Instrumentation and Equipments
Vol.05 No.03(2017), Article ID:21960,8
pages
10.12677/IaE.2017.53009
The Design of Non Differential Tricycle without Deviation
Lixue Wang1, Chunyi Zhang1*, Weiwei Wang1,2, Peng Sun1,3, Lei Sun1,4
1School of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin Heilongjiang
2China Aviation Optical-Electrical Technology Co., Ltd., Luoyang Henan
3Hit Robot Group China Intelligence Equipment Co., Ltd., Harbin Heilongjiang
4AECC Harbin Dongan Engine Co., Ltd., Harbin Heilongjiang

Received: Aug. 16th, 2017; accepted: Sep. 2nd, 2017; published: Sep. 7th, 2017

ABSTRACT
In order to overcome the existing problems that tricycle steers deviated and turns stiffly, we put forward the design idea of realizing double wheel drive of tricycle by ratchet wheel mechanism based on the analysis of the principle of the single wheel drive of the original tricycle. An inner ratchet wheel is respectively arranged on the inner wheels of the two rear wheels of the tricycle. When the movement is transmitted from the sprocket to the rear axle, the inner ratchet wheel installed on the two rear wheels rotates together with the rear axle, and the two rear wheels are driven to rotate at the same time to achieve the purpose of simultaneous drive. When the tricycle turns, the brake makes a rear wheel stop rotating. The wheel turns slow or stops and realizes the turn so as to move forward without deflection. The experiment shows that this kind of improvement is not only safe, reliable, convenient and reasonable, but also has high promotion value and the prospect of market application.
Keywords:Tricycle, Non Differential, Dual Wheel Drive
无差速器无跑偏三轮车设计
王丽雪1,张春宜1*,王威威1,2,孙朋1,3,孙磊1,4
1哈尔滨理工大学机械动力工程学院,黑龙江 哈尔滨
2中航光电科技股份有限公司,河南 洛阳
3哈工大机器人集团(哈尔滨)华粹智能装备有限公司,黑龙江 哈尔滨
4中国航发哈尔滨东安发动机有限公司,黑龙江 哈尔滨

收稿日期:2017年8月16日;录用日期:2017年9月2日;发布日期:2017年9月7日

摘 要
为了克服现有人力三轮车在行驶时跑偏和转向不灵便的问题,在分析了原有三轮车单轮驱动原理的基础上,提出了采用棘轮机构实现三轮车双轮驱动的设计思想。将三轮车双后轮轮毂内部分别安装上有个内棘轮,当运动从链轮传到后轴上时,安装在两个后轮上的内棘轮与后轴一起转动,带动两个后车轮同时转动,达到同时驱动的目的;当三轮车转弯时,手闸闸住一个后轮,该轮转速变慢或者不动,实现转弯,从而达到前进时不偏转的目的。通过样车实验表明,这种改进不仅行驶安全、可靠、便捷,价格合理,具有较高的推广价值和 市场应用前景。
关键词 :三轮车,无跑偏,双轮驱动

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
目前随着社会的发展,机动车辆、电动车辆的数量有了大幅度攀升,给人们的生活带来了许多方便。与此同时人力三轮车以其价格便宜、方便实用、行驶安全的特点仍然被大众所青睐,尤其是在一些自由市场,依旧被视为无法替代的交通工具。
但是现有人力三轮车在设计上存在缺陷。任何驾驶过人力三轮车的人都会有一个感觉,在行驶中三轮车会自动地向一边转,必须靠驾驶者不断调整才能正常行驶,这就给驾驶带来诸多不便,并且存在安全隐患。人力三轮车之所以会有这种缺陷,是因为三轮车采用了单轮驱动的驱动方式。
在普通人力三轮车上,人蹬三轮车产生的力矩并不是均匀的同时传递到两个后轮上的。具体来说,人蹬三轮车产生的力矩通过链传动传递到后轮的棘轮也就是通常说的飞轮上,通过飞轮,力矩就传递到了后轴上。然而普通三轮车在设计上的缺陷是三轮车的两个后轮毂与轴的连接并不一样。其中的一个轮毂与后轴之间有周向定位,而另一个轮毂松套在后轴上,不添加周向定位。这样后轴上的力矩只能传递到一个轮毂上,也就是说三轮车采用的是单轮驱动方式。这种驱动方式带来的一个结果就是三轮车行驶时会固有的产生一个偏转力矩,导致三轮车自身偏转,因此给驾驶者带来不便。
另外,在三轮车转弯时,如果转弯过急会导致外轮悬空,甚至发生翻车,存在安全隐患。因此很有必要对普通三轮车这些缺陷进行改进。考虑到普通人力三轮车发生偏转是由驱动方式引起的,所以要改进三轮车就要从改变驱动方式入手。对于后轴驱动的车辆,当力矩传递到后轴时,后轴必须具备的功能是产生差速,这样车辆才能正常行驶转弯。一般的机动车辆是通过在后轴安装齿轮差速器,采用半轴结构来实现的,这种方式能灵活的产生差速,并且精度高 [1] 。但是这种差速器并不适用在人力三轮车上。人力三轮车要求价格便宜,如果采用齿轮差速器的半轴机构将大幅提高三轮车价格,影响其经济性。
本文通过两个对称的棘轮机构将力矩由轴上的棘爪传递到与棘轮固连的轮毂上,利用棘轮机构的单向传递作用产生差速。在正常行驶时,由于棘轮对称分布,实现双轮驱动,消除了三轮车的偏转问题。在此基础上改进了三轮车的刹车系统。利用两个棘轮外缘作为制动器,将两个相同的闸带有间隙地套在棘轮外缘上,制动时让闸带抱紧棘轮外缘,达到制动的目的靠。在转弯时可以适当调节一个制动器,可使转弯灵活。
双棘轮机构结构简单,可靠性高,价格便宜,用在人力三轮车上非常合适 [1] ,刹车系统的改进完全可以利用现有零件,因此价格上不会有太大提高。经过计算,整套传动系统和刹车系统改进,价格提高不过一百多元,经济性好具有推广价值。
2. 工作原理
2.1. 轴系的设计及驱动原理 [3]
如图1所示,为了使力矩从链轮传递到后轴,在后轴中间加一链轮,力矩通过链轮传递到后轴上。轴系左右部分设计为对称结构,所以只对一端加以说明。
轴承的轴向固定由轴肩和套筒完成。套筒6装入轮毂4中,两端顶紧轴承外圈。为了防止轴承定位不准,必须使套筒位置固定,所以在轮毂中间部位开孔,加紧螺钉固定套筒。轮毂与内棘轮3之间用圆锥销2传递力矩。为了防止圆锥销向外松动,可在棘轮外圈上使用挡圈和螺钉。棘爪7处于棘轮内圈上,棘轮内圈与后轴之间采用螺纹连接。需要指出的是,两端的螺纹螺旋方向是相反的,要保证三轮车行驶时螺纹连接越来越紧。整个轴系通过两个深沟球轴承固定在车架上,达到行驶轻便的目的。
与普通人力三轮车单轮驱动原理不同,改进后的三轮车是后轴与两个轮毂通过棘轮传递力矩的双轮驱动方式。当人蹬三轮车时,产生的力矩通过链传动传递到后轴,后轴上的棘爪带动棘轮传动,棘轮与轮毂固连在一起,所以轮毂也就随着棘轮被棘爪驱动起来。由于棘轮机构是对称分布的,因此后轴力矩被均匀的传递到轮毂上。消除了偏转力矩,三轮车可以平稳行驶。
2.2. 刹车及辅助转向原理
改进后的人力三轮车的刹车系统有一对相同的闸带式制动器构成,闸带有间隙的套在棘轮上,闸带通过闸线与手把处的刹车手柄相连,手柄在左右手把处各方一个,分别控制各侧的制动器。当需要刹车时,握紧手柄,闸带抱紧棘轮,即可达到刹车目的。刹车系统的另一个作用是辅助转向。
如图2所示,当需要三轮车向左转向时,可适当调节左边的刹车手柄,降低左轮转速从而使转向轻便。如图所示,三轮车向左转弯,设后轴的转速 ,左轮的转速
,左轮的转速 ,右轮的转速
,右轮的转速 ,由于棘轮是单向传动,则有:
,由于棘轮是单向传动,则有:
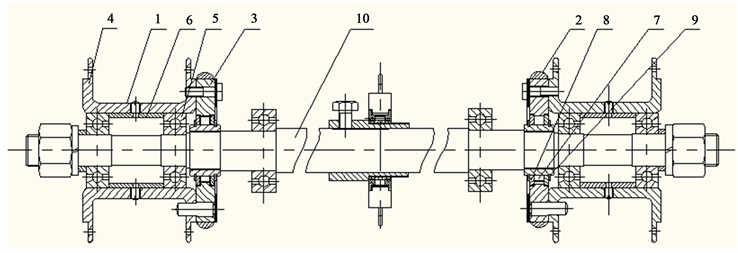
Figure 1. Backshaft assembly diagram
图1. 后轴装配图
Figure 2. Left-handed rotation schematic diagram
图2. 左转示意图
 (1)
(1)
 (2)
(2)
人驱动三轮车向左转弯时:
 (3)
(3)
 (4)
(4)
所以三个转速之间的关系是:
 (5)
(5)
轮毂2的转速大于轮毂的转速,从而实现了差速。
3. 主要结构及承载能力计算
3.1. 估算作用在后轴的最大作用力矩M [2]
如图3, :链作用与后轴飞轮的力矩。
:链作用与后轴飞轮的力矩。
 :左右外棘轮作用于后轴棘爪的力矩。
:左右外棘轮作用于后轴棘爪的力矩。
估计一般人的质量60 kg,人蹬三轮车的最大力近似为人的质量G,因此:
 (6)
(6)
人蹬三轮车的回半径:
 (7)
(7)
三轮车链传动的传动比:
 (8)
(8)
 (9)
(9)
忽略轴上的摩擦力,

Figure 3. Backshaft momental schematic diagram
图3. 后轴力矩示意图
由轴的平衡条件得:
 (10)
(10)
后轴结构上左右对称,故:
 (11)
(11)
解得:
 (12)
(12)
3.2. 棘轮机构的设计及强度计算
如图4,棘轮机构运动可靠,机构简单,用于低速和轻载下的运动。关于棘轮机构的结构设计已有现成方法 [4] ,这里不再赘述其设计过程。下面简单校核一下棘轮机构的承载能力。
棘轮齿的强度按齿根弯曲验算,也可以按齿面受挤压进行验算。一般来说,在三轮车这种轻载运输机械中,齿面受挤压破坏较多,所以在这里采用后者验算。
棘轮模数按齿面挤压验算公式 [4] :
 (13)
(13)
式中: :模数。
:模数。
 :扭矩,上述计算为2856 N×m。
:扭矩,上述计算为2856 N×m。
 :齿数设计为20。
:齿数设计为20。
 :齿宽系数,取1.5其中
:齿宽系数,取1.5其中 为齿宽。
为齿宽。
 :许用单位线压力,单位N/mm取400 N/mm。
:许用单位线压力,单位N/mm取400 N/mm。
由于在每个棘轮中采用了两个棘爪,扭矩应减半,但考虑到加工安装误差,扭矩按减小为0.7倍计算。带入(11)式计算得:
 棘轮在实际设计时模数取2,远远大于0.058,所以棘轮齿是安全得。至于棘爪得强度,考虑到三轮车受载轻,速度低,且采用了双棘爪结构,一般在有限寿命内不会破坏,所以不再单独校核。
棘轮在实际设计时模数取2,远远大于0.058,所以棘轮齿是安全得。至于棘爪得强度,考虑到三轮车受载轻,速度低,且采用了双棘爪结构,一般在有限寿命内不会破坏,所以不再单独校核。
3.3. 刹车系统的结构设计及
计算带式制动器机构简单,尺寸紧凑,可以产生较大的制动力矩。人力三轮车受载一般较小,并且要求
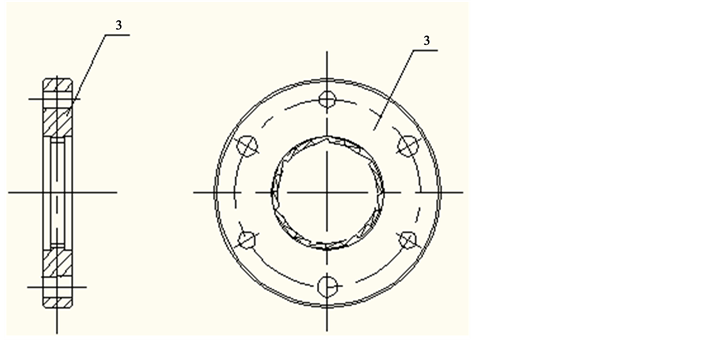
Figure 4. Ratchet wheel detail drawing
图4. 棘轮零件图
制动操作简单可靠,价格便宜,适合采用带式制动器。
传统的三轮车制动时,采用一个带式制动器,装在后轴中间,制动时后轴承受较大力矩,给轴带来不利影响。所以在改进三轮车驱动方式的同时,有必要对三轮车的刹车系统加以改进。
改进后的三轮车采用两个相同的带式制动器,使其左右对称的布置在轴的两端。如图5所示,将带式制动器固定在刹车固定板上,在刹车固定板的中间开一个较大的圆孔,棘爪从中间穿出,套在棘轮上。刹车固定在车架上,这样施加如图中的力F,就能使闸带抱紧轮轴从而达到制动目的。如前文所述,当三轮车转弯时,可轻握一个制动器,使三轮车自动转弯。
刹车系统作为车辆中的重要部件,在车辆行驶中起到保障安全的作用。刹车系统的灵敏与否直接影响车辆的行驶安全。下面估算一下在三轮车载重较大时,遇到紧急情况的刹车距离。在三轮车制动时,起到制动的力有车轮与地面之间的摩擦力,轴承内部的摩擦,棘爪划过棘轮轮齿的摩擦力以及闸带产生的摩擦力矩,其中闸带产生的摩擦力矩比其他力矩大的多,所以其他摩擦力忽略不计。
设人的质量: ;三轮车的载重重量:
;三轮车的载重重量: ;三轮车的载重重量:
;三轮车的载重重量: 。
。
三轮车刚要制动时速度: 。
。
单个棘轮与闸带间的摩擦力: 。
。
制动过程棘轮与闸带之间的直线相对位移: 。
。
根据动能定理:
 (14)
(14)
紧急刹车的情况下要求刹车距离要短,所以可以假设相对地面刹车距离时1 m,转化到棘轮与闸带之间的直线相对位移是 ;正常状况下可假设人的质量是60 kg;三轮车最大载重量300 kg;三轮车车重70 kg;车速假设为3 m/s (10.8 km/h)。将参数代入(13)式得:
;正常状况下可假设人的质量是60 kg;三轮车最大载重量300 kg;三轮车车重70 kg;车速假设为3 m/s (10.8 km/h)。将参数代入(13)式得:
下面估算三轮车在重载紧急刹车时的制动力Q [5] :
如图6是刹车时制动器的受力简图,不计闸带的厚度及闸带与制动器之间的间隙,也不考虑制动器的回复弹簧力。根据带式制动器工作原理有:
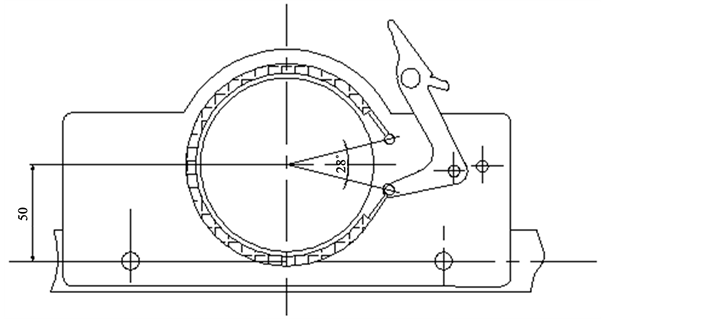
Figure 5. Braking system
图5. 刹车系统

Figure 6. Braking system force diagram
图6. 刹车系统受力简图
 (15)
(15)
临界状态下,带式制动器满足欧拉公式:
 (16)
(16)
 :自然对数底数
:自然对数底数 。
。
 :闸带与制动轮间的摩擦系数。
:闸带与制动轮间的摩擦系数。
4. 结论
本作品是基于普通家用三轮车改装而成,通过改变普通家用三轮车的驱动方式克服原来三轮车在行驶中偏向一侧的缺点,使三轮车行驶更安全平稳。普通家用三轮车采用单轮驱动,在行驶中会产生偏转力矩,使车身向一侧偏转,造成驾驶不便,存在安全隐患。为此,我们设计了运用两个棘轮驱动双轮的三轮车无跑偏系统。该系统采用双轮同时驱动,驱动力矩通过链传动传递到后轴,后轴力矩通过两个内棘轮同时传递到两个轮上,是三轮车前进,实现了整轴双轮驱动,消除了单轮驱动的偏转力矩,使三轮车在行驶中不出现跑偏现象,从根本上解决三轮车的跑偏问题。内棘轮的外缘与车轮轮毂用圆锥销连接,支撑棘爪的零件与轴之间,用螺纹连接,轴承作为轮毂的支撑。
刹车系统由后轮两个对称的车闸通过闸线与手柄相连,刹车时闸皮与内棘轮外缘产生摩擦。在向一侧拐弯时,适当握紧一侧车闸利用两轮间的转速差,达到轻松转弯的目的。两个车闸同时制动则实现刹车制动。
根据我们的调研结果,市场上还没有同类产品,我们的设计运用到人力三轮车上不增加太多成本。同时可以推广运用在含有差速器的小型电动三轮车上,代替差速器显著地降低成本。因此无跑偏驱动及转向系统具有很大的现实意义及推广价值。
基金项目
大学生创新实验基金。
文章引用
王丽雪,张春宜,王威威,孙朋,孙磊. 无差速器无跑偏三轮车设计
The Design of Non Differential Tricycle without Deviation[J]. 仪器与设备, 2017, 05(03): 63-70. http://dx.doi.org/10.12677/IaE.2017.53009
参考文献 (References)
- 1. 张春宜, 等. 无差速器的无跑偏驱动三轮车[P]. 中国专利, ZL201220269078.X, 2012.
- 2. 机械设计手册编委会. 机械设计手册(新版第三卷) [M]. 北京: 机械工业出版社, 2008.
- 3. 成大先. 机械设计图册[M]. 北京: 化学工业出版社, 2000.
- 4. 傅祥志. 机械原理(第二版) [M]. 武汉: 华中科技大学出版社, 2000.
- 5. 严学高, 孟正大. 机器人原理[M]. 南京: 东南大学出版社, 1992.
NOTES
*通讯作者。