Software Engineering and Applications
Vol.
11
No.
06
(
2022
), Article ID:
58867
,
8
pages
10.12677/SEA.2022.116122
针对火箭弹的高度和空速数据采集技术研究
段誉,孙磊,张春富,辅小荣,王玲玲
盐城工学院机械优集学院,江苏 盐城
收稿日期:2022年10月17日;录用日期:2022年11月28日;发布日期:2022年12月8日

摘要
针对传统火箭弹采集手段不能满足实时数据采集与实现智能化的迫切需求,提出了一种基于MEMS传感器的数据采集技术,对飞行中的速度与高度进行实时采集与应用。将数据采集系统的原理进行分析,在不影响射击精度的前提下,通过主程序软件循环实现实时数据采集,并且设计箱体结构提高抗过载性能,具有重量轻、方便改造等优点。实验数据表明:该设计的高度误差不超过0.5 m,低速时的空速误差在0.5 m/s,高速时的空速误差在3 m/s以内,为装备实现智能化提供了可能。
关键词
MEMS传感器,火箭弹,数据采集,过载

Research on Altitude and Airspeed Data Acquisition Technology of Rocket
Yu Duan, Lei Sun, Chunfu Zhang, Xiaorong Fu, Lingling Wang
Mechanical Excellence College, Yancheng Institute of Technology, Yancheng Jiangsu
Received: Oct. 17th, 2022; accepted: Nov. 28th, 2022; published: Dec. 8th, 2022

ABSTRACT
Aiming at the urgent need for real-time data acquisition and intelligentization which cannot be met by traditional rocket acquisition methods, a MEMS sensor-based data acquisition technology is proposed for real-time acquisition and application of speed and altitude in flight. The principle of the data acquisition system is analyzed. On the premise of not affecting the shooting accuracy, real-time data acquisition is realized through the main program software cycle, and the box structure is designed to improve the anti-overload performance, which has the advantages of light weight and convenient transformation. Experimental data show that the height error of the design is less than 0.5 m, the airspeed error at low speed is 0.5 m/s, and the airspeed error at high speed is less than 3 m/s, which provides the possibility for intelligent equipment.
Keywords:MEMS Sensor, Rockets, Data Acquisition, Overload

Copyright © 2022 by author(s) and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/


1. 引言
火箭弹是一种依靠饱和攻击,以数量来打击敌军的武器。发射装置位于飞机和导弹之间,用于携带、控制和发射导弹,是连接飞机外挂物管理系统和导弹的纽带。检测火箭弹在射击过程中系统工作正常与实时记录火箭弹射击中进行相关数据的判定与修正尤为重要。随着军事科学的发展,需要设计一套数据采集系统来满足发射装置的保障和测试需求。目前,由于一些火箭弹未配备相应的数据采集系统,出现掉弹、远飞弹等情况,无法进行数据分析找出故障避免下次事故发生 [1]。市面上的火箭弹采集系统,价格高昂,体积庞大,在精准定位与实时修正方面尚有欠缺,一定程度上影响武器系统的作战效率。所以为提高系统的精度与反应速度,实现智能化数据采集与分析是非常重要的。
为了迎合市场与军用领域的需求,对其数据采集系统的性能也有了更高的要求 [2] [3] [4]。火箭弹飞行过程中周围的大气相对参数主要包括静压、总压、迎角、侧滑角、真空速、马赫数等。传统的数据采集系统体积较大、采集数量庞大,因此,本系统基于DSP处理器TMS320F28335及MEMS传感技术设计,对系统的软硬件进行分析,并设计低通滤波器来提高计算性能,实现火箭弹科学化、精确化管理。
2. 总体方案设计
现有的弹载系统受到了体积、重量、环境、过载等外部因素的限制,需要满足在不同的海拔情况下都能准确判断飞行速度是否满足要求 [5] [6] [7] [8] [9]。完整地的采集系统由传感器测量单元、大气总温传感器、攻角传感器和侧滑角传感器输入接口、单片机及其误差修正和补偿的解算部分程序、大气数据参数输出接口等组成。但是由于火箭弹的飞行特点,现有的系统受到了体积、重量、环境等外部因素的限制,所以本系统选取了飞行高度处的大气静压、大气动压作为主要输入参数。系统采用TMS320F28335作为主控制器,设计一种MEMS传感器作为弹载数据采集系统。其工作原理对静压、动压、温度的采集,将采集的数据进行误差补偿并通过公式计算得到相对高度值、指示空速、真实空速 [10] - [15],经过低通滤波器避免了由于外界不确定因素对数值的干扰,得到更精准的高度值与空速值,提高了弹载系统的测量精度。将滤波后的数值通过弹载无线输传系统传输到地面站,保障火箭弹飞行过程中的精确性性与可靠性。图1为所设计的弹载系统的系统框图。
2.1. 气压高度测量原理
气压高度的测量原理是根据测量飞行过程中的大气压,通过函数计算输入压力值,得到飞行的高度。根据火箭弹飞行的实际情况分析,基本在对流层飞行,飞行高度一般小于11,000 m,因此可以推断出火箭弹气压高度推算公式:
(1)
式中:H为测量得到的气压高度,单位m;PH为火箭弹的原始参数大气静压,单位为kPa;
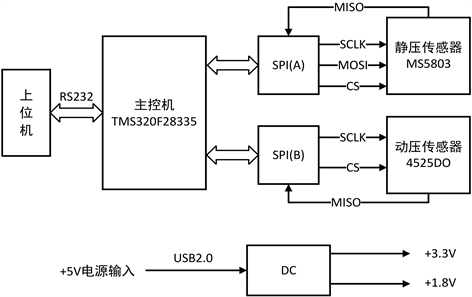
Figure 1. System block diagram of missile-borne system
图1. 弹载系统的系统框图
2.2. 气压空速测量原理
火箭弹飞行速度较低,并且在对流层飞行,所以设计的火箭弹数据采集系统并没有像传统的系统考虑马赫数和侧滑角等参数。即通过火箭弹在飞行过程中产生的大气动压函数解算得到指示空速和真实空速。
指示空速:又称表速,该测量原理是通过测量得到的动压(不考虑飞行高度),按照海平面标准大气压下的空速与动压之间的关系,得到当前的速度值。指示空速经过式2解算:
(2)
式中: 表示指示空速,单位km/h; 为大气动压,单位kPa。
真实空速:又称真空速,是表示火箭弹在飞行过程中相对于周围空气运动的速度。通过式3进行解算。
(3)
式中: 表示真实空速,单位km/h; 表示指示空速,单位km/h;H为气压高度,单位m。
3. 系统硬件设计
数据采集系统的硬件框图如图所示,硬件部分主要由压力数据采集模块和数字信号处理模块组成,其中压力数据采集模块是由MS5803静压传感器、4525DO动压传感器组成,数字信号处理模块采用TMS320F28335 DSP。TMS320F28335通过SPI总线与压力传感器相连接,数字式MS5803传感器采集压力值和温度值,数字式4525DO传感器采集动压值。数字信号处理单元将采集到的静压、动压、温度通过函数运算处理 [16] [17],并且对处理过后的数据进行低通滤波得到高精度的高度值、指示空速与真实空速,最后通过无线传输实时通信传输给地面站,以便于后续的数据处理与分析,硬件组成如图2所示。
根据火箭弹的智能化需求,对无人机所需要的必须参数高度、空速进行分析 [18] [19] [20],所设计的大气数据机载系统需要一个静压传感器和动压传感器。
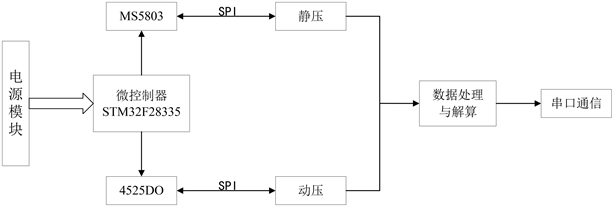
Figure 2. Hardware block diagram of missile-borne system
图2. 弹载系统硬件框图
静压传感器选取MS5803-01BA高精度数字式静压传感器,传感器体积小,精度高,响应速度快,能实时对高度进行测量,其分辨率可达10 cm。
动压传感器选取4525DO,该传感器测量精度高、误差小,并且内部采用最新的CMOS调节回路设计,14位压力和温度输出 [21]。传感器体积小,集成度高内部具有完全校准和温度补偿,补偿后的总误差小于1%。如图3所示,是数据采集过程中的原始值波特图。
 (a)
(a)
 (b)
(b)
Figure 3. Bode plot of static pressure and dynamic pressure acquisition
图3. 静压、动压采集波特图
在火箭弹发射过程中会产生巨大冲击力,采集电路常规设计可能使其发生破坏。如图4所示,是火箭弹的抗过载设计,抗过载设计采集电路板及器件采用HY-9025绝缘罐封硅胶置于密闭的盒体内,留有数据和电源接线,能满足抗过载的要求。
4. 软件设计仿真
为实现火箭弹数据采集系统的智能化、模块化,设计的主要功能包括数据实时采集、实时校准等。工作过程采用同步通信,实现高速度、大容量的数据传送。包括温度值和气压值(静压、动压)进行采样后进行转换成数字信号,数据处理程序是对输入信号即气压值采取温度补偿、压力补偿,低通滤波器对数据实时修正与校准等。主程序以循环方式进行,系统工作的流程与如图5所示。
在设计过程中,考虑到外部坏境、物理震动等原因导致数据波动大,采用低通滤波对信号进行处理。根据所设计的数据采集系统采样频率是10毫秒,设计带宽为1 HZ的数字低通滤波器,即转折频率 。实现过程如下:

Figure 4. Overload resistant design
图4. 抗过载设计

Figure 5. Software design flow chart
图5. 软件设计流程图
根据电路建立低通滤波器时域系统微分方程:
(4)
采用双线性变化对时域微分方程进行拉式变换:
(5)
最终差分方程如下式所示:
(6)
式中: 为滤波后值; 为上次滤波值; 为输入信号; 为上次输入信号。
下图为滤波前后的数据对比,图6为滤波前的数值,可以从图7中看出滤波后的噪音得到了明显的抑制。

Figure 6. Value before filtering
图6. 滤波前数值

Figure 7. Filtered value
图7. 滤波后数值
5. 实验数据分析
为测试火箭弹数据采集系统的性能,对数据系统进行动态测试。包括高度性能测试与空速性能测试。
受实验条件限制,采用模拟传感器输入的方法在一定的高度和空速范围内进行了实验。把由大气数据表得出的真实大气数据与本文数据采集系统测量数值算出的。在测试过程中,高度以海拔高度测量结果作为理论值。通过飞行试验,对系统的数据进行解析,图8为高度值动态测试,测量的高度值与实际高度值误差不超过0.5 m,气压高度采集系统误差主要由传感器本身误差电路误差和解算误差造成(图9)。
经过系统传感器温度补偿、软件滤波、二次补偿,使得低速时采集到的空速数据波动稳定在0.5 m/s以内;在高速运动时会长生偏移量等误差,采用软件滤波、解算高度空速等,使其波动在3 m/s以内图10为高速时的空速,空速测量精度能够满足系统设计的需求。

Figure 8. Height value dynamic test
图8. 高度值动态测试
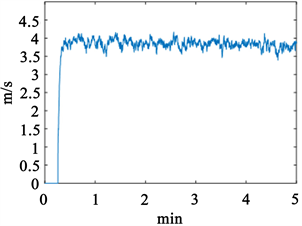
Figure 9. Low speed airspeed measurements
图9. 低速空速测量值

Figure 10. High speed airspeed measurements
图10. 高速空速测量值
6. 结语
综上所述,本文基于高精度、智能化、低成本的设计需求,主控机选用嵌入式高速数字信号处理芯片和精准度高的MEMS传感器,并采用误差补偿、低通滤波器的设计提高了测量精度。设计箱体结构与缓解碰撞时的冲击力,提高抗过载性能。实验结果表明,该系统抗过载能力强,能够实时准确记录各项数据且保证数据可靠准确,能够满足系统的应用需求。同时,该设计还可应用于飞行系统导航与控制,实用性强。
文章引用
段 誉,孙 磊,张春富,辅小荣,王玲玲. 针对火箭弹的高度和空速数据采集技术研究
Research on Altitude and Airspeed Data Acquisition Technology of Rocket[J]. 软件工程与应用, 2022, 11(06): 1204-1211. https://doi.org/10.12677/SEA.2022.116122
参考文献
- 1. 陆地, 周俊涛, 孙晓飞, 尚迪, 毕可华, 杜瑶芳. 基于无人机技术的口岸核与辐射突发事件应急侦测系统研制[J]. 中国口岸科学技术, 2022, 4(7): 4-10.
- 2. 倪育德, 张振楠. 飞行数据交互分析系统的设计与实现[J]. 现代电子技术, 2022, 45(5): 110-116.
- 3. 史晓军, 张昌荣, 刘光远, 徐扬帆, 刘祥, 贾霜. 飞行器大气数据系统测压校准风洞试验若干环节的实现方法研究[J]. 电子测量技术, 2020, 43(1): 12-17.
- 4. Laurence III, R.J. and Argrow, B.M. (2019) Numerical Calibration of a Low-Speed sUAS Flush Air Data System. Journal of Atmospheric and Oceanic Technology, 36, 1577-1590. https://doi.org/10.1175/JTECH-D-18-0208.1
- 5. Zhao, J.J. (2021) Comparative Study on Integrated Air Data System of Civil Aircraft. The International Conference on Optoelectronic Materials and Devices (ICOMD 2020), Guangzhou, 18-20 December 2020, Vol. 11767, 117671Q. https://doi.org/10.1117/12.2592400
- 6. 蒋红娜, 姜宏伟, 白雪. 机载光学大气数据系统研究与应用[J]. 国外电子测量技术, 2021, 40(5): 146-149.
- 7. Zhang, H., Wang, J.C., Sun, Y.Y. and Wang, W. (2021) Design and Research of MCU Applied in UAV Data Acquisition System. Journal of Physics: Conference Series, 1802, Article ID: 042017. https://doi.org/10.1088/1742-6596/1802/4/042017
- 8. 翁晨帆. 无人机数据采集系统的优化传输策略研究[D]: [硕士学位论文]. 南昌: 南昌大学, 2019.
- 9. Li, Z.W., Cheng, Y.M., Wang, H.B. and Wang, H.X. (2021) Fault Detection Approach Applied to Inertial Navigation System/Air Data System Integrated Navigation System with Time-Offset. IET Radar, Sonar & Navigation, 15, 945-956. https://doi.org/10.1049/rsn2.12092
- 10. 胡金艳. 某型无人机多通道数据采集系统的研究与实现[D]: [硕士学位论文]. 西安: 西京学院, 2017.
- 11. 戴洪德, 吴晓男, 于进勇. 基于虚拟仪器技术的大气数据计算机实验系统设计[J]. 测控技术, 2014, 33(2): 43-45.
- 12. 王珊. 基于ARM9的近程无人机数据采集系统[J]. 无线电工程, 2013, 43(8): 40-43.
- 13. Revanasiddappa, B.K.V. and Ramana, R. (2013) CPLD Implementation of Low Power Multi Serial to Ethernet Gateway for UAV Data Acquisition Systems by Using PIC. International Journal of Innovative Science and Modern Engineering (IJISME), 1, No. 9.
- 14. 王晓甜, 毛永毅. 人工增雨火箭弹爆炸声程差采集系统设计[J]. 电子设计工程, 2022, 30(2): 16-19.
- 15. 李鹏云. 高旋火箭弹滚转角高精度测量方法研究[D]: [硕士学位论文]. 太原: 中北大学, 2021.
- 16. 范文涛. 旋转火箭弹制导控制系统设计及其半实物仿真试验[D]: [硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2019.
- 17. 李茜雯, 陈健锋, 崔苗, 张广驰. 可充电无人机辅助数据采集系统的飞行路线与通信调度优化[J]. 物联网学报, 2022, 6(3): 113-123.
- 18. 傅俊豪, 吴勇. 无人机飞行任务管理系统的设计与实现[J]. 信息与电脑(理论版), 2021, 33(2): 120-122.
- 19. 张红军. 一种基于无人机协作的节点数据采集框架[J]. 国外电子测量技术, 2021, 40(10): 127-131.
- 20. 邓磊刚. 基于时间戳的外场分布式高速数据采集存储技术研究[D]: [硕士学位论文]. 西安: 西安工业大学, 2022.
- 21. 肖远鹏. 基于STM32的无人机飞行控制系统设计[J]. 电子技术与软件工程, 2020(14): 90-91.