Computer Science and Application
Vol.
10
No.
02
(
2020
), Article ID:
34194
,
6
pages
10.12677/CSA.2020.102022
Design of Fire Fighting Robot System Based on Azimuth Real-Time Adjustment
Ying Zhuansun, Yuekun Liu, Sen Zhang, Xiuyan Liu*
School of Information and Control Engineering, Qingdao University of Technology, Qingdao Shandong

Received: Jan. 23rd, 2020; accepted: Feb. 7th, 2020; published: Feb. 14th, 2020

ABSTRACT
In order to solve the problem that the robot cannot flexibly change its position and deploy its position rapidly under the load of water in the rear hose, a fire fighting robot system with real-time adjustment of position is proposed in this paper. The system mainly includes fire fighting robot, hose active displacement mechanism and hose passive displacement mechanism, among which the omni-directional moving gear system of hose active displacement mechanism can realize omni-directional movement and can also realize the adsorption function of hose passive displacement mechanism. The cascade system composed of active displacement mechanism and passive displacement mechanism of hose can realize real-time change of hose bearing, avoid the difficult problems of hose removal and drainage caused by secondary position deployment of robot, and effectively improve the efficiency of rapid deployment and bearing change of fire fighting robot.
Keywords:Fire Protection Robot, Orientation Realtime Adjustment, Rear Hose

基于方位实时调整功能的消防灭火机器人系统设计
颛孙盈,刘月锟,张森,刘秀燕*
青岛理工大学信息与控制工程学院,山东 青岛

收稿日期:2020年1月23日;录用日期:2020年2月5日;发布日期:2020年2月14日

摘 要
针对消防机器人在后方水带充满水的负载情况下机器人不能灵活进行方位灵活变换及快速位置部署的问题,本文提出一种具备方位实时调整功能的消防灭火机器人系统。该系统主要包括消防灭火机器人、水带主动位移机构、水带被动位移机构,其中水带主动位移机构的全向移动轮系可实现全方位移动,还可实现对水带被动位移机构的吸附功能。水带主动位移机构、水带被动位移机构组成级联系统可实现对水带方位实时变换,避免了机器人因二次位置部署导致的水带摘除和排水等难题,有效提高消防机器人快速部署和方位变换效率。
关键词 :消防机器人,方位实时调整,后方水带

Copyright © 2020 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着经济和科学技术的飞速发展,石油、化工企业、地铁、隧道等的不断增加,危险化学品和放射性物质泄漏及燃烧、爆炸、坍塌事故也在增多。灾害事故发生时,高温、黑暗、有毒和浓烟等对消防救援人员和事故现场的被困人员的安全都会构成极大威胁。目前,消防人员在高危火场等事故现场救援或勘察中存在许多劣势,例如在面临易燃易爆气体、有毒有害、高温浓烟等灾害情况时,容易给消防员带来中毒、烧伤甚至死亡威胁 [1]。因此,现在越来越多的消防灭火机器人逐渐代替人工在火灾等现场作业。我国的消防机器人研制工作将会越来越得到有关部门的大力重视和支持,越来越多的消防指战员已经认识到消防机器人的重要性,随着消防机器人的技术不断完善,消防机器人的市场正在逐渐形成 [2] [3]。
目前存在的消防机器人 [4] [5],上方都设置有水炮,水炮后方留有水带接口,通过拖动未充水的水带进入救援区域,通过控制消防车高压泵开关实现水流喷射灭火功能 [6] [7]。消防机器人尽管可以代替消防员实现近距离灭火功能,但是机器人上装的消防水炮灭火距离和范围有限,而消防水带内充满水后,水带自身重量很重、且水带与地面摩擦力很大,导致机器人进行位置移动变得极为困难,非常不利于大型火灾的机器人快速位置部署,反而限制现场救援的灵活机动性。机器人若要实现方位变换,需消防人员上前从机器人后方摘下水带,若水带长度较短、消防人员数量足够多,则可人工移动水带后重新将水带接入消防机器人;若消防员数量小、消防水带较长,则只能人工将水带内的水挤压出去,重新将空水带接入机器人,从而实现消防机器人的方位变换功能 [8] [9]。但是以上两种方式均存在很多弊端,如需要较多数量的消防员或需要消防员上前摘除消防水带等 [10] [11],这与使用机器人代替人工在高危场所作业的初衷背道而驰。另外,火灾等救援现场分秒必争,这两种机器人位置变换方法非常费时,这容易为火灾等高危环境下的抢救贻误“战”机。
现有的消防机器人绝大多数侧重于如何提高机器人的越障性能、承载性能上等问题,而忽略了最重要的在后方充满水的水带负载下如何提高机器人方位灵活变换和快速机动部署问题。目前,市面上尚未出现就如何提高机器人在工作一段时间后,如何拖动充满水带进行转弯等方位变换的实际用途进行的研究或试验。因此,本文提出一种基于方位实时变换的新型消防灭火机器人,可用于高温、有毒作业等事故现场的特殊环境,它能在后方水带充满水的情况下快速进行位置和角度变换,有效节省救援现场设备就位时间,提高机器人部署的灵活性。
2. 消防灭火机器人控制算法
消防灭火机器人控制水带主动位移机构、水带被动位移机消防灭火机器人系统工作一段时间后,消防水带内充满水,此时履带式移动平台已经无法进行灵活移动实现构实现对充满水的消防水带进行方位实时变换的具体步骤如下:
Step1:消防灭火机器人中的控制和通讯模块通过无线通讯将控制指令发送至每个水带主动位移机构中的通讯模块上,控制模块接收到控制指令后,进行统一动作实现。
Step2:每个水带主动位移机构中控制模块控制转向电机转动,从而带动移动轮实现同步角度转换,实现对移动轮前进或后退方向的调整。
Step3:根据消防灭火机器人对后方水带的移动位置要求,每个水带主动位移机构中的转向电机转动角度可不同、转动方向也可不同,从而实现每个水带主动位移机构中的全向移动轮系运动方向不同;同时控制模块还可控制每个水带主动位移机构中的驱动电机转动行程不同,从而实现不同的水带主动位移机构中全向移动轮系移动的位置不同;最终,水带主动位移机构可实现不同方位的布置,进而带动水带主动位移机构所连接的水带实现方位的调整。
Step4:在水带主动位移机构进行位置调整时,当每一节充满水的水带中央的水带主动位移机构进行方位调整时,位于水带接头上的水带被动位移机构会被动的进行位移调整。最终可实现对整条消防水带的方位调整,当消防水带方位调整完毕过程中,消防灭火机器人便可进行配合实现方位调整,消防灭火机器人以及后方充满水的消防水带便可完成机动性的方位调整功能。
3. 消防灭火机器人设计
消防灭火机器人是基本载体,所有的控制元件及行走驱动机构均安装在机器人壳体内。机器人本体的主要作用是实现机器人在高危环境下的移动拖动水带运动功能,同时还可利用其上装的消防水炮进行定点喷射消防灭火。机器人本体包括四部分(图1):履带式移动平台、消防水炮、控制和通讯模块、位移机构载体。每个部分的功能如下:
(1) 履带式移动平台上端前方设置消防水炮,上端后方设置位移机构载体,内部设置控制和通讯模块。履带式移动平台在消防水带未充水阶段,可实现前进、后退、转弯等移动功能,从而拖动后方水带进行位置部署。
(2) 消防水炮设置在履带式移动平台的前方,是灭火的核心设备,可实现炮头的角度、喷射方式调整,从而实现定点、定量水流喷射。消防水炮还包括固定在炮管连接后方水带的水带接口,用以连接消防水带。
(3) 控制和通讯模块设置在履带式移动平台的内部,主要实现对履带式移动平台、消防水炮的控制功能,还可实现与上位机通讯、与水带主动位移机构、水带被动位移机构的通讯功能。
(4) 位移机构载体由铁板组成的方形壳体结构,内部中空,固定在履带式移动平台的后方,用以盛放水带主动位移机构和水带被动位移机构。
3.1. 结构设计
基于方位实时调整功能的消防灭火机器人系统主要包括:消防灭火机器人、消防水带、水带主动位移机构和水带被动位移机构四部分(如图2所示)。水带主动位移机构包括全向移动轮系、水带抱紧装置,全向移动轮系可实现全方位移动,水带抱紧装置可实现对水带的抱紧和分离。水带被动位移机构还包括水带接口抱紧装置,该装置的主要功能是可实现被动的对水带接头的抱紧和分离。水带主动位移机构还可实现对水带被动位移机构的吸附等功能。水带主动位移机构、水带被动位移机构组成级联系统可实现对水带方位变换。
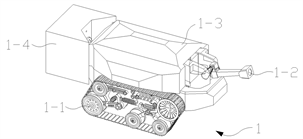
Figure 1. Schematic diagram of the shape and structure of the fire-fighting robot. Among them, 1-1 is the tracked mobile platform, 1-2 is the fire water cannon, 1-3 is the control and communication module, and 1-4 is the carrier of displacement mechanism
图1. 消防灭火机器人的外形结构示意图。其中1-1为履带式移动平台,1-2为消防水炮,1-3为控制和通讯模块,1-4为位移机构载体

Figure 2. Schematic diagram of overall shape structure. Among them, 1 is fire extinguishing robot, 2 is fire hose, 3 is hose active displacement mechanism, 4 is hose passive displacement mechanism
图2. 整体外形结构示意图。其中1为消防灭火机器人,2为消防水带,3为水带主动位移机构,4为水带被动位移机构
3.2. 消防水带设计
消防水带两侧连接有水带接头,不同水带间的水带结构可相互连接,从而实现水带的延长。水带最前端的水带接头与消防水炮上的水带接口配合连接,水带最后端的水带接头与消防车高压泵出口连接。消防水带主要起到连接消防车与所述消防灭火机器人并实现水流传递的功能。
3.3. 水带主动位移机构设计
水带主动位移机构如图3所示,主要包括四部分:主动位移平台本体、全向移动轮系、水带接口抱紧装置、电气组件。全向移动轮系用于水带的全方位移动,水带抱紧装置用于对水带的抱紧和分离。水带主动位移机构主要实现的功能有:(1) 在充满水的消防水带上自主移动功能;(2) 自主实现穿越水带接头的功能;(3) 带动水带被动位移机构移动的功能;(4) 实现将水带被动位移机构在水带上布放的功能。
3.4. 水带被动位移机构设计
水带被动位移机构如图4所示,主要包括:被动位移平台和水带接口抱紧装置。被动位移平台和主动位移平台相似,为平板结构,宽度较窄。被动位移平台下部横向排列上镶嵌有两颗被动滚轮,被动滚轮为圆球状,可实现在被动位移平台部原位滚动,当被动位移平台任意一侧受力后,实现被动滚轮相对地面的滚动摩擦功能。水带被动位移机构的整体功能为:被动位移平台可实现随充满水的水带作用下移动的功能,而水带接口抱紧装置可实现对水带接头或充满水后的水带的抱紧功能。
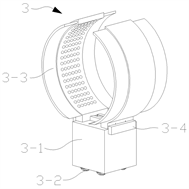
Figure 3. Schematic diagram of active displacement mechanism of hose. Among them, 3-1 is a flat structure, 3-2 is an omni-directional moving gear train, 3-3 is a hose tensioning device, and 3-4 is an electrical component
图3. 水带主动位移机构的结构示意图。其中3-1为平板结构,3-2为全向移动轮系,3-3为水带抱紧装置,3-4为电气组件
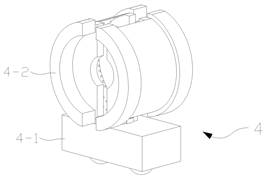
Figure 4. Schematic diagram of passive displacement mechanism of hose. Among them, 4-1 is the passive displacement platform, and 4-2 is the hose interface clamping device
图4. 水带被动位移机构的结构示意图。其中4-1为被动位移平台,4-2为水带接口抱紧装置
4. 消防灭火机器人实验结果

Figure 5. Near picture of fire fighting robot
图5. 消防灭火机器人近图

Figure 6. Working diagram of fire-fighting robot
图6. 消防灭火机器人工作图
该消防灭火机器人水带主动位移机构的全向移动轮系可实现全方位移动,还可实现对水带被动位移机构的吸附功能,避免了机器人因二次位置部署导致的水带摘除和排水等难题,有效提高消防机器人快速部署和方位变换效率。
5. 结束语
本文设计实现了一种具备方位实时调整功能的消防灭火机器人系统,采用水带主动位移机构和水带被动位移机构实现对消防机器人后方充满水的水带进行位置变换,可极大地降低机器人因进行位置部署造成的时间浪费问题,提高机器人部署的机动性,避免了机器人因二次位置部署导致的水带摘除和排水等难题,降低人工作业受伤的风险,有效提高高危现场的救援效率。
基金项目
本文受山东省自然科学基金项目(ZR2017BF043)和山东省大学生创新训练项目(S201910429098)资助。
文章引用
颛孙盈,刘月锟,张 森,刘秀燕. 基于方位实时调整功能的消防灭火机器人系统设计
Design of Fire Fighting Robot System Based on Azimuth Real-Time Adjustment[J]. 计算机科学与应用, 2020, 10(02): 208-213. https://doi.org/10.12677/CSA.2020.102022
参考文献
- 1. 倪银堂, 吕迪洋, 王振豪. 消防机器人的研究现状综述与展望[J]. 自动化应用, 2017(2): 28-29.
- 2. 党海昌. 消防机器人在我国灭火救援中的应用现状和前景分析[J]. 消防技术与产品信息, 2016(3): 69-71.
- 3. 孙宁, 裴文良, 闵桂元, 王永军. 消防灭火机器人设计及应用[J]. 消防科学与技术, 2018, 37(7): 942-944.
- 4. 刘锴圣, 黄民. 基于STM32的消防灭火机器人控制系统设计与研究[J]. 轻工科技, 2018, 34(1): 70-71.
- 5. 刘军, 程继国, 尹志, 沈耀宗. 消防机器人灭火救援应用技术分析[J]. 消防技术与产品信息, 2010(11): 16-19.
- 6. 刘群, 石银霞, 张珏, 徐研. 可自动更换灭火弹的消防机器人应用研究[J]. 电工技术, 2019(2): 110-112.
- 7. 孙胜利. 浅谈消防机器人及其运用[J]. 消防界(电子版), 2018, 4(21): 61-63.
- 8. 陈庆暖. 消防灭火机器人及其应用[J]. 消防科学与技术, 2018, 37(5): 644-646.
- 9. 杨建德. 基于DSP的灭火机器人控制系统的设计[D]: [硕士学位论文]. 合肥: 合肥工业大学, 2018.
- 10. Kim, J.H. and Lattimer, B.Y. (2015) Real-Time Probabilistic Classification of Fire and Smoke Using Thermal Imagery for Intelligent Firefighting Robot. Fire Safety Journal, 72, 40-49. https://doi.org/10.1016/j.firesaf.2015.02.007
- 11. Zhang, G.Y., Liu, F.L., Li, J.X., et al. (2014) Intelligent Fire-Fighting Robot Based on STM32F103. Microcontrollers & Embedded Systems, 14, 73-75.
NOTES
*通讯作者。