Dynamical Systems and Control
Vol.06 No.02(2017), Article ID:20415,8
pages
10.12677/DSC.2017.62008
The Static and Dynamic Characteristics Analysis of Table Sorting Device Ontology
Zhijun Zhou, Zhiguo An, Ling Xue, Chaoyue Gu, Yunfeng Feng, Feng Liu, Kexian Chen
School of Mechanotronics & Vehilce Engineering, Chongqing Jiaotong University, Chongqing

Received: Apr. 6th, 2017; accepted: Apr. 26th, 2017; published: Apr. 30th, 2017

ABSTRACT
The finite element analysis of the sorting device is to simulate the real physical system by means of digital approximation, which can accurately predict the performance of the sorting device and shorten its development cycle. According to the required body structure and performance requirements, the overall design scheme and the structure of the manipulator are established. The stress and displacement cloud charts and static stiffness of the manipulator are analyzed by the turntable sorting device. The top ten-step natural frequency and main vibration type, as well as the displacement curve of a node at the end of the manipulator with the modal change are obtained, which provide the theoretical basis for the further optimization design of the weak dangerous link.
Keywords:Sorting Device, Finite Element, Statics, The Modal Analysis
转台式分拣装置本体静动态特性分析
周志军,安治国,薛令,谷超越,冯云峰,刘丰,陈科先
重庆交通大学机电与车辆工程学院,重庆
收稿日期:2017年4月6日;录用日期:2017年4月26日;发布日期:2017年4月30日

摘 要
分拣装置有限元分析是利用数字近似的方法对其真实物理系统进行模拟,可以准确预测该分拣装置的性能,缩短其研发周期。本文根据所需本体结构及性能要求,确立总体设计方案和机械手结构,以转台式分拣装置为研究对象,分析得到机械手的应力、位移云图和静刚度强度情况,并通过模态分析找到了前十阶的固有频率和主振型以及机械手臂末端某一节点随模态变化的位移曲线图,为其薄弱危险环节进一步优化设计提供了理论依据。
关键词 :分拣装置,有限元,静力学,模态分析

Copyright © 2017 by authors and Hans Publishers Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


1. 引言
随着各行各业对自动化要求的提高,工业机器人在代替人力做重复繁重劳动或者危险作业中的重要性得到高度重视,而利用有限元数值分析的方法可以有效地进行优化设计,很多学者在这方面也做了大量的研究。孙建香通过对工业垃圾分拣装置中的机械手模型进行仿真模拟,对其重要部件进行有限元分析,并进一步优化设计 [1] 。纪海峰等使用ABAQUS软件对机械手典型零部件进行有限元分析,校核结果得到在最大载荷下所产生的最大应力,为CAD/CAE技术在教学用轻型机械手研发中提供了参考依据 [2] 。董凯瑞等对一种机械手装置通过动态虚拟仿真,改进机械手运动规则,并对其进行空间、应力分析,为其优化设计奠定理论依据 [3] 。张艺应用有限元分析对微型机械手关键部位进行了力与位移关系、传动比详细的分析,得到影响其参数变化的原因,并验证了整个微型机械手的性能 [4] 。马睿等通过ANSYS有限元分析软件完成对小臂的有限元静态分析,研究了其刚度和强度,有效地验证了设计的可靠性、科学性和合理性,为其优化设计提供理论依 [5] 。
本文以转台式分拣装置为研究对象,对其本体结构进行了静动态分析,并找到了薄弱环节,为其优化设计提供了理论依据。
2. 转台式分拣装置本体结构
该转台式分拣装置本体结构大部分采用铝合金材料,其外形尺寸为 ,垂直运动同步带滑台的有效行程为500 mm,水平运动同步带滑台的有效行程为270 mm,机械手采用2组7齿齿轮啮合结构,最大张角间距为165 mm,其手爪闭合时整体的最大长宽高为
,垂直运动同步带滑台的有效行程为500 mm,水平运动同步带滑台的有效行程为270 mm,机械手采用2组7齿齿轮啮合结构,最大张角间距为165 mm,其手爪闭合时整体的最大长宽高为 。其本体结构三维模型如图1所示。
。其本体结构三维模型如图1所示。
3. 转台式分拣装置模态分析理论
对于转台式分拣装置,可将其看作是一个多自由度的线性系统。对于一般多自由度的系统而言,任何运动皆可以由其自由振动的模态来合成,有限元的模态分析就是建立模态模型并进行数值分析的过程 [6] 。在物理坐标系下,描述N自由度离散振动系统的运动微分方程为:
 (1)
(1)
式(1)中: ——质量矩阵(对称且正定),
——质量矩阵(对称且正定), ;
; ——阻尼矩阵,
——阻尼矩阵, ;
;
 ——刚度矩阵(对称且正定或半正定),
——刚度矩阵(对称且正定或半正定), ;
; 、
、 、
、 ——N维位移、速度和加速度响应向量;
——N维位移、速度和加速度响应向量; ——N维激振力向量。
——N维激振力向量。
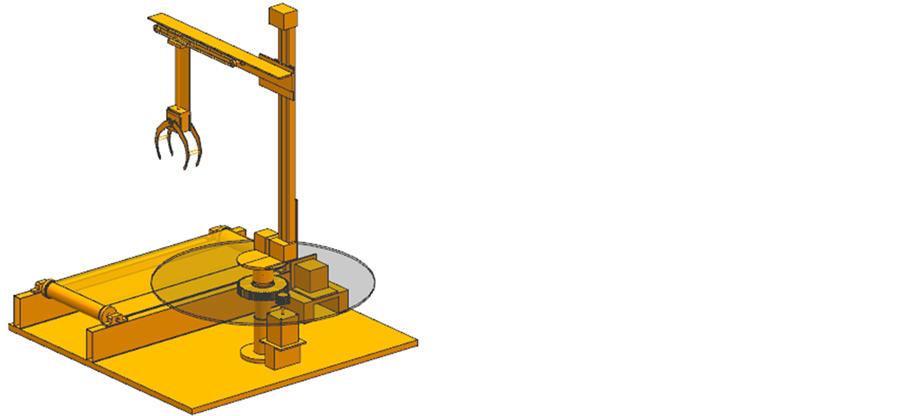
Figure 1. Body structure of turntable sorting device
图1. 转台分拣装置本体结构
由于结构的阻尼对其模态频率及振型的影响很小,可以忽略不计。因此该线性系统结构模态分析的实质即求解有限个自由度的无阻尼或者无载荷状态下的运动方程的模态矢量。因此,取载荷向量 为0值时,得到系统在无阻尼状态下的自由振动方程:
为0值时,得到系统在无阻尼状态下的自由振动方程:
 (2)
(2)
方程具有下列简谐运动形式的解:
 (3)
(3)
式(3)中: ——位移矢量的幅值;
——位移矢量的幅值; ——简谐运动的角频率。
——简谐运动的角频率。
将(3)式代入(2)式得到:
 (4)
(4)
由于式(4)在任意时刻t均成立,故去掉含t的项,得到:
 (5)
(5)
其中 有非零解的条件是系数行列式值为0,即:
有非零解的条件是系数行列式值为0,即:
 (6)
(6)
式(6)左边即为 多项式,令
多项式,令 ,可以解出其一组离散根
,可以解出其一组离散根 ,将式(6)代入式(5)得到矢量
,将式(6)代入式(5)得到矢量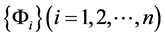 ,使得下式成立:
,使得下式成立:
 (7)
(7)
式(7)中: ——结构系统的第
——结构系统的第 个特征值;
个特征值; ——对应的第
——对应的第 个特征矢量。
个特征矢量。
4. 有限元模型的建立
4.1. 有限元网格的划分
综合考虑了该分拣装置的传动精度和效率,对其几何模型结构进行适当简化,忽略传动系统和电机对该装置本体结构的影响因素,并且去除点不必要的倒角、圆角和螺钉安装孔等细小的特征。利用ABAQUS有限元分析软件,采用四面体单元对其分拣装置本体结构进行网格划分,得到该装置有限元网格划分模型如图2所示。
4.2. 静力学分析参数的确定
建立载荷模型,如图3所示,以机械操作手为研究对象,进行受力分析。
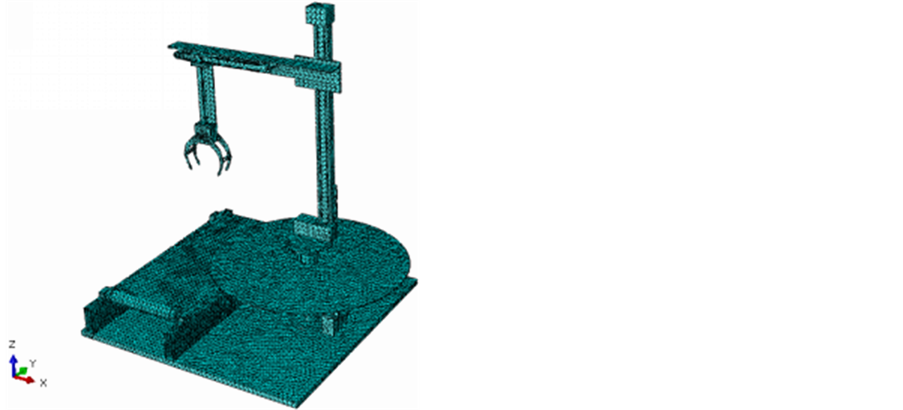
Figure 2. Finite element mesh model of turret sorting device body structure
图2. 转台分拣装置本体有限元网格模型
Figure 3. Load force model
图3. 载荷受力模型
则:
 (8)
(8)
式中: ——机械手受力,单位:N;
——机械手受力,单位:N; ——横梁对机械手的转矩,单位:N/m;
——横梁对机械手的转矩,单位:N/m;
 ——机械臂的质量,单位:N;
——机械臂的质量,单位:N; ——抓取物对机械手内壁的摩擦力,单位:N;
——抓取物对机械手内壁的摩擦力,单位:N; ——机械手抓取时内壁1/2的距离,单位:mm;
——机械手抓取时内壁1/2的距离,单位:mm; ——机械手中心到垂直同步带滑台距离,单位:mm;经测量计算
——机械手中心到垂直同步带滑台距离,单位:mm;经测量计算 ,
, ,
, ,
, ,取摩擦系数
,取摩擦系数 ;计算得:
;计算得: ,
, 。
。
根据式(8)求得: 。
。
5. 结果与分析
5.1. 静力学分析
针对机械手、机械手臂和水平同步带滑台不同材料属性(钢、ABS),对机械手臂末端沿z轴负方向施加不同载荷(12.33N, 15N, 18N, 20N),分别在机械手、机械手臂、水平同步带滑台和垂直同步带滑台取某个单元(单元编号分别为:111827、24651、28373、21529),获得其应力曲线如图4。
通过比较钢和ABS材料对应应力曲线,可知ABS的同一单元同一载荷的应力值相对较小,机械结构较稳定。因此在机械手、机械手臂和水平同步带滑台机械材料选取中优先选择ABS。
其中在机械手臂末端沿z轴负方向施加12.33 N的载荷中,通过计算得到其静刚度为 。通过有限元静力学分析,得到位移和应力云图如图5所示。
。通过有限元静力学分析,得到位移和应力云图如图5所示。
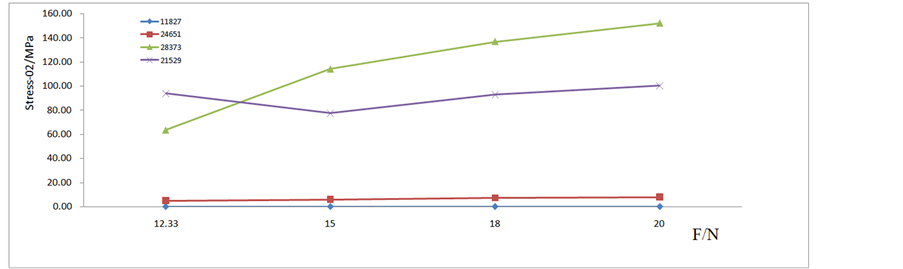
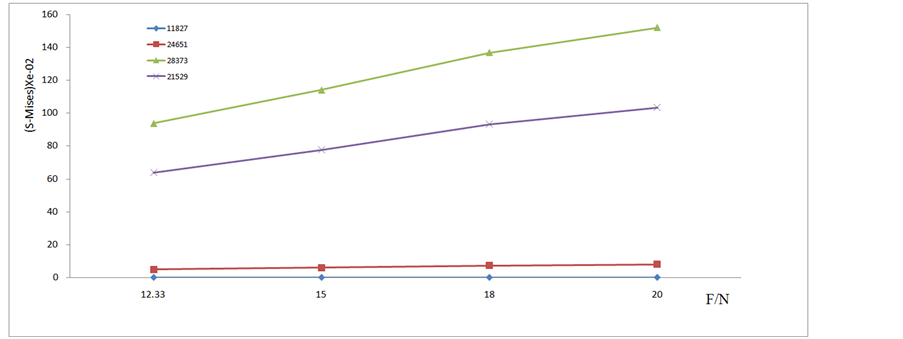
Figure 4. Corresponding steel, ABS material stress curves of robot, mechanical arm and horizontal timing belt slide
图4. 机械手、机械手臂和水平同步带滑台对应钢、ABS材料应力曲线
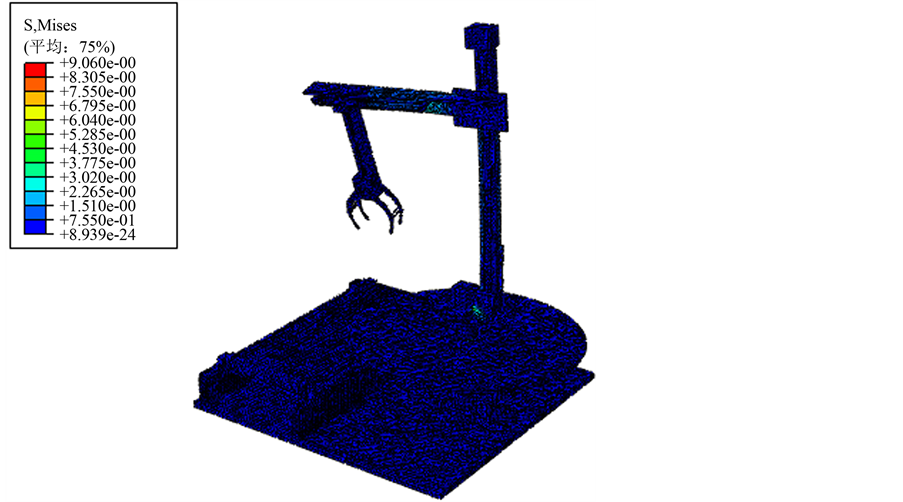 (a) 应力云图
(a) 应力云图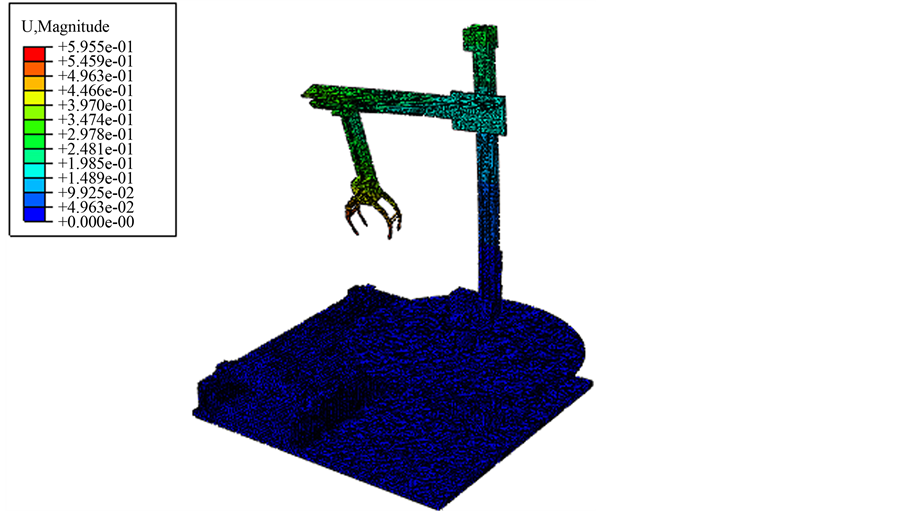 (b) 位移云图
(b) 位移云图
Figure 5. Stress and displacement cloud charts of static analysis
图5. 静力学分析应力、位移云图
通过图5可知,综合位移为0.5955 mm,最大应力为9.06 MPa。根据国际标准,ABS的屈服强度为50 MPa,表明该转台式分拣装置满足设计要求。
5.2. 模态分析
采用ABAQUS中的Lanczos求解器,提取了前10阶模态频率和主振型,如表1所示。
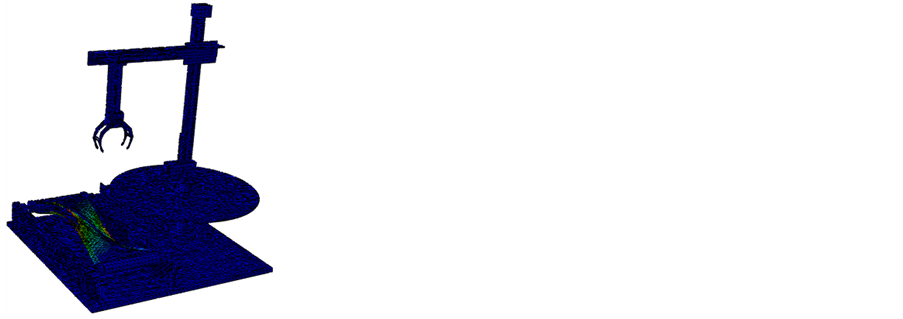
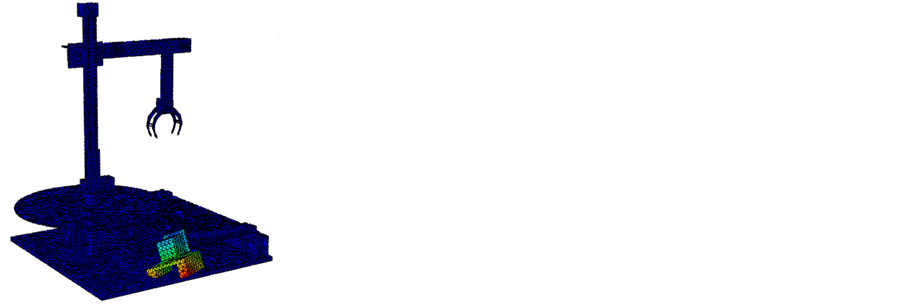
由于篇幅有限,只给出第1、2、5、6、8、9阶振型图,如图6所示。
通过选取机械手臂末端101458节点,绘制了该节点随模态变化的位移曲线,如图7所示。

Table 1. The top ten-step vibration table of turntable sorting device
表1. 转台式分拣装置前十阶振型表
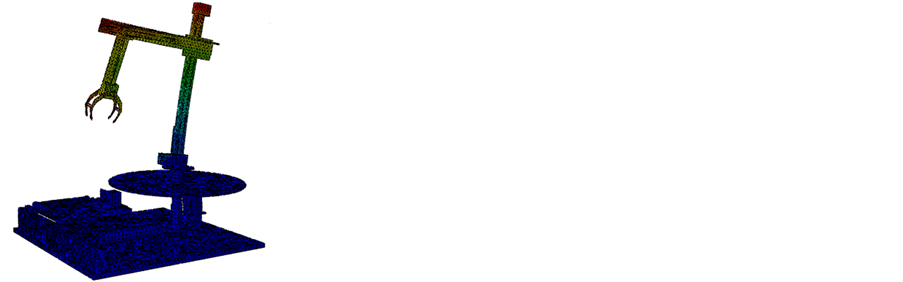
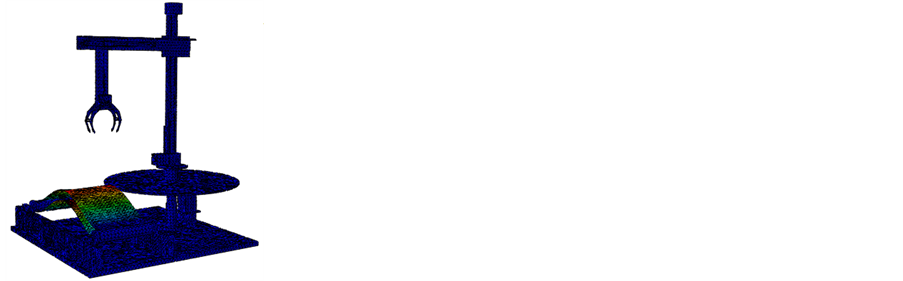
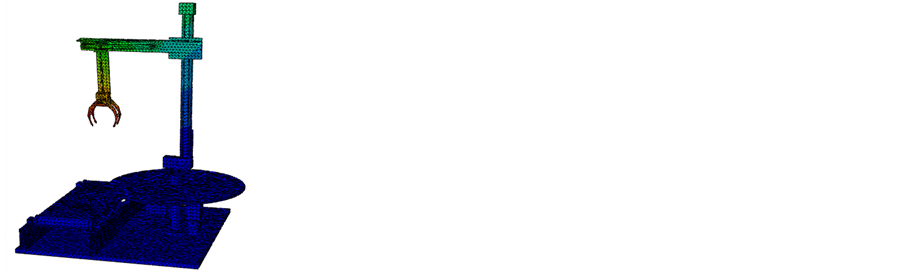 (a) 第一阶 (b) 第二阶 (c) 第五阶
(a) 第一阶 (b) 第二阶 (c) 第五阶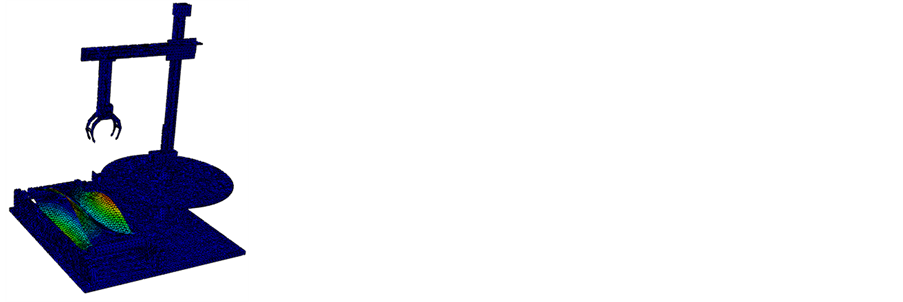
 (a) 第六阶 (b) 第八阶 (c) 第九阶
(a) 第六阶 (b) 第八阶 (c) 第九阶
Figure 6. 1,2,5,6,8,9 step vibration diagram of turntable sorting device
图6. 转台式分拣装置1、2、5、6、8、9阶振型图
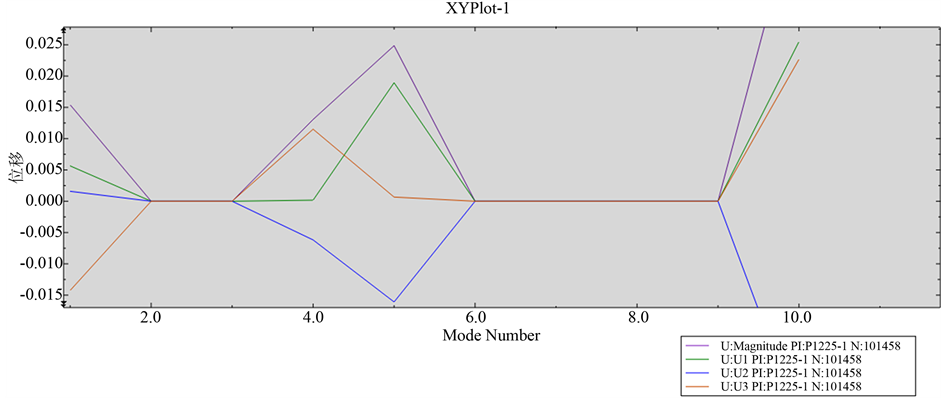
Figure 7. Displacement curve of the manipulator end node 101458 with modal change
图7. 机械手臂末端节点101458随着模态变化的位移曲线
由表1和图6、图7可知,该分拣装置前十阶的固有频率相差较大,具有一定的抗震性能。一方面,机械手臂是该分拣装置的重要组成部分,其变形影响到整个分拣过程的定位精度和抓取准确性,其中前十阶的主振型有三处为机械手臂的振动变形,且振动幅度较大,分析其原因是因为机械手臂选用材料强度不足和系统稳定性不够好。另一方面输送带的扭振变形较大,其中前十阶的主振型有六处为输送带的振动变形,对分拣完成的物件运送不够平稳,分析其原因是由于输送结构制作时张紧较困难,输送带与转盘沿z轴负方向有平行度误差,从而造成输送稳定性不足。因此需要改进机械手的材料刚度以及增大输送系统的传送平稳性,以达到设计要求。
6. 总结
文章通过对转台式分拣装置进行静力学和模态分析,分析了其静刚度,找到了造成结构刚度较弱的部位,还提取了前十阶的固有频率和主振型以及机械手臂末端某一节点随模态变化的位移曲线图,找到了其振动位移相对较大的部位并分析了其原因,为该转台式分拣装置的结构分析和结构进一步优化提供了参考依据。
文章引用
周志军,安治国,薛 令,谷超越,冯云峰,刘 丰,陈科先. 转台式分拣装置本体静动态特性分析
The Static and Dynamic Characteristics Analysis of Table Sorting Device Ontology[J]. 动力系统与控制, 2017, 06(02): 60-67. http://dx.doi.org/10.12677/DSC.2017.62008
参考文献 (References)
- 1. 孙建香. 工业垃圾分拣机械手的设计及性能仿真研究[D]: [硕士学位论文]. 青岛: 中国海洋大学, 2014
- 2. 纪海峰, 邵娟, 等. 教学用轻型机械手的设计运动仿真及有限元分析[J]. 现代制造技术与装备, 2015(2): 79-81.
- 3. 董凯瑞, 张帆. 基于CATIA的机械手装置的运动仿真及有限元分析[J]. 电脑编程技巧与维护, 2015(1): 75-77.
- 4. 张艺, 徐锡林. 微机械手的传动分析[J]. 上海交通大学学报, 1999, 33(7): 862-864.
- 5. 马睿, 胡晓兵, 万晓东. 基于ANSYS的小型机器人小臂的有限元静态分析[J]. 机械设计与制造, 2012(9): 4-6.
- 6. 曹妍妍, 赵登峰. 有限元模态分析理论及其应用[J]. 机械工程及其自动化, 2007(1): 73-74.