Modeling and Simulation
Vol.
12
No.
04
(
2023
), Article ID:
68787
,
13
pages
10.12677/MOS.2023.124338
基于模糊PID的压缩机吸气干度控制仿真研究
任凯,陶乐仁*
上海理工大学能源与动力工程学院,上海
收稿日期:2023年4月18日;录用日期:2023年7月10日;发布日期:2023年7月17日

摘要
为了解决R32制冷系统压缩机排气温度高的问题,采用压缩机少量吸气带液能够有效降低排气温度并提高系统循环效率,且滚动转子式压缩机具有一定的抗湿压缩能力。如何精确稳定控制吸气干度是亟待解决的问题,本文针对压缩机吸气干度控制,设计了参数自整定模糊PID控制系统,并进一步使用粒子群算法对模糊控制的量化因子和比例因子进行优化。通过对传统PID控制、参数自整定模糊PID控制以及粒子群优化后的模糊PID控制进行仿真分析,结果表明模糊PID控制相比PID控制超调量减少了3.8%,控制时间缩短了20%,而粒子群算法优化过后的模糊PID相比未优化超调量进一步减少了4.3%,控制时间缩短了11%。
关键词
吸气干度,模糊自适应PID控制,粒子群算法

Simulation Study on Suction Vapor Quality Control of Compressor Based on Fuzzy PID
Kai Ren, Leren Tao*
College of Energy and Power Engineering, University of Shanghai for Science and Technology, Shanghai
Received: Apr. 18th, 2023; accepted: Jul. 10th, 2023; published: Jul. 17th, 2023

ABSTRACT
In order to solve the problem of high discharge temperature of the R32 refrigeration system compressor, Suction vapor-liquid mixture refrigerant can effectively reduce the discharge temperature and improve the system’s circulation efficiency. Moreover, the rolling rotor compressor has certain anti-wet compression ability. How to accurately and stably control the suction suction vapor quality is an urgent problem to be solved. In this paper, for the control of compressor suction vapor quality, a parameter self-tuning fuzzy PID control system is designed, and further, the particle swarm optimization algorithm is used to optimize the quantization factor and proportion factor of the fuzzy control. Through simulation analysis of PID control, parameter self-tuning fuzzy PID control, and fuzzy PID control after particle swarm optimization, the results show that compared with PID control, fuzzy control reduces overshoot by 3.8% and shortens control time by 20%, and after particle swarm optimization, fuzzy PID control further reduces overshoot by 4.3% and shortens control time by 11%.
Keywords:Suction Vapor Quality, Fuzzy Adaptive PID Control, Particle Swarm Optimization

Copyright © 2023 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
R32制冷剂在R22制冷剂由于对环境的污染提出需要停止使用后被视为替代制冷剂进行了广泛的研究 [1] 。而采用R32的制冷系统排气温度高的问题一直是其能否被广泛使用的焦点问题 [2] 。而有研究表明,压缩机在压缩过程中适量吸入制冷剂液滴,能够大幅度地降低排气温度,有效提升整个制冷系统的性能,且滚动转子式压缩机具有一定的抗湿压缩特性 [3] [4] 。针对于滚动转子式压缩机R32制冷系统的不完全湿压缩,需要将压缩机吸气干度控制在可控范围之内,以防止压缩机过量吸气带液而直接损坏压缩机和大幅度降低压缩机的压缩效率,设计一套控制效果优秀的干度控制方案就显得尤为重要。
王超等 [5] 基于R32滚动转子式制冷系统,研究了压缩机少量吸气带液对排气温度的影响,结果表明:通过一定程度下的吸气带液能够在不影响压缩机健康运行的前提下有效抑制压缩机的排气温度偏高的问题,并指出存在最佳干度范围在0.96到1之间。虞中旸等 [6] 以压缩机吸气过热度为控制对象,通过电子膨胀阀开度将过热度控制在0.5 K到系统少量吸气带液之间,该控制方法的平均COP高于定阀开度控制的平均COP,最大可高20%左右。但该文中的控制方法比较粗糙,通过开环控制手动调节电子膨胀阀开度来将蒸发器出口过热度控制在目标范围内浮动,有控制精度低和在实际工程中无法应用的缺点。
Yasuda H [7] 等通过研究发现,通过使用PI控制来达到改变电子膨胀阀开度控制蒸发器过热度的控制目标时,控制过程并不稳定系统产生振荡。由于PID的参数设定是基于固定简化的模型上的,而制冷系统由于外部内部影响,工况多变,所以固定参数的PID控制很难达到良好的控制效果 [8] 。Tassou等 [9] 也通过实验证明了PID控制器的控制参数应该随着工况变化而改变。白梓运 [10] 通过设计了一种最小方差自自适应控制并与PI控制进行仿真对比,结果表明对于蒸发器过热度的控制来说自适应控制的效果要更加优秀,并提出需要将运用模糊控制的思想将自适应控制技术与PID控制相结合。杨磊等 [11] 通过结合PID控制与模糊控制,设计模糊PID控制器对冷库过热度进行控制,相比传统PID控制取得了更小的超调量,更强的抗干扰能力与鲁棒性。
上述国内外研究说明了对于压缩机少量吸气带液来说,缺少能够自动精准控制吸气干度的方案,而当前对制冷系统控制方案的研究主要集中于蒸发器过热度方面,对吸气干度的控制研究还十分缺乏。故本文基于Matlab/simulink搭建了压缩机吸气干度控制模型,设计了参数自整定模糊PID控制系统,并引入粒子群算法进行进一步优化。
2. 压缩机吸气干度的数学模型
2.1. 系统辨识方法
进行控制系统仿真之前需要先建立被控对象的数学模型,有了被控对象的数学模型才能够以此为基础建立合适的控制模型。建立被控对象的数学模型有两种方法,理论建模和系统辨识,理论建模需要对整个制冷系统的理化过程具有相当全面深刻的理论分析,同时对于一些复杂的系统,人们对其内部运行规律并未研究清楚,而系统辨识是一种具有普遍意义的方法,该方案能够适合任何的复杂系统和过程 [12] 。
2.2. 干度对电子膨胀阀开度的跃迁响应实验及计算公式
实验装置如下图1所示:
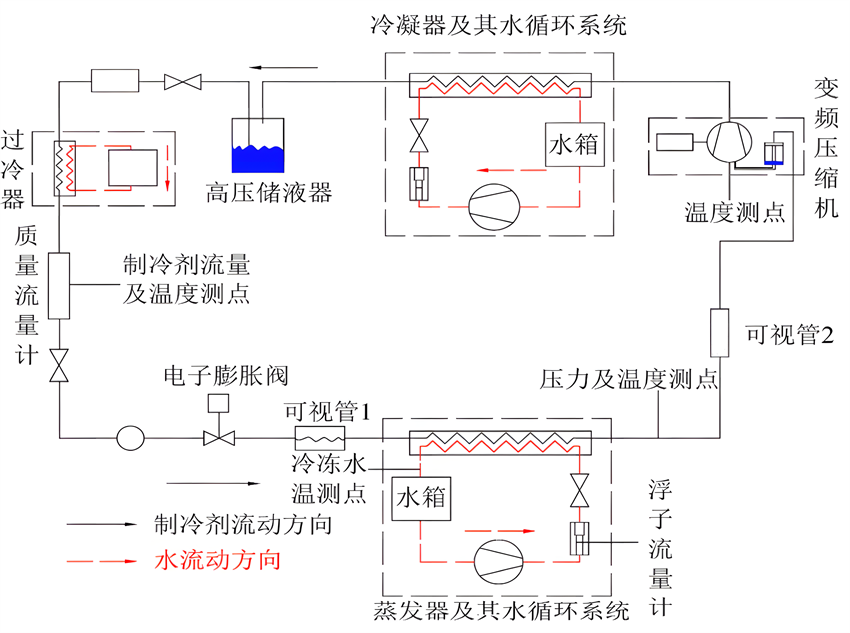
Figure 1. Schematic diagram of experimental device
图1. 实验装置原理图
实验台电子膨胀阀选用DPF1.6直动式电子膨胀阀通过AKS-0.1Z的步进电机进行驱动控制。压缩机为变频滚动转子式压缩机,理论排量为10.2 mL。为了实时测算压缩机吸气干度,试验台通过热平衡法对干度进行推算,此方法需要换热器有比较优秀的换热效率,且电子膨胀阀前需要处于过冷态。为了避免热平衡时间过长,因此试验台换热方式采用水循环换热,蒸发器和冷凝器均为板式换热器,采用PID反馈控制通过电加热器对冷冻水及冷却水出口水温进行调节。外部设置有恒温水箱,通过套管连接,控制高压储液罐流出的制冷剂有一定过冷度。测量温度的铂电阻斜插入管道内部,减小对流场的破坏,温度偏差为±0.15℃ + 0.002|t| (t为测量温度,℃)。
实验流程为:压缩机频率设置为50 Hz,电子膨胀阀开度步数为1290,冷冻水进水温度保持为10℃,冷却水出水温度保持为30℃。运行试验台直至系统参数稳定,稳定10分钟后改变电子膨胀阀开度步数至1170,其余参数均保持不变,运行至系统稳定后记录电子膨胀阀开度改变前后的干度响应。
计算公式如下:
蒸发器水侧换热量Q:
(1)
式中:qw为冷冻水体积流量,单位L/min;rw为水的密度,单位kg∙m3;cw为水的定压比热容,单位kJ/(kg∙℃);Tw,i为冷冻水的进口温度,单位℃;Tw,o为冷冻水的出口温度,单位℃。
压缩机吸气比焓hin:
(2)
式中:hin为压缩机吸气口制冷剂比焓,单位kj/kg;hsc为节流阀前制冷剂比焓,单位kj/kg;qm为系统循环的制冷剂质量流量,单位kg/s。
压缩机吸气干度x:
(3)
式中:hl为蒸发压力下的制冷剂饱和液态比焓,单位kj/kg,hv为蒸发压力下的制冷剂饱和气态比焓,单位kj/kg。
理论压缩机吸气干度范围为0 < x < 1,当压缩机吸气状态处于过热时,按式(3)计算得到的干度值x大于1,此时压缩机吸气干度x没有实际物理意义,仅代表压缩机吸气处于过热状态。
通过实验改变电子膨胀阀开度步数进行跃迁得到压缩机吸气干度的响应曲线。如图2所示。
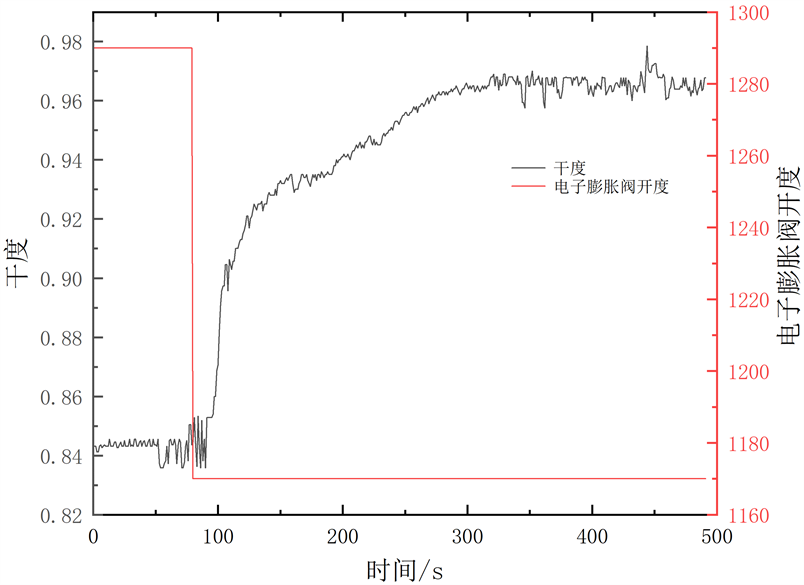
Figure 2. Response curve of electronic expansion valve opening transition to suction vapor quality
图2. 干度对电子膨胀阀开度跃迁响应曲线图
2.3. 干度模型系统辨识
通过实验获得电子膨胀阀开度对干度的跃迁响应。使用Matlab系统辨识工具箱,对电子膨胀阀开度步数与干度的跃迁关系进行离线系统识别,建立传递函数。其工作原理为通过实验得到的输入和输出的数据构建过程模型,而不需要分析系统内部运行机理,系统被看作“黑箱”模型,根据输出改变和系统的跃迁响应来辨识“黑箱”的内部机理 [13] [14] 。
使用Matlab的System Identification工具箱进行系统辨识设置延迟时间10 s,改变传递方程阶数和极点数量,通过比较拟合度最高为85.74%,传递函数为:
(4)
式中:s为拉普拉斯算子。
3. 参数自整定模糊PID控制系统
3.1. 参数自整定模糊PID原理
对于电子膨胀阀的控制来说,其执行机构为步进电机,需要的输出是控制量的增量,即为每次阀开度的变化,所以本文设计采用的是增量式PID,增量PID控制方程为:
(5)
式中: 为采样时刻kT的输出量; 为采样时刻kT的偏差值; 为采样时刻 时的偏差值; 为两个周期之间控制器的输出量。
模糊控制是一种将人类思维与操作经验集成于计算机语言中的计算机控制方法,其模拟了人类的推理和判断过程,无需建立精确的系统模型,适用于复杂多变的系统。该控制方法通过将控制思想转换为多条控制规则存储于计算机中,并基于传感器采集的信息进行计算机分析,以实现系统的控制目的。
模糊控制器为双输入三输出,输入量分别为干度的偏差e和偏差变化率ec,其输出为PID控制参数调整量,即为比例系数增量ΔKp,微分系数增量ΔKi,积分系数增量ΔKd。则式(5)则变为:
(6)
模糊PID控制系统的工作流程为:模糊控制器首先通过量化因子将偏差e和偏差变化率转换为模糊论域内的E与EC,通过隶属度函数计算模糊子集的隶属度,基于模糊规则进行模糊推理得到模糊输出,再经过反模糊处理得到输出量的精确值,通过比例因子转换最终得到需要的ΔKp,ΔKi和ΔKd,输入进PID控制器内与初始控制参数相加,完成PID参数的自整定过程。
原理流程如下图3所示。
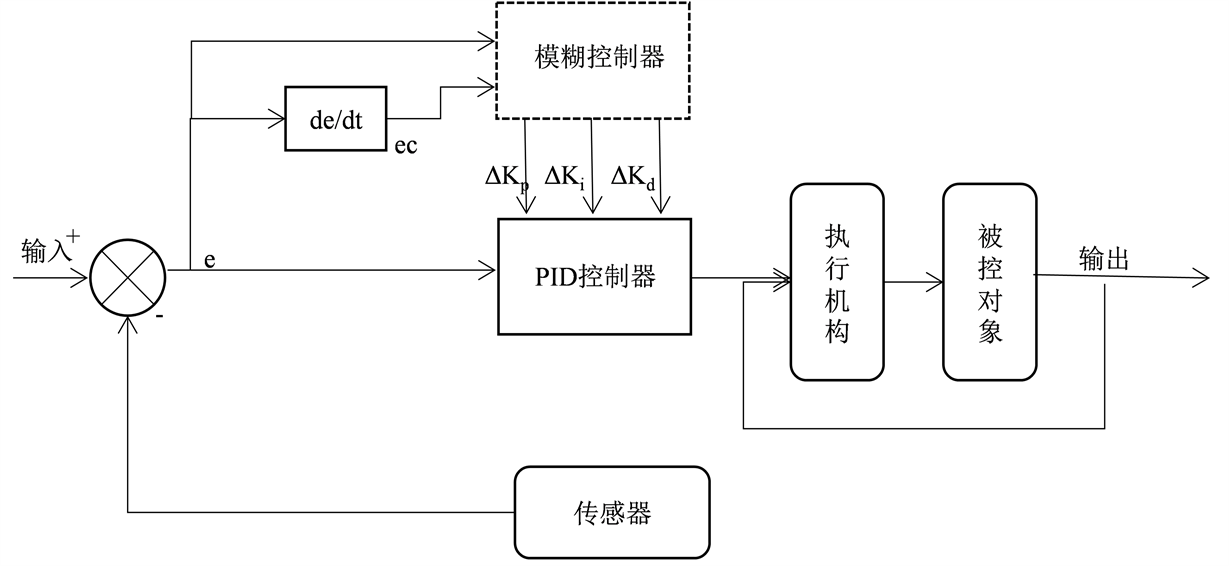
Figure 3. Block diagram of fuzzy PID control system
图3. 模糊PID系统原理框图
3.2. 模糊量化处理
考虑到控制精度和计算量,输入干度偏差e和干度偏差变化率ec的模糊论域范围设置为[−6, 6],比例系数增量ΔKp的模糊论域设置为[−2, 2],微分系数增量ΔKi的模糊论域设置为[−0.1, 0.1],积分系数ΔKd量设置为[−5, 5]。模糊语言变量均为{NB, NM, NS, Z, PS, PM, PB}。隶属度函数首位“NB”和末位“PB”设置为Z形和S形隶属函数,中间部分“NM,NS,Z,PS,PM”选用三角形隶属度函数。输入量偏差e的隶属度函数如下图4所示。

Figure 4. The membership function curve of input variable e
图4. 输入变量e的隶属度函数曲线
3.3. 模糊控制规则表
模糊规则是整个模糊控制器的核心,运用模糊规则经由模糊推理后才能够得到输出的模糊量。模糊规则的确定基于实际控制经验和专家知识之上。模糊规则常见的语言形式是“If输入量is A and输入量is B, then输出量is C”。
模糊PID的模糊规则需要根据不同时刻下即输入的偏差和偏差变化率发生变化时输出的三个PID参数增量所需要做出的调整,以满足对PID作出实时整定的需求,使被控对象由良好的动、静态性能 [15] 。模糊PID的模糊规则基于专家经验并结合实际控制效果,其设计原则为 [16] [17] [18] :
当偏差的绝对值 较大时,此时应该增加系统响应速度,从而尽快减小误差,所以比例参数增量ΔKp取较大值。另外为了防止积分饱和和产生大幅度超调引起系统振荡,积分参数增量ΔKi和微分参数增量ΔKd较小值。
当偏差的绝对值|e|中等大小时,如果e∙ec < 0,此时系统的偏差有减小的趋势,此时需要减小比例系数的增量,取中等大小的ΔKp值,ΔKi和ΔKd取中等大小的值消除静态误差稳定响应曲线。如果e∙ec > 0,说明误差有增大的趋势,此时应当增加控制效果,达到快速减小误差的目的。取较大的ΔKp,同时取中等大小的ΔKi和ΔKd来稳定系统。
当偏差的绝对值|e|较小时,如果e∙ec < 0,此时需要减小比例系数来防止产生超调,所以取较小的ΔKp值,同时需要消除系统稳态误差,达到控制目标需要加强积分环节,所以取较大的ΔKi值,考虑到系统的稳定性避免在目标值处产生振荡,取中等大小的ΔKd值。如果e∙ec > 0,此时需要取中等大小的ΔKp值,保持速度接近目标值,取较大的ΔKi值消除稳态误差,取适当大小的ΔKd值稳定系统。
当偏差的绝对值|e|接近0时,若偏差变化率的绝对值|ec|中等大小或者偏小,ΔKp,ΔKi,ΔKd值需要取0或者0值附近来稳定系统防止超调和产生振荡,完成达到控制目标。
基于以上控制原则,并结合实际控制效果进行不断调整,分别建立ΔKp,ΔKi,ΔKd的模糊控制规则,如下表1、表2、表3所示。

Table 1. Fuzzy control rules for ΔKp
表1. ΔKp的模糊控制规则
Table 2. Fuzzy control rules for ΔKi
表2. ΔKi的模糊控制规则
Table 3. Fuzzy control rules for ΔKd
表3. ΔKd的模糊控制规则
3.4. 模糊推理以及反模糊化
模糊推理方式使用常用的Mamdani最大最小推理方法,其运算法则是将输入量的模糊集合进行求笛卡尔积取面积的最小值。
经过模糊推理后得到的输出是模糊集,因此无法作为控制量直接输入到执行机构当中,需要进行反模糊化得到精确输出值,通过Centroid面积重心法进行反模糊化,面积重心法通过计算隶属度函数和横坐标包围的几何面积,然后取其重心的横坐标作为清晰值来进行模糊转换,即针对一个模糊变量,我们需要知道其隶属度函数(即模糊集合中元素所对应的模糊程度),以及这个模糊变量在不同隶属度下所占据的面积。通过计算这些面积,并求出它们的重心,我们可以得到一个清晰值,这个清晰值可以代表这个模糊变量输出的实际值。
3.5. 参数自整定模糊PID仿真系统设计
基于Matlab/simulink软件建立模糊PID控制仿真系统如下图5所示,控制系统部分分为模糊控制器和PID控制器。
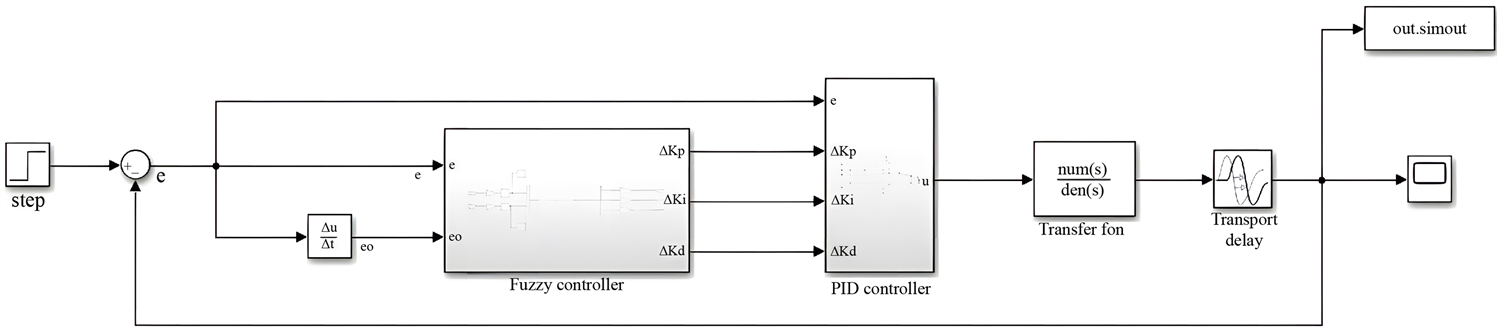
Figure 5. Simulation system diagram of fuzzy PID control
图5. 模糊PID控制仿真系统图
PID控制初始控制参数首先使用Ziegler-Nichols方法进行整定并在此基础上通过试凑法进行进一步参数整定。最终在保证合适的系统调节响应速度和较小的超调量的前提下,确定Kp0为2371.87,Ki0为20.74,Kd0为5244。
模糊控制器中输入量的量化因子Ke,Kec分别取1.2和0.2,K1,K2,K3分别为输出量ΔKp,ΔKi,ΔKd的比例因子,基于PID参数的初始值大小和输出增量的模糊论域,对K1,K2,K3使用试凑法进行不断调整,综合控制响应速率和稳定性,选定比例因子K1 = 500,K2 = 600,K3 = 450。
4. 粒子群算法优化模糊PID
在模糊控制理论中比例因子和量化因子都是十分重要的参数,它们的参数大小是否合适对模糊控制器的性能至关重要 [19] 。传统的方法通常需要通过专家经验或试错方式进行参数优化,这种方法存在着主观性强、效率低、精度不高等问题。而粒子群算法是一种基于自适应搜索的全局优化方法,尤其适用于非线性、多峰、高维等复杂问题的求解。利用粒子群算法优化模糊控制的量化因子和比例因子可以有效降低系统设计难度和提高控制精度。
粒子群算法以鱼群或鸟群为基础,研究鱼类和鸟类的转移行为。因此,我们认为这些粒子在环境中漫游。粒子在确定的搜索空间中运动,每次运动后,粒子的位置被记录下来,并对下一次的位置和速度进行更新。粒子通过信息共享机制使个体能够相互学习经验,进而促进整个群体的发展。在粒子群算法中,粒子用于表示搜索空间中的成员,代表着潜在的解。通过计算粒子的目标函数来确定其适应度值,全局最优解被视为食物位置。在算法运行过程中,粒子会不断地向全局最优解和个体最优解移动,以期望获得更好的适应度值,从而找到最优解。粒子的位置和速度更新式为 [20] :
(7)
(8)
式中:vj为粒子运动速度,pj为粒子位置矢量, , ,ra为随机数(0,1),wf为惯性权重,c1和c2为定义学习因子(加速常数),g表示迭代次数,gbestj,ds为全局最佳位置,pbestj,ds为每个粒子的最佳位置。
粒子群算法优化模糊PID控制流程图如图6所示。粒子群算法中有5个参数需要优化:Ke,Kec,K1,K2,K3,分别表示误差e、误差变化率ec的比例因子和ΔKp,ΔKi,ΔKd的量化因子 [21] [22] 。

Figure 6. Flowchart of particle swarm optimization for fuzzy PID control
图6. 粒子群算法优化模糊PID控制流程图
粒子群算法的相关参数设置为:最大迭代次数为100;粒子群规模为50;加速常数为2;惯性权重为0.6。
5. 仿真结果对比
图7为本文所设计的粒子群算法优化模糊逻辑PID控制策略与传统PID控制和模糊PID控制的对比结果。可以发现,粒子群算法优化模糊逻辑PID控制策略明显比另外两种控制器各方面都有更好的性能。
表4为三种控制器的控制数据对比。可以发现,PID控制器的上升时间、调节时间和超调量分别为155 s,440 s和9.8%,模糊PID控制器的上升时间、调节时间和超调量分别为130 s,350 s和6%,粒子群算法优化模糊逻辑PID控制策略的上升时间、调节时间和超调量分别为124 s,310 s和1.7%。
在实际运行中,系统可能会受到外部条件干扰,比如冷冻水温度或者流量发生波动而导致蒸发负荷改变从而导致实际干度值发生突变,故需要对控制系统的抗干扰性能进行验证。图8为三种控制系统在外部扰动的情况下的系统输出结果。在500 s的时候加入一个0.3的扰动,来观测系统的输出响应。由图发现,粒子群算法优化模糊逻辑PID控制策略依旧表现出了优异的抗干扰性能性能,在扰动的情况下,超调量更小,依旧能快速的回到达设定值,稳定时间也更短。同样发现,本文所设计的控制策略能够有效克服干扰,具有更小的超调和更快的响应速度。

Figure 7. Comparison results of system outputs for three controllers
图7. 三种控制器系统输出的对比结果
Table 4. Comparison of data of three controllers
表4. 三种控制器数据对比

Figure 8. System output results of three control systems under external disturbance
图8. 三种控制系统在外部扰动的情况下的系统输出结果
图9讨论了三种控制器在外部输入变化的情况下的响应结果。由于系统在实际的运行过程中,可能会因为外部需求的变化,导致系统中需求会突然变化的情况。因此,我们讨论了输入阶跃变化时,三种控制器的适应情况。给定系统的输入首先为0.5,在500 s的时候突然增加到0.96,然后在1000 s的时候由于外部需求突然降低到0.65。可以发现,即使是在外部输入阶跃变化的情况下,粒子群优化模糊PID控制策略依旧具有很好的适应能力,能够很好的跟踪系统的设定值,具有较快的响应速度且超调量最小。

Figure 9. Response results of three controllers under external input changes
图9. 三种控制器在外部输入变化的情况下的响应结果
在实际运行工况中,系统模型不是一成不变的,当外部工况变化时,系统模型也会随之变化,因此需要讨论当外部工况变化时,模糊PID控制器的控制性能。按照第二节模型建立方法建立其他条件不变,当蒸发温度改变时吸气干度随电子膨胀阀跃迁的传递函数。图10为当模型改变后PID控制与粒子群优化模糊PID控制的响应曲线对比。由图中可以十分直观的看到,当工况变化后系统模型发生变动,PID控制由于控制参数固定,产生了模型失配,此时固定的PID参数无法适配新的模型,从而导致系统发生了大幅度振荡,控制效果不佳。而模糊PID控制和粒子群优化后的模糊PID控制由于其PID参数能够随着误差和误差变化率的变化进行实时整定不断进行调整,所以它们的依旧保持着良好的控制效果,动态性能更加优秀。

Figure 10. Output curves of three controllers when model changes
图10. 模型变化时三种控制器的输出曲线
6. 结论
针对压缩机吸气干度需要得到精准控制的问题,通过设计参数自整定模糊PID控制,实现PID参数的实时适应,并针对模糊控制器中比例因子和量化因子选择存在较大的主观性和不确定性的问题,引入粒子群算法对其进行优化,仿真结果表明:
参数自整定模糊PID控制相比传统PID控制,上升时间从155s减少到了130 s,调节时间由440 s减少到了350 s,控制更加精准,超调量相比9.8%减少到了6%。
经过粒子群优化过后的模糊PID控制器相比未优化的模糊PID控制器,系统响应更快,上升时间从130 s减少到了124 s,调节时间由350 s减少到了310 s,控制更加精准,超调量相比6%缩减到了1.7%近乎没有超调。
分别模拟了系统在实际运行过程中遇到的干扰、控制目标值变化和工况变化导致模型失配情况下,PID控制、模糊PID控制和粒子群优化模糊PID的控制效果。结果表明,粒子群优化模糊PID皆表现出优秀的控制性能,且在模型失配的情况下,相比PID控制效果不佳,粒子群优化模糊PID仍然表现出色。
文章引用
任 凯,陶乐仁. 基于模糊PID的压缩机吸气干度控制仿真研究
Simulation Study on Suction Vapor Quality Control of Compressor Based on Fuzzy PID[J]. 建模与仿真, 2023, 12(04): 3684-3696. https://doi.org/10.12677/MOS.2023.124338
参考文献
- 1. Nagengast, B. (2000) It’s a Cool Story! Refrigeration and Air Conditioning in the 20th Century. Mechanical Engineering, 122, 56-63. https://doi.org/10.1115/1.2000-MAY-3
- 2. 吴建华, 胡杰浩, 陈昂, 等. 全封闭R32滚动活塞压缩机的热分析[J]. 西安交通大学学报, 2015, 49(3): 14-18+150.
- 3. 张利, 杨敏, 张蕾. 滚动转子式R32压缩机开发[J]. 制冷与空调, 2015, 15(2): 75-78.
- 4. 王乐民, 陶乐仁, 杨丽辉. 吸气状态对压缩机效率影响的实验研究[J]. 压缩机技术, 2016(3): 5-8.
- 5. 王超, 陶乐仁, 黄理浩, 等. R32制冷系统湿压缩的最佳吸气干度范围[J]. 化工进展, 2017, 36(1): 100-106.
- 6. 虞中旸, 陶乐仁, 袁朝阳, 王超. 电子膨胀阀调节对空气源热泵热水器性能的影响[J]. 制冷学报, 2017, 38(5): 65-70.
- 7. Yasuda, H., Ishibane, K. and Nakayama, S. (2011) Evaporator Superheat Control by an Electrically Driven Expansion Valve. Transactions of the Japan Society of Refrigerating and Air Conditioning Engineers, 9, 147-156.
- 8. Al-leyne, A., Brennan, S., Rasmussen, B., Zhang, R. and Zhang, Y. (2003) Controls and Experiments: Lessons Learned. IEEE Control Systems Magazine, 23, 20-34. https://doi.org/10.1109/MCS.2003.1234648
- 9. Tassou, S.A. and Al-Nizari, H.O. (1993) Investigation of the Effects of Thermostatic and Electronic Expansion Valves on the Steady-State and Transient Perfor-mance of Commercial Chillers. International Journal of Refrigeration, 16, 49-56. https://doi.org/10.1016/0140-7007(93)90021-Y
- 10. 白梓运, 陈芝久. 电子膨胀阀及其在蒸发器过热度自适应控制中的应用[J]. 暖通空调, 1996, 26(2): 21-24.
- 11. 杨磊, 马志艳, 石敏, 李江华. 基于模糊PID的小型冷库过热度控制方法[J]. 湖北工业大学学报, 2020, 35(4): 48-51.
- 12. 何煜, 仲华, 唐双波, 陈芝久. 制冷系统蒸发器过热度控制回路的MATLAB仿真[J]. 流体机械, 1999(8): 55-58.
- 13. 刘金琨, 沈晓蓉, 赵龙. 系统辨识理论及MATLAB仿真[M]. 北京: 电子工业出版社, 2013.
- 14. 吴凡, 李伟雄. 基于MATLAB系统辨识工具的系统辨识[J]. 河北农机, 2016(11): 59-60.
- 15. 王海青, 姬长英, 刘同召, 等. 模糊自整定PID温度控制系统的建模与仿真[J]. 计算机工程, 2012, 38(7): 233-235+239.
- 16. 叶建美. 基于PLC的瓦楞原纸模糊PID温度控制系统的设计与应用[D]: [硕士学位论文]. 杭州: 浙江工业大学, 2009.
- 17. 周驰. 基于Atmega128单片机的机房空调温度控制系统设计[D]: [硕士学位论文]. 南京: 南京理工大学, 2015.
- 18. 袁静雨, 虞启凯, 张凡雨. 基于Matlab的模糊自整定PID控制器仿真研究[J]. 仪器与设备, 2020, 8(4): 117-123.
- 19. 伞兵, 吴钢. 基于遗传算法的过热度模糊控制因子优化研究[J]. 低温与超导, 2010, 38(6): 44-48.
- 20. 蔡哲贵. 基于粒子群优化算法的模糊PI控制性能研究[J]. 软件工程与应用, 2022, 11(5): 1024-1036.
- 21. 柴钰, 王乔. 粒子群优化模糊PID的履带机器人运动控制研究[J]. 现代电子技术, 2018, 41(18): 49-53.
- 22. 刘祎玮, 唐路平, 王咏婷, 魏伶俐. 粒子群优化模糊PID的四旋翼飞行器控制[J]. 自动化与仪表, 2022, 37(8): 13-18.
NOTES
*通讯作者。