Dynamical Systems and Control
Vol.06 No.01(2017), Article ID:19580,6
pages
10.12677/DSC.2017.61004
Torsional Smale Horseshoe and Model Shift Mapping
Haiyun Xu, Fangyue Chen, Erlin Li
School of Science, Hangzhoudianzi University, Hangzhou Zhejiang

Received: Dec. 29th, 2016; accepted: Jan. 17th, 2017; published: Jan. 20th, 2017
Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



ABSTRACT
Based on the knowledge of symbolic dynamical systems and model shift mapping, a torsional Smale horseshoe model is presented, which is described by quinary. Under certain parameters, a local linear representation of the model is found and proved to be topologically conjugate with the traditional shift map.
Keywords:Bilateral Symbol Space, Torsional Smale Horseshoe, Model Shift Mapping, 5-Part Cantor Set, Topological Conjugacy

扭转型Smale马蹄模型及拟移位映射
胥海云,陈芳跃,李二林
杭州电子科技大学理学院,浙江 杭州

收稿日期:2016年12月29日;录用日期:2017年1月17日;发布日期:2017年1月20日

摘 要
基于符号动力系统及拟移位映射,给出了一种用5-进制小数描述的扭转型Smale马蹄模型,找到了该模型的一个局部线性表示,并证明它与传统的移位映射拓扑共轭。
关键词 :双边符号空间,扭转型Smale马蹄,拟移位映射,Cantor五分集,拓扑共轭

1. 引言
在符号动力系统的广泛应用之中,最富思想性和影响最为深远的是Smale马蹄,它解释和澄清了某些带有根本性的动力系统基本问题 [1] [2] [3] [4] ,而它的动力学行为可以通过符号序列空间的移位映射来刻画,在动力系统的研究中起了巨大的推广作用 [5] [6] [7] [8] [9] 。对各种复杂系统,如果能找到子系统与符号动力系统中的移位映射拓扑共轭,那么原系统的动力学性质就易于讨论了。如文献 [10] 定义了双边符号空间上的一种拟移位映射,且成功地刻画了Mlbius带上一类映射的吸引子的结构及动力学的移位映射。文献 [11] 借助5进制小数给出圆盘上的微分自同胚不变集与双边符号空间上的移位映射拓扑共轭的一个简洁的证明。传统的Smale马蹄构造是沿垂直方向线性压缩而沿水平方向线性拉长,并弯曲成马蹄形状放回原来的图形上。本文考虑先扭转再弯曲成马蹄形状放回原图的情况,找到它的局部线性表示及拟移位映射,同时证明了该拟移位与传统的移位映射拓扑共轭。本文的思想和方法也适合拉伸和压缩非线性的各种曲边马蹄模型,在许多符号空间的自映射及动力系统的研究中有一定的意义。
2. 扭转型Smale马蹄表示
在欧式平面 中取一个单位正方形
中取一个单位正方形 ,定义一个从
,定义一个从 到
到 的映射
的映射 如下:先把
如下:先把 沿水平方向线性拉长
沿水平方向线性拉长 倍,再沿竖直方向压缩
倍,再沿竖直方向压缩 倍,得到一个
倍,得到一个 单位长和
单位长和 单位宽的长方形;再把这个长方形扭曲成马蹄形状放在
单位宽的长方形;再把这个长方形扭曲成马蹄形状放在 上。本文中我们考虑
上。本文中我们考虑 的扭转情况,如图1、图2(a)和图2(b)。
的扭转情况,如图1、图2(a)和图2(b)。
对于图2,显然,映射 将
将 中的长方形
中的长方形 、
、 和
和 分别映射到长方形
分别映射到长方形 、
、 和
和 ,这个映射是局部线性的,即有
,这个映射是局部线性的,即有
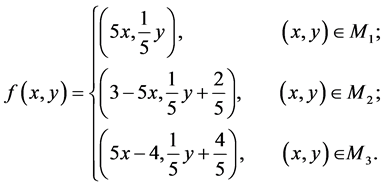 (1)
(1)
于是,由 可得到
可得到 的不变集
的不变集 ,其中
,其中 ,
, 为
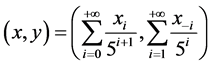
为 区间上的Cantor五分集,将
区间上的Cantor五分集,将 上点
上点 表示成级数:
表示成级数:
 (2)
(2)
或
 (3)
(3)
若 ,则
,则 的展开式(2)或(3)中可以使
的展开式(2)或(3)中可以使 (或
(或 )
) 。
。
事实上,以式(2)为例,若 使
使 ,即
,即 ,则有
,则有 ,同理,若
,同理,若
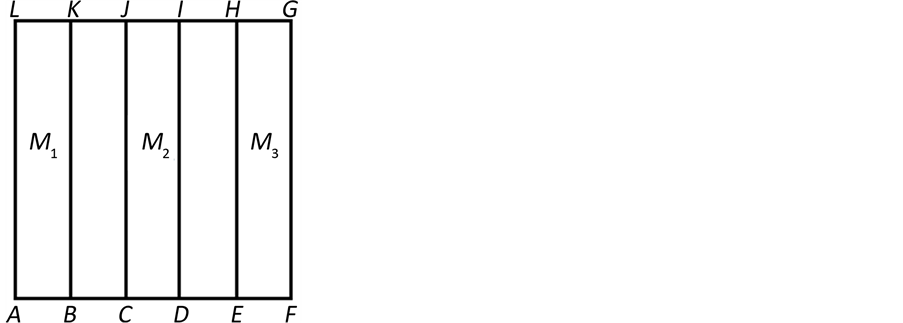
Figure 1. The unit square
图1. 单位正方形
 (a)
(a) (b)
(b)
Figure 2. Geometric horseshoe torsional transformation diagram
图2. 几何马蹄扭曲变换图
 使
使 ,即
,即 ,则有
,则有 ,所以论断成立。于是,对于
,所以论断成立。于是,对于 ,因为
,因为
 (4)
(4)
即 对应一个双向无穷序列,
对应一个双向无穷序列, ,这种对应是一一的,我们称这个对应是
,这种对应是一一的,我们称这个对应是 的点的符号表示。即
的点的符号表示。即 ,可以证明
,可以证明 是
是 到
到 的同胚映射。
的同胚映射。
由式(1)和式(4),对于任意的 ,有
,有
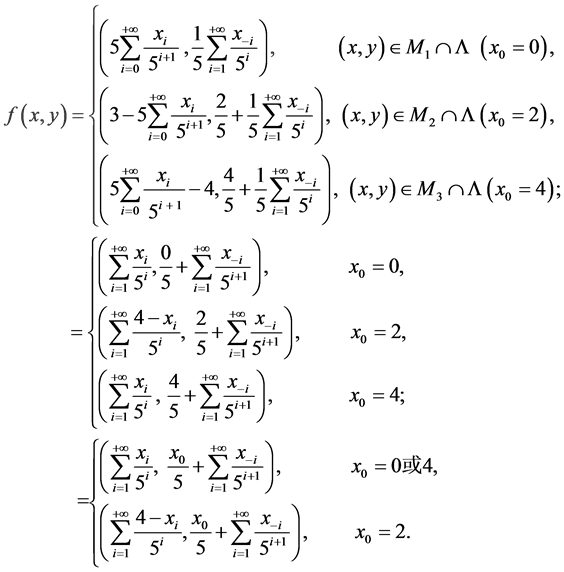
即
 (5)
(5)
即 相当于
相当于 中定义的映射
中定义的映射 。
。
 (6)
(6)
这就是映射(1)的双边序列空间的表示(仅仅这里取的3个符号为 )。
)。
3. 符号序列空间上的一个拟移位映射
设由3个符号 构成的双边符号序列空间为
构成的双边符号序列空间为 ,即
,即 。传统的移位映射为
。传统的移位映射为
 (7)
(7)
其中 。现定义一种拟移位映射:
。现定义一种拟移位映射:
定义1:对 ,
,
 (8)
(8)
定理1: 与
与 拓扑共轭。
拓扑共轭。
证明:首先在 上定义距离为
上定义距离为
 (9)
(9)
其中
现设 为映射:
为映射:
 (10)
(10)
易看出 是一个一一映射。下证
是一个一一映射。下证 的连续性。
的连续性。
设 ,
, ,则有
,则有


 ,使得
,使得 ,显然,此时
,显然,此时 。当
。当 时,由距离
时,由距离 的定义(9)可得,对
的定义(9)可得,对 ,有
,有 ,显然此时
,显然此时 。仍由(9)式,有
。仍由(9)式,有 。即取
。即取 ,当
,当 时,有
时,有 。同理可得
。同理可得 的连续性。故
的连续性。故 是
是 到自身的一个同胚映射。
到自身的一个同胚映射。
进一步有:

即 ,即
,即 与
与 拓扑共轭,于是有如下的交换图3。因而
拓扑共轭,于是有如下的交换图3。因而 与
与 拓扑共轭,证毕。
拓扑共轭,证毕。
4. 结论
Smale马蹄模型构造可以作多种改变,例如,可以沿垂直方向线性拉长而沿水平方向线性压缩,并以各种方式弯曲马蹄形状或类马蹄形状放回到原来的图形上。进而,拉长和压缩可以不必是线性的,形

Figure 3. A commutative diagram establishing a one-to-one correspondence between  and
and 
图3. 与
与 之间的一一对应交换关系图
之间的一一对应交换关系图
成种种曲边的马蹄型。本文,仍然是在拉长和压缩式线性的基础之上,通过扭转弯曲成马蹄形状,并通过5进制小数来刻画这种局部线性的映射,严格证明了这种映射与传统的移位映射拓扑共轭。但对于各种不同马蹄模型,得到的各种拟移位映射之间又有什么关系,这些拟移位映射能否刻画其它复杂的映射等,都有待进一步研究。
文章引用
胥海云,陈芳跃,李二林. 扭转型Smale马蹄模型及拟移位映射
Torsional Smale Horseshoe and Model Shift Mapping[J]. 动力系统与控制, 2017, 06(01): 28-33. http://dx.doi.org/10.12677/DSC.2017.61004
参考文献 (References)
- 1. Stewart, H.B. and Thompson, J.M. (1986) Nonlinear Dynamics and Chaos. John Wiley & Sons, NY.
- 2. Yang, X.S. and Tang, Y. (2004) Horseshoes in Piecewise Continuous Maps. Chaos, Solitions & Fractals, 19, 841-845. https://doi.org/10.1016/S0960-0779(03)00202-9
- 3. 周作领. 符号动力系统[M]. 上海: 上海科技教育出版社, 1997.
- 4. 张筑生. 微分动力系统原理[M]. 北京: 科学出版社, 1987.
- 5. Arroyo, D. and Alvarez, G. (2014) Application of Gray Codes to the Study of the Theory of Symbolic Dynamics of Unimodal Maps. Communications in Nonlinear Science and Numerical Simulation, 19, 2345-2353. https://doi.org/10.1016/j.cnsns.2013.11.005
- 6. Broer, H.W. and Takens, F. (2010) Preliminaries of Dynamical Systems Theory. Handbook of Dynamical Systems, 3, 1-42. https://doi.org/10.1016/S1874-575X(10)00309-7
- 7. Hirsch, M.W., Smale, S. and Devaney, R.L. (2013) Discrete Dynamical Systems, Differential Equations, Dynamical Systems, and an Introduction to Chaos. Elsevier, Oxford, 329-359.
- 8. Smale, S. (1967) Differentiable Dynamical Systems. Bulletin of the American Mathematical Society, 73, 747-817.
- 9. Chen, F.Y. and Chen, F.J. (2003) Model Shift and Strange Attractor on Möbiusstrip. Applied Mathematics & Mechanics, 24, 845-852. https://doi.org/10.1007/BF02437817
- 10. 麦结华. 用5-进制小数描述Smale马蹄映射[J]. 科学通报, 1993, 38(21): 1932-1935.
- 11. Palis, J. and Melo, W.D. (1982) Geometric Theory of Dynamical Systems. Springer-Verlag, New York, 115-181.