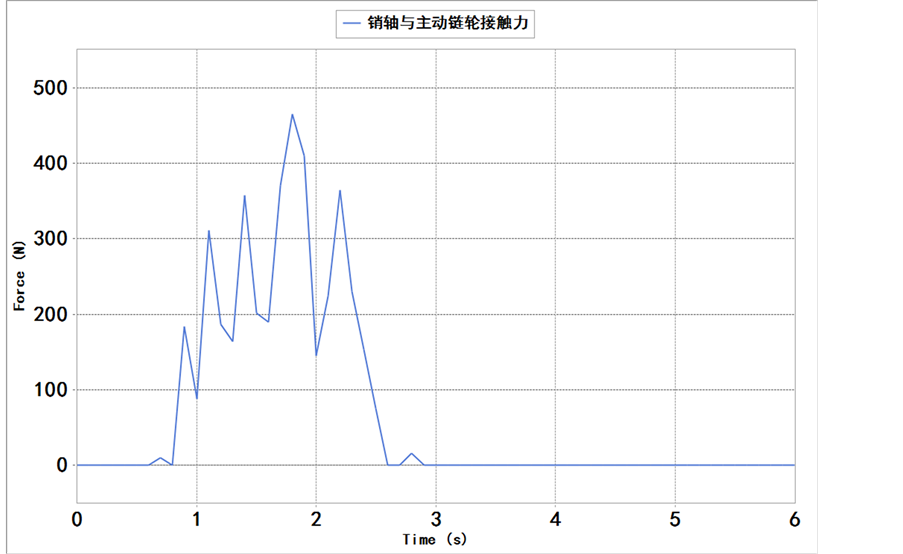
4.3.销轴与主动链轮接触时的受力
图6显示,链节在满负载情况下运动时,销轴与主动链轮的接触力在短时间内的均值,近似为正弦
 (a)
(a)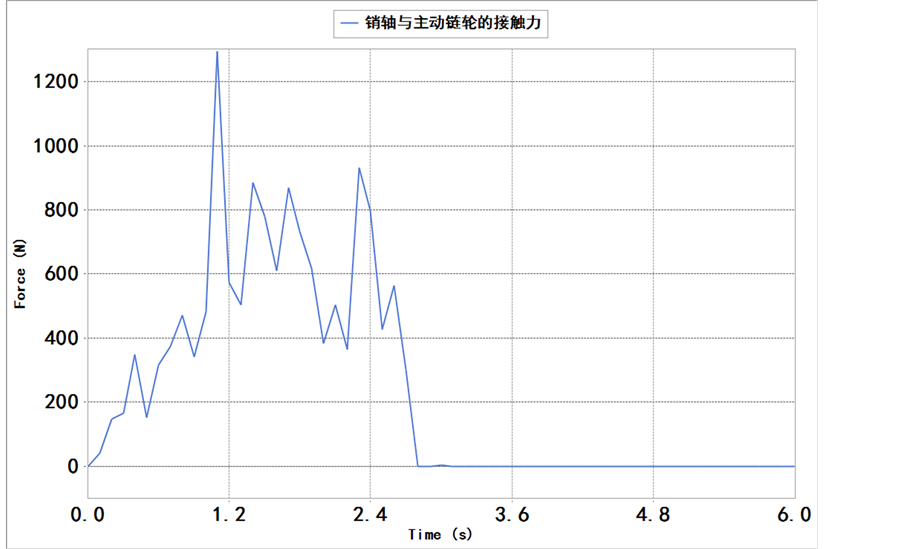 (b)
(b)
Figure 6. Pin and drive sprocket contact force; (a) Condition with full load; (b) Condition with limit load
图6. 销轴与主动链轮接触受力;(a) 满负载情况;(b) 极限负载情况
曲线。销轴与链轮的啮合:随着主动链轮的转动,受力间歇性的增长,而后再衰退。在极限负载情况下,其受力会出现突然的剧变,分析为负载的不平衡而导致的,而后又在700 N左右上下波动。
5. 结论
通过链节携带不同数量的负载及处在不同位置时,对内外滑道的受力分析,首先可知内外滑道的最大受力,为滑道尺寸的优化提供理论依据。其次,对从动链轮的运动特性分析,为传动过程中减少链传动的多边形效应提供依据。得出机构在运动中,应该尽快的补足负载,减小动载荷。通过对销轴与主动链轮接触的受力分析,为销轴的材料选择和尺寸优化提供依据。
基金项目
天津市应用基础与前言技术研究计划(13JCZDJC34100)。
文章引用
杨卫东,洪林,梁艳书. 基于RecurDyn的U型滑道约束型输送链建模及动力学仿真
Modeling and Dynamic Simulation of U-Type Slide Constrained Conveyor Based on Recurdyn[J]. 仪器与设备, 2016, 04(03): 35-44. http://dx.doi.org/10.12677/IaE.2016.43006
参考文献 (References)
- 1. 李晓, 洪林, 李德胜. 链传动多边形效应的一种补偿方法[J]. 天津理工大学学报, 2008, 24(1): 11-13.
- 2. Liu, W.H. and Gao, Y.B. (2011) Compensation of Variable Pitch Roller Chains for the Polygon Effect. International Conference on Electronic &Mechanical Engineering and Information Technology, Harbin, 12-14 August 2011, 2900-2903. http://dx.doi.org/10.1109/emeit.2011.6023654
- 3. 蒲明辉, 吴江. 基于ADAMS的链传动多提动力学模型研究[J]. 机械设计与研究, 2008, 24(2): 57-59.
- 4. 李英杰, 洪林. 基于SolidWorks的输送链三维造型及运动仿真的实现[J]. 机械传动, 2014, 38(9): 73-75.
- 5. 闫鹏程, 郝驰宇, 孙华刚, 等. 基于RecurDyn的开式链传动输弹机动力学联合仿真研究[J]. 火炮发射与控制学报, 2015, 36(2): 31-35.