Smart Grid
Vol.
08
No.
06
(
2018
), Article ID:
27764
,
11
pages
10.12677/SG.2018.86055
Research on the Operation Characteristics of Hybrid DC Asynchronous Interconnection System
Han Yan, Rui Song, Shichang Zhao, Xuan Wang, Chunlai Li, Jia Yang, Shaofei Wang
Power Research Institute of Qinghai Power Grid Company, Xining Qinghai

Received: Nov. 6th, 2018; accepted: Nov. 21st, 2018; published: Nov. 28th, 2018

ABSTRACT
Hybrid DC asynchronous interconnection system combines the advantages of LCC-HVDC and VSC-HVDC to provide a more flexible power grid interconnection mode. Firstly, this paper analyzes the circuit and control system of the LCC-HVDC and VSC-HVDC units. Then based on PSCAD/EMTDC simulation platform, a hybrid DC asynchronous interconnection simulation system is built to study the steady, dynamic, transient and fault recovery characteristics of hybrid DC asynchronous interconnection system. Finally, according to the research results, a measure to improve the voltage stability and fault recovery characteristics of LCC-HVDC system is proposed. The results show that hybrid DC asynchronous interconnection system has good steady-state and dynamic response. At the same time, hybrid DC asynchronous interconnection system can effectively improve the voltage support capability of the receiving grid by the excellent control characteristic of MMC-HVDC. More importantly, it can restrain the commutation failure of the LCC-HVDC station, improve the fault recovery characteristics of the AC/DC system and increase the reliability of the LCC-HVDC system.
Keywords:Hybrid DC Asynchronous Interconnection, LCC-HVDC, MMC-HVDC, Operation Characteristics, Commutation Failure, Fault Recovery
混合直流异步联网系统运行特性研究
闫涵,宋锐,赵世昌,王轩,李春来,杨嘉,王少飞
青海省电力公司电力科学研究院,青海 西宁
收稿日期:2018年11月6日;录用日期:2018年11月21日;发布日期:2018年11月28日

摘 要
混合直流异步联网系统结合了常规直流和柔性直流各自的优势,提供了一种更为灵活的电网互联方式。本文首先对常规直流单元和柔性直流单元主回路与控制系统进行分析。继而基于PSCAD/EMTDC仿真平台,搭建混合直流异步联网仿真系统,研究混合直流异步联网系统的稳态、动态及暂态特性,分析混合直流异步联网系统故障恢复特性。最后根据研究结果提出改善常规直流单元电压稳定性及故障恢复特性的措施。研究结果表明:混合直流异步联网系统不仅具有良好的稳态及动态响应,而且可以利用柔性直流单元优越的控制性能,增强受端电网的电压支撑能力,更为重要的是能够减小常规直流单元换相失败的概率并改善交直流系统故障恢复特性,提高常规直流输电运行的可靠性。
关键词 :混合直流异步联网,常规直流单元,柔性直流单元,运行特性,换相失败,故障恢复

Copyright © 2018 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
近年来,随着高压直流(High Voltage Direct Current, HVDC)输电工程的蓬勃发展,交直流并列和多直流馈入(Multi-infeed Direct Current, MIDC)的电网结构逐渐形成,电网安全稳定运行面临着诸多问题与挑战 [1] 。交直流并列系统直流故障闭锁引起的潮流转移问题将使电网存在大面积停电的风险,解决这一问题最有效的做法是实现送端与受端电网异步联网 [2] 。MIDC输电系统一回出现换相失败会对馈入同一受端电网的其他回直流产生影响,严重时可能引起输送功率中断,导致整个系统的潮流大范围转移和重新分布,对故障清除后受端电网电压和直流功率的恢复造成恶劣影响,严重威胁交直流系统的安全稳定运行,柔性直流输电技术可以有效解决这一问题。柔性直流输电采用可关断器件(通常为IGBT)和高频调制技术,通过调节换流器与系统电压间的功角差和换流器电压幅值独立控制有功和无功,不需要无功补偿,不存在换相失败 [3] 。
2016年南方电网依托观音岩直流和鲁西背靠背直流工程实现了云南电网与南方电网的异步联网优化电网结构,将快速的功角稳定问题转化为较易预防的送端频率稳定问题和受端电压稳定问题,大大降低了电网大面积停电的危险。综合比较经济、占地、技术、工程示范意义等问题后,鲁西背靠背直流工程开创性地采用了基于电网换相换流器的高压直流输电系统(以下简称“常规直流单元”)和基于电压源型换流器的高压直流输电系统(以下简称“柔性直流单元”)并联形成混合直流异步联网系统。本文针对世界首个并联混合直流异步联网系统,分别对常规直流单元和柔性直流单元主回路与控制系统进行分析,并基于PSCAD/EMTDC仿真平台建立混合直流异步联网系统仿真模型。研究混合直流异步联网系统的稳态、动态及暂态特性,并对常规直流单元的故障恢复特性进行分析。研究结果表明混合直流异步联网系统具有良好的稳态及动态响应,能够减小常规直流单元换相失败概率并改善交直流系统故障恢复特性,提高常规直流输电运行的可靠性。
2. 常规直流单元主回路及控制系统
混合直流异步联网系统采用常规直流单元与柔性直流单元并联结构,常规直流单元采用12脉动换流器,柔性直流单元采用模块化多电平换流器(Modular Multilevel Converter, MMC)。混合直流异步联网系统结构如图1所示。

Figure 1. Diagram of hybrid DC asynchronous interconnection system
图1. 混合直流异步联网系统结构示意图
常规直流单元整流侧与逆变侧均采用一个12脉动换流器,在逆变侧12脉动换流器中点(2个6脉动换流器之间)接地。换流变压器采用单相三绕组变压器,平波电抗器采用油浸式平波电抗器,交流滤波器分为A型11/24双调型滤波器和B型13/36双调型滤波器,其主回路结构如图1所示。
常规直流输电控制系统一般采用分层结构 [5] ,分为系统控制级,换流器控制级和换流阀控制级。系统控制级接收调控中心的控制指令,通过运算向换流器控制级发送直流电流指令,经换流器控制级运算后发送触发角指令给各个换流阀控制单元 [6] 。在换流器控制级中,整流器配有带αmin限制的定电流控制;逆变器配有定电压控制、定电流控制和AMAX控制。其中定电流控制的电流整定值来自于低压限流(Voltage Dependent Current Order Limiter, VDCOL)环节。图2为常规直流单元换流器控制级的基本控制特性。

Figure 2. Control characteristics of LCC-HVDC
图2. 常规直流单元控制特性
图2中粗线和细线分别代表整流器和逆变器的控制特性。CC代表定电流控制,CEA代表定关断角控制。整流器αmin限制限定了整流器最小触发角为5˚,逆变器αmin限制的作用是防止逆变器进入整流状态 [7] 。整流器和逆变器通过电流裕度控制原则进行协调配合,二者的电流整定值均来自于VDCOL环节。VDCOL环节可以实现故障情况下电流整定值随着直流电压的变化而变化的功能,从而达到低压限流的目的 [8] 。定γ角控制从整流侧看为一负阻抗,不利于闭环电流控制器的稳定运行,因此逆变器控制特性加入一段正斜率的线段形成AMAX控制。同时当受端电网较弱时,逆变器采用定电压控制将更有利于受端电网的电压稳定,有助于减小换相失败发生的几率 [9] 。
3. 柔性直流单元主回路及控制系统
由于背靠背直流系统发生直流故障的概率极低,柔性直流单元采用不具备直流侧故障自清除能力的半桥子模块级联组成模块化多电平换流器MMC (图3)。MMC控制系统采用内环定电流、外环定直流电压/定有功结合定交流电压/定无功的控制方式 [10] 。
3.1. 内环控制

Figure 3. Topology structure diagram of MMC-HVDC
图3. MMC拓扑结构示意图
对k(a, b, c)相相单元中的上、下桥臂分别应用KVL定律,可以得到
(1)
其中,R0表示桥臂等效内阻;ekp、ekn分别表示上下桥臂的等效电动势,在桥臂电流的作用下形成电压ukp、ukn。由于相单元的对称性,直流电流Idc在三个相单元之间平均分配 [11] ,每个相单元中的直流电流为Idc/3。又由于上、下桥臂的桥臂电抗L0相等,所以k相交流电流ik在上下桥臂间均分,即k相上、下桥臂的电流分别为
(2)
将式(1)与式(2)联立,且令 ,得
(3)
其中ek为k(a, b, c)相单元的交流电动势,式(3)描述了相单元的可控电动势ek与该相交流侧电压电流的关系。对式(3)施以派克变换和拉普拉斯变换,得
(4)
其中id、iq为被控变量,ed、eq为控制变量,ud、uq为扰动变量。图4是MMC内环控制框图。

Figure 4. Internal loop control block diagram of MMC
图4. MMC内环控制框图
3.2. 外环控制
外环控制接收系统控制级的有功和无功类控制量参考值,为内环电流控制提供电流参考值 [12] 。常用的外环控制方式包括有功功率类控制(定有功功率控制、定直流电压控制、定频率控制)和无功功率类控制 [13] (定无功功率控制和定交流电压控制)。为保证直流电压稳定和有功功率平衡,柔性直流输电必须一端换流站采用定直流电压控制,另一端采用定有功功率控制或定频率控制 [4] 。图5为外环控制的基本框图。

Figure 5. Outer loop control block diagram of MMC
图5. MMC外环控制框图
图中Aref、Bref分别为有功、无功功率类参考值,Am、Bm为有功、无功功率类测量值,Kpd、Kid、Kpq、Kiq为外环有功功率类及无功功率类PI控制器的参数。为了得到交流系统送入MMC的有功及无功功率与交流电流ik的关系,本文进行了如下推导。将式(4)分解为正序和负序分量两个子系统
(5)
(6)
不含零序分量的不对称三相电压uk可以用两个正交的正序和负序分量表示
(7)
其中
(8)
同理
(9)
(10)
(11)
可得
(12)
式中
(13)
从式(12)可以看出由于电压不平衡,有功功率及无功功率中将出现二倍频波动分量。稳态( )且负序电流分量得到抑制时,交流系统送入MMC的有功和无功功率直流分量可以表示为
(14)
4. 混合直流异步联网系统运行特性研究
基于鲁西背靠背直流工程实际参数,本文在PSACD/EMTDC仿真软件中建立混合直流异步联网系统仿真系统,对混合直流异步联网交直流系统稳态、动态及暂态特性进行仿真分析。
4.1. 稳态特性
稳态运行结果如图6所示。由图6可见,稳态运行时,混合直流异步联网系统中常规直流单元和柔性直流单元均保持理想的稳定运行状态。常规直流单元和柔性直流单元在运行一定时间后直流电压电流、有功和无功、交流母线电压等电气量输出波形稳定,符合工程实际。
 (a) 常规直流单元整流侧 (b) 常规直流单元逆变侧
(a) 常规直流单元整流侧 (b) 常规直流单元逆变侧 (c) 柔性直流单元整流侧 (d) 柔性直流单元逆变侧
(c) 柔性直流单元整流侧 (d) 柔性直流单元逆变侧
Figure 6. Steady-state operating curve of hybrid DC asynchronous interconnection system
图6. 混合直流异步联网系统稳态运行波形
4.2. 动态特性
电流阶跃响应反映了混合直流异步联网系统的动态响应性能。针对柔性直流单元停运和投运两种运行方式,在t = 2 s将常规直流单元定电流指令减小0.1 pu,持续1 s后恢复,逆变侧直流电流的波形如图7所示。阶跃响应表现为电流指令下降0.1 s后,直流电流快速跌落至0.9 pu。在电流指令突降瞬间柔性直流单元停运时直流电流发生了持续0.2 s左右的小幅震荡,随后两种运行方式下的直流电流均稳定在0.9 pu。电流指令恢复至1.0 pu后,经过0.1 s,直流电流恢复正常额定值。由此可见,两种运行方式下常规直流单元的特性相似,然而柔性直流单元投运时常规直流单元动态响应特性更佳,混合直流异步联网系统具有良好的动态特性。

Figure 7. Current step response of LCC-HVDC
图7. 常规直流单元电流阶跃响应
4.3. 暂态特性
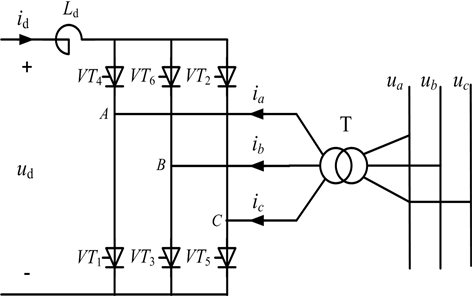
Figure 8. Schematic of 6 pulse inverter
图8. 6脉动逆变器原理图
限于篇幅,本文仅给出受端电网发生单相接地故障的仿真结果。假设受端电网A相接地,混合直流异步联网系统稳定运行至t = 2.0 s故障发生,持续0.06 s后清除。仿真结果如图9所示,图9(a)中从上至下依次为常规直流单元逆变侧换相电压Uac、阀电流Ivy、阀电压Uvy、Y桥网侧电流Iy1和Y桥阀侧电流Iy2。图9(b)中从上至下依次为柔性直流单元逆变侧换流母线电压有效值UacI_rms、有功功率Pac_I和逆变器吸收的无功功率Qv-I。
如图8所示,以6脉动逆变器为例说明常规直流单元故障期间的换相情况。当VT4的触发脉冲发出时,VT2开始向VT4换相,t = 2.0 s时换相结束,VT3与VT4导通。随后VT3换相至VT5,VT4开始向VT6换相,由于换相电压幅值降低,使VT4未能完成向VT6换相,逆变器发生一次换相失败,之后VT4继续导通,VT6电流则逐渐减小至零。当VT1触发脉冲来临时,VT5向VT1成功换相,此时由于VT1与VT4形成旁通对,相当于直流线路末端短路,直流电流迅速增加。由此可见,受端电网故障时常规直流单元发生换相失败,直流电流上升,直流电压下降。
柔性直流单元故障期间,逆变侧换流母线电压在t1 = 2.05 s时跌落至最低值为0.72 pu,输送有功功率最低跌至0.77 pu,输出无功功率最大达0.2 pu;随着t2 = 2.06 s时故障切除,柔性直流单元输送的有功功率和输出的无功功率出现波动,在t3 = 2.08 s左右柔性直流单元发出最大无功0.4 pu输送有功达到0.38 pu,在t4 = 2.12 s输送有功功率增至最大值1.56 pu发出0.24 pu的无功,随后有功功率逐渐恢复至额定值,逆变器输出的无功经过数次减幅振荡恢复正常。由此可见,受端电网故障时柔性直流单元输送功率不会发生中断,并且能够向交流系统输送无功功率,为换流母线电压提供无功支撑。
 (a) 常规直流单元单相接地故障波形
(a) 常规直流单元单相接地故障波形 (b) 柔性直流单元单相接地故障波形
(b) 柔性直流单元单相接地故障波形
Figure 9. Waveforms of hybrid DC asynchronous interconnection system when occurs single phase fault in AC system
图9. 混合直流异步联网系统交流单相接地故障仿真波形
5. 混合直流异步联网系统故障恢复特性研究
当受端电网强度较弱时,常规直流单元换相失败后交流系统无法提供常规直流单元恢复所需要的无功 [14] ,将再次造成换流母线电压跌落,逆变器将发生后继换相失败,进一步延缓常规直流单元的恢复速度,最终常规直流单元将因多次换相失败无法恢复而导致振荡闭锁 [15] 。因此常规直流馈入弱交流系统时,应该配备必要的动态无功补偿设备 [16] 。4.3节的研究结果表明,混合直流异步联网系统受端电网故障时,常规直流单元发生换相失败,而柔性直流单元在故障期间能够为常规直流单元提供动态无功支援,抑制换流母线波动,在一定程度上改善了常规直流单元的故障恢复特性。
为了更清晰地研究柔性直流单元对常规直流单元故障恢复特性的影响。本文分别对受端电网单相接地故障时,柔性直流单元停运及投运情况下的常规直流单元直流功率Pd的变化进行研究,如图10所示。
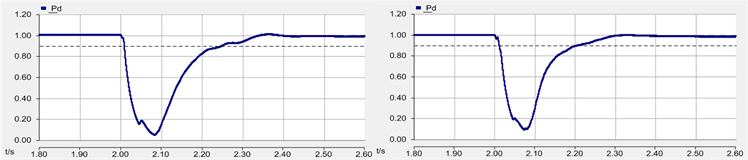 (a) 柔性直流单元停运 (b) 柔性直流单元投运
(a) 柔性直流单元停运 (b) 柔性直流单元投运
Figure 10. DC transmission power waveforms of hybrid DC asynchronous interconnection system when occurs single phase fault in AC system
图10. 受端电网单相接地故障时直流输送功率仿真波形
由图10可见,柔性直流单元停运时,直流功率有较大下降,常规直流单元恢复较慢,t = 2.23 s时直流功率从0恢复至0.9 pu;当柔性直流单元投运时,直流功率下跌水平较停运时稍小,在t = 2.20 s时直流功率恢复至相同的功率水平。由此可得柔性直流单元在交流系统出现故障时可以起到静止同步补偿器(Static Synchronous Compensator, STATCOM)的作用,提高换流母线电压支撑能力,向常规直流单元提供无功支援,有助于常规直流输电系统的故障恢复,减少换相失败对交流系统的冲击,提高交直流系统的暂态稳定性。因此当混合直流异步联网系统馈入弱交流系统时,稳态时可以利用柔性直流单元与换流站无功补偿设备协调配合,需要投入无功补偿设备时优先采用柔性直流单元进行无功补偿,减少无功分组投切次数;暂态时利用柔性直流单元向常规直流单元提供动态无功补偿,降低常规直流单元换相失败概率,改善交直流系统故障恢复特性。
6. 结论
本文基于PSCAD/EMTDC仿真平台搭建了混合直流异步联网系统仿真系统,研究其稳态、动态、暂态及故障恢复特性,得到以下主要结论:
1) 混合直流异步联网系统创新性地采用常规直流单元与柔性直流单元并联结构,实现电网间异步联网,具有良好的稳态和动态特性,与工程实际相符;
2) 当受端电网故障时,常规直流单元发生换相失败,柔性直流单元能够起到STATCOM的作用,减小常规直流单元换相失败严重程度,提高常规直流输电运行可靠性,采用混合直流异步联网结构能够充分发挥柔性直流单元的优势;
3) 当混合直流异步联网系统馈入弱交流系统时,可以通过柔性直流单元无功控制改善常规直流单元电压稳定性及故障恢复特性。稳态时利用柔性直流单元与换流站无功补偿设备协调配合,优先采用柔性直流单元进行无功补偿,减少无功分组投切次数;暂态时利用柔性直流单元向常规直流单元提供动态无功支援,降低常规直流单元换相失败概率,改善常规直流单元故障恢复特性。
综合上述,混合直流异步联网系统具有良好的稳态及动态响应,暂态时能够降低常规直流单元换相失败概率,改善其故障恢复特性,提高交直流系统的电压稳定性。
文章引用
闫 涵,宋 锐,赵世昌,王 轩,李春来,杨 嘉,王少飞. 混合直流异步联网系统运行特性研究
Research on the Operation Characteristics of Hybrid DC Asynchronous Interconnection System[J]. 智能电网, 2018, 08(06): 505-515. https://doi.org/10.12677/SG.2018.86055
参考文献
- 1. 赵婉君. 高压直流输电工程技术[M]. 第三版. 北京: 中国电力出版社, 2013: 7.
- 2. 周保荣, 洪潮, 金小明, 等. 南方电网同步运行网架向异步运行网架的转变研究[J]. 中国电机工程学报, 2016, 36(8): 2084-2092.
- 3. 徐政, 管敏渊. 柔性直流输电系统[M]. 北京: 机械工业出版社, 2013.
- 4. 许冬. 混合多端直流输电运行特性研究[D]: [博士学位论文]. 北京: 华北电力大学(北京), 2017.
- 5. 张东辉, 洪潮, 周保荣, 等. 云南电网与南方电网主网异步联网系统方案研究[J]. 南方电网技术, 2014, 8(6): 1-6.
- 6. 雷霄, 王华伟, 曾南超, 等. LCC与VSC混联型多端高压直流输电系统运行特性的仿真研究[J]. 电工电能新技术, 2013, 32(2): 48-52.
- 7. 姚文峰, 张勇, 洪潮, 等. 落点弱交流系统的直流输电系统运行特性及改善措施[J]. 南方电网技术, 2015, 9(4): 54-59.
- 8. 张岩坡. 利用STATCOM改善直流输电系统运行特性的基础研究[D]: [硕士学位论文]. 保定: 华北电力大学, 2013.
- 9. 汤广福, 罗湘, 魏晓光. 多端直流输电与直流电网技术[J]. 中国电机工程学报, 2013, 33(10): 8-17.
- 10. 汤广福, 贺之渊, 庞辉. 柔性直流输电工程技术研究、应用及发展[J]. 电力系统自动化, 2013, 37(15): 3-14.
- 11. 董云龙, 包海龙, 田杰, 等. 柔性直流输电控制及保护系统[J]. 电力系统自动化, 2011, 35(19): 89-92.
- 12. 李兴源, 曾琦, 王渝红, 等. 柔性直流输电系统控制研究综述[J]. 高电压技术, 2016, 42(10): 3025-3037.
- 13. 徐政, 刘高任, 张哲任. 柔性直流输电网的故障保护原理研究[J]. 高电压技术, 2017, 43(1): 1-8.
- 14. 陈博怡, 李兴源, 胡永银, 等. 混合直流输电控制策略研究[J]. 高压电器, 2016(1): 118-123.
- 15. 冯明, 李兴源, 李宽. 混合直流输电系统综述[J]. 现代电力, 2015, 32(2): 1-8.
- 16. 许烽, 宣晓华, 江道灼, 等. 常规直流输电系统改造用的混合直流输电技术[J]. 电网技术, 2017, 41(10): 3209-3215.