Mechanical Engineering and Technology
Vol.
13
No.
02
(
2024
), Article ID:
83970
,
6
pages
10.12677/met.2024.132009
自走式四轮植保机转向系统结构设计与研究
张泉1,李国慧1,黄清2,李博2
1南阳理工学院智能制造学院,河南 南阳
2河南省经济管理学校,河南 南阳
收稿日期:2023年12月19日;录用日期:2024年3月31日;发布日期:2024年4月7日

摘要
为适应目前低成本、高效率的四轮自走式植保机的转向系统需求。根据四轮自走式植保机的运动特性及结构特点,结合目前转向系统的优缺点以及万向轮的功用,设计出一种双轮驱动的万向轮转向系统,通过运动学理论分析和实践检验证明该结构满足要求,为自走式植保机械的进一步发展提供了动力。
关键词
植保机械,万向轮转向系统,双轮驱动,自走式

Structural Design and Research on Steering System of Self-Propelled Four-Wheel Plant Protection Machinery
Quan Zhang1, Guohui Li1, Qing Huang2, Bo Li2
1School of Intelligent Manufacturing, Nanyang Institute of Technology, Nanyang Henan
2Henan Economics and Management School, Nanyang Henan
Received: Dec. 19th, 2023; accepted: Mar. 31st, 2024; published: Apr. 7th, 2024

ABSTRACT
In order to meet the requirements of steering system of four-wheel self-propelled plant protection machine with low cost and high efficiency, according to the motion characteristics and structural characteristics of the four-wheel self-propelled plant protection machine, combined with the advantages and disadvantages of the current steering system and the function of the universal wheel, a two wheel drive universal wheel steering system is designed. The kinematic theoretical analysis and practical test show that the structure meets the requirements. And it provides power for the further development of self-propelled plant protection machinery.
Keywords:Plant Protection Machinery, Universal Wheel Steering System, Two Wheel Drive, Self-Propelled

Copyright © 2024 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着我国机械制造业的发展,人们对于环境生态、安全和健康等意识的提升,以及农业种植结构的调整,结合劳动力少的特点,使得现代化的植保机械使用越来越广泛。刘路设计了履带式作业车搭载弥雾机大面积均匀施药装备;张一星研究了使用电动车轮毂电机作业的两轮驱动的作业车;车延超设计了一款基于图像进行施药的变量喷洒的轮毂电机作业车;白如月等设计了一种在温室内的自动行走并均匀施药的施药机器人。以上各类植保机械都有自身的优点,然而在转向系统方面都没有深入阐述,论文根据现植保机的转向结构的优缺点,结合万向轮的特点,使用阿克曼转向原理,进行自走式四轮植保机转向系统结构设计 [1] [2] [3] [4] 。
2. 转向系统分析
目前四轮自走式植保机的转向结构类型有:四轮转向系统、两轮转向系统(前轮操纵转向),如图1所示;从转向特性分析,前轮转向操纵的两轮转向系统,后轮不转向,后轮通过差速器完成整车的转向,所以转向中心大致在后轴的延长线上;四轮转向一般对后轮进行逆向转向操纵,转向中心就比两轮转向车辆的超前,并靠近车体处。在前轮转向角相同时,四轮转向车辆的转向半径更小,所以转向性相比较好。但目前两轮转向系统需要刚性连接的转向驱动和差速结构,通过性以及结构上复杂;四轮转向系统控制复杂,稳定性差,二者在低速的高地隙自走式植保机械上都有自身的不足 [5] [6] [7] [8] 。
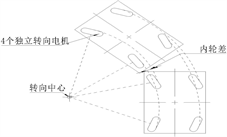
 (a) 两轮转向 (b) 四轮转向
(a) 两轮转向 (b) 四轮转向
Figure 1. Steering structure type of self-propelled plant protection machine
图1. 自走式植保机的转向结构类型
综合目前两轮转向系统和四轮转向系统的优缺点,一种制造成本低、控制简单及转向半径小的转向系统对四轮自走式植保机具有重要意义。
3. 万向轮系转向系统的结构及工作原理
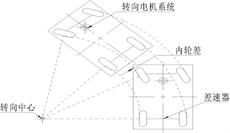
万向轮系四轮自走式植保机的底盘结构示意图如图2所示。
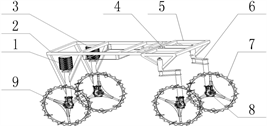
由图2可知万向轮系四轮自走式植保机的转向系统主要有主动驱动电机I、主驱动电机II、主副链接框架、万向轮系以及控制系统组合完成。由于植保机械行驶速度低,假设:车轮进行纯滚动运动;不考虑离心力以及转向时的载荷变化。建立其转向几何模型如图3所示 [9] [10] :
 1. 主动驱动电机I;2. 主框架;3. 主驱动电机II;4. 主副框架连接组件;5. 副框架;6. 万向轮偏心轴;7. 万向轮;8. 单边支撑传动箱;9. 单边支撑减速箱
1. 主动驱动电机I;2. 主框架;3. 主驱动电机II;4. 主副框架连接组件;5. 副框架;6. 万向轮偏心轴;7. 万向轮;8. 单边支撑传动箱;9. 单边支撑减速箱
Figure 2. Chassis structure of universal gear train four-wheel self-propelled plant protection machine
图2. 万向轮系四轮自走式植保机底盘结构
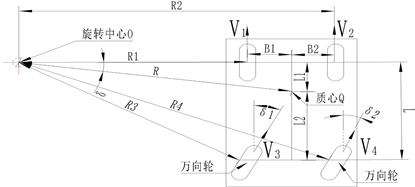
Figure 3. Steering principle of universal gear train four-wheel self-propelled plant protection machine
图3. 万向轮系四轮自走式植保机的转向工作原理
结合转向几何模型可知
(1)
根据瞬心定理:
(2)
(3)
当各个车轮的滚动半径 时。则有
(4)
其中 为车轮3转角, 和 是质心在到左右轮的垂直距离, 为前后轴距,由式(1)一式(4)可知,各转向轮的轮速比的大小与植保机行驶速度V的大小无关,只与车轮3转角 、轴距 、质心在到左右轮的垂直距离 和 有关;由于后两轮是万向轮系,因此,植保机需要差速转向时,只需控制两个驱动轮转速 、 转速,即可实现安全转向。
根据图3可知车轮1和车轮2的轴线共线,结合瞬心定理,植保机械的瞬心O的运动轨迹和车轮1和车轮2的轴线重合。则有:
(5)
其中 为植保机械相对于轮1的相对角速度,由公式(5)可知:
1) 当 时, ,整车重心O的线速度 ,此时万向轮在自身接地点的摩擦力作用下,保持方向不变,机车作直线运动;
2) 当 时, ,车轮1和车轮2的轴线的中心处 ,此时机车绕车轮1和车轮2的轴线的中心点转动。万向轮在自身接地点的摩擦力距作用下,绕立轴自动偏转,实现转向功能,理论上此时机车转弯半径较小;
3) 当 时,此时万向轮在自身接地点的摩擦力距作用下,绕立轴自动偏转,实现转向功能,理论上此时机车绕某一固定点做旋转运动。
从上面分析可以看出,通过操纵无线遥控器,控制机车的两个驱动轮的转速变化,实现机车的全方位转向,达到了目前两轮转向系统和四轮转向系统的优点组合。
4. 万向轮结构设计
万向轮又称自位轮是利用接地点的摩擦力对轮架立轴偏距所造成的力矩使其绕立轴自动偏转,以获得与其它轮子协调一致的回转中心,其偏心距直接决定着自位轮的回转性能和使用寿命;由于为减少杂物的缠绕,目前四轮自走式植保机轮子一般采用单边支撑式,其结构示意图如图4所示。由图4可知基于单边的原因,为保持运行的稳定性,四轮自走式植保机万向轮系,除了偏心距参数外,在行进时万向轮系的偏心轴中心剖面1和轮子轴向中心剖面2之间存在参数夹角B。因此,万向轮系结构设计除了一般的偏心距外还要包含参数B。
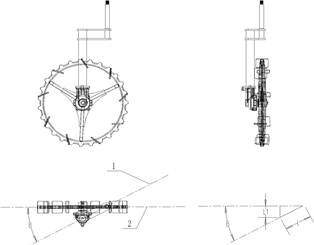 1. 偏心轴对称剖面;2. 车轮轴向剖面
1. 偏心轴对称剖面;2. 车轮轴向剖面
Figure 4. Structure diagram of universal wheel
图4. 万向轮结构简图
偏心距L及参数B的确定
由图4可知:
(6)
其中 为万向轮电机安装轴线到轮子轴向中心剖面的垂直距离是实常数;根据结构设计的安全稳定条件:
(7)
其中 为万向轮的最大载荷; 为抗弯截面系数。根据公式(6)和(7)结合整车结构尺寸,可以确定偏心距L及参数B的大小。
5. 样机性能试验
为了进一步验证植保作业车的转向设计是否满足要求,进行了样机试验,主要对作业车直线性、转向性能进行测试。实验场地在农田如下图5所示。样车进行匀速、加速、减速直线行走,观察转向的灵活性和直线的稳定性;样车以2 km/h的速度在地面上低速转向,自转一圈,利用卷尺测量外侧轨迹是否和设计转弯半径一致。

Figure 5. Field test
图5. 现场试验
根据实测转向直线性较为稳定灵活,受地形的限制直线稳定性有一定的局限。利用卷尺测得样车的最小转弯半径约为1100 mm,与实际设计的最大转向角为85˚,最小轮距1000 mm的转弯变径需求基本一致,即基本实现了原地转向。通过以上的实验分析,万向转向系统基本达到实际需求。
6. 结论
通过实践,此次设计的植保机械转向结构满足实际需要。且万向轮转向系统用电子控制系统代替了传统的转向器与车轮之间的机械刚性连接,直接用控制信号驱动电机来实现转向。节省了空间、成本,提高了传动效率。
基金项目
河南省科技计划项目(182107000037),南阳市科技局2021科技攻关项目,2021年南阳市级科技计划项目(KJGG103)。
文章引用
张 泉,李国慧,黄 清,李 博. 自走式四轮植保机转向系统结构设计与研究
Structural Design and Research on Steering System of Self-Propelled Four-Wheel Plant Protection Machinery[J]. 机械工程与技术, 2024, 13(02): 79-84. https://doi.org/10.12677/met.2024.132009
参考文献
- 1. 林立恒, 侯加林, 吴彦强, 等. 高地隙自走式喷雾机电控液压转向系统设计[J]. 农机化研究, 2018, 40(6): 91-96.
- 2. 胡新德, 张东峰, 何军, 胡超, 白发. 防风式枸杞植保机的研制与试验[J]. 农机化研究, 2021, 43(1): 119-124 145.
- 3. 赵晨宇, 陈息坤. 差速转向农业专用AGV小车的设计与模糊控制研究[J]. 农机化研究, 2016(11): 123-127.
- 4. 燕亚民, 杨富营, 程祖国. 4CRZ-424型烟叶采收植保机行走装置的设计[J]. 中国农机化学报, 2019(5): 58-61 139.
- 5. 杜娟, 于明群, 陈艳普, 李敏, 金诚谦, 印祥. 高地隙植保机速度自动控制系统研制[J]. 中国农业大学学报, 2019(12): 104-110.
- 6. 刘艳芬, 黄士超. 智能果园植保机的设计与试验研究[J]. 农机化研究, 2020(4): 67-71 76.
- 7. 郑瀚, 陈军. 农用植保机喷施作业智能控制系统优化分析[J]. 农机化研究, 2021, 43(12): 203-206.
- 8. 李旭宇, 陈刚, 陈鹏飞. 双电机驱动电动汽车低速差速策略的试验研究[J]. 微电机, 2015, 48(10): 45-50.
- 9. 袁月. 两轮独立驱动电动汽车驱动控制研究[D]: [硕士学位论文]. 西安: 西安科技大学, 2017.
- 10. 王大山. 两轮独立驱动电动车驱动控制系统的研究[D]: [硕士学位论文]. 青岛: 青岛理工大学, 2015.